Project 1 - University of Cincinnati
advertisement

Revisiting the Mars Surveyor Challenge
Andrew Stubblebine, Student Researcher, College of Engineering of Applied
Sciences, University of Cincinnati
Tejas Deshpande, Student Researcher, College of Engineering and Applied Sciences,
University of Cincinnati
Elad Kivelevitch, Assistant Professor, College of Engineering and Applied Sciences,
University of Cincinnati
ABSTRACT
The Mars Surveyor Challenge was introduced by MathWorks as a way to challenge
the community of algorithm developers by asking them to come up with a solution to
explore a set of given maps using five vehicles, called rovers. The challenge at hand
is to find an optimal strategy using MATLAB to explore as much of a map as
possible in a limited number of instructions, or ‘moves.’ This strategy can be used in
designing search algorithms for UAV’s or other surveillance vehicles in order to
perform searches more efficiently.
INTRODUCTION
In 1999, MathWorks, the company that develops MATLAB, created a competition
for their algorithm developer community called the Mars Surveyor Challenge (MSC)
[1]. The challenge was to develop the most efficient and effective solution that will
guide a team of rovers to explore a set of given maps in a limited number of steps.
The efficiency of the solution was defined by the time required to calculate the
solution and efficacy was defined as the percentage of map that was covered by the
rovers’ motion. The winning solution was a hard-coded solution [3], meaning that for
each map there was a single set of predefined instructions. As a result, this solution
was completely tailored to the maps given by MathWorks, but completely breaks
down when required to work with different maps, different rover group sizes, or
different map sizes.
The competition began and opened for submissions of the solution in early June,
1999. It was a collaborative competition, meaning that every solution submitted up
until certain checkpoints, were visible to all participants. This means that they could
build upon previously submitted solutions. The competition ended in July with over
1000 solutions submitted. The top solutions were all hardcoded solutions that were
obviously built on the same basic code structure. Some of the winning solutions can
be seen in Table 1 below. The contest lasted over 6 weeks and had hundreds of
people working towards a solution.
In this work, we revisit the MSC, but we add the possibility of new, randomly
generated maps, as well as maps of any size, any number of steps, and any number of
rovers. Newly developed algorithms should perform nearly as well as the existing
algorithms that were tailored to a given set of sample maps. The new algorithms
should outperform existing algorithms on randomly generated maps. It should be
scalable to any number of rovers, any size map, and any distribution of obstacles.
In order to further analyze the performance of the chosen algorithms, four additional
maps were designed and added to the original eight. These four maps use different
distributions of obstacles from the original eight to increase to variability of the
distribution and the versatility of the solution. The additional maps are denoted as
maps 9-12 and are included in a separate table directly below the first (Table 2).
Motivation
In the last few years, the number of uses for autonomous vehicles has increased
drastically. One of the main uses of autonomous vehicles is searching an area that is
either unknown or can be covered faster by a vehicle. Sometimes, one vehicle is not
enough to cover the area or will not do the job fast enough. That is why an important
research topic is cooperative wide-area search. This uses multiple vehicles to
cooperatively search an area faster than a single vehicle could. The most important
aspect of this topic is how the vehicles perform together, ensuring that they not only
just cover the area, but they do it with high efficiency.
The purpose of this research is to explore different alternatives to the current methods
of cooperative search algorithms. Application of this research to real life cooperative
UAV search methods would greatly increase the efficiency for search. In addition, the
solutions provided by this research take into consideration obstacle avoidance
methods. The obstacles simulated in this research have many different distributions;
they take into account random distribution of obstacles as well as designed placement
of obstacles. Using both of these techniques for obstacle distribution will ensure the
algorithm solutions will perform well for any type of distribution of obstacles.
Literature Survey
Many current methods for cooperative UAV search already exist. These methods are
typically implemented for specific goals or tasks. Two popular methods discovered
were a method known as flocking, as demonstrated by Crowther and Riviere [2], and
sweeping, put forward by Vincent and Rubin [4].
