full_text
advertisement

Binary Classification Trees for Multi-class Classification Problems
Jin-Seon Lee* and Il-Seok Oh**
*
Department of Computer Engineering, Woosuk University, Korea
**
Department of Computer Science, Chonbuk National University, Korea
jslee@woosuk.ac.kr, isoh@moak.chonbuk.ac.kr
Abstract
This paper proposes a binary classification tree aiming at
solving multi-class classification problems using binary
classifiers. The tree design is achieved in a way that a
class group is partitioned into two distinct subgroups at a
node. The node adopts the class-modular scheme to
improve the binary classification capability. The
partitioning is formulated as an optimization problem and
a genetic algorithm is proposed to solve the optimization
problem. The binary classification tree is compared to the
conventional methods in terms of classification accuracy
and timing efficiency. Experiments were performed with
numeral recognition and touching-numeral pair
recognition.
1. Introduction
The pattern recognition problems involve the small-set
classifications like numeral or English alphabet
recognitions and the large-set classifications with
hundreds or thousands of classes such as touchingnumeral pair, Korean character, and Chinese character
recognitions. These multi-class classifications can be
solved using a set of binary classifiers [1].
This paper deals with designing a multi-class classifier
using a collection of binary classifiers. Firstly we should
have a method to decompose the original multi-class
classification into a set of binary classification subproblems. We mention on two conventional approaches:
class-pairwise and class-modular schemes.
Another approach can be found in the tree-structured
classifications [Chapter 8, 1]. The CART splits the
training samples into two groups at a node, and applies the
same process recursively to two children [2]. Perrone used
the confusion matrix to find out the best class partition [3].
Chae et al. used the linear decision function at a node to
partition the training samples. They designed the trees
using a genetic algorithm [4].
In this paper, a new binary classification tree (BCT) is
proposed. In our BCT, the tree design is achieved in a
way that a class group is partitioned into two distinct
subgroups at a node. The node has a binary classifier that
assigns a sample pattern to one of two class subsets. To
gain a higher accuracy, the class-modular scheme is
adopted for implementing the binary classification at a
node. An optimization problem is formulated in order to
search for the best partition, i.e. the one showing the
largest separability. A genetic algorithm that searches for
the best partition will be presented. The same process is
applied to each of the two children recursively until a leaf
node with only one class is reached.
Our BCT method is compared to the conventional
methods in terms of classification accuracy and timing
efficiency. Experiments were performed with numeral
recognition and touching numeral pair recognition. A
promising preliminary result was obtained.
2. Class-decomposed Classifications
Assume there are K classes and k-th class is denoted
by ωk. X represents a feature vector of a sample to be
recognized.
2.1 Class-pairwise scheme
This method constructs a binary classifier for each of
the class pairs. So totally KC2 binary classifiers are needed
to solve K-class classification problems. For example, 45
binary classifiers are made for the numeral recognition.
When K is large, the number of binary classifiers is large
and this method is unpractical. The decision rules are as
follow. The dij is a binary classifier that discriminates the
classes ωi and ωj.
dij(X) = 1 if Xωi, 0 if Xωj
pi(X) = j=1,K and ji dij(X)
Classify X into ωk if k = argmaxi=1,K pi(X)
2.2 Class-modular scheme
This method decomposes the K-class classification
problem into K binary classification sub-problems. A
binary classifier for the class ωi discriminates ωi from the
remaining K-1 classes, {ωj | j=1,K and ji}. So totally K
binary classifiers are required. For the numerals, 10 binary
classifiers are made and for a large-set classification
problem this method is not unpractical. The decision rules
are as follow. The di is a binary classifier for the class ωi.
di(X) = 1 if Xωi, 0 if X{ωj| j=1,K and ji}
Classify X into ωk if k = argmax i=1,K di(X)
3. Binary Classification Trees
This section proposes the binary classification tree
(BCT) as a multi-class classification method using binary
classifiers. An internal node has a class set and also a
binary classifier that discriminates a sample pattern into
one of two class subsets. A leaf node has only one class.
3.1 Structures
The root node is allocated the original class set,
S={ω1, ω2,… ωK}. In the node, S is partitioned into two
class subsets, Sleft and Sright where Sleft, Sright and
S=SleftSright. The Sleft is given to the left child and the
Sright to the right child. This process is applied to each of
the left and right children recursively. When the class set
has only one class, the node becomes a leaf node and the
recursive process terminates.
