Compliant Bistable Dielectric Elastomer Actuators For Binary
advertisement

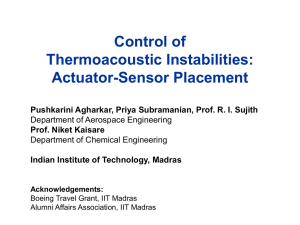
Proceedings of IDECT/CIE 2005: ASME Mechanism and Robotics Conference 24-28 September 2005 Long Beach, California, USA DETC2005-85576 COMPLIANT BISTABLE DIELECTRIC ELASTOMER ACTUATORS FOR BINARY MECHATRONIC SYSTEMS Jean-Sébastien Plante, MIT 77 Massachusetts Ave. Room 3-469 Cambridge, MA, 02139 jsplante@mit.edu Matthew Santer, University of Cambridge Deployable Structures Laboratory, Trumpington St. Cambridge, CB2 1PZ, UK mjs204@eng.cam.ac.uk Steven Dubowsky, MIT dubowsky@mit.edu Sergio Pellegrino, University of Cambridge sp28@eng.cam.ac.uk ABSTRACT In this paper, a new all-polymer actuation approach for binary mechatronic systems is demonstrated. The technology consists of using Dielectric Elastomer actuators in a binary fashion by coupling them with a properly designed compliant structure. Here, a bistable actuator based around the “flip-flop” concept is implemented in which two antagonistic actuators switch a compliant truss between two stable positions. This prototype shows promising performance with output forces ranging from 1 to 3.5 N and displacements of 30% of the actuator dimension. 1 Introduction Future mechatronic applications, ranging from space exploration to industrial systems, will require devices that are simple, robust, lightweight and inexpensive. Current systems using conventional actuators such as electric motors with gears are complex, expensive, heavy, and have high power consumption. Polymer actuators and, in particular, Dielectric Elastomer (DE) actuators, have been proposed for future mechatronic systems because they are lightweight, simple, inexpensive, and have potentially large displacements and specific work output [1,2]. Dielectric elastomer actuators consist of an elastomeric film coated with compliant electrodes on both sides as shown in Fig. 1 (a). Motion occurs when there is a high voltage differential between the two electrodes, as shown in Fig. 1 (b). While a number of potential uses have been proposed, few successful practical applications of DE actuators to mechatronic systems have been demonstrated [2,3,4,6]. In our experience, DE actuators have low reliability, short lifetimes and experience adverse viscous effects when powered for extended periods of time and with significant displacements. Analytical models of the actuator failure mechanisms suggest that these problems are fundamental problems of DE actuators based on viscoelastic elastomers such as VHB 4905/4910 and that attempting to use such DE actuators in a continuous fashion imposes significant performance limitations making them impractical for many applications [5]. V Elastomer film Compliant electrodes (a) (b) Fig. 1: DE actuator operating principle [6]. Recent research at MIT has led to DE actuators with improved performance, robustness and reliability when used in an intermittent fashion. Intermittent use of DE actuators matches well with binary or bistable actuation. Binary actuation can be thought of as the mechanical equivalent to digital electronics, where each actuator “flips” between one of two possible states [7]. Systems can be simple since low-level feedback control is virtually eliminated, along with the associated sensors, wiring, and electronics [8,9]. These devices are fundamentally simple, robust, lightweight, inexpensive, and easy to control. A number of applications of binary actuation such as space walking robots and manipulators have been proposed [9]. These applications typically require a high number of actuators to obtain sufficient levels of accuracy. However, few practical applications of binary actuation technology have yet been developed because of the previously stated disadvantages of conventional actuators. Hence, DE actuators and binary actuation are well matched. The intermittent nature of binary actuation does not limit DE actuator performance and at the same time, the excellent performance, simplicity and low cost of DE allows it to be used in large quantity in binary systems. 1 Copyright © 2005 by ASME In order to design a bistable element to be used in conjunction with a DE actuator, it is useful to classify bistable structures into two types: symmetrically- and asymmetricallybistable [10]. A symmetrically-bistable structure, as indicated by the rollercoaster analogy in Fig. 2 (a), is one in which the two stable states store equal amounts of strain energy. An actuator must supply the energy required to switch the state of the bistable structure and to perform external work. An asymmetrically-bistable structure, as indicated in Fig. 2 (b), has one stable state which has a greater amount of strain energy, i.e. is less energetically preferential than the other stable state. This means that in the transition between the high- to the low-energy stable state, the excess stored strain energy may be released by the structure as useful work output. Asymmetrically-bistable structures are useful when high speed, one-way switching is required. This is not the case for the actuators described in this paper, in which no importance is attached to switching in either direction, so a symmetrically-bistable mechanism is the logical choice for integration