Flocking is a bio-inspired behavioral model that uses a rule-based logic system to
guide a group of rovers through maneuvers. There are five basic rules for deciding
how the vehicles flock together: cohesion, alignment, separation, evasion, and
migration. Most of these maneuvers relate to the combined center of mass of the flock
of rovers or UAVs. The first rule, cohesion, uses a certain area around each rover to
maintain relatively close proximity by aligning the vehicles towards a local mass
center. Alignment keeps the velocity vectors of each rover pointed approximately in
the direction of the average velocity vector. Separation ensures that the vehicles are
not running into each other and keep a safe distance from each other and the center of
mass of the rover grouping. Evasion makes sure the rovers can maneuver around
obstacles. Finally, Migration sets a waypoint for the vehicles’ center of mass to which
they will flock together.
Logic based solutions are typically easily scalable, which is one of the goals of this
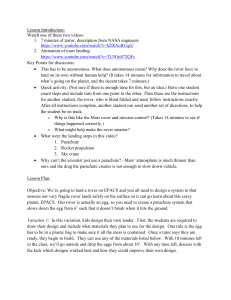
research. This method would work well for most maps. The main problem with
flocking, however, is that it would not be ideal for all maps, specifically a map with
small, organized rows as shown in Figure 1. If flocking were to be implemented on
this map, the rovers would attempt to go through the corridors between the walls.
Even with the current number of five rovers, this presents a problem. There are five
rovers and four spaces between the walls which means there will be one rover that is
essentially useless. Anytime a rover is not in use decreases the efficiency of the
solution and in this case there will always be at least one not in use. Moreover, for
each rover that is added beyond five, the efficiency of the solution will drastically
decrease.
Figure 1: Map 7 Layout
Sweeping is a tactic that uses similar concepts from flocking, such as cohesion and
migration, but in a very structured manner. A depiction of their action can be seen
below in Figure 2. The search vehicles will have the best efficiency using this method
if they start in a corner of the map. The rovers move horizontally until they reach the
boundary of the designed map area before turning to go down, then back the direction
they came, but in a different plane. This maneuver is much more orderly than the
flocking technique, which is not necessarily a good thing. This may force the vehicles
to behave in a way that may not be most efficient by forcing too many rovers into a
small location or if there are too many obstacles in a small section. In order for the
vehicles to continue efficiently, they would have to break their formation.
Figure 2 - Sweeping Motion
Another approach explored was the use of Genetic Algorithms to reach an optimum
solution. Genetic algorithms imitate nature in the form of natural selection and
evolution to reach an optimum solution to the given problem. Each solution is
encoded as a chromosome and a very large random population is generated at the
beginning. This large population undergoes the processes of selection, crossovers and
mutation over several generations or iterations and eventually we reach an optimum
solution to the given problem. One advantage of Genetic Algorithms is that they are
rather simple to conceptualize, but can be computationally inefficient.
Algorithm Selection
From investigating different methods currently used in cooperative UAV search, two
methods were chosen for use in this research: a rule-based algorithm and a genetic
algorithm. These two algorithms are vastly different and will provide two different
approaches to the solution. The rule-based algorithm uses a bottom-up approach,
looking at each individual decision as it is made by each vehicle and building the
entire set of instruction one at a time. If built correctly, the rule-based approach will
produce an emergent intelligent solution, akin to swarm intelligence. The genetic
algorithm uses a top-down approach, taking a population of solutions and
implementing different characteristics of genetic algorithms to converge on an
efficient solution. This solution runs globally on the entire set of instructions, or, for
computational reasons, large numbers of steps at a time.