If the following condition with b=1 is adopted in the
BCT design process, a balanced tree is resulted in. When
no condition is used, a skewed tree is likely to be
generated.
abs(|Sleft|–|Sright|)b where|.| represents the set size ---- (1)
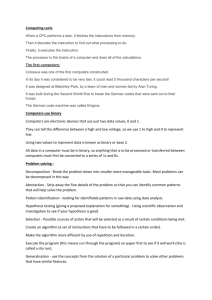
Figure 1 shows a BCT for the numeral recognition
problem (K=10). The numbers of leaf and internal nodes
are K and K-1, respectively [5]. Since only the internal
node has a binary classifier, K-1 binary classifiers are
made.
(a) Balanced BCT
(b) Skewed BCT
Figure 1. An example BCT (K=10 for numerals).
In the above design process, the most important
problem is to search for the best partition in the internal
nodes. In searching for the best partition, the search space
grows exponentially as S becomes large. So we should
develop a sub-optimal algorithm that is computationally
practical and guarantees a solution near the optimum
point.
The above problem of partitioning the class set is
similar to the feature selection problem. The searching
process needs an objective function that evaluates a
partition. Our objective function can be formulated in
terms of the separability, i.e. how well the two class
subsets are discriminated in the feature space. At the
internal nodes near the root, the confusing class pairs are
enforced to be put into the same class subsets. The
discrimination of the confusing pairs is delayed and the
task is given to the nodes near the leaf node. This strategy
is adopted since the nodes near the root should deal with a
larger number of classes than ones near the leaf.
The measurement of the separability can be done in
the wrapper or filter approaches [6]. In the wrapper
approach, specific classifier and database are used to
evaluate the partition. The actual recognition rates or the
confusion matrices can be used. In the filter approach, a
statistic is used like the measurement of overlapping of the
training samples of Sleft and Sright in the feature space. Let
us denote the separability function by J(Sleft, Sright).
3.2 Binary classification at nodes
Each internal node should implement a binary
classifier that classifies a sample X into Sleft or Sright. The
performance of the binary classifiers at the internal nodes
directly influences the final performance of the BCT.
One simple rule follows. It constructs one binary
classifier d(X) at a node.
Rule 1:
Training:
For X from class ωi,
if(ωiSleft) d(X)=0, otherwise d(X)=1.
Recognition:
For X,
if(d(X)0.5) move X to the left,
otherwise move X to the right.
Another rule adopts the class-modular scheme as
shown below. It constructs |S| binary classifiers where |S|
represents the number of classes in S.
Rule 2:
Training:
For X from class ωi,
di(X)=1, dj(X)=0 for j=1,K and ji.
Recognition:
For X,
k = argmax i=1,K di(X)
if(wkSleft) move X to the left,
otherwise move X to the right.
3.3 Genetic algorithm for optimal partitions
The GA is a stochastic algorithm that mimics the
natural evolution. The most distinct aspect of the
algorithm is that it maintains a set of solutions (called
individuals or chromosomes) in a population. Like the
biological evolution, it has a mechanism of selecting fitter
chromosomes at each generation. To simulate the
evolution, the selected chromosomes undergo genetic
operations such as the crossover and mutation.
The steady-state procedure is described below.
Detailed specification of our GA follows. The algorithm
was designed relying on the feature selection algorithm
proposed in [7].
steady_state_GA() {
initialize population P;
repeat {
select two parents p1 and p2 from P;
offspring = crossover(p1,p2);
mutation(offspring);
replace(P, offspring);
} until (stopping condition);
}
A string with K binary digits is used where K
represents the number of classes in S. A binary digit
represents a class; values 0 and 1 mean the membership of
Sleft and Sright, respectively. As an example, chromosome
01101001 means a partition of Sleft = {ω1,ω4,ω6,ω7} and
Sright = {ω2,ω3,ω5,ω8}. The generation of initial population
is straightforward. For each gene, if a random floating
number within [0,1] is less than 0.5, the gene is set to be
0. Otherwise the gene is set to be 1.
The fitness of a chromosome is evaluated by the
separability function J(Sleft, Sright). The chromosome
selection for the next generation is done on the basis of
the fitness. The selection mechanism should ensure that
fitter chromosomes have higher probability of survival.
Our design adopts the rank-based roulette-wheel selection
scheme. The chromosomes in population are sorted nonincreasingly in terms of fitness, and the i-th chromosome
is assigned the probability of selection by a nonlinear
function, P(i) = q(1-q)i-1. A larger value of q enforces
evidently a stronger selection pressure. The actual
selection is done using the roulette wheel procedure.