with DE actuators. Energy Energy Displacement (a) Symmetric-Bistability Displacement (b) Asymmetric-Bistability Fig. 2: Definition of symmetry of bistability The combination of DE actuators and bistable mechanisms first considered was a flip-flop configuration, where two antagonistic actuators move a bistable element back and forth, see Fig. 3. In the figure, when actuator DE 2 extends, the bistable element is pushed through to a second stable configuration represented by the dotted line. At this point, the bistable element then comes into contact with actuator DE 1, which may then extend to return the bistable element to its original stable configuration. the compliant bistable actuator compare well with analytical predictions. The compliant bistable actuator is shown to be capable of providing more than 1 N over a 25 mm range in about 10 seconds with a non-optimized mass of 220 grams. 2 Compliant Bistable Actuator Design The design objectives were to have an all-polymer bistable actuator with dimensions of ~100×50×50 mm, output displacements of ~25 mm and forces of ~1 N. The selected strategy was to build on the flip-flop concept (see Fig. 3). 2.1 DE Actuator Many robotics applications require their actuators to have high specific work outputs. The specific work output is defined by the ratio of the actuator output work over a complete cycle divided by its mass. Increasing this ratio in DE actuators is most effectively done by maximizing the fraction of active to passive material. Here, the selected strategy used to increase the active mass fraction is the multi-layering of planar polymer films. The details of multi-layered DE actuator design are extensive and are provided elsewhere [12]. The multi-layered DE actuator presented in this study used three individual active film layers stacked between two rigid frames, see Fig. 4. Each film layer has a diamond shape which expands upon voltage application to provide useful motion along the diamond short axis direction, see Fig. 5. The diamond shape is selected because it deforms uniformly over its entire surface which maximizes the mechanical energy transfer of each layer. Rigid frames Assembled actuator Film layers DE 2 Fig. 4: Exploded view of a 3 layers multi-layered DE actuator. Bistable Element Elastic bands DE 1 Fig. 5: Multi-layer DE actuator in OFF (left) and ON (right) positions. Fig. 3: Flip-flop bistable actuator concept [11]. In this paper, a second generation of compliant bistable actuator (CBA) powered by DE actuators is presented along with its performance. This design has been jointly developed by MIT and Cambridge University. MIT developed a new reliable multi-layered DE actuator with high specific work output with respect to traditional DE actuators. The approach used to match the bistable element to the DE actuators is also presented. Experimental results (force versus displacement) of To keep the number of layers to practical levels while increasing the actuator force capabilities, few thick layers were preferred over many thin ones. The trade-off of this selection is to ease the assembly process by lowering the number of parts at the expense of using higher voltages. The layers are manufactured from a 1.5 mm thick film made by laminating together three 0.5 mm layers of VHB 4905. The layers are then assembled inside the rigid frames and a pair of elastic bands are 2 Copyright © 2005 by ASME installed to provide a non-linear restoring force canceling the film stiffness, see Fig. 5. This DE actuator design has shown excellent performance characterized by large extensions that can exceed 100%,1 see Fig. 5. The specifications of the three layer actuator used in this study are given in Table 1. A force/displacement curve is also presented later in Fig. 9. It should be noted that such DE actuators with 100s of layers are currently feasible and this design has yet to be optimized to reduce actuator voltage and weight and improve efficiency. The diamond frame actuator has also shown good reliability. A prototype of the diamond frame actuator concept using a single active layer achieved 15,000 actuation cycles at 60% strains. In comparison, rolled actuators have been reported to show no signs of damage after 1.1 million cycles at 5% strains and to fail at about 36,000 cycles when the strains are increased to 12% [13]. Their performance at higher strains has not been documented but extrapolating from those numbers suggests that CBAs using diamond frame DE actuators are capable of maintaining robust, reliable performance at much higher strains than rolled actuators. Table 1: DE actuator properties (3 layers). Performance Metrics Values Number of Active Layers 3 Operating Voltage (each layer) 10 kV Strain 100% Force 3N Weight 20 grams Size (closed) 110×30×15 mm to the snap-through truss used in the compliant bistable actuator, Fig. 6 (b). A first approach to analyzing the critical force PEULER of a straight-membered snap-through truss, as illustrated in Fig. 6 (a) is to resolve the actuation force axially to the buckling member, and then apply the standard Euler buckling formula for a pin-ended strut: PEULER 2 EI L2 (1) in which E is the Young's modulus, and I and L are the second moment of area and the length respectively of the