For rule-based algorithms, the two methods found during literature survey, flocking
and sweeping, have their own advantages and disadvantages. Flocking is simple and
easily scalable but has restrictions on its maneuverability. Sweeping is simple and
methodological but has even more restrictions. The most optimal solution for
cooperative vehicle search for the purpose of this research, however, would be one
that implements portions of each of these methods. The current method being utilized
is one that takes the idea of logical, rule-based decisions from the flocking technique
and the order and starting from the outer edges from the sweeping technique. In
addition to these concepts from the preexisting methods, the rovers will make their
decisions independently but still communicate important information to each other.
The basic structure of all Genetic Algorithms is the same. It includes an initial
random population, a fitness indicator, a selection procedure, crossover procedure and
a mutation procedure. The ways in which this has been implemented is explained in
the next section.
Specifications
Rules Based Approach
Four rules were selected to guide the rovers’ decision making. The first, and most
significant, is to prioritize forward movement. There are four possible choices for
instructions: a 1 denotes a forward movement of one cell, a 2 indicates a turn to the
right, a 3 turns the rover to the left, and a 4 keeps the rover in place. Since the
objective of the algorithm is to efficiently search an area, any move other than a 1
decreases the efficiency of the solution. Therefore, if the rover can move forward, it
should.
Second, when encountering the path of another rover, the rover should turn left or
right and not continue through the path. Implementing this rule helps divide the map
into sections that each rover can efficiently cover, typically moving circularly inward
until the whole section is covered. An example of this is depicted in Figure 3. Each
rover turns when encountering the path of another rover. Moreover, the turn made by
each rover for this event creates sections for each rover, or sometimes two, that
enables each rover to cover the area efficiently with minimized obstruction from other
vehicles.
Figure 3: Sectioning of map by each rover
The third rule is to look beyond one square in all directions if a dead end is found. A
dead end is an area surrounding the rover that is either full or mostly full of obstacles,
or has been covered previously by another rover. Just because the closest
undiscovered square is one cell away that does not mean that it is a better option than
the open square 3 cells away. The undiscovered square 3 cells away may have many
other undiscovered cells near it, while the closer option may have far fewer open and
many more obstacles nearby. Moving to that area would further drop the efficiency of
the vehicle’s path. When exploring the local areas around the rover for undiscovered
spaces, the rover will start with a smaller field of vision. If it cannot make a good
decision based on what it “sees,” then it must expand its field of vision until the rover
can make a better decision.
The fourth and final rule is to communicate dead ends and undiscovered areas to the
other rovers. With this knowledge, the other rovers know that traveling towards a
section with many discovered solutions would not be advantageous, while travelling
towards an open area would be very advantageous. This means that if a rover passes
by a field of multiple undiscovered squares, it should communicate this information
to other rovers so they can potentially travel to it.
Genetic Algorithm Approach
Initial Population Generation: A population of 100 chromosomes is generated at
startup. In order to make the execution of the code more efficient, the population is
generated in for a ‘planning horizon’ of instructions. A ‘planning horizon’ is defined
as a certain number of instructions that is less than the total number of instructions
required for a complete solution. This ‘planning horizon based approach improves the
solution fitness without drastically increasing computational time. As the script starts,
an initial ‘horizon of instructions is randomly generated in the population. This
population then undergoes selection and mutation for a certain number of generations.
After this is completed, the best chromosome in the given population is selected, and
it is chosen as the building block for the new population which will have a greater
number of rover instructions. In this new population, the first ‘n’ instructions for each
rover in every member of the population are fixed to the best result previously
obtained by the GA. To this new population, a new planning horizon is appended.
Therefore, in this new population, the initial ‘n’ instructions for each rover are
identical in every member of the population, while the next horizon are randomly
generated.
While generating the population, certain steps are taken to ensure population
diversity. The probability that the instruction 1 (i.e. go straight) will occur is initially
set at the value of 0.9. The other instructions all have equal probability i.e. 0.05 each
for turning left and right. However, as the first 20% of the target population is
reached, the probability that the instruction 1 is selected decreases by 0.1.
Consequently, the probability of turning left and right increases by 0.05 each. This is
repeated every 20%.