We use the standard crossover and mutation operators
with a slight modification. An m-point crossover operator
is used which chooses m cutting points at random and
alternately copies each segment out of the two parents.
The crossover may result in offspring that break the
balance requirement because the exchanged gene
segments may have different numbers of 1. The mutation
is applied to the offspring by converting 0-bit to 1–bit or
1-bit to 0-bit with the mutation probability pm. After
mutation, some bits are chosen randomly and converted to
make the chromosome satisfy the tree balancing condition
in (1). This gives further the mutation effect.
If the mutated chromosome is superior to both parents,
it replaces the similar parent; if it is inbetween the two
parents, it replaces the inferior parent; otherwise, the most
inferior chromosome in the population is replaced. The
GA stops when the number of generations reaches the
preset maximum generation T.
No systematic parameter optimization process has
been attempted, but the following parameter set was used
in our experiments: 20 for the population size, 0.1 for the
mutation rate (pm), and 0.25 for q in rank-based selection.
3.4 Exhaustive and sequential search algorithms
each internal node. We prepare the training set by
removing the samples that do not belong to S.
4.2 Recognition
The following two algorithms are designed by
modifying the feature selection algorithms in [8].
(1) Exhaustive search
Every possible partition is generated and evaluated,
and the best partition is chosen as the solution. This
algorithm guarantees the optimal solution. However, the
search space size is O(2K), so this algorithm is unpractical
for the large K.
(2) Sequential search algorithms
These algorithms are very similar to SFS, PTA, and
SFFS algorithms for the feature selection. The following
is a SFS-like algorithm.
Sleft=; Sright=S; max=-1;
while(! Sright) {
k=argmax ωjSright J(Sleftωj, Sright-ωj);
Sleft=Sleftωk; Sright=Sright-ωk;
if(J(Sleft, Sright)>max) {
max = J(Sleft, Sright);
store Sleft and Sright as new optimum;
}
}
return(optimal Sleft and Sright);
4. Training and Recognition
4.1 Training
When we use the Rule 1 in Section 3.2, the training of
a BCT is straightforward. The internal nodes have their
own binary classifiers that are to be trained independently
of other nodes. What we should do is to prepare the
training set by re-organizing the samples in the original
training set into two groups, one for Sleft and the other for
Sright. In our implementation, we use the binary MLP
(Multiple-Layer Perceptron) proposed in [9]. The backpropagation learning algorithm is used to train the binary
MLP classifiers. The expected outputs for the samples in
Sleft and Sright are set to 0 and 1, respectively.
If the Rule 2 is used to implement the node classifiers,
a class-modular classifier is constructed and trained at
In the recognition phase, the root node of BCT
receives the input pattern and attempts to classify the
pattern by using its binary classifier. The pattern moves to
one of the left or right child nodes according to the
classification result.
Let us first introduce the recognition method for the
BCT designed with Rule 1. Assuming d to be the output
of the binary classifier and to be between 0 and 1, the
sample moves to the left child node if the value of d
satisfies the condition 0d0.5. Otherwise the sample
moves to the right child node. This process is applied
recursively. When the sample reaches to the leaf node, the
recognition process terminates by reporting the class label
in the leaf node. We can allow the rejection by adjusting
the rejection parameter α defined in the decision space as
in Figure 2.
Sleft
Sright
reject
α
α
Figure 2. Rejection parameter in decision space.
If we design the BCT using the Rule 2, another
recognition method should be used. Following the Rule 2,
the sample moves left or right at internal nodes. When the
sample reaches to the leaf node, the recognizer reports the
class label in the leaf node.
4.3 Timing analysis of recognition
The timing efficiency of the recognition stage is
measured in terms of the number of binary classifiers to
be executed. The best case arises when the BCT is well
balanced, i.e. when every internal node satisfies the
condition in (1) with b=1. In this case, the depth of BCT is
not greater than ceil(log2K) and the number of binary
classifiers for the balanced BCT using the Rule 1 is the
same as the tree depth. The worst case is when every
partition is such that |Sleft|=1 and |Sright|=|S|-1. The tree is
skewed and the maximum number of binary classifiers is
K-1. For the balanced BCT using the Rule 2, the number
of binary classifiers is about double of K. Table 1
compares those numbers with the ones for class-modular
and class-modular.
