+= 0 - Learncivil.in

Dynamics of multi degree of freedom system
Dynamics degree of freedom:-
Dynamic degrees of freedom are a set of independent displacements/rotations that completely define the displaced position of the mass with respect to its initial position.
Examples:
• A vertical cantilever with the mass concentrated at its tip can be idealised as a single degree of freedom (SDOF) system. The degree of freedom is represented by the lateral displacement u of the mass.
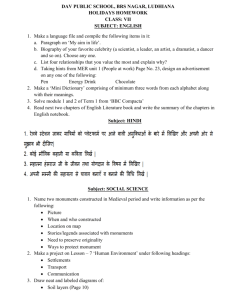
• A multi-storey frame with the masses concentrated the storey levels can be idealised as a multi degree of freedom (MDOF) system. The degrees of freedom are the lateral displacements of the storey masses. The system in the next figure has 4 dynamic degrees of freedom – displacements u1 – u4.
Equation of motion for multi degree of freedom:-
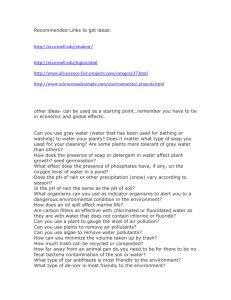
Let consider two degree of freedom model shown in figure.
Fig. shows two “roller scates” with the masses m
1
& m
2
and, moving in the same direction on a smooth horizontal plane.
x
1
(t) and x
2
(t) are measured from the statistical equilibrium position of the masses. Springs and dampers are assumed to be linear. Then, any static force disappears from the dynamic equations of motion.
Masses are cut free from the springs and dampers. External dynamic loads and internal spring and damper forces are applied to the free masses with the signs shown on Fig. 1. Newton’s 2nd law of motion is applied to each of the free masses: m
1 𝑥̈
1
= -k
1 x
1
+ k
2
(x
2
-x
1
) – c
1 𝑥̇
1
+c
2
( 𝑥̇
2
– 𝑥̇
1
) + F
1
(t) m
2 𝑥̈
2
= -k
3 x
2
- k
2
(x
2
-x
1
) – c
3 𝑥̇
1
- c
2
( 𝑥̇
2
– 𝑥̇
1
) + F
2
(t)
In general equation of motion:-
M 𝑥̈ + C 𝑥̇ + Kx = F(t) ,
t
>0
X(t) = [ 𝑥1(𝑡) 𝑥2(𝑡)
] , F(t) = [
𝐹1(𝑡)
𝐹2(𝑡)
]
M = [ 𝑚1 0
0 𝑚2
] , C = [ 𝑐1 + 𝑐2 −𝑐2
−𝑐2 𝑐2 + 𝑐3
] , K = [ 𝑘1 + 𝑘2 −𝑘2
−𝑘2 𝑘2 + 𝑘3
]
X(t) : Displacement vector.
F(t) : Dynamic load vector.
M : Mass matrix.
C : Stiffness matrix.
K : Damping matrix.
For free vibration:-
[𝑀][𝑥̈] + [𝐾][𝑥] = 0
EIGEN VALUE PROBLEM:- let the equation of motion of free undamped vibration which has a gernalised solution as follow- equation of motion [𝑀][𝑥̈] + [𝐾][𝑥] = 0 solution:- x i
=A i sin(wtα ) where - x i
= displacement of structure i th mass
A i
= amplitude
w = natural frequency of the mass so, 𝑥̈ = -A
1 w 2 sin(wt-
α
) then eqn. [ [𝐾] -w 2 [𝑀] ][𝐴] = 0
[𝐾] -w 2 [𝑀] = 0 , [𝐴] ≠ 0 the solution of the above linear equation gives n no. of natural frequency . and the value of vector [𝐴] shows the different modes of shape.
For stable system with symmetric and positive definite stiffness and mass matrices the
Eigen values will always be real and positive. For eigenvalue the resulting synchronous motion has a distinct shape and is known as NORMAL/NATURAL MODE SHAPE. .
Solution of dynamic equation of motion:-
Approximate method
RAYLEIGH’S METHOD:-
This method is based on the law of conservation of energy. In this method the energy of the system is remain constant during vibration. By this method we can find the natural frequency of the system without deriving the equation of motion. The accuracy of the solution depends on how close the assumed deformation of the system is close to actual shape of the structure during vibration.