Fitness Indicator: The fitness indicator used is a modification of the survey program
given by MATLAB for its competition. Instead of visualizing the solution, it just
returns a number which indicates the number of squares left unexplored by the given
instruction set.
Selection Procedure: After running some initial tests, it was noticed that
computational performance would be a rather critical factor. Based on that
consideration, a simple truncation procedure is used where the top 5 members of the
population are preserved and the remaining are all cleared. These cleared members of
the population are then replaced by new members which are the result of crossovers
between any two currently existing members selected by a random algorithm.
Crossover procedure: Keeping in mind the importance of minimizing computational
time, a simple two-point crossover is implemented. In this technique, a random
number is selected such that it is less than the total number of instructions. Then a
second random number is selected such that it is greater than the first random number
but less than the total number of instructions. The instructions that occur in between
these two are taken from parent two and the remaining are taken from parent one to
form the child chromosome.
Mutation Procedure: The procedure that is implemented chooses a random member of
the chromosome. It then proceeds to identify a random instruction which it mutates
with the following rule - add 1 to the number that represents the instruction. If it is
represented by 3, make it 1.
Based on simulations in which the algorithm is run with and without the mutation
procedure, the mutation procedure resulted in reduction of as much as 200 from the
not visited squares count.
Results
To compare the results of various algorithms in terms of their success to search a
wide area, there is a need to develop a metric that is scalable to any size of map and
any number of obstacles. The first step is to define how many possible grid cells
require searching, this is denoted by ‘Number of Open Spaces’, which is calculated
by:
𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑂𝑝𝑒𝑛 𝑆𝑝𝑎𝑐𝑒𝑠 = [𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑅𝑜𝑤𝑠] × [𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝐶𝑜𝑙𝑢𝑚𝑛𝑠] − [𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑜𝑏𝑠𝑡𝑎𝑐𝑙𝑒𝑠]
Out of this number, the best solution is the one that missed the smallest number of
spaces, which is the algorithm that won the original contest. We compare our result to
that algorithm using the metric ‘solution strength’ defined by:
𝑆𝑜𝑙𝑢𝑡𝑖𝑜𝑛 𝑆𝑡𝑟𝑒𝑛𝑔𝑡ℎ =
[𝑆𝑝𝑎𝑐𝑒𝑠 𝑀𝑖𝑠𝑠𝑒𝑑 𝑏𝑦 𝐴𝑙𝑔𝑜𝑟𝑖𝑡ℎ𝑚] − [𝑆𝑝𝑎𝑐𝑒𝑠 𝑀𝑖𝑠𝑠𝑒𝑑 𝑏𝑦 𝐵𝑒𝑠𝑡 𝑆𝑜𝑙𝑢𝑡𝑖𝑜𝑛]
𝑁𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑂𝑝𝑒𝑛 𝑆𝑝𝑎𝑐𝑒𝑠
× 100
Since it is the difference between the solutions, a lower percentage is better. This
equation evaluates the ability of the designed algorithm to find an efficient solution
on each map.