Table 1. Comparison of timing efficiency (unit: number of
binary classifiers)
Numerals
(K=10)
Balanced BCT with Rule 1
4
Balanced BCT with Rule 2
20
Class-modular
10
Class-pairwise
45
Touching numeral pairs
(K=100)
7
200
100
4950
5. Experiments
Two different character sets, numerals (K=10) and
touching-numeral pairs (K=100), were chosen for the
experiments. For the numerals, CENPARMI database was
used. For the touching-numeral pairs, the database in [10]
was chosen.
For training the binary MLP, we used the error backpropagation algorithm. A constant learning rate, 0.2, was
used. The input samples are fed after shuffling their order
at every epoch. The initial weight values are obtained by
generating random numbers ranging from -0.5 to +0.5.
The number of hidden nodes was 4.
Table 2 compares the recognition performances of
BCT and class-modular for the numeral and touchingnumeral pair recognitions. The rejection was not allowed
and the recognition rates are for the test sets. The BCT
using the Rule 1 is inferior to the class-modular by 1.25%
for the numerals. However the BCT using the Rule 2 is
superior to class-modular by 0.45%. For the recognition
time, BCT with the Rule 1 is more than two times faster
than class-modular. On the contrary, BCT with the Rule 2
is about two times slower than class-modular.
The TNP recognition is regarded as a large-set
classification problem. For the problem, BCT using the
Rule 2 produced a superior result to the class-modular. It
improves the rate by about 1%. Like the numerals, BCT
using the Rule 1 is inferior to class-modular. For timing
efficiency, BCT with the Rule 1 is dramatically faster than
the others. The BCT with the Rule 2 used about twice the
computation time of class-modular as the analysis in
Table 1.
Table 2. Recognition performance of BCT and classmodular (no rejection)
BCT
Classmodular
Rule 1
Rule 2
Numerals
96.05% 97.75%
97.30%
TNP
72.93%
76.36%
75.47%
6. Concluding Remarks
The binary classification tree was proposed and some
experimental results using the character recognition
problems including the large-set classification were
presented. The recognition accuracies were improved by
the BCT using the Rule 2. The BCT consumed about
twice the computation time of the class-modular.
Our future works are focused on improving the
classification accuracy of the BCT. Several approaches
are under considerations. Currently the BCT design uses a
local optimization. A global optimization method that
searches simultaneously the partitions of the parent and
children would improve the performance. Another
improvement can be made by using the class-dependent
feature sets and classifiers. In this framework, some nodes
may use MLP while others use SVM. And each node
designs its own feature set that provides the best
classification.
7. References
[1]
R.O. Duda, P.E. Hart, and D.G. Stork, Pattern
Classification, 2nd Ed., Wiley-interscience, 2001.
[2] L. Breiman, J.H. Friedman, R.A. Olshen, and C.J. Stone,
Classification and Regression Trees, Chapman & Hall/CRC,
1984.
[3] M.P. Perrone, “A soft-competitive splitting rule for adaptive
tree-structured neural networks,” Proc. of IEEE
International Joint Conf. on Neural Networks, pp.689-693,
1992.
[4] B.-B. Chae, T. Huang, X. Zhuang, Y. Zhao, J. Sklansky,
“Piecewise linear classifiers using binary tree structure and
genetic algorithm,” Pattern Recognition, Vol.29, No.11,
pp.1905-1917, 1996.
[5] E. Horowitz, S. Sahni, and D. Mehta, Fundamentals of Data
Structures in C++, Computer Science Press, 1995.
[6] P. Langley, “Selection of relevant features in machine
learning,” Proc. of AAAI Fall Symposium on Relevance,
pp.1-5, 1994.
[7] I.-S. Oh, J.-S. Lee, and B.-R. Moon, “Hybrid genetic
algorithms for feature selection,” IEEE Tr. on PAMI,
(submitted).
[8] J. Kittler, "Feature selection and extraction," in Handbook of
Pattern Recognition and Image Processing, Academic Press
(Edited by T.Y. Young and K.S. Fu), pp.59-83, 1986.
[9] I.-S. Oh and C.Y. Suen, “A class-modular feedforward
neural network for handwriting recognition,” Pattern
Recognition, Vol.35, pp.229-244, 2002.
[10] S.-M. Choi, “Segmentation-free recognition of handwritten
numeral strings using neural networks,” Ph.D. thesis,
Chonbuk National University, 2000 (in Korean).