For a free undamped system:-
Kinetic energy of the system = ½ [𝑀][𝑥]̇
2
Potential energy of the system = ½
[𝐾][𝑥]
2
Total energy :- ½ [𝑀][𝑥]̇
2 +
½
[𝐾][𝑥]
2
= constant
On differentiating
[𝑀][𝑥̈] + [𝐾][𝑥] = 0
If x=Asin(wt) 𝑥̇ =Awcos(wt)
So, (K.E.)
MAX
= (P.E.)
MAX
½mA 2 w 2 = ½KA 2 w 2 =
[𝐴]
′
[𝐴] ′
[𝐾][𝐴]
[𝑚][𝐴]
(in generalised form)
w 2 is known as Rayleigh quotient 𝜌 . holzer’s method:-
It is essentially a systematic tabulation of the frequency equation of the system.
The method assumes a trial frequency. A solution is found when the assume frequency satisfies the constraints of the problem. Usually, this requires several trails. Depending upon trail frequency employed, the fundamental and harmonic frequency can be determined. The tabulation also gives the mode shape of the system. We shall illustrate the method for an undamped semidefinite system.
Consider a three DOF semidefinite system shown in the Fig . the equation of motion are as follow:-
m
1 𝑥̈
1
+ 𝑘 m m i
2 𝑥̈
2
+ 𝑘 𝑥̈ i
+ 𝑘
1
1
( 𝑥
( 𝑥 i-1
( 𝑥
1
– 𝑥
2
– 𝑥 i
– 𝑥
1
2
) = 0
) + 𝑘 i-1
) + 𝑘
2
( 𝑥 i
( 𝑥 i
2
– 𝑥
– 𝑥
3
) = 0 i+1
) = 0
……………………………………….
………………………………………. m n 𝑥̈ n
+ 𝑘 n-1
( 𝑥 n
– 𝑥 n-1
) + 𝑘 n
( 𝑥 n
– 𝑥 n+1
) = 0 let the solution x i
= A i 𝑥̇
I
= A i sin(pt)
p sin(pt) 𝑥̈
I
= A i
p 2 sin(pt) m m m i
1
2
A
A
1
2 p p
𝐴 i p
2
2
2
+
+ 𝑘 𝑘
+ 𝑘
1
( 𝐴
1
( 𝐴 i-1
2
1
– 𝐴
– 𝐴
( 𝐴 i
1
2
) = 0
– 𝐴
) + 𝑘 i-1
) +
2
( 𝐴 𝑘
2
– 𝐴 i
( 𝐴
3
) = 0 i
– 𝐴 i+1
) = 0
……………………………………….
………………………………………. m n
𝐴 n p 2 + 𝑘 n-1
( 𝐴 n
– 𝐴 n-1
) + 𝑘 n
( 𝐴 n
– 𝐴 n+1
) = 0
𝐴
𝐴
2
= 𝐴
3
= 𝐴
1
– p 2 (m
2
– p 2 (m
1
1
A
A
1
1
)/k
1
+ m
2
A
2
)/k
2
𝐴 i
= 𝐴 i-1
– p 2 ( ∑ 𝑖−1 𝑖=1 mA )/k i-1
……………………………………………..
……………………………………………..
𝐴 n
= 𝐴 n-1
– p 2 ( ∑ 𝑛−1 𝑖=1 mA )/k n-1
P = frequency of the system
To begin the tabulation, assume a trail frequency p and let A
1 and calculate A
2
,A
3
......A
n
. Their value will satisfies the equation
∑
𝑛 𝑖=1
𝑚𝐴𝑝 = 0
= 1, arbitrarily,
I f not satisfies, a new value of p is assumed and the process repeated.
Force vibration of an undamped system:-
Consider the system shown in which one of the masses is subjected to study state with sinusoidal excitation. The equation of motion is given by-
Substituting in equations -
If the frequency of the system coincide with to the natural frequency of the individual mass system, then lower term of the amplitude demolish and become zero and amplitude get infinite,, which cause demolish of the structure.
The frequency at which the amplitude get infinite is known as RESONANCE
FREQUENCY.
So minimization of the response the shock absorbers are design for the minimum displacement frequency known as critical frequency.
In fig critical frequency w c
= 1
Dynamics of soils and seismic response
Soil dynamics involve the estimation of dynamic soil properties and the study of the behaviour of various type of soil under dynamic loads.