buckling member. This permits an initial sizing estimate to be performed, and provides a method for assessing different materials for suitability. In the preferred snap-through truss design shown in Fig. 6 (b), the curvature of the buckling member, material non-linearity and small load eccentricity caused by the construction of the living hinges must be taken into account. This is done by solving a modified elastica formulation. We assume that the hinges have negligibly small physical dimensions and exert zero moment under rotation. As the snap-through truss transitions between the stable states, the buckling members are subject to a change in the end-to-end distance L . It is necessary to relate L to the resolved force P to determine the snap-through properties of the truss. We analyze the pin-ended curved members of the compliant bistable actuator by decomposing each member into two cantilevered beams joined in the middle. This is illustrated in Fig. 7. 2.2 Bistable Mechanism The bistable elements were designed to be symmetricallybistable as neither direction of switching is preferred. The snapthrough truss shown in Fig. 6 (a) was chosen as the basis for the design [14]. It was modified to become an all-polymer compliant mechanism by replacing the hinges shown with living hinges [15]. Fig. 7: Definition of variables. (a) (b) Fig. 6: Progression from (a) a simple snap-through truss to (b) the truss used in the CBA. To provide lateral restraint to the central element, resistance to side-sway, and structural rigidity, two snapthrough trusses each consisting of two buckling members are combined. The snap-through truss is a highly scalable design which enables its size to be matched to the actuators both with their current geometry and also for future miniaturized versions. The buckling members are made initially curved to reduce the maximum force that they will carry and to smooth the snap-through response of the truss. These modifications led 1 Referring to this figure, in which is the curvature of the member, the member's end rotation, resolved force P is applied at an eccentricity a normal to the end of the member, and the subscript 0 refers to the initial configuration, we may apply the standard moment-curvature relationship EI M to the structure giving: EI 0 P y a cos (2) Fichter and Pinson have shown that Eqn. 2 may be solved to produce 2 2 sin 4r 1 1 p u 0 (3) L S 0 1 du 2 2 0 q 0 1 r u 1 p 1 du 0 1 p 2u 2 1 r 2u 2 q (4) Referring to the film strain in the short axis direction 3 Copyright © 2005 by ASME in which p sin( / 2) , q P / PEULER , pu sin( / 2) and r 2 p 2q . 2 2 0 aq cos 2 p 2 q 2L These equations may in turn be simultaneously solved numerically to relate L to the axially resolved force P which is then related to the total actuation force by resolving parallel to the central column and summing the contribution from all the buckling members [16,17]. The above analysis was used to determine the truss design that was used in the CBA. This truss requires a peak resisting force of 3N, corresponding to the maximum force the DE actuator can achieve. The final design consists of four HDPE buckling members, each having a rectangular cross section of depth 6.35 mm and thickness 2.3 mm, a distance between hinges of 60.6 mm and a uniform initial curvature of 0.0145 mm-1. A general property of the force/displacement response of an unconstrained snap-through truss is the presence of low stiffness at each extreme deformation. To overcome this, it was decided to constrain the truss by means of mechanical stops to ensure that the truss is in a higher-stiffness configuration at the start of the actuation. The truss actuation force response was verified experimentally by means of displacement controlled quasistatic tests. In Fig. 8 (a), a full cycle is shown for an unconstrained truss (the mechanical stops shown by dotted lines in the figure were not present, but facilitate comparison with Fig. 8 (b). It can be seen that the peak resisting force of the truss is 3.5 N (slightly higher than analytically predicted) which is greater than the DE actuator can achieve. However, it turns out that due to the relaxation properties of HDPE, this peak resisting force becomes lower and the truss may be successfully incorporated into the CBA. It can be seen that over the transition, which was slow due to the quasi-static nature of the test, the profile (originally anti-symmetric about the zero displacement point) is foreshortened. When the truss is held at zero load, however, it recovers to the expected displacement. In a faster cycle, the amount of creep-recovery required would be smaller. This means that for this particular truss fabricated from HDPE, sufficient time must be left between transitions to ensure that the expected force is being achieved. The truss was then held by a mechanical stop at the displacement shown in the figure for 12 hours before a second quasi-static response test was carried out. This led to the response labeled ‘A’ in Fig. 8 (b). It can be seen that the peak resisting force has reduced from 3.5 N to 1.7 N. Only half of the cycle is shown for clarity. Following a number of additional cycles, and a period of 4 months being held at load, the response labeled ‘B’ was measured. It