Map 1
Map 2
Map 3
Map 4
Map 5
Map 6
Map 7
Map 8
Map 1-8
Total
Open Spaces
2500
1850
1972
2500
2188
1702
2227
1961
16900
Winning Solution
Spaces Missed
106
0
24
239*
65
96
93
218
841
Rule-Based
Algorithm Spaces
Missed
250
3
462
315
120
369
435
763
2717
Rule-Based
Algorithm Strength
5.76%
.16%
22.21%
3.04%
2.51%
16.04%
15.36%
27.79%
11.1%
Genetic Algorithm
Spaces Missed
919
477
798
920
784
567
1078
811
6354
Genetic Algorithm
Strength
32.52%
25.78%
39.25%
27.24%
32.86%
27.67%
44.23%
30.24%
32.62%
Table 1: Solutions from each algorithm and their strength, based on the original contest solutions
Map 9
Map 10
Map 11
Map 12
Map 9-12
Total
Map 1-12
Total
Open Spaces
2059
2306
2385
2155
8905
25805
Winning Solution
Spaces Missed
1
749
439
470
1659
2500
Rule-Based
Algorithm Spaces
Missed
8
1362
462
502
2334
5051
Rule-Based
Algorithm Strength
0.34%
26.58%
0.96%
1.48%
7.58%
9.89%
Genetic Algorithm
Spaces Missed
660
1589
1042
1100
4391
10745
Genetic Algorithm
Strength
32.01%
36.43%
25.28%
29.23%
30.68%
31.95%
Table 2: Solutions from each algorithm and their strength, for the 4 new maps and the total for all 12 maps
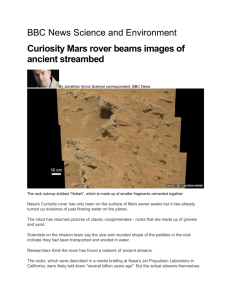
Undiscovered Spaces
Algorithm vs. Contest Solutions
1800
1600
1400
1200
1000
800
600
400
200
0
Rank #1 Soln
Rank #20 Soln
Rank #50 Soln
Rank #100 Soln
Rule-Based Soln
GA - 100
1
2
3
4
5
6
7
8
9
10
11
12
GA - 300
Map #
Figure 4: Number of undiscovered spaces for Genetic Algorithm compared to contest solutions and rule
based algorithm
To further analyze the performance of the rule-based solution, we compare it to a
sample of the solutions submitted in the original contest, namely the solutions ranked
#1, #20, #50, and #100. Figure 4depicts this comparison and shows that the solutions
taken from the contest perform better than the designed algorithm, but as stated
previously, the purpose of this research is not to outperform the solutions on these
maps. The purpose is to outperform the contest solutions on new maps. Out of four
maps, the rule-based algorithm is on par in three of the maps (#9, #11, #12) and does
not perform as well as the other solutions on map #10. This behavior was found in
the original eight maps as well, and there is a need to further investigate the reasons
why the rule-based solution produces good results for some maps while it is
underperforms on other maps. We suspect that the reasons have to do with its
relatively local and near-sighted decisions, which may lead to some vehicles
becoming stuck and inefficient.
Based on the coded solution, it is apparent that given infinite computational power
and time, an excellent if not perfect solution can be reached by the Genetic
Algorithm. However, we have limited time and computational power and as a result,
we have to set limits on the amount of computations that we will perform.
The results using the GA in the table below have been obtained by running the GA on
each map 20 times. Each time the GA was run, each ‘horizon’ of instructions went
through 250 generations of crossovers and mutations. The results given below are the
averages of the 20 runs performed.
Looking at the data presented in Figure 4 one can see that the GA consistently
performs almost as well as the Rule based algorithm on Map 8, which is significantly
more difficult to define rules for.
Further tests on Map 8 where the number of instructions in a ‘planning horizon’ was
10 and the number of generations was 250, the solutions produced left as little as 568
spaces unexplored. This however took close to 10 minutes to execute.
We now compare the performance the Genetic Algorithm with different planning
horizon values in Figure 5 and Figure 6.
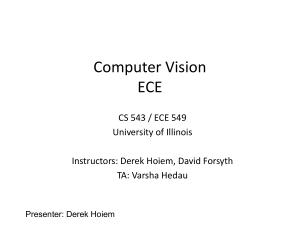
Performance of GA
1800
1600
1400
1200
1000
800
600
400
200
0
Map 1 Map 2 Map 3 Map 4 Map 5 Map 6 Map 7 Map 8 Map 9 Map 10 Map 11 Map 12
Instructions per 'horizon' : 100
Instructions per 'horizon' : 300
Figure 5: Comparison of fitness results using different ‘horizon’ values
Comparison of processing times for different
planning horizons
90
80
Time (sec)
70
60
50
40
30
20
10
0
Instructions per horizon : 100
Instructions per horizon : 300
Figure 6: Comparison of average time required for different ‘horizon’ sizes.