Owing to unpredictable ground motion during an earthquake, footing may settle, soil may liquefy and lose the ability to support the structure, and light structure may float.
Ground response analysis is used for the following:-
1.
To predict ground motion for development of design response spectra.
2.
To evaluate dynamic stresses and strain for the evaluation of liquefaction hazards.
3.
To determine the earthquake- induced forces.
Dynamic behaviour of soil:-
Soil behaviour under dynamic loading depends on the strain magnitude, the strain rate, and the no of loading cycles. It can be discussed in the following section.
1.
Settlement of dry sands:-
Lose sands can get compacted under vibration and causes settlement. The sands with relative density D r
below 60% or standard penetration resistance below 15 are susceptible to significant settlement.
A simple method to predict settlement consist of determine the critical void ratio, e cr
, above which a granular soil deposit will compact when vibrated and comparing it with the void ration, e, of the stratum. If the void ratio of the stratum is greater than the critical void ratio, the maximum amount of possible settlement can be determined by
∆𝐻 = 𝑒 𝑐𝑟
− 𝑒
1 − 𝑒
𝐻
Where 𝐻 is the depth of the stratum. The critical void ratio is given by 𝑒 𝑚𝑖𝑛 𝑒 𝑐𝑟
= 𝑒 𝑚𝑖𝑛
+ (𝑒 𝑚𝑎𝑥
= minimum possible void ratio, 𝑒 𝑚𝑎𝑥
= maximum possible void ratio
A = amplitude of applied acceleration
− 𝑒 𝑚𝑖𝑛
)𝑒
[−0.75
𝑎 𝑔
]
Limitation of this method is that the effect of factors such as confining pressure and no of cycles is ignored.
2.
Liquefaction of saturated cohesion soils:-
Under earthquake loading, some soils may compact; increasing the pore water pressure and causing a loss in shear strength, and behave like liquid mud. This phenomenon is generally referred to as LIQUEFACTION. Liquefaction can occur at some depth causing an upward flow of water. Gravel and clay are not susceptible to liquefaction. If liquefaction is likely to be a hazard, the use of deep foundation or piling may be necessary in order to avoid unacceptable settlement or foundation failure during an earthquake.
THEORY OF LIQUEFACTION:-
In saturated state, the strength of soil may be expressed as
Where 𝑆 = shear strength
𝑆 = (𝜎 𝑛 𝜎 𝑛
= normal stress at depth Z 𝑢 = pore pressure
− 𝑢) tan ∅
∅ = angle of internal friction
With the development of the additional positive pore pressure, the strength of the sand reduces. For a complete loss of soil strength 𝛾 𝑏
𝑍 = 𝛾 𝑤 ℎ′ 𝑤
Where 𝑆 𝑠 ℎ′ 𝑤
= 𝛾 𝑏
=
𝑍 𝛾 𝑤
= specific gravity of soil solids
𝑆 𝑠
− 1
1 + 𝑒
= 𝑖 𝑐𝑟
𝑖 𝑐𝑟
= critical hydraulic gradient
Lose of soil strength occurs due to the transfer of intergranular stress from the grains to the pore water. Since the stress condition is cyclic, the structure may settle if the stress transfer from the soil grains to pore water is partial and will sink if the soil is completely liquefied. Thus, as soon as liquefaction occurs, the process of consolidation starts, followed by surface settlement, which result in closer packing of sand particles. During this process, the pore water starts dissipating and, in the field, water flows only upwards. The upward seepage forces as a result of the flow may further reduce the effective stresses. This may cause liquefaction in the layers that were not liquefied initially.
To reduce the possibility of liquefaction, the following measures can be considered.
(a) Increase the relative density of the sands by compaction.
(b) Replace the soil with the soil that has a less likelihood of liquefaction.
(c) Install drainage equipment in ground.
(d) Drive piles into the layer that is less liable to liquefaction.
Forces affecting liquefaction characteristics:-
1.
Grain size distribution of the sand
2.
Initial relative density
3.
Vibration characteristics
4.
Location of drainage and dimension of deposits
5.
Magnitude and nature of superimposed loads
6.
Method of soil formation
7.
