09_CherSoonPeng
advertisement

SIM UNIVERSITY
SCHOOL OF SCIENCE AND TECHNOLOGY
DESIGN A SYSTEM TO RECOMMEND
ENVIRONMENTAL WEATHER CONDITION FOR A
NEW TOWN
STUDENT
: CHER SOON PENG
(PI NO. H0605379)
SUPERVISOR
: MR NAVA SELVARATNAM
PROJECT CODE : JAN09/BEHE/02
A project report submitted to SIM University
in partial fulfilment of the requirements for the degree of
Bachelor of Engineering
NOV 2009
TABLE OF CONTENT
Abstract
i
Statement of Assistance
i
List of Abbreviation
ii
List of Figure
iii
Chapter 1.
Chapter 2.
Introduction
Literature Research
2.1
Why does 4D VAR beat 3D VAR
2.2
Euler Lagrange equation
2.3
The Operational Mesogamma-Scale Analysis and Forecast
System of the U.S Army Test and Evaluation Command
2.4
Dew point Temperature Prediction
2.5
Overview of Artificial Neural Network
Chapter 3. Objectives
3.1
Objectives of Project
3.2
Main Technique Used
Chapter 4. Project Management
4.1
Gantt Chart
Chapter 5. Design of project
5.1
Introduction of Climate model
5.2
Description on the type of Climate model adopted
5.3
Type of software used
5.4
Description of the Program
Chapter 6. Experimentation of Program
6.1
Type of test conducted
Chapter 7. Results
7.1
Model 1
7.2
Model 2
Chapter 8. Conclusion
8.1
Achievements
8.2
Challenges Faced
Chapter 9. Recommendation for further improvement
Chapter 10. Critical Review and Reflections
1-3
4-6
7-8
9-10
11-13
14-16
17
17
18-19
20
20-21
22
22
23-24
25-26
27
28
28
29
30
References
R-1
Appendix 1. Hourly Average Air Temperature for Wilma, Florida from 28
September to 7 September
A-1 – A-5
Appendix 2. MATLAB Program
A-6
Abstract
Human activities are closely affected by the environmental weather condition surrounding
them whether in war conflict environment or in sports arena, weather condition is an
important aspect to be considered to determine the degree of success. In extreme cases, it
may poise as a health hazard to some. Extreme weather such as drought, typhoon and flood
destroyed properties and caused death to human lives. Some of this weather condition can be
predicted and necessary preventive action can be taken to mitigate the losses to the economy
and most importantly the lives of human being. In this project, a Neural Network will be
created using MATLAB software to predict the average hourly air temperature of Wilma,
Florida.
Statement of Assistance
Special thanks to my project supervisor, Mr Nava Selvaratnam who provide me with clear
and concise explanation whenever I am in doubts and make this capstone project a successful
one. Western Regional Climate Centre, who provides me with the necessary data for studies
and used in this capstone project.
i
List of Abbreviation
Page
4DWX
MRF
3D VAR
FGAT
MEP
ANN
EBP
MATLAB
Four Dimensional Weather
Medium- Range Forecast
3 Dimensional Variation scheme
First Guess at Appropriate Time
Maximum Entropy Production
Artificial Neural Network
Error Back Propagation
Matrix Laboratory
2, 9, 10
3
4
4
7
11-16, 21, 22
11
17, 22, 28
ii
List of Figure
Figure 1.
Figure 2.
Figure 3.
Figure 4.
Figure 5.
Figure 6.
Figure 7.
Figure 8.
Network architecture of Neural Network with 30 hidden layers
Network architecture of Neural Network with 60 hidden layers
Predicted Average Air Temperature from 28 September to 7 October
Observed Average Air Temperature from 28 September to 7 October
Predicted / Observed Average Air Temperature from 28 September to 7
October for Model 1
Error margin between Predicted and Observed average air temperature for
Model 1
Predicted / Observed Average Air Temperature from 28 September to 7
October for Model 2
Error margin between Predicted and Observed average air temperature for
Model 2
iii
Chapter 1. Introduction
Weathers play an important role in human daily lives. Therefore meteorologists have been in
existence since 350 BC. Since then, instruments were invented to collect information so as to
enable meteorologist to forecast weather more accurately. From primitive rain gauge,
anemometer and barometer to remote sensing equipment such as radar, lidar and satellite
which have higher accuracy in collecting data. Future technology for public weather service
is in radar remote sensing arena. The next generation radar system, the dual polarisation
radar, phased array radar provide opportunity to improve severe weather detection, rainfall
estimates and winter weather warnings and increase the lead time for severe weather hazards.
With technology improving, meteorologist makes use of climate models and computer to
process information and forecast the weather.
Climate Model is a mathematical simulation of the processes that affect the atmosphere and
produce local weather and the climate over large region. The first Climate Model was
developed in late 1960s by National Oceanic and Atmospheric Administration’s Geophysical
Fluid Dynamics Laboratory in Princeton, New Jersey. The development of this first climate
model was based on Geophysical Fluid Dynamics Laboratory founder Joseph Smagorinsky’s
belief that only a completely new approach to scientific endeavour that departed from the
independent, individual mode of inquiry would produce answers to extremely complex
problems. The first model developed was a combination of oceanic and atmospheric
processes. It allows scientists to understand how ocean and atmosphere interact with each
other to influence climate. The model also predicted how changes in the natural factors that
control climate such as ocean and atmospheric currents and temperature could lead to climate
change.
Soon, more Climate model was developed by meteorologist such as the simplest 1 Dimension
Variation model using Euler Lagrange equation which is based on maximum entropy
production hypothesis. This model calculates latitudinal distribution of the long emitted long
wave radiation and meridional heat transport for a given latitudinal distribution of the
absorbed solar radiation. In the earth usual climate system, the absorbed solar radiation
dominates the emitted long wave radiation at low latitude but long wave radiation dominates
at high latitudes. The emitted long wave radiative energy and absorbed solar radiation energy
are balanced globally and integration of the net radiative flux at the top of the atmosphere
from the South Pole to each latitude provides the required northward heat transport. These are
basic and important characteristics of the earth’s climate system but not sufficient to
determine the climate state. A simple model based on Maximum Entropy Production
principle can calculate meridional distribution of the surface temperature and clouds amount,
without treating detailed physical processes, for given distributions of the insolation and
surface albedo. By treating the problem analytically, an Euler Lagrange equation and a
numerical method solving it are obtained.
For latitudinal distributions of the absorbed solar radiation and emitted long wave radiation,
the notation I(θ) and O(θ) are used respectively, as functions of the latitude θ.
1
The integration of the net radiation of the net radiative flux, provides a measure of northward
heat transport and the integration provides an entropy production rate associated with the
above heat transport, where a is the earth radius, T(θ) is an equivalent temperature related to
by the equation. σ is the Stefan-Boltzmann constant.
We can assume that I(θ) is a given function and try to obtain an appropriate distribution of
O(θ) for such an I(θ). A function J denoting the energy flux as
Where µ is the sine of the latitude (µ=sin θ).
The Euler Lagrange equation for a variation problem with a functional
K[y]=∫F(y’(x), y(x), x)dx is given by
We obtain the Euler Lagrange equation of this problem as
The general form of ad joint equation is
Where λ is the ad joint variable,
is the adjoint operator of the linearization of f and g
is the distribution function of a cost function.
Another type of Climate model developed was Chemical Transport model which was a three
dimensional model that uses observed or analysed wind, moisture, temperature and other
meteorological conditions to calculate the transport of chemical substances through the
atmosphere and reactions among them as a function of time. Chemical Transport model
includes the processes by which chemical species are converted to aerosols and by which
they are incorporated into rain and washed to the ground. The model is used to compute the
way the distribution of aerosols varies between place and time.