can be seen that these curves represent a steady state response – there is minimal difference between the two response curves. It can also be seen that the effect of the truss being constrained over a period of time is not only to reduce the peak resisting force but also to foreshorten the sinusoidal profile further. This may be overcome in future designs by using a low-creep plastic or by using composite material. The steady-state response shown in Fig. 8 (b) is used to predict the compliant bistable actuator performance as the effects of creep are not accounted for by the analysis. a) Truss quasi-static response immediately after assembly b) Truss response after being held by mechanical stops for 12 hours (A) and 4 months (B). Fig. 8: Quasi-static displacement-controlled truss response curves. 2.3 Actuator/ Truss Combination The compliant bistable actuator performance is obtained by adding the experimentally-determined truss response to the measured actuator force/displacement response, see Fig. 9. In order to add the truss response, it is necessary to switch the sign of the response shown in Fig. 8 (b). The result is the predicted force output of the complete compliant bistable actuator system. 2.4 Integrated Compliant Bistable Actuator The packaging of the bistable truss and DE actuators must satisfy a number of functions, mainly: provide lateral restraint to the truss, provide a rigid base for the actuators and, most importantly, be compact. The design must also be easy to construct and assemble. The assembly of the complete unit is shown in Fig. 10. As shown in the figure, the volume is minimized by placing the DE actuators on each side of the bistable truss, where the two actuator motions will not conflict. Parts were minimized, e.g. the actuators were given secondary roles as mechanical stops. The casing pieces were CNC-milled 4 Copyright © 2005 by ASME from Plexiglass sheet and glued with cyano-acrylate adhesive to form two pieces, simulating a possible molding, which, like the truss, can be easily scaled in the future. The compliant bistable actuator weight can be reduced in at least three ways. First, a packaging concept using a single DE actuator is currently under development, which will reduce the mass by almost 50%. Second, the DE actuators’ specific work output can further be increased, for example by adding more active layers. Third, all components such as the bistable truss can be optimized to reduce weight. Bistable Truss 25 mm DE 2 Fig. 9: Predicted CBA performance. DE 1 Casing Bistable Truss Casing Fig. 11: CBA during extension. DE Actuators Fig. 10: Exploded view of a CBA. 3 Results and discussion 3.1 Prototype Performance The resulting compliant bistable actuator prototype is shown in Fig. 11 (along with a US quarter for size comparison). Here, the compliant bistable actuator is at the end of the extension stroke where the bottom DE actuator is seen pushing against the bistable truss. The performance specifications of the prototype were measured experimentally and are summarized in Table 2. The forces reported in Table 2 are relatively low because the DE actuators only consisted of three active layers. The forces could be significantly increased (×10) through multilayering. Such a device could already be used in applications not dependent on actuator weight such as locking mechanisms e.g. automotive door locks. However, Table 2 indicates that the parameters involving weight (such as specific work output and force-to-weight ratio) must be improved before the prototype can be used in applications where weight is critical, i.e. when the device must lift itself. Fortunately, there is much room for improvement because the specific work output of the prototype is four orders of magnitude lower than the specific energy of the elastomer film which is around 3 J/g [4]. Table 2: CBA specifications. Performance Metrics Displacement Strain (based on 81mm length) Force (min/max) Weight Force-to-weight Specific work output Switching time Size (closed) Values 25 mm 30% 1 – 3.5 N 220 grams 0.46 1.14×10-4 J/g 10 s 135×81×48 mm 3.2 Predictions vs. Experiments The quasi-static experimental response of the compliant bistable actuator assembly is compared against analytical predictions, in which the response is assumed to be the superposition of the quasi-static responses of the bistable truss and the DE actuator, in Fig. 12. The experimental data was obtained by attaching the CBA prototype to the platens of a tensile testing machine. With the CBA in one stable state, the tensile machine moved to the other state at a constant velocity of 2.5 mm/s as soon as the driving actuator was turned on. The force applied by the CBA was recorded during the motion. The voltage was turned on a few seconds before the start of the test so the initial force spike is not visible on the experimental data. The quasi-static prediction is in good agreement with the experimental results. In particular, the first and second turning points of the analytical and experimental curves are in close correlation. Discrepancies occur principally at the transition where the actuator stops and all the work is carried out by the bistable truss itself. This is a consequence of the manual actuator control that was used in the test. The actuator was kept turned on beyond the transition point set at 18 mm until the end of the motion at about 25 mm. The transition at 18 mm was set as a conservative design value and is not an actuator limit. 