Period under sustained load
Dynamic design parameter of soils:-
(a) Shear modulus:-
For small strains, the shear modulus of soil can be taken as the mean slope of the stress strain curve. At large strain, the stress strain curve becomes markedly non-linear, so that the shear modulus is far constant but dependent on the magnitude of the shear strain.
LOWER STRAIN
LOWER DAMPING
HIGHER MODULUS
HIGHER STRAIN
HIGHER DAMPING
LOWER MODULUS
1
𝐷𝑎𝑚𝑝𝑖𝑛𝑔 𝑟𝑎𝑡𝑖𝑜 =
4𝜋
∗ 𝑎𝑟𝑒𝑎 𝑜𝑓 ℎ𝑦𝑠𝑡𝑒𝑟𝑒𝑠𝑖𝑠 𝑙𝑜𝑜𝑝 𝑎𝑟𝑒𝑎 𝑜𝑓 𝑡𝑟𝑎𝑖𝑛𝑔𝑙𝑒 𝐴𝑂𝐵
The shear modulus measured from the wave velocity corresponds to 10 -5 to
10 -4 . In field test, we concentrating on finding the shear velocity V s
and calculating the shear modulus G from the relationship
𝐺 = 𝜌𝑣 𝑠
Where 𝜌 = mass density of soil.
2
Shear strain developed during earthquake may increase by about 10 -3 % during small earthquake to 10 -1 % during large-scale vibration, and the maximum strain in each cycle will be different. For earthquake resistance design purposes, a value of two-third the G measured at the maximum strain developed may be used.
Alternatively, an appropriate value of G can be calculated from the relationship
𝐺 =
𝐸
2(1 + 𝑣)
Where E= young’s modulus
V = poisson’s ratio
Damping:-
Two fundamentally different damping phenomena are associated with soils- material damping and radiation damping.
Material damping:--
When a vibrational waves asses through the soil, it experiences material or internal damping. It can be considered as a measure of loss of vibration energy resulting primarily from hysteresis in the soil. Since in the most cases the strain level experienced during earthquake ranges from 10 -5 to 10 -1 , damping as high as
10% and 16% for clay and sand, respectively, can be expected during an earthquake.
Radiation damping:-
Radiation damping is a measure of the energy loss from the structure through the radiation of waves away from the footing. This is purely geometric
effect. There is no convenient method to measure radiation damping of the soil in the field.
Soil- structure interaction:-
The pattern of structural damage is directly related to the depth of soil alluvium overlying the bedrock, which in turn is directly related to the period of vibration of soil. Considering shear waves travelling vertically through a soil layer of depth 𝐻 , the period of horizontal vibration of the soil is given by
𝑇
𝐻
=
Where n is an integer and 𝑣 𝑠
4𝐻
(2𝑛 − 1)𝑣 𝑠
is the velocity of the shear wave.
The nature of sub soil may influence the response of the structure in the following three ways.
1.
The phenomenon of soil amplification may occur, in which the seismic excitation at the bed rock is modified during transmission through the overlying soils to the foundation. This may cause attenuation.
2.
The fixed base dynamic property of the structure may be significantly modified by the presence of the soils overlying the bed rock. This will include changes in the mode shape and period of vibration.
3.
A significant vibration of a flexibly supported structure may be dissipated by material damping and radiation damping in the supporting medium.
The behaviour of the structure depends partly on the nature of the supporting soil, and similarly the behaviour of stratum is modified by the presence of the structure.it follows that soil amplification will also be influenced by the presence of the structure, as soil- structure interaction effects a difference between the motion at the base of the structure and the free field motion which would have occurred at the same point in the absence of the structure. Owing to the difficulties involved in making dynamic analytical model of the soil system, it has been a common practice to ignore soil-structure interaction effects, simply by treating structures as if they were rigidly based, regardless of the soil condition.
CONNCEPTUAL DESIGN:-
While conceiving a new construction project, an architect or designer should give through thought to the form, shape and material of the structure, as well as the functional and the cost requirement, to avoid the critical failure during an earthquake. The basic factor contributing the proper seismic behaviour of a building, in a rational conceptual design of the structural system, is simplicity, symmetry of the building, ductility, and transfer to the lateral loads to the ground without excessive rotation. The behaviour of a structure during a earthquake depends largely on the form of the superstructure and on how the earthquake forces are carried to the ground. For this reason the overall form, regular configuration, floe of loads, and the framing system of building may be of serious concern if not taken care of in the first stage of the planning.