The recent collaborated development by the United States Army Test and Evaluation
Command is a completely new meteorological support infrastructure called the Four
Dimensional Weather (4DWX) system. The 4DWX modelling system is currently based on
the fifth generation Pennsylvania State University National Centre for Atmospheric Research
Mesoscale Model (MM5). The model has non-hydrostatic dynamics, a two way interactive
nesting procedure with coarse grids that provide boundary conditions for fine grids running at
smaller time steps and with feedback from fine grids to coarse grids, and a radiative upper
boundary condition that mitigates noise resulting from the reflection of vertically propagating
waves. It also has timed-dependent lateral-boundary conditions, relaxed towards large scale
model forecast. A nudging zone of five rows and columns is specified at the model lateral
2
boundaries, with a nudging weight that allows the model variable tendencies to relax
gradually to the larger scale model forecasts along the boundary. The model uses the
modified Medium- Range Forecast (MRF) model boundary layer parameterization. The MRF
parameterization is a non local mixing scheme. The Richardson number is used to determine
the depth of the boundary layer. Clouds effects on radiation are allowed for shortwave
radiation, and the Rapid Radiative Transfer Model is used for long wave radiation. The
“Noah” land model with four soil layers is used. Soil moisture and soil temperature are
predicted at each grid point based on substrate and atmospheric properties. The model has a
land surface data assimilation system that diagnoses current substrate moisture and
temperature using in situ and remotely sensed data. The model has 36 computational levels,
with approximately 12 levels within the lowest 1km.
Newtonian relaxation method was used as data assimilation. Data assimilation by Newtonian
relaxation is accomplished by adding non-physical nudging terms model predictive equation.
These terms for model solution are each grids point to observation or analyses of
observations, in proportion to the difference between the model solution and the data or
analysis. This approach was used because it is relatively efficient computationally, it is robust
and allows the model to ingest data continuously rather than intermittently, the full model
dynamics are part of the assimilation system so that analyses contain all locally forced
mesoscales features, and it does not unduly complicated the structure of the model code. The
implementation of Newtonian relaxation in the 4DWX system forces the model solution
towards observations rather than toward analyses of the data. This approach was chosen
because observations on the mesoscale are sometimes sparse and typically are not very
uniformly distributed in space, making objective analysis difficult. With station nudging,
each observation is ingested into the model at its observed time and location, with proper
space and time weights, and the model spreads the information in time and space according to
the model dynamics.
Word Count: 1206
3
Chapter 2. Literature Review
2.1 Why does 4D VAR beat 3D VAR?
3D VAR (3 Dimensional Variation scheme) was introduce into operational
global numerical weather prediction (NWP) in 1999. Completion of the
Perturbation Forecast model and its ad joint and availability at additional
computer power enabled operational global 4D VAR in 2004. A Series of
experiments were designed to find out what aspects of 4D-VAR caused the
improvement over 3D-VAR. In particular the experiments are designed to
distinguish two possible causes: allowance for the actual time of each
observation and the use of time evolved co variances to provide some flow
dependent structures [1].
4 variation assimilation schemes were used in the experiment. They are basic
3D VAR, 3-D VAR with FGAT (First Guess at Appropriate Time), 4D VAR
and basic 4D VAR. VAR is the incremental variational minimisation.
In basic 3D VAR scheme, all observation in the time window T-3 to T+3
(where T is the analysis time) are treated as if they were at T+0 which is close
to their average time. Incremental variation minimisation searches for the
lower-resolution increment which, when added to the full model predictions,
minimizes a penalty measuring the deviations from the observations and from
the background state at T+0. The analysed increment is initialised by running
both backwards and forwards with PF model, combining the results using a
digital filter before reconfiguring to the resolution of the full model, and then
is added to the background at T+0 to create an analysis. This is used to start a
6-hour forecast and provide the fields at T+6 needed for the next cycle.
3D VAR scheme with FGAT is created by exploiting the increment al
formulation to provide the full model input to the estimate of the observations
at the actual time of observation. The full model state is saved at regular
intervals hourly and these are then interpolated to the actual time and position
of each observation. Only the deviations between the full model predictions
and the observations are treated as if they were at T+0. The VAR step and
initialisation are identical to basic 3D VAR; the forecast produces fields from
T+3 to T+9 for the next cycle.
The variation analysis increment for 4D VAR set up is at T-3. At each iteration
of the minimisation the Perturbation Forecast model is integrated from T-3 to
T+3 to give increments valid at the time of each observation; the ad joint
model then calculates gradients needed for minimising a penalty measuring the
deviations from the observations and from the background state at T-3. After
the same initialisation, the analysed increment is added to the full model
background at T-3, to start a 12 hour forecast giving the analysis at T+0 as
well as fields at the times needed for the next cycle.
4
Basic 4D VAR differs from 3D VAR with FGAT in 2 ways: the observed
increments are treated at the correct time, and the increment fields are evolving
from T-3 using Perturbation Forecast model. In order to distinguish these, a
new scheme called ‘synoptic 4D VAR’ is created. This treats the observations
exactly as 3D VAR with FGAT. For example, it assumes all the increments are
valid at T+0. The main difference is that the analysed increments are evolved
to this time from T-3 using Perturbation Forecast model, with corresponding
penalty gradients evolved back to T-3 using an evolved background-error
covariance. A minor difference is that the final analysis is evolved to T+0
using the full model. Basic 4D VAR has a similar evolution of the increments;
its differs from synoptic 4D VAR only in evaluating increments at the correct
time for each observation, rather than at T+0.
Results has shown that by allocating for the time of observation in the FGAT
had a positive impact on the scores; using evolved co-variances had a bigger
impact but it made bigger changes to the analyses; hence increasing the spread
of the distribution due to the chaotic growth of differences, allowing for the
time of observation in the increments had similar benefits to FGAT.
Other than the forecasting skills, which are obviously vital for NWP
application, there are other measures of analyses quality. A measure
commonly relied on the fit of the background to observation. For example, a
verification of the 6 hour forecasts. The left hand side curves show the global
fit to radiosonde winds measure within the variation analysis at the first
iteration. The left hand side curves show the fit of analyses at the last iteration
to observations used. This is a harder statistic to interpret qualitatively. As the
new surface the 3D VAR analyses were able to fit the observations more
closely than the 4D VAR scheme. This is possible because the very simple
physical parameterisations of the PF model could not generate the correct
frictional effects on the wind, whereas 3D VAR has more freedom to alter
their winds more directly to fit the observations.
In the free troposphere, 3D VAR with FGAT shows a closer fit of both
background and the analyses, but his introduction of evolved covariance with
synoptic 4D VAR cancels out this improvement. Finally allowing for
increments at the approximate time in basic 4D VAR makes the closeness of
fit similar again to 3D with FGAT.
The benefit seen from FGAT is an example of that to be gain from attention to
detail in high quality data assimilation scheme, where predictions of observed
values can have smaller errors than the observations themselves. Once error
levels are low it is important to address all sources of error, including mismatches in time, in order to reduce them further. The benefits from evolved
covariance are offset by errors due to Perturbation Forecast model and modes
not properly represented by the Perturbation Forecast model. Improvement to
the Perturbation Forecast model and model error term should allow much
longer time windows. It is also possible to obtain the benefit seen in our
5
synoptic 4D VAR experiments by using cleverly constructed flow dependent
covariance in 3D VAR.
Basic 4D VAR allow for the time of each observation in its implicit evolved
covariance, whereas synoptic 4D VAR used covariance for the average time,
T+0. The benefit seen from this was large, as our data selection was designed
to capture observations near synoptic times where possible. A significantly
bigger benefit is to be expected by including more data at non-synoptic times.
For global models the most important observations are sounding from polar
orbiting satellites; a 12 hours time window is needed to get two soundings at
most points. For regional models where the typical observation frequency is
higher, the benefit should be apparent with shorter window.
6
2.2
Euler-Lagrange equation
A simple 1D dimensional climate model in the meridional direction is
considered based on the maximum entropy production hypothesis. This model
calculates latitudinal distribution of the long emitted long wave radiation and
meridional heat transport for a given latitudinal distribution of the absorbed
solar radiation [2]. In the earth usual climate system, the absorbed solar
radiation dominates the emitted long wave radiation at low latitude but long
wave radiation dominates at high latitudes. The emitted long wave radiative
energy and absorbed solar radiation energy are balanced globally and
integration of the net radiative flux at the top of the atmosphere from the South
Pole to each latitude provides the required northward heat transport. These are
basic and important characteristics of the earth’s climate system but not
sufficient to determine the climate state.
A simple model based on Maximum Entropy Production (MEP) principle can
calculate meridional distribution of the surface temperature and clouds
amount, without treating detailed physical processes, for given distributions of
the insolation and surface albedo. By treating the problem analytically, an
Euler Lagrange equation and a numerical method solving it are obtained.
For latitudinal distributions of the absorbed solar radiation and emitted long
wave radiation, the notation I(θ) and O(θ) are used respectively, as functions
of the latitude θ.
