Handout
advertisement

LAB 9: VIBRATION AND TILT
MEASUREMENTS
SPRING 2013
MENG 483L
Group#: XX
NAMES: XXXX, XXXX
OBJECTIVES
The objective of this laboratory exercise is to explore various applications of the accelerometer sensor. In
particular, vibration measurements are performed and the frequency response function of a metallic beam is
calculated. The same accelerometer can be used as a tilt sensor and serve as an inclinometer. Analog and digital
measurements will be made, allowing for comparison of the analog and digital data.
THEORETICAL BACKGROUND
VIBRATION MEASUREMENTS
A need for vibration analysis arises in many engineering applications. Two vibration parameters dominate practical
considerations: the amplitude and frequency of vibration. The amplitude of vibrations is presented in terms of
displacement, velocity, or acceleration, and the frequency is associated with the rate of change of these quantities.
In a typical time-domain vibration record, the amplitude is obtained as a difference between the maximum and the
minimum values of the signal, and the vibration frequency can be calculated from the period determined as a
distance between two neighboring amplitude peaks. In reality, a vibration record most likely will feature not just
one, but multiple frequencies and this simple analysis may not yield adequate results. Therefore, a detailed Fourier
analysis of a waveform is needed. This analysis can be accomplished either analytically using a Fourier integration
scheme, or numerically by employing the Fast Fourier transform (FFT). We will use the latter approach.
To determine the natural frequencies of a structural system one needs to excite it mechanically and measure a
response to the applied excitation. By exciting the system in a range of frequencies, it is possible to determine a
frequency dependent response or frequency response function – one of the main dynamic characteristics of a
structural system. To calculate a frequency response, it is necessary to know spectral density functions of the input
Syy and output Sxx signals and their cross-spectral densities Sxy, Syx. A Fast Fourier Transform is used to obtain the
spectral densities.
F1=fft(x);
F2=fft(y);
Sxy=F2.*conj(F1);
Sxx=F1.*conj(F1);
Syy=F2.*conj(F2);
Syx=F1.*conj(F2);
Lab 9, Group # XX, Names: XX, XX
MENG 483L
Where conj means a complex conjugate of a function.
After the spectral densities are determined, calculation of the frequency response function is straightforward.
H (i )
S yx ( )
S yy ( )
S xx ( )
,
S xy ( )
(1)
It should be noted that according to expression (1), two different paths can be followed to obtain H(iω). This fact
allows us to verify the adequacy of the measurement and calculation procedures. A coherence function can be
defined to quantify the noise contamination of the signal.
Coh
S xy ( )
2
S yy ( ) S xx ( )
,
(2)
For the signal containing a random noise, Coh = 0, the consistent measurements unaffected by noise will yield the
Coh value close to unity, i.e. 1.
WHAT DO FREQUENCY RESPONSE AND COHERENCE FUNCTIONS REPRESENT?
0.5 POINTS
CALCULATION OF NATURAL FREQUENCIES OF THE METALLIC BEAM
In the vibration measurements considered in this laboratory exercise, the aluminum 2024-T3 beam is employed.
Properties of the 2024-T3 aluminum are given below:
Modulus of Elasticity (E) = 73.1 GPa
Density (ρ) = 2.78 g/cc = 2780 kg/m3
The dimensions of the beam are as follows:
Length (l) = 11” = 27.94cm = 0.2794m
Width (b) = 1” = 2.54cm = 0.0254m
Height (h) = 1/10” = 0.254cm = 2.54e-3m
2
Lab 9, Group # XX, Names: XX, XX
MENG 483L
In the experimental setup, one end of the aluminum beam is clamped and the other end is free. Therefore, the
theoretical natural frequencies of the beam are calculated for the clamped-free boundary condition. Table 1
provides information on weighted natural frequencies (βnl ) and the characteristic equation for this type of
boundary conditions.
Table 1
Weighted natural frequencies and the characteristic equation for clamped-free Euler-Bernoulli beam.
Vibration Mode (n)
βnl and characteristic equation
0
1.87510407
1
4.69409113
2
7.85475744
3
10.99554073
4
14.13716839
for n>5
(2n - 1)*π/2
The natural frequencies of an Euler-Bernoulli beam are calculated using the following formula:
f n n2 EI A 2 ,
(3)
where A is the cross-section area (b∙l) and I is the area moment of inertia determined as:
I b h3 12
3
(4)
Lab 9, Group # XX, Names: XX, XX
MENG 483L
EQUIPMENT
CSM12D module (MCU)
Freescale Project Board
USB cable
RS-232 Serial cable (DB9 connector)
Microphone
2 1/2" Drill Press Angle Vise
Aluminum 2024-T3 beam
6.5” 15W Speaker
3k resistor
Protractor
LIS2L02AL accelerometer
Alligator clips
4
Lab