Mechanical FEA performed by Oxford Design Group in 2007

Engineering Report
Target Shaft
Prepared by:
Liz Mills
Department of Physics
University of Oxford e.mills1@physics.ox.ac.uk
August 2007
Structural analysis of target shaft designed for Sheffield University
.
Approved by:
1
Contents
Target Shaft a) Introduction…………………………………………………………...3 b) Target geometry and material properties …………………………4 c) Stress Evaluation ……………………………………………………..6 d) Fatigue Assessment …………………………………………… …..13 d) Conclusion……………………………………………………………14
2
Introduction
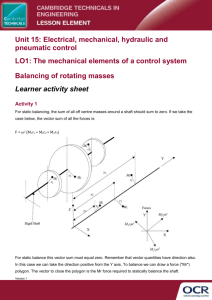
This report summarises the structural analysis carried out on the target shaft in operation at Sheffield University. During operation, the shaft actuates vertically once per second, but over a time scale of the order of 30ms. A graph showing the approximate displacement and speed of the shaft can be found below (n.b. in reality, these graphs are more parabolic, but it is simpler to see the operation of the shaft in this format).
Speed and Displacement of Target shaft -v- time
6
0
4
2
-10
-20
-30
-40
0
speed
displacement
0.965
0.970
0.975
0.980
0.985
Time (s)
0.990
0.995
-50
1.000
It can be seen that the shaft is stationary for 970ms, before accelerating downwards at
780m/s
2
for 7.5ms. The shaft is then accelerated upwards at 780m/s
2
for 15ms before being decelerated downwards at the same rate for 7.5ms. This brings the shaft back to its original position. The 30ms when the shaft is in operation is known as the actuation period. For this study, we have assumed, rather conservatively, that there is a driving frequency in the order of 1/actuation period = 1/30ms = 33.333Hz. (see the last paragraph in the Conclusions section for discussion).
The shaft is constrained radially by the presence of two bearings. During operation, these bearings were shown worn out. It is not the aim of this report to determine why the bearings had worn out, but to assess if the structural integrity of the target shaft could be compromised by the range and level of loads that could arise as a result of out-of-tolerance off-sets and misalignment of the bearings.
3
Target geometry and material properties
The shaft is made of titanium type ASTMB348 GR2. Material properties used are listed in table 1 below.
Young’s Modulus
Poisson’s ratio
Shear Modulus of Elasticity
Mass Density
Gravity
1.028e+005 MPa
0.361
37766.3 MPa
4.51e-006 kg/mm
3
9807mm/s
2
Table 1 Material properties used in this model
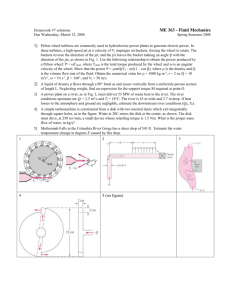
The shaft is orientated as shown in figure 1.
4
1 x 6 mm
X-section of lower shaft
Figure 1 Orientation of Shaft - red is y direction, blue is z direction and green is x direction
5
Engineering drawing of the target shaft
6
Stress Evaluation
Under normal operating conditions when the shaft is driven up and down in vertical direction, there should be very little or no load acting perpendicular to the shaft axis.
At 100g, the maximum downward load on the shaft due to gravity is less than 100N, generating an axial stress of no more than 10MPa which is well below the allowable design stress of titanium.
The only possibilities for the shaft exceeding its design limit is:-
1) That there are sideway force causing the shaft to bend beyond its bending stress limit;
2) Its cyclic stress range exceeds the allowable fatigue stress limits;
3) That there are undetected cracks at the shaft cross section.
This report addresses cases (1) & (2) only.
Under a perfect design condition, there is no obvious sideway load on the shaft, and therefore (1) could not happen. However, the possibility of out-of tolerance off-sets and misalignment of the upper and lower bearings by which the shaft is guided through could lead to sideway (lateral) loads being “introduced” to it. The following sections outline the hypothesis which these lateral loads could be introduced:
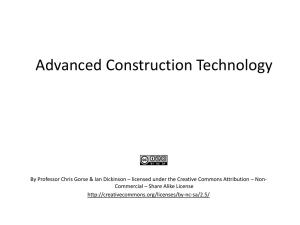
If the driving frequency of the shaft coincides with any of the shaft’s natural frequencies, it will resonate, resulting in the shaft fluttering to the corresponding mode shape at that frequency. For instance, as outlined in the following diagram, if the resonance mode develops a shape similar to the shaft being cantilevered at the bearing point, it is possible for it to take up such a shape even though there is no external force causing it to bend in that direction.
7
Resonance mode of shaft
Shaft could flex like this under a purely vertical motion
Natural frequency analysis
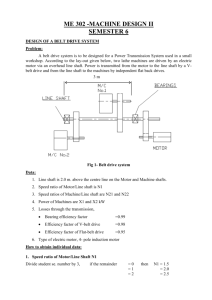
A modal (natural frequency) analysis was carried out on the shaft with varying bearing positions. By examining the first and second modal frequency graphs, it can be seen that it is possible for the shaft to resonate at a certain positions. A modal frequency of around 33.3Hz occurs when the free end unsupported length of the shaft extends 287.5mm its lower bearing. i.e. approximately 4.5mm displacement from its rest position. The graphs below outline the results of this analysis:
First and second modal frequency
-v- displacement of bearing
1st modal
2nd modal
42
40
38
36
34
32
255 260 265 270 275 280 285
Displacement of bearing from force (mm)
290 295
8
3rd modal
3rd modal frequency -v- displacement of bearing
160
155
150
145
140
135
130
255 260 265 270 275 280 285
Displacement of bearing from force (mm)
290 295
Fourth and fifth modal frequency -v- displacement of bearing
4th modal
5th modal
240
230
220
210
200
190
180
270
260
250
255 260 265 270 275 280 285
Displacement of bearing from force (mm)
290 295
9
10
The above results gave us reason to believe that the shaft could develop a bending mode during actuation without any physical bending load being applied to it.