The integration of the net radiation of the net radiative flux, provides a
measure of northward heat transport and the integration provides an entropy
production rate associated with the above heat transport, where a is the earth
radius, T(θ) is an equivalent temperature related to
by the equation. σ is
the Stefan-Boltzmann constant.
We can assume that I(θ) is a given function and try to obtain an appropriate
distribution of O(θ) for such an I(θ). A function J denoting the energy flux as
Where µ is the sine of the latitude (µ=sin θ).
The Euler Lagrange equation for a variational problem with a functional
K[y]=∫F(y’(x), y(x), x)dx is given by
7
We obtain the Euler Lagrange equation of this problem as
The general form of ad joint equation is
Where λ is the ad joint variable,
is the adjoint operator of the
linearization of f and g is the distribution function of a cost function.
8
2.3 The Operational Mesogamma-Scale Analysis and Forecast
System of the U.S Army Test and Evaluation Command
This 4DWX has been used at seven U.S Army test ranges, because most tests
have weather related environmental and safety constraints, forecasts are
required for test scheduling and now casts are required for test conduct. These
post test analyses of meteorological condition affecting test results require a
model based data assimilation system to dynamically interpolate between
observations when it is not possible to place sensors at the test location.
The Army Test and Evaluation Command (ATEC) collaborated on the
development and implementation of a completely new meteorological support
infrastructure called the 4DWX system. The 4DWX system at each test range
is tailored to meet the specific needs of that range.
The 4DWX modelling system is currently based on the fifth generation
Pennsylvania State University National Centre for Atmospheric Research
Mesoscale Model (MM5). The model has non-hydrostatic dynamics, a two
way interactive nesting procedure with coarse grids that provide boundary
conditions for fine grids running at smaller time steps and with feedback from
fine grids to coarse grids, and a radiative upper boundary condition that
mitigates noise resulting from the reflection of vertically propagating waves. It
also has timed-dependent lateral-boundary conditions, relaxed towards large
scale model forecast. A nudging zone of five rows and columns is specified at
the model lateral boundaries, with a nudging weight that allows the model
variable tendencies to relax gradually to the larger scale model forecasts along
the boundary. The model uses the Modified Medium- Range Forecast (MRF)
model boundary layer parameterization. The MRF parameterization is a non
local mixing scheme. The Richardson number is used to determine the depth
of the boundary layer. Clouds effects on radiation are allowed for shortwave
radiation, and the Rapid Radiative Transfer Model is used for long wave
radiation. The “Noah” land model with four soil layers is used. Soil moisture
and soil temperature are predicted at each grid point based on substrate and
atmospheric properties. The model has a land surface data assimilation system
that diagnoses current substrate moisture and temperature using in situ and
remotely sensed data. The model has 36 computational levels, with
approximately 12 levels within the lowest 1km.
Newtonian relaxation method was used as data assimilation. Data assimilation
by Newtonian relaxation is accomplished by adding non-physical nudging
terms model predictive equation [5]. These terms for model solution are each
grids point to observation or analyses of observations, in proportion to the
difference between the model solution and the data or analysis. This approach
was used because it is relatively efficient computationally, it is robust and
allows the model to ingest data continuously rather than intermittently, the full
9
model dynamics are part of the assimilation system so that analyses contain all
locally forced mesoscales features, and it does not unduly complicated the
structure of the model code. The implementation of Newtonian relaxation in
the 4DWX system forces the model solution towards observations rather than
toward analyses of the data. This approach was chosen because observations
on the mesoscale are sometimes sparse and typically are not very uniformly
distributed in space, making objective analysis difficult. With station nudging,
each observation is ingested into the model at its observed time and location,
with proper space and time weights, and the model spreads the information in
time and space according to the model dynamics.
10
2.4
Dew point Temperature Prediction
Dew point temperature is the temperature at which water vapour in the air will
condense into dew or water droplets given that the air pressure remains
constant. Dew point temperature is critical to the survival of plants especially
in regions that have infrequent rainfall.
In 2003, Hubbard developed a regression model for estimating the daily
average dew point temperature, using the daily mean, minimum, and
maximum air temperature as inputs. The research conducted used 14 years of
data for six cities. The accuracy of this regression model has a mean absolute
error of 2.2 ◦c for the most accurate regression equation. An ANN is a robust
computational technique modelled after biological neuron connections found
in human brains. Like human brain, ANN is repeatedly exposed to inputs and
varies the strength of the connections between neurons based on those inputs.
Thus, ANN is accomplished using an iterative process instead of single
calculation as would be used with most type of regression and Bayesian
classification. ANNs have been used to help solve many real world problems
such as pattern matching classification, and prediction
ANNs have been used in the atmospheric sciences. In the early days, ANN
used for prediction of ozone concentration, tornados, thunderstorms, solar
radiation, carbon dioxide and monsoon rainfall. In year 2000, it had been
developed using 38 years of rain fall data to predict monthly and yearly
precipitation levels for multiple site in the Czech Republic and in various areas
of western Sydney, Australia, it have been used as short term prediction
focused on predict flash flood rainfall amount for 15 minutes ahead. The
Canadian used an ensemble of ANN to provide 24 hours prediction for
average temperature, wind speed and humidity at Regina Airport in Canada.
A separate ANN (ANN) model incorporating the error back propagation
(EBP) algorithm was developed. The EBP ANN consists of artificial neurons,
called nodes, arranged into three layers: input, hidden and output. The input
layer receives the data on case at a time; on or more hidden layers connect the
input and output layers and the output layer is interpreted as the prediction,
classification, or pattern. Each node at each layer is connected to some or all
the nodes in the next layer and each connection has a weight which changes
the value going through that connection. The nodes in the hidden layer and
output layer can receive inputs from several nodes. These inputs are summed
and then presented to an activation function. An error is calculated as the
difference between the ANN output and the observed value associated with
that input. The partial derivatives of that error are used to adjust the weights
using a gradient descent.
11
An EBP ANN model has two nodes. The first is a feed forward node where a
set of inputs xi, where I ranges from 1 to I, is mapped to a single output z by
the following equations:
where
are the weights from the input layer to the hidden layer are the
weights from the hidden layer to the output node, and is the output of the
nodes in the hidden layer, where j range from 1 to J. The logistic activation
function g is defined as follows:
Where n is the input to the activation function. The hyperbolic tangent,
Gaussian, and Gaussian complement are the respective components of the
hidden layer activation function f, defined as follows:
Where n is the input to the activation function.
The second mode of the ANN is back propagating the error to adjust the
weights. The weight adjustment
for each weight from the hidden layer
to output node is defined as
The weight adjustment
for each weight from the input layer to the
hidden layer
is defined as
Where n is the learning rate and t is the target output value. The nodes y0 and
x0 are bias nodes that are always set to 1, although their corresponding weights
are adjusted.
The model yields the following result, the mean absolute error for the 1, 4, 8
and 12 hours prediction models are 0.550◦C, 1.234◦C, 1.799◦C and 2.281◦C,
respectively, with a coefficient of determination (r2) of 0.993, 0.964, 0.924 and
12
0.889, respectively. As the mean absolute error values increased and the r2
values decreased as the lead time increased. There was also a tendency to over
predict at low dew point temperatures. A comparison was conducted for the
final results model evaluation with prediction using the current dew point
temperature as the predicted temperature for the same observations. The
improvement if the ANN model over the current dew point temperature was
0.035◦C for the 1 hour model, 0.162◦C for the 2 hours model, 0.212◦C for the 3
hours model, and varied between 0.3◦C and 0.4◦C for the 4-12 hours models.
The percentage improvement for the 2-10 hours models was relatively similar,
ranging from 15.5% to 21.4%, but differed at the lower end, where the 1 hour
model improved by only 6%and at higher end where the 11 hours model
improvement was 14.7% and the 12 hours model improvement was 11.9%.
In this project, a similar approach will be made to create the climate model
using the ANN presented.
13
2.5
Overview of Artificial Neural Network.
Nature has developed a very complex neuronal morphology in biological
species. Biological neurons, over one hundred billion in number, in central
nervous systems of humans play a very important role in the various complex
sensory, control, affective and cognitive aspects of information processing and
decision making. In neuronal information processing, there are a variety of
complex mathematical operations and mapping functions that act in synergism
in a parallel cascade structure forming a complex pattern of neuronal layers
evolving into a sort of pyramidal pattern. The information flows from one
neuronal layer to another in the forward direction with continuous feedback
and it evolves into a dynamic pyramidal structure. The structure is pyramidal
in the sense of the extraction and convergence of information at each point in
the forward direction. A study of biological neuronal morphology provides not
only a clue but also a challenge in the design of a realistic cognitive computing
machine.