Based on data collected thus far, it can be noted that reducing the number of steps in
the planning horizon improves the strength of the solution, but at a significant
computational cost. However, if one knows the amount of time given for the
algorithm to run, it is possible to fit the planning horizon size accordingly to obtain
the best results from the GA.
Conclusions
The MATLAB Mars Surveyor Contest was revisited and two algorithms were
developed and evaluated using 8 original maps and 4 new maps. The developed
algorithms represent the two ends of the spectrum of possible search algorithms: the
Rule-Based Solution is a local, short-sighted, bottom-up approach, whereas the
Genetic Algorithm Solution is a global, top-down and long planning horizon
approach.
The Rule-Based algorithm produced results that were nearly as good as the original
competition solutions. As seen above, 7 out of the 12 total maps had a strength of
around 5% or less, indicating that the performance of the rule-based algorithm
produced results that were almost on par with the contest winners in the majority of
the cases. Yet, in some maps, the rules-based algorithm underperforms significantly,
possibly because of its myopic decision rules. Further investigation is required to see
if there is a way to improve this performance.
The GA solution is more computationally intensive. As a result, trying to maintain a
reasonable execution time causes the GA to underperform in most maps, except for
the hardest ones, where there is a clear need for the global and long-term decision
making that the GA offers.
Future Work
As stated above, the competition solutions performed relatively well on the new
maps, using a logic that seems to have similar characteristics of the designed, rulebased algorithm. Exploring the properties of the competition code and how it works
for the new maps may uncover new rules to implement for the rule-based code. In
addition, there is reason to believe that implementing fuzzy logic within the algorithm
would be able to make the solution more robust and provide even better solutions,
particularly by allowing a smooth combination of short term logic with longer term
planning.
After incorporating these new ideas into the current rule-based algorithm, it would be
reasonable to expect the new algorithm to perform even closer to the existing
competition winner for the original 8 maps and outperform the competition solution
in the new maps. This would also produce even better results if scaled up to more
than the original 5 rovers and/or larger maps. The implementation of these concepts
should provide the best, universal solution and perform better than nearly any other
solution of any kind.
A possible approach to improve results of the GA would be to implement a
computationally efficient guided mutation algorithm that will force the solution to
change whenever the rover goes into obstacles and out of the map.
After that, combining the rules based approach with the GA approach could be a
possibility. One could run the rules based algorithm to generate possible high-quality
solutions quickly, and add it to a large population of randomly generated solutions.
GA could then be executed on this new population to improve the quality of the
initial solution.
Finally, GAs can be used to improve a fuzzy logic search algorithm, by tweaking the
membership functions and the rules of the fuzzy inference system.
References
[1]
(1999). “Mars Surveyor – Rules – A MATLAB Programming Contest.”
MATLAB CENTRAL,
<http://www.mathworks.com/matlabcentral/contest/contests/4/rules> (Aug.
28, 2013).
[2]
Crowther, W. J., and Riviere, X. (2003). “Flocking of Autonomous Unmanned
Air Vehicles,” School of Engineering, University of Manchester, Manchester,
United Kingdom.
[3]
Uribe, P. (1999). MATLAB Competition Code,
<http://www.mathworks.com/matlabcentral/contest/contests/4/submissions/79
54> (Aug. 30, 2013).
[4]
Vincent, P. and Rubin, I. (2004). “A Framework and Analysis for Cooperative
Search Using UAV Swarms,” 2004 ACM Symposium for Applied Computing,
held at Nicosia, Cyprus, March 14-17.
{5]
"Genetic Algorithm Tutorial." Genetic Algorithm Tutorial. N.p., n.d. Web. 09
Oct. 2013.
[6]
Houck, Christopher R., Jeffery A. Joines, and Michael G. Kay. "A genetic
algorithm for function optimization: a Matlab implementation." NCSU-IE TR95.09
(1995).