Simulating the bending mode
The top and bottom bearings are maximally misaligned, producing a tilting of the target shaft as shown in the diagram below. At this tilting angle (0.0638
0 tip of the shaft would displace a total of “x” amount.
), the lower
The tilting
The simulation upper bearing
L
1 lower bearing
θ x = L2 * tan θ
θ = 0.0638
0
L
2 x x
F
Shaft tilted to take up the clearance gap caused by the misaligned bearings
Shaft lower tip being forced to displace an “x” amount by a side load “F”
To simulate this, a force F is applied to the lower tip of the shaft producing a lateral displacement of “x”. The subsequent stresses are then calculated. Force components due to the dead weight of the magnet (at 0.022 Kg) and the gravity load of the shaft itself (see diagram below), are included in the stress analysis. The analysis assumes that the shaft is cantilevered (fully fixed) at the upper bearing position.
11
θ
=
=
W sin θ
W = m * 100g
=W sin θ
F
= W cos θ
W cos θ
FE results:
4.3
4.2
4.1
4.0
3.9
3.8
3.7
3.6
3.5
3.4
3.3
3.2
3.1
3.0
255
Maximum total stress and stress on lower
Stress due to a sideway force F from force
lower bearing stress
maximum stress
260 265 270 275 280 285
Diplacement of lower bearing from force (mm)
290 295
12
F
Stress due to components of W
Upper bearing stress -v- displacement of lower bearing from force
Top bearing
stress
1.90
1.89
1.88
1.87
1.86
1.85
1.84
1.83
1.82
1.81
255 260 265 270 275 280 285
Diplacement of lower bearing from force (mm)
290 295
0.44
0.43
Force used and Deformation produced
-v- displacement of lower bearing
from force
0.090
0.085
0.42
0.080
0.41
0.075
0.40
0.070
0.39
Deformation produced
Force used to produce deformation
255 260 265 270 275 280 285
Displacment of bearing from end (mm)
290 295
0.065
The maximum bending stress, due to mechanical load only, was found to be
6.51N/mm
2
. At resonance, a “Q” factor of up to 5 could apply, raising the stress by as much as 5 times the static stress to 32.55N/mm
2
. This is a significant bending stress on the shaft, though it is still well below the allowable bending stress limit for this material. The maximum stress was found near the top bearing, at the constrained position.
For fatigue assessment, a stress range of 2 x 32.55 N/mm 2 will be used.
13
Fatigue assessment
Using the fatigue data given in “Fatigue and Creep in Titanium grade 2” by J.A.M.
Ferreira, J.D.M. Costa and P.N.B. Reis, a typical S-N curve was plotted.
450
400
B
S-N Curve for Grade 2 Titanium -
(Plotted using coefficients given in
"Fatigue and Creep in Titanium grade 2"
by J.A.M. Ferreira, J.D.M. Costa and P.N.B. Reis)
350
300
250
200
150
100
0 2000000 4000000 6000000 8000000 10000000
Number of Cycles (N)
Typical S-N curve For Grade 2 Titanium
The above S-N curve shows an infinite fatigue life for any cyclic stress range under
140 N/mm
2
.
14
Conclusions
There is no definitive method to calculate what the exact level of stresses would be expected in the shaft because the as-built tolerance and bearing misalignment are somewhat difficult to establish. Stresses used throughout this report were established hypothetically aiming to provide a “bounding” value to the stress level and as such they tend to be higher than they should be.
The analysis shows that it is possible for the target shaft to resonate at the given driving frequency (see comments on the last paragraph). When that happens, the shaft could develop a bending shape even without any physical bending load being applied to it. Our assumption on the applied loads is very conservative which should result in a “worse than real life” result.
Adequate sensitivity studies have been carried out to ensure that the FE model provides consistent results.
Thermal stress has not been considered in this assessment on the assumption that there is an even temperature distribution along the target shaft during operation and any cyclic thermal effect is not significant.
Based on the above assumption, the shaft does not experience any static or fatigue stress which could exceed its allowable design limit during normal operation.
Although the actual driving frequency appears to be at 1 Hz, the cycling period for each individual “dip” is only 30 ms. Given the cycling period, we have made a conservative assumption that it is very similar to a driving frequency of 33 Hz with a long pause in between cycles. It could be argued that the actual driving frequency is nowhere near to 33Hz and there is no chance that the shaft could resonate. However the short cycling period 30 ms would point to the possibility that a vibrational flexing could develop as though it is being driven at 33Hz. The level of resonance could be a lot less than what we have assumed in our fatigue assessment which uses a maximum
“Q” (stress magnification) factor of 5. Such assumption would result in higher stresses, but gives us added confidence that the shaft is safe to operate.
15