The ANN is modelled based on the biological neural network. Like the
biological neural network, the ANN is an interconnection of nodes, analogous
to neurons [5]. Each neural network has three critical components: node
character, network topology, and learning rules. Node character determines
how signals are processed by the node, such as the number of inputs and
outputs associated with the node, the weight associated with each input and
output, and the activation function. Network topology determines the ways
nodes are organised and connected. Learning rules determine how the weights
are initialised and adjusted.
Node Character
The basic model for a node in the ANN is shown below. Each node receives
multiple inputs from others via connections that have associated weights,
analogous to the strength of the synapse. When the weighted sum of inputs
exceed the threshold value of the node, it activates and passes the signal
through a transfer function and send it to neighbouring nodes. This process can
be express as a mathematical model:
Where y is the output of the node, f is the function,
is the weight of input
and T is the threshold value. The transfer function has many forms. A nonlinear transfer function is more useful than the linear ones, since only a few
problems are linear separable. The simplest one is the step function:
14
The sigmoid function also is often used as the activation function, since the
function and its derivative are continuous.
X1
W1
f
X2
y
W2
node
Xn
Wn
`
Network Topology
In ANN, the nodes are organised into linear arrays called layers. Usually, there
are inputs layers, output layers and hidden layers. There can be none to several
hidden layers. Designing the network topology involves the determining the
number of nodes at each layer, the number of layers in the network, and the
path of the connections among the nodes. Usually, those factors are initially
set by intuition and optimized through multiple cycles of experiments. Also
some rational methods can be used to design a neural network. For example,
the genetic neural network uses a generic algorithm to select the input features
for the neural network solving quantitative structure-activity relationship
problem.
There are two types of connection made between nodes. One is a one way
connection with no loop back. The other is a loop back connection in which
the output of the nodes can be the input to previous or same level nodes. Based
on the aforementioned type of connections, neural networks can be classified
into two types: feed forward network and feedback network. Because the
signal travels one way only, the feed forward network is static; that is, one
input is associated with one particular output. The feedback network is
dynamic. For one input, the state of the feedback changes for many cycles,
until it reaches an equilibrium point, so one input produce a series of outputs.
Preceptron is a widely used feed forward network.
Learning rules
The ANN uses a learning process to train the network. During the training,
weights are adjusted to desired values. The learning can be classified into two
major categories: supervised learning and unsupervised learning. In supervised
learning, a training set, that is, examples of inputs and corresponding target
15
outputs, is provided. The weights are adjusted to minimise the error between
the network and the correct output. Special consideration is needed to
construct the training set. The ideal training set must be representative of the
underlying model. An unrepresentative training set cannot produce a very
reliable and general model. For networks using supervised learning, the
network must be trained first. When the network produces the desired outputs
for a series of inputs, the weights are fixed and the network can be put in
operation. In contrast, unsupervised does not use target output values from a
training set. The network tries to discover the underlying pattern or trend in the
input data alone. Different types of networks require different learning
processes.
Many different learning schemes have been invented for ANNs to achieve
different learning goals. The most frequently used learning approaches are
error correction methods and nearest neighbour methods.
Error correction methods normally have a back propagation mechanism. Let
yk,n be the output of the kth output node at step n and yk be the target output for
the kth node. An error function can be defined as the difference between the
node output and target output:
The Back Propagation Algorithm is an iterative gradient algorithm designed to
minimize the mean square error between the actual output and the desired
output. This algorithm is also known as “The generalised delta rule” The
neurons in layers, other than input and output layers are called the hidden units
or hidden nodes, as their outputs do not directly interact with the environment.
With the Back Propagation Algorithm, the weights associated with the hidden
layers an also be adjusted and thus enable the ANNs to learn.
16
Word Count: 3938
Chapter 3. Objectives
3.1
Objectives of Project
The objective of this project is to design a system to recommend
environmental weather condition for a new town with reference from a
particular climate model. In this project, ANN is used to predict the
environmental weather condition for the new town. An in depth description of
the climate model will be discuss in Chapter 5 of this report.
3.2
Main Technique Used
MATLAB is used as the platform to perform the mathematical computation
for the Neural Network. The computation on the MATLAB programme is
based on the Theory of Neuronal Approximation using feed forward neural
network with back propagation algorithm.
The theory of functions approximation is an important class of problems in
both static and dynamic processes. The theory of neuronal approximations has
captured the attention of neural scientists at the IEEE First International
Conference of Neural Networks in 1987 held in San Diego when R. HechtNielsen reiterated the theorem of Kolmogorov’s theorem states that one can
express a continuous multivariable function, on a compact domain, in terms of
sums and compositions of single variable functions. [5] The number of single
variable functions required is finite. It implies that there are no nemesis
functions that cannot be approximated by neural networks. The parallel and
layered morphology of the neural systems is responsible for solving a wider
class of problems in fields such as system approximation, control, learning and
adaptation.
The functional approximation capability of feed forward neural network
architecture is one of the properties of the neural structures and had potentials
for applications to problems such as system identification, recognition. A feed
forward network structure may be treated as a rule for computing the output
values of the neurons in the ith layer using the output values of the (i-1)th
layer, hence implementing class of mapping from the input space xn to the
output space xm.
The Back Propagation Algorithm is an iterative gradient algorithm designed to
minimize the mean square error between the actual output and the desired
output. This algorithm is also known as “The generalised delta rule” The
neurons in layers, other than input and output layers are called the hidden units
or hidden nodes, as their outputs do not directly interact with the environment.
17
With the Back Propagation Algorithm, the weights associated with the hidden
layers an also be adjusted and thus enable the ANN to learn.
Word Count: 403
18
Chapter 4.
4.1
Project Management
Gantt Chart
Jan 09
Activities
Literature
Review
Collation of
information
Writing Initial
Report
Review on
Climate Model
Start
Completion
Date
Date
11 Jan
30 Aug
9 Feb
1 Mar
9 Feb
1 Mar
2 Mar
5 Apr
6 Apr
26 Apr
13 Apr
26 Apr
4 May
2 Aug
3 Aug
23 Aug
17 Aug
30 Aug
31 Aug
13 Sep
14 Sep
27 Sep
28 Sep
11 Oct
12 Oct
25 Oct
26 Oct
8 Nov
16 Nov
28 Nov
Feb 09
Mar 09
Apr 09
May 09
Jun 09
Jul 09
Aug 09
Sep 09
Oct 09
Nov 09
Duration
Determine the Type
of Climate Model
used
Writing of Interim
Report
Creating climate
model
Evaluating Climate
Model
Troubleshooting of
Climate Model
Writing of skeleton
for final report
Writing of
final report
Formatting and
finalising content for
report
Send supervisor
corrected version for
binding
Design of Project
Poster
Presentation
preparation
Table 1: Project Plan Schedule
19
Literature review is to gather information on meteorology. As I am not familiar in the field of
meteorology, more time is require for me to read up on journals, books and internet articles
on this particular subject. These will be done at NUS, NTU and National Libraries. As most
of this journals and books could not be loan out of the libraries therefore, reading can only be
done at their premises.
Collation of information is to collate all the information found and prepare it for the drafting
of the initial report.
Writing initial report. After the writing the initial report, all the information gathered are
pieced together. This gives me a better idea and understanding project. It also helps me in
planning the time schedule for this project.
Review on climate model. This is to find out the advantages and disadvantages of some of the
climate model being used so as to help me have a better perspective in creating the climate
model.
Creating climate model. The program I will use to create the climate model for simulation is
MATLAB. As I am more familiarise in using the program. With the help of the workshop on
MATLAB organise by UniSIM, I hope that I will have a better knowledge in using the
program to create the model.
Evaluating climate model. After the simulation program had been created, I will evaluate the
accuracy of the program with real data input using the charts and graphs. After evaluating the
program, I will do a review on the program where necessary.
Troubleshooting of climate model. If program unable to produce the right result, necessary
adjustment will be made to the program.
Writing of skeleton for final report. A content page will be draft out with the headings and
sub headings to determine the content of the final report.
Writing of final report. This report will illustrate all the research and findings from this
project, thus more time is plan on writing the final report.
