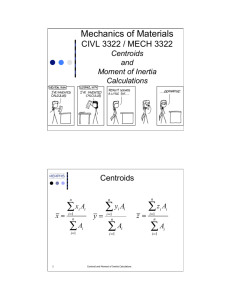
Measuring Mass Moment of Inertia as a Simple Pendulum

Notes_07_03 1 of 6
Measuring Mass Moment of Inertia as a Simple Pendulum
m = mass
J
G
= mass moment about centroid a = distance from pivot to centroid
P a
P
F
12 y
F
12 x g = acceleration of gravity
= time period for one oscillation
M
m g about sin
P
a
CCW
J
G
m a
2
J
G
m a
2
m g a sin
0
G m g sin
mg
G
for small angles
15
, sin
J
G
m a
2
m g a
0 assume
( J
G
4
2 f
m
2
( J
G
a 2 )
MAX m
MAX a
2
) cos(
2 cos( 2
m
g f a t ) f t )
m
MAX g a
2
MAX f sin( 2
cos( 2
using
1 / f
J
G
m a
2 m g a
2
4
2
2 x 4 x 24 from Notes_07_01 J
G
= 111.9 lbm.in
2 f f t ) t )
0
MAX
4
2 m = 2.286 lbm a = 12.25 in 20
= 25.74
sec
= 1.2870
sec m g
4 a
2
2
2 .
286
4
2 lbm
386 sec
2 in
12 .
25 in
1 .
2870 ma
2
= (2.286 lbm)(12.25 in)
2
= 343.04 lbm.in
2 sec
2 = 453.52
lbm.in
2
J
G
= 110.48
lbm.in
2 (-1.2
% difference) f
2 cos( 2
f t )
Notes_07_03 2 of 6
Measuring Mass Moment of Inertia with Torsional Pendulum
Torsional pendulums use a lightweight circular or triangular platform suspended from three light cables as shown below. The platform must be horizontal and the cables must be of equal length.
The cables should be attached to the platform equidistant from the center of the platform in an equilateral triangular pattern. Cable attachments need not be at the edge of the platform.
The object should be placed with its center of mass directly over the center of the platform. The centroidal axis of the object must be vertical. The platform must oscillate in pure rotation with small angular displacement about the central vertical axis and must not swing laterally.
This procedure should be used first with an empty platform to determine the mass moment of the platform alone and then repeated with the object centered on the platform to measure the mass moment of the object plus the platform.
Reference : Shigley, J.E. and J.J. Uicker, Theory of Machines and Mechanisms
McGraw-Hill, 1995, second edition
J
GO
J
GP
g
m
O
4 s m
P
2
r
2 2
J
GO
= centroidal polar mass moment of inertia of object
J
GP
= centroidal polar mass moment of inertia of platform
g = acceleration of gravity
m
O
= mass of object
m
P
= mass of platform r = radius of cable attachments from center of platform
(not platform radius)
= time period for one torsional oscillation
s = length of cables r small torsional oscillation
s
Notes_07_03 3 of 6
Measuring Mass Moment of Inertia with Platform Pendulum
Platform pendulums use a lightweight rectangular platform suspended from four light cables as shown below. The platform must be horizontal and the cables must be of equal length. Cable attachments need not be at the edge of the platform. Pendulum design should minimize a
O
to maximize accuracy.
The object should be placed with its center of mass directly over the center of the platform. The centroidal axis of the object must be horizontal. The platform must swing laterally with small displacement about the centerline of the cable pivots and must not twist or swing axially.
This procedure should be used first with an empty platform to determine the mass moment of the platform itself and then repeated with the object centered on the platform to measure the mass moment of the object plus the platform.