5 Copyright © 2005 by ASME 4 Conclusion Fig. 12: CBA performance versus prediction. There is a good match between prediction and experiment because the velocity (or strain rate) was kept identical during the acquisition of actuator design data (Fig. 9), and the measurement of the compliant bistable actuator performance (Fig. 12). DE actuators have a strongly viscoelastic nature and are significantly affected by test velocity. For example, if the DE actuators are displaced more slowly than they would if unconstrained, viscoelastic relaxation causes the output force to become higher. Vogan, J., Wingert, et al., “Manipulation in MRI Devices Using Electrostrictive Polymer Actuators: with an application to Reconfigurable Imaging Coils” 2004 IEEE International Conference on Robotics and Automation (ICRA 2004), New Orleans, Louisiana, 2004 1 Kornbluh R., Pelrine R., et al., “Electroelastomers: Applications of Dielectric Elastomer Transducers for Actuation, Generation and Smart Structures,” Smart Structures and Materials 2002: EAPAD, Yoseph Bar-Cohen, Editor, Proceedings of SPIE, 4695, 2002 2 Hanson, D., White, V., “Converging the Capabilities of EAP Artificial Muscles and the Requirements of Bio-Inspired Robotics,” Smart Structures and Materials 2004: EAPAD, Yoseph Bar-Cohen, Editor, Proceedings of SPIE, 5385, pp. 29-40, 2004 3 Kornbluh R., Pelrine R., et al., “Electroactive Polymers: An Emerging Technology for MEMS,” MEMS/MOEMS Components and Their Applications 2004, Siegfried W. Janson, Editor, Proceedings of SPIE, 5344, 2004 4 Plante, J.S., Vogan, J., et al., “An Analytical and Experimental Study of Failure Modes of Dielectric Elastomer Actuators,” Submitted to ASME Journal of Applied Mechanics, 2005 5 Wingert A., “Development of a Polymer-Actuated Binary Manipulator,” M.S. Thesis, Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, 2002 6 Chirikjian, G., J. Burdick, J., “Hyper-Redundant Robotic Mechanisms and Their Applications,” IEEE/RSJ International Workshop on Intelligent Robots and Systems, Osaka, Japan, 1991 7 Sujan, V., Lichter, M., Dubowsky, S., “Lightweight Hyper-redundant Binary Elements for Planetary Exploration Robots,” Proc. 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM '01) 811, Como, Italy, July 2001 8 This paper reports on the development of a second generation of all-polymer compliant bistable actuator using dielectric elastomer actuators. The device uses the flip-flop concept in which two antagonistic actuators move a bistable element. The DE actuators used three active elastomer layers to demonstrate the feasibility of the multi-layering approach. A bistable truss was optimized to work with newly developed, high specific work output, actuators. The physical result of this study is a functional prototype capable of deploying at least 1 N over 25 mm in both directions in about 10 seconds with a non-optimized mass of 220 grams. This first generation of compliant bistable actuators is already appropriate for applications where weight is not critical. More work is required to further improve the specific work output and force-to-weight ratio for weight critical applications. Also, bistable trusses that do not creep still need to be developed. ACKNOWLEDGMENTS The authors would like to acknowledge the contribution of T. Schioler to the work presented in this paper, particularly in the analysis of snap-through trusses. This research was funded by the Cambridge-MIT Institute (CMI). REFERENCES 2002 IEEE International Conference on Robotics and Automation (ICRA 02), Washington DC, May 2002 Santer, M.J., Pellegrino, S., “Asymmetrically-bistable Monolithic Energy-storing Structures,” 45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, AIAA 2004-1527, 2004 10 Vogan J., “Development of Dielectric Elastomer Actuators for MRI Devices,” M.S. Thesis, Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, 2004 11 Plante, J.S., Liberatore, S., Vogan, J., Dubowsky, S., “On the Design of Dielectric Elastomer Actuators,” journal paper in preparation, 2005 12 13 Pei, Q., Pelrine, R., Stanford, S., Kornbluh, R., Rosenthal, M., Meijer, K., Full, R., “Multifunctional electroelastomer rolls and their application for biomimetic walking robots,” in Smart Structures and Materials 2002: Electroactive Polymer Actuators and Devices, Yoseph Bar-Cohen, Editor, Proceedings of SPIE vol. 4698, March 2002 Schioler, T., Pellegrino, S., “Multi-Configuration Space Frames,” 45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, AIAA 2004-1529 , 2004 14 Howell, L.L., “Compliant Mechanisms”, John Wiley \& Sons Inc., New York, 2001 15 Fichter, W.B., Pinson, M.W., “Load-shortening behaviour of an initially curved eccentrically loaded column,” NASA Technical Memorandum 101643, 1989 16 17 Schioler, T. "Multi-stable Structural Elements" Dissertation submitted for the degree of Doctor of Philosophy, University of Cambridge, 2005. Lichter, M.D., Sujan, V.A., Dubowsky, S., “Computational Issues in the Planning and Kinematics of Binary Robots,” Proceedings of the 9 6 Copyright © 2005 by ASME