Formatting and finalising content of report. The report will be send to project supervisor for
critics and necessary adjustment will be made before sending the final version for binding.
Design of project poster. This is to abstract the main essence from the final report and present
the result and findings on a A1 size poster.
Presentation preparation. This includes design the layout of the presentation poster and
organise my presentation.
Word Count: 401
20
Chapter 5. Design of Project
5.1
Introduction of Climate Model
Climate model is a mathematical simulation of the processes that affect the
atmosphere and produce weather prediction of a particular small area like a
town or over large regions of land. It is used as a tool to help us to understand
the processes and forecasting how the changes may affect weather and climate.
Climate model usually consists of a computer program such in the form of
series of equation such as the ANN, Chemical Transport Model and Euler
Lagrange equation. These models allow the physical laws controlling the
weather to be applied but this is possible only to an extent because not all
climate processes are fully understood.
Generally, a climate model can be classified base on the different dimensional
grids which most models began the construction with. The grid may be a two
dimensional or three dimensional. Two dimensional models may represent two
horizontal dimensions, like the lines of latitude and longitude on a map. Initial
data on factors such as air pressure, temperature, humidity, cloud amount and
wind speed are applied to each intersection between the grids lines where all
calculation of the physical effects are made. The sensitivity of the model
depends on the scale of the grid. The smaller the distances between each grid
lines, the more accuracy it will have but this will also resulted in an increased
of number of calculations and therefore, the computing power of the program
will also be increased. The more advance supercomputer are used to construct
and run the more complex models and the reliability of the models is directly
proportional to the amount of computational powers, however, all models
make assumptions about factors that are not well understood.
All models are subjected to various kinds of test before they can be used to
estimate the consequences of change. These tests are conducted by using the
data from recent past then run the program to observe how well it simulates
the weather conditions that were actually recorded. If the test is successful, the
model will then be used to simulate conditions from the more distant past as an
aid to understanding how those conditions developed. After all these test, the
model will then be used to predict the future weather conditions.
5.2
Description on the type of Climate Model adopted
The type of Climate Model adopted will be Neural Network or ANN which is
a robust computational technique modelled after biological neuron
connections found in human brain. It is one of the areas of the current research
and is attracting people from a wide variety of disciplines of science and
technology. It can be used to predict average air temperature, wind speed and
humidity.
In ANN, the fundamental unit that is used is an approximated mathematical
model of a neuron. The connection strength between layers is called weight.
The process of adjustment of weights is called learning or training. Learning
21
procedure is constructing new representations and the results of learning can
be viewed as numerical solutions to the problem of whether to use local or
distributed representations. The learning can be classified into two major
categories: supervised learning and unsupervised learning. In supervised
learning, a training set, that is, examples of inputs and corresponding target
outputs, is provided. The weights are adjusted to minimise the error between
the network and the correct output.
An EBP algorithm can be incorporated with ANN. It consists of artificial
neurons, called nodes, which is arranged in three layers. The input, hidden and
output layer. The input layer is where the data is being entered into the
network while the output layer is the results or the prediction of the data. Each
node at each later is connected to some or all the nodes in the next layer and
each connection has a weight which changes the value going through that
connection. The nodes in the hidden layer and output layer can receive inputs
from several nodes. These inputs are added and presented to an activation
function. An error is computed as the variance between the output data and the
observed data with the input. The partial derivatives of that error are used to
adjust the weights using gradient descent. As the number of nodes increases, it
will reduce the error but the time taken for the computation will also increase.
An EBP ANN model has two nodes. The first is a feed forward node where a
set of inputs xi, where I ranges from 1 to I, is mapped to a single output z by
the following equations:
where
are the weights from the input layer to the hidden layer are the
weights from the hidden layer to the output node, and is the output of the
nodes in the hidden layer, where j ranges from 1 to J. The logistic activation
function g is defined as follows:
Where n is the input to the activation function. The hyperbolic tangent,
Gaussian, and Gaussian complement are the respective components of the
hidden layer activation function f, defined as follows:
22
Where n is the input to the activation function.
The second mode of the ANN is back propagating the error to adjust the
weights. The weight adjustment
for each weight from the hidden layer
to output node is defined as
The weight adjustment
for each weight from the input layer to the
hidden layer
is defined as
Where n is the learning rate and t is the target output value. The nodes y0 and
x0 are bias nodes that are always set to 1, although their corresponding weights
are adjusted [7].
5.3
Type of Software used
The type of software that will be used in this project is MATLAB. It will be
used to compute and predict the average temperature using the Neural
Networks tool box. As compare to other Neural Network software such as
DTREG and Neural Tools, the advantage of MATLAB is it is a more user
friendly software and the software is also widely used in other modules in my
course of studies therefore I am able to use the program more efficiently and
effectively.
5.4
Description of the Program
MATLAB stands for matrix laboratory. It is a high-performance language for
technical computing. It integrates computation, visualization, and
programming in an easy-to-use environment where problems and solutions are
expressed in familiar mathematical notation. Typical uses include
mathematical computation, algorithm development, data acquisition,
modelling, simulation, data analysis, scientific and engineering graphics.
MATLAB is an interactive system whose basic data element is an array that
does not require dimensioning [9]. This allows you to solve many technical
computing problems, especially those with matrix and vector formulations, in
a fraction of the time it would take to write a program in a scalar
noninteractive language such as C or FORTRAN.
23
Word Count: 1169
Chapter 6. Experimentation of Program
6.1
Type of test conducted
In this project, the hourly average air temperature will be taken between 18
September 2009 and 7 October 2009 for the town of Wilma, Florida [8]. The
first 10 days of data which consist of 240 samples will be used as the input
data that will be fed to the Neural Network and the next 10 days of data
between 28 September 2009 to 7 October 2009 will be used for validation on
the performance of the Neural Network. This set of data is included in
Appendix 1 of this report. A comparison will be made between the predicted
and the observed hourly average air temperature to determine the accuracy of
the Neural Network.
Mean Square Error will be used to quantify the difference between the
predicted air temperature and the observed air temperature. Mean Square Error
measure the average of the square of the error. The error is the amount by
which the estimator differs from the quantity to be estimated. The difference
occurs because of randomness or because the estimator does not account for
the information that could produce a more accurate estimate.
During the training phase, Levenberg-Marquardt optimization is used as the
training method as it is able to trains a neural network 10 to 100 times faster
than the usual gradient descent back propagation method. It always computes
the approximate Hessian matrix, which has dimensions n-by-n.
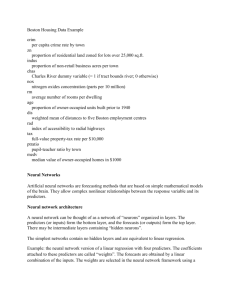
The parameters for Model 1 will be set as follows, 60% of the samples will be
randomly selected to be used for training, these set of data are presented to the
network during training phase and the network is adjusted according to its
error. 20% of it will be used for testing which is used to measure network
generalization, and to halt training when generalization stops improving. 20%
will be used for validation, these set of data has no effect on training and so
provide an independent measure of network performance during and after
training. The number of hidden layers or neurons will be set at 30. The
network architecture is shown in Figure 1 below.
Figure 1. Network architecture of Neural Network with 30
hidden layers
24
The parameters for the Model 2 will be set similarly as the Model 1 but the
numbers of hidden layers or neurons set will be set at 60. This is to determine
if the increase in number of neurons will affect the performance of the Neural
Network. The network architecture is shown in Figure 2 below.
Figure 2 Network architecture of Neural Network with 60
hidden layers
Word Count: 426
25
Chapter 7. Results
7.1
Model 1
After running the Neural Program, the predicted hourly average air
temperature from 28 September to 7 October by Model 1 of the Neural
Network as explained in the previous chapter as illustrated in Figure 3. While
Figure 4 shows the observed hourly air temperature for the same period. This
set of result yield a Mean Square Error of 0.0825.
Figure 3. Predicted Average Air Temperature from 28 September to 7 October
Figure 4. Observed Average Air Temperature from 28 September to 7 October
26
From Figure 5, we can clearly see that the predicted hourly air temperature is
close to the observed hourly air temperature. The error margin in temperature
between the predicted and the observed temperature is illustrated in Figure 6.
The error in temperature varies between -1.2℃ to 1.6℃.