Reference : Mabie, H.H. and C.F. Reinholtz, Mechanisms and Dynamics of Machinery,
Wiley, 1987, fourth edition
J
GO
m
O a
2
O
J
P
g
m
O a
O
4
m
P a
P
2
2
J
GO
= centroidal polar mass moment of inertia of object
J
P
= polar mass moment of inertia of platform
g = acceleration of gravity
m
O
= mass of object
m
P
= mass of platform
a
O
= distance from pivot to centroid of object
a
P
= distance from pivot to centroid of platform
= time period for one oscillation a
O a
P
Notes_07_03 4 of 6
Measuring Mass Moment of Inertia and Centroid Location Simultaneously
Small objects
1) Suspend object by point P
1
and measure
2) Suspend object by point P
2
and measure
1
2
3) Measure m
ID
C
P
1
C a
1 4) Measure distances e, ID
B
, ID
C
J
G
J
G
m a
1
2
m a
2
2
m g a
1
4
2
1
2 m g a
2
4
2
2
2
4
2
a
1
2 a
2
2
g a
1
1
2 g a
2
2
2 a
2
e
a
1 a
2
2 e
2
2 ea
1
a
1
g e
1
g
2
2
2
2
2
4
2
8
e
2 e
BG
a
2
ID
B
/ 2 CG
a
1 a
1
2
ID
C
/ 2
ID
B
G
B
P
2 a
2 e
Suspended objects
1) Suspend object by point P
1
and measure
2) Suspend object by point P
2
and measure
1
2
3) Measure m
4) Measure distance f a
2
f
a
1 a
2
2 a
1
g f
1
2
g
2
2
2
2
4
2 f
8
2 f f
2
2 f a
1
a
1
2 a
2
P
2 f a
1
P
1
Notes_07_03 5 of 6
Measuring Mass Moment of Inertia and Centroid using Multiple Pivots
P
1
P
2 a
1 a
2
G y a n x
P n
1) Suspend object by points P
1
, P
2
, , P n
and measure
1
,
2
, ,
n
. All points on same body.
' Pn
2) Measure local coordinates
x y
' P 1 x
,
y
' P 2
, ,
x
y
3) Weigh the object to measure m
J
G
m a i
2 m g a
4
i
2
i
2 a i
2
x '
Pi x '
G y '
Pi y '
G
2 iteratively solve for
x
y
J
'
'
G
G
G
using
J
J
G
G
ma ma
2
1
2
2
J
G
ma n
2
m
m g g a a
2
1
m
g a n
1
2
2
2
/ 4
2
/ 4
2
n
2
/
4
2
k
1
k
i
x '
G
m
2
a i
g q
T
1
2
1
q
T
/ 4
2
( x '
Pi a
x '
G i
)
i
y '
G
m
2 a i
g
1
2
/ 4
2
( y '
Pi a
y '
G i
)
Notes_07_03
1
2 n
/
/
/
x x x
'
'
' G
G
G
1
2 n
/
/
/
y '
y '
y '
G
G
G
1
1
1
% t_mult.m - test multiple point measurement of mass moment
% HJSIII, 09.04.11
clear
% constants m = 96; g = 1;
% experimental values for xg=8, yg=3, JG=2336
% x, y, t xyt = [ 12 2 19.894 ;
10 5 21.244 ;
14 5 20.039 ]; x = xyt(:,1); y = xyt(:,2); t = xyt(:,3); t2term = t.*t /4/pi/pi; n = length( t );
% initial estimate q = [ 0 ; 0 ; 0 ];
% loop for iter = 1 : 10,
% current estimates
xg = q(1);
yg = q(2);
JG = q(3);
% evaluate residuals
a2 = (x-xg).*(x-xg) + (y-yg).*(y-yg);
a = sqrt( a2 );
PHI = JG + m*a2 - m*g*a.*t2term ;
% Jacobian
par = -m * (2*a - g*t2term ) ./a;
JAC(:,1) = par .* (x-xg);
JAC(:,2) = par .* (y-yg);
JAC(:,3) = ones(n,1);
% update
q = q -inv(JAC)*PHI;
disp( q' ) end
6 of 6