Figure 5. Predicted / Observed Average Air Temperature from 28 September to 7 October for Model 1
Figure 5
Figure 6. Error margin between Predicted and Observed average air temperature for Model 1
With reference from the Mean Square Error of the predicted temperature, we
are able to conclude that the accuracy of this Model is fairly accurate as there
are a few occasions that the variance margin is more than 0.5℃
27
7.2
Model 2
In Model 2 of the Neural Network, the number of hidden neurons is increase to
60. The predicted and observed hourly air temperature is illustrated in Figure
7. This set of result yield a Mean Square Error of 0.0816. The error in
temperature varies between -1.08℃ to 1.96℃.
Figure 7. Predicted / Observed Average Air Temperature from 28 September to 7 October for Model 2
Figure 8. Error margin between Predicted and Observed average air temperature for Model 1
For Model 2, the number of hidden neurons increases from 30 to 60 and this
reduces the Mean Square Error from 0.0825 to 0.0816 which implies that a
further increase in the number of hidden neurons is unnecessary as it had
negligible effect on the performance of the Neural Network.
Word Count 266
28
Chapter 8. Conclusion
8.1
Achievement
During the 10 months of completing this capstone project, I have gain better
knowledge in the field of meteorology through the various journals, books and
articles that I have read and review. Especially in weather forecasting, the
main research topic that I am focusing on in this project. I have also learnt how
to use the Neural Network Tool in the MATLAB software to predict the
weather with a set of given input data. Other then the knowledge gains in the
various aspects, a lot of soft skills such as project and time management using
the Gantt chart were also learnt. As this project spreads over 10 months, time
management and discipline in doing the project by following the timeline as
plan is important so as not to complete in project at the last hour.
8.2
Challenges Faced
The main challenge faced during while doing this project is the initial process
of gathering information. This is my first time dealing with the subject on
meteorology therefore I am unfamiliar with it. There are lots of resources
available in the libraries to widen my knowledge on meteorology but with
limited time, I will have to be selective on the area that I need to review. Time
commitment in completing the project on time is another challenge. As we are
working full time therefore, work commitment will take a higher priority but
nevertheless, some sacrifices were made to allow me to complete this project
within the stipulated time.
Word Count: 250
29
Chapter 9. Recommendation for further improvement
In this project, only one parameter, the average air temperature is being used as for
computation. Further improvement such as to include multiple parameters like Relative
Humidity, Solar Radiation and Wind Speed etc. as the input to predicted if a particular day is
rainy, sunny or windy. Another possible improvement that can be consider is to improve on
the region that is to be forecasted as currently, the region that is consider is a size of a town.
Word Count: 84
30
Chapter 10. Critical review and reflection
After completing this capstone project, which marks the final stage of my studies for the
degree programme I am glad that I have learnt a lot of new knowledge as well as soft skills
especially while completing this capstone project. During the 10 months of completing this
capstone project, there were times that obstacles was faced especially in the beginning of 10
months of this journey but with regular meetings with my project supervisor, Mr Nava
Selvaratnam, who provide constructive advices and words of encouragement to spur me on to
complete this capstone project on time.
Word Count: 102
Grand Total: 8484
31
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
Andrew C. Lorenc and F. Rawlins, “Why Does 4D-VAR Beat 3D-VAR”
Quarterly Journal of Royal Meteorological Society Vol. 131, Oct 2005, Part C Pg
3247.
Shigenori Murakami and Akio Kitoh, “Euler-Lagrange Equation of the Simple 1-D
Climate Model Based on the Maximum Entropy Production Hypothesis” Quarterly
Journal of Royal Meteorological Society, Vol. 131, Apr 2005, Part B Pg 1529.
Yubao Liu, Thomas T.Warner, James F.Bowlers, Laurie P.Carson, “The Operational
Mesogamma-Scale Analysis and Forecast System of the US Army Test and
Evaluation Command” Journal of Applied Meteorology and Climatology, Vol. 47,
April 2008, Pg 1077.
D.B Shank, G. Hoogenboom, R.W McClendon, “Dew point Temperature Prediction
using Artificial Neural Networks” Journal of Applied Meteorology and Climatology,
Vol. 47, June 2008, Pg 1757.
Livingstone, David, Artificial Neural Network: Methods and Application, 2008.
Simon Haykin, Neural Networks, A Comprehensive Foundation, 1999.
Madan M.Gupta, Liang Jin, Noriyasu Homma, Static and Dynamic Neural Networks
from Fundamentals to Advanced Theory, 2003.
http://www.wrcc.dri.edu/cgi-bin/wea_list.pl?laFWIL (last access on 12 October 2009)
Howard Demuth, Mark Beale, Martin Hagan, Neural Network Toolbox™ 6 User’s
Guide.
Steven k. Rogers, Matthew Kabrisky, An introduction to Biological & Artificial
Neural Network for pattern recognition, 1991.
Phil Picton, Neural Networks Second Edition, 2000.
Jacek M. Zurada, Introduction to Artificial Neural Systems, 1992.
R-1
Appendix 1. Hourly Average Air Temperature for Wilma, Florida from 18
September to 7 October
Date
Time
Deg C
Date
Time
Deg C
DD/MM/YYYY
hh:mm
Average Air Temp
DD/MM/YYYY
hh:mm
Average Air Temp
18/9/2009
0:00
23.33
19/9/2009
13:00
31.11
18/9/2009
1:00
23.33
19/9/2009
14:00
24.44
18/9/2009
2:00
23.33
19/9/2009
15:00
24.44
18/9/2009
3:00
23.33
19/9/2009
16:00
23.89
18/9/2009
4:00
23.33
19/9/2009
17:00
23.89
18/9/2009
5:00
23.33
19/9/2009
18:00
23.89
18/9/2009
6:00
23.33
19/9/2009
19:00
23.89
18/9/2009
7:00
22.22
19/9/2009
20:00
23.33
18/9/2009
8:00
23.33
19/9/2009
21:00
23.33
18/9/2009
9:00
24.44
19/9/2009
22:00
22.78
18/9/2009
10:00
26.11
19/9/2009
23:00
22.78
18/9/2009
11:00
28.33
20/9/2009
0:00
23.33
18/9/2009
12:00
29.44
20/9/2009
1:00
23.33
18/9/2009
13:00
30.56
20/9/2009
2:00
22.78
18/9/2009
14:00
29.44
20/9/2009
3:00
22.78
18/9/2009
15:00
30.56
20/9/2009
4:00
22.78
18/9/2009
16:00
30.56
20/9/2009
5:00
22.78
18/9/2009
17:00
30.56
20/9/2009
6:00
22.78
18/9/2009
18:00
27.78
20/9/2009
7:00
23.33
18/9/2009
19:00
25.56
20/9/2009
8:00
23.89
18/9/2009
20:00
24.44
20/9/2009
9:00
25.56
18/9/2009
21:00
23.89
20/9/2009
10:00
28.33
18/9/2009
22:00
23.33
20/9/2009
11:00
30.56
18/9/2009
23:00
23.33
20/9/2009
12:00
31.11
19/9/2009
0:00
22.22
20/9/2009
13:00
32.22
19/9/2009
1:00
22.78
20/9/2009
14:00
31.67
19/9/2009
2:00
22.22
20/9/2009
15:00
32.78
19/9/2009
3:00
22.78
20/9/2009
16:00
31.67
19/9/2009
4:00
23.33
20/9/2009
17:00
31.11
19/9/2009
5:00
22.78
20/9/2009
18:00
30
19/9/2009
6:00
22.78
20/9/2009
19:00
25.56
19/9/2009
7:00
22.78
20/9/2009
20:00
24.44
19/9/2009
8:00
25
20/9/2009
21:00
23.33
19/9/2009
9:00
27.78
20/9/2009
22:00
22.78
19/9/2009
10:00
30
20/9/2009
23:00
22.78
19/9/2009
11:00
31.11
21/9/2009
0:00
23.33
19/9/2009
12:00
28.89
21/9/2009
1:00
22.78
A-1
Date
Time
Deg C
Date
Time
Deg C
DD/MM/YYYY
hh:mm
Average Air Temp
DD/MM/YYYY
hh:mm
Average Air Temp
21/9/2009
1:00
22.78
22/9/2009
17:00
30
21/9/2009
2:00
23.33
22/9/2009
18:00
28.33
21/9/2009
3:00
23.33
22/9/2009
19:00
26.11
21/9/2009
4:00
23.33
22/9/2009
20:00
24.44
21/9/2009
5:00
23.33
22/9/2009
21:00
23.89
21/9/2009
6:00
23.33
22/9/2009
22:00
23.33
21/9/2009
7:00
23.89
22/9/2009
23:00
22.78
21/9/2009
8:00
25
23/9/2009
0:00
22.22
21/9/2009
9:00
26.67
23/9/2009
1:00
22.22
21/9/2009
10:00
26.67
23/9/2009
2:00
21.67
21/9/2009
11:00
26.67
23/9/2009
3:00
21.67
21/9/2009
12:00
29.44
23/9/2009
4:00
21.67
21/9/2009
13:00
31.67
23/9/2009
5:00
21.11
21/9/2009
14:00
30.56
23/9/2009
6:00
21.11
21/9/2009
15:00
28.89
23/9/2009
7:00
21.11
21/9/2009
16:00
31.67
23/9/2009
8:00
23.33
21/9/2009
17:00
30.56
23/9/2009
9:00
27.22
21/9/2009
18:00
30.56
23/9/2009
10:00
29.44
21/9/2009
19:00
26.67
23/9/2009
11:00
31.11
21/9/2009
20:00
25.56
23/9/2009
12:00
32.22
21/9/2009
21:00
25
23/9/2009
13:00
32.22
21/9/2009
22:00
24.44
23/9/2009
14:00
32.78
21/9/2009
23:00
23.89
23/9/2009
15:00
33.89
22/9/2009
0:00
23.89
23/9/2009
16:00
32.78
22/9/2009
1:00
23.89
23/9/2009
17:00
32.22
22/9/2009
2:00
23.33
23/9/2009
18:00
30.56
22/9/2009
3:00
23.33
23/9/2009
19:00
26.67
22/9/2009
4:00
23.33
23/9/2009
20:00
27.22
22/9/2009
5:00
23.89
23/9/2009
21:00
27.22
22/9/2009
6:00
23.89
23/9/2009
22:00
25.56
22/9/2009
7:00
23.89
23/9/2009
23:00
25
22/9/2009
8:00
25.56
24/9/2009
0:00
24.44
22/9/2009
9:00
27.78
24/9/2009
1:00
23.33
22/9/2009
10:00
29.44
24/9/2009
2:00
22.78
22/9/2009
11:00
30.56
24/9/2009
3:00
22.78
22/9/2009
12:00
31.67
24/9/2009
4:00
22.78
22/9/2009
13:00
31.67
24/9/2009
5:00
22.22
22/9/2009
14:00
32.22
24/9/2009
6:00
22.78
22/9/2009
15:00
31.67
24/9/2009
7:00
22.78
22/9/2009
16:00
30.56
24/9/2009
8:00
23.89
A-2
Date
Time
Deg C
Date
Time
Deg C
DD/MM/YYYY
hh:mm
Average Air Temp
DD/MM/YYYY
hh:mm
Average Air Temp
24/9/2009
9:00
26.67
26/9/2009
1:00
22.22
24/9/2009
10:00
29.44
26/9/2009
2:00
22.22
24/9/2009
11:00
30
26/9/2009
3:00
22.22
24/9/2009
12:00
31.11
26/9/2009
4:00
22.22
24/9/2009
13:00
32.78
26/9/2009
5:00
21.67
24/9/2009
14:00
32.78
26/9/2009
6:00
21.11
24/9/2009
15:00
32.78
26/9/2009
7:00
21.11
24/9/2009
16:00
32.78
26/9/2009
8:00
24.44
24/9/2009
17:00
32.22
26/9/2009
9:00
28.89
24/9/2009
18:00
27.22
26/9/2009
10:00
31.67
24/9/2009
19:00
25
26/9/2009
11:00
32.22
24/9/2009
20:00
23.89
26/9/2009
12:00
32.78
24/9/2009
21:00
23.33
26/9/2009
13:00
34.44
24/9/2009
22:00
23.89
26/9/2009
14:00
32.78
24/9/2009
23:00
23.33
26/9/2009
15:00
32.78
25/9/2009
0:00
22.78
26/9/2009
16:00
28.33
25/9/2009
1:00
22.22
26/9/2009
17:00
30.56
25/9/2009
2:00
22.22
26/9/2009
18:00
28.33
25/9/2009
3:00
22.22
26/9/2009
19:00
25.56
25/9/2009
4:00
22.22
26/9/2009
20:00
24.44
25/9/2009
5:00
22.22
26/9/2009
21:00
24.44
25/9/2009
6:00
22.22
26/9/2009
22:00
23.89
25/9/2009
7:00
22.78
26/9/2009
23:00
24.44
25/9/2009
8:00
25
27/9/2009
0:00
23.89
25/9/2009
9:00
28.89
27/9/2009
1:00
23.89
25/9/2009
10:00
31.11
27/9/2009
2:00
22.78
25/9/2009
11:00
31.67
27/9/2009
3:00
22.78
25/9/2009
12:00
32.22
27/9/2009
4:00
22.22
25/9/2009
13:00
33.89
27/9/2009
5:00
21.67
25/9/2009
14:00
32.78
27/9/2009
6:00
21.67
25/9/2009
15:00
31.67
27/9/2009
7:00
22.22
25/9/2009
16:00
29.44
27/9/2009
8:00
23.89
25/9/2009
17:00
28.89
27/9/2009
9:00
26.11
25/9/2009
18:00
27.78
27/9/2009
10:00
27.22
25/9/2009
19:00
26.11
27/9/2009
11:00
27.22
25/9/2009
20:00
25
27/9/2009
12:00
27.22
25/9/2009
21:00
23.89
27/9/2009
13:00
28.89
25/9/2009
22:00
23.33
27/9/2009
14:00
30
25/9/2009
23:00
23.33
27/9/2009
15:00
29.44
26/9/2009
0:00
22.78
27/9/2009
16:00
30.56
A-3
Date
Time
Deg C
Date
Time
Deg C
DD/MM/YYYY
hh:mm
Average Air Temp
DD/MM/YYYY
hh:mm
Average Air Temp
27/9/2009
18:00
28.33
29/9/2009
11:00
29.59
27/9/2009
19:00
23.33
29/9/2009
12:00
27.79
27/9/2009
20:00
21.67
29/9/2009
13:00
29.76
27/9/2009
21:00
21.11
29/9/2009
14:00
24.12
27/9/2009
22:00
20.56
29/9/2009
15:00
24.12
27/9/2009
23:00
20
29/9/2009
16:00
23.53
28/9/2009
0:00
21.72
29/9/2009
17:00
23.53
28/9/2009
1:00
21.72
29/9/2009
18:00
23.53
28/9/2009
2:00
21.64
29/9/2009
19:00
23.53
28/9/2009
3:00
21.58
29/9/2009
20:00
21.72
28/9/2009
4:00
21.55
29/9/2009
21:00
21.72
28/9/2009
5:00
21.87
29/9/2009
22:00
22.67
28/9/2009
6:00
21.75
29/9/2009
23:00
22.98
28/9/2009
7:00
22.69
30/9/2009
0:00
21.72
28/9/2009
8:00
21.72
30/9/2009
1:00
21.72
28/9/2009
9:00
22.80
30/9/2009
2:00
22.53
28/9/2009
10:00
23.65
30/9/2009
3:00
22.53
28/9/2009
11:00
25.23
30/9/2009
4:00
22.53
28/9/2009
12:00
28.54
30/9/2009
5:00
22.53
28/9/2009
13:00
29.20
30/9/2009
6:00
22.53
28/9/2009
14:00
28.54
30/9/2009
7:00
21.72
28/9/2009
15:00
29.20
30/9/2009
8:00
24.01
28/9/2009
16:00
28.78
30/9/2009
9:00
23.67
28/9/2009
17:00
29.52
30/9/2009
10:00
25.87
28/9/2009
18:00
24.91
30/9/2009
11:00
29.74
28/9/2009
19:00
23.89
30/9/2009
12:00
29.57
28/9/2009
20:00
23.95
30/9/2009
13:00
29.90
28/9/2009
21:00
23.53
30/9/2009
14:00
29.53
28/9/2009
22:00
21.72
30/9/2009
15:00
30.11
28/9/2009
23:00
21.72
30/9/2009
16:00
29.53
29/9/2009
0:00
23.12
30/9/2009
17:00
29.29
29/9/2009
1:00
23.14
30/9/2009
18:00
29.17
29/9/2009
2:00
22.58
30/9/2009
19:00
23.89
29/9/2009
3:00
22.53
30/9/2009
20:00
23.95
29/9/2009
4:00
21.72
30/9/2009
21:00
21.72
29/9/2009
5:00
22.43
30/9/2009
22:00
22.53
29/9/2009
6:00
22.67
30/9/2009
23:00
22.53
29/9/2009
7:00
22.50
1/10/2009
0:00
21.72
29/9/2009
8:00
24.04
1/10/2009
1:00
22.53
29/9/2009
9:00
24.91
1/10/2009
2:00
21.67
A-4
Date
Time
Deg C
Date
Time
Deg C
DD/MM/YYYY
hh:mm
Average Air Temp
DD/MM/YYYY
hh:mm
Average Air Temp
1/10/2009
4:00
21.72
2/10/2009
21:00
23.33
1/10/2009
5:00
21.72
2/10/2009
22:00
22.14
1/10/2009
6:00
22.16
2/10/2009
23:00
22.53
1/10/2009
7:00
23.78
3/10/2009
0:00
22.58
1/10/2009
8:00
24.04
3/10/2009
1:00
22.58
1/10/2009
9:00
23.60
3/10/2009
2:00
21.65
1/10/2009
10:00
23.60
3/10/2009
3:00
23.45
1/10/2009
11:00
23.60
3/10/2009
4:00
22.43
1/10/2009
12:00
28.54
3/10/2009
5:00
22.41
1/10/2009
13:00
29.53
3/10/2009
6:00
22.45
1/10/2009
14:00
29.20
3/10/2009
7:00
21.86
1/10/2009
15:00
26.79
3/10/2009
8:00
21.72
1/10/2009
16:00
29.53
3/10/2009
9:00
27.60
1/10/2009
17:00
29.20
3/10/2009
10:00
28.54
1/10/2009
18:00
29.20
3/10/2009
11:00
29.27
1/10/2009
19:00
22.54
3/10/2009
12:00
29.90
1/10/2009
20:00
23.67
3/10/2009
13:00
29.90
1/10/2009
21:00
24.08
3/10/2009
14:00
30.11
1/10/2009
22:00
24.24
3/10/2009
15:00
32.58
1/10/2009
23:00
23.53
3/10/2009
16:00
30.11
2/10/2009
0:00
23.53
3/10/2009
17:00
29.90
2/10/2009
1:00
23.53
3/10/2009
18:00
29.20
2/10/2009
2:00
21.72
3/10/2009
19:00
24.35
2/10/2009
3:00
21.72
3/10/2009
20:00
27.84
2/10/2009
4:00
21.72
3/10/2009
21:00
27.90
2/10/2009
5:00
23.53
3/10/2009
22:00
24.21
2/10/2009
6:00
23.53
3/10/2009
23:00
24.04
2/10/2009
7:00
23.53
4/10/2009
0:00
23.95
2/10/2009
8:00
23.89
4/10/2009
1:00
21.72
2/10/2009
9:00
24.91
4/10/2009
2:00
22.53
2/10/2009
10:00
28.54
4/10/2009
3:00
22.53
2/10/2009
11:00
29.20
4/10/2009
4:00
22.53
2/10/2009
12:00
29.53
4/10/2009
5:00
22.58
2/10/2009
13:00
29.53
4/10/2009
6:00
22.53
2/10/2009
14:00
29.79
4/10/2009
7:00
22.55
2/10/2009
15:00
28.78
4/10/2009
8:00
23.56
2/10/2009
16:00
29.35
4/10/2009
9:00
23.60
2/10/2009
17:00
28.90
4/10/2009
10:00
28.54
2/10/2009
18:00
25.23
4/10/2009
11:00
28.90
2/10/2009
19:00
23.45
4/10/2009
12:00
29.27
A-5
Date
Time
Deg C
Date
Time
Deg C
DD/MM/YYYY
hh:mm
Average Air Temp
DD/MM/YYYY
hh:mm
Average Air Temp
4/10/2009
14:00
30.11
6/10/2009
7:00
22.78
4/10/2009
15:00
30.11
6/10/2009
8:00
23.64
4/10/2009
16:00
30.11
6/10/2009
9:00
27.96
4/10/2009
17:00
29.90
6/10/2009
10:00
29.53
4/10/2009
18:00
27.60
6/10/2009
11:00
30.12
4/10/2009
19:00
24.04
6/10/2009
12:00
30.11
4/10/2009
20:00
23.53
6/10/2009
13:00
32.73
4/10/2009
21:00
21.72
6/10/2009
14:00
30.11
4/10/2009
22:00
23.53
6/10/2009
15:00
30.11
4/10/2009
23:00
21.72
6/10/2009
16:00
25.32
5/10/2009
0:00
22.53
6/10/2009
17:00
29.04
5/10/2009
1:00
22.58
6/10/2009
18:00
24.56
5/10/2009
2:00
22.58
6/10/2009
19:00
23.09
5/10/2009
3:00
22.58
6/10/2009
20:00
23.95
5/10/2009
4:00
22.58
6/10/2009
21:00
23.95
5/10/2009
5:00
22.58
6/10/2009
22:00
23.53
5/10/2009
6:00
22.58
6/10/2009
23:00
23.95
5/10/2009
7:00
22.53
7/10/2009
0:00
23.53
5/10/2009
8:00
24.04
7/10/2009
1:00
23.53
5/10/2009
9:00
27.96
7/10/2009
2:00
22.53
5/10/2009
10:00
29.27
7/10/2009
3:00
22.53
5/10/2009
11:00
29.53
7/10/2009
4:00
22.58
5/10/2009
12:00
29.90
7/10/2009
5:00
21.65
5/10/2009
13:00
32.58
7/10/2009
6:00
21.65
5/10/2009
14:00
30.11
7/10/2009
7:00
22.67
5/10/2009
15:00
29.53
7/10/2009
8:00
23.68
5/10/2009
16:00
28.54
7/10/2009
9:00
24.52
5/10/2009
17:00
27.96
7/10/2009
10:00
28.21
5/10/2009
18:00
24.91
7/10/2009
11:00
27.98
5/10/2009
19:00
23.40
7/10/2009
12:00
27.88
5/10/2009
20:00
24.04
7/10/2009
13:00
27.97
5/10/2009
21:00
23.53
7/10/2009
14:00
28.90
5/10/2009
22:00
21.72
7/10/2009
15:00
28.54
5/10/2009
23:00
21.72
7/10/2009
16:00
29.20
6/10/2009
0:00
22.53
7/10/2009
17:00
29.08
6/10/2009
1:00
22.58
7/10/2009
18:00
25.45
6/10/2009
2:00
22.58
7/10/2009
19:00
22.46
6/10/2009
3:00
22.58
7/10/2009
20:00
21.65
6/10/2009
4:00
22.58
7/10/2009
21:00
21.86
6/10/2009
5:00
21.65
7/10/2009
22:00
20.56
A-6
Appendix 2. MATLAB Source Code
% Neural Network Program to predicted the average air temperature from
% 28 September to 7 October
% Create Network
numHiddenNeurons = 30; % The number of Hidden Neurons that will be used in
the network
net = newff(p,t,numHiddenNeurons);
% Division of Samples
% Allocation of the number of samples data for Training, Validation and
Testing
net.divideParam.trainRatio = 0.60; % Adjust as desired
net.divideParam.valRatio = 0.20; % Adjust as desired
net.divideParam.testRatio = 0.20; % Adust as desired
% Random Seed for Reproducing NFTool Results
rand('seed',26389783.000000)
net = init(net);
% Train Network
[net,tr] = train(net,p,t);
% Simulate Network
[trainOutput,Pf,Af,E,trainPerf] =
sim(net,p(:,tr.trainInd),[],[],t(:,tr.trainInd));
[valOutput,Pf,Af,E,valPerf] = sim(net,p(:,tr.valInd),[],[],t(:,tr.valInd));
[testOutput,Pf,Af,E,testPerf] =
sim(net,p(:,tr.testInd),[],[],t(:,tr.testInd));
% Display Performance
fprintf('Train vector MSE: %f\n',trainPerf);
fprintf('Validation vector MSE: %f\n',valPerf);
fprintf('Test vector MSE: %f\n',testPerf);
% Plot Regression
figure
postreg({trainOutput,valOutput,testOutput}, ...
{t(:,tr.trainInd),t(:,tr.valInd),t(:,tr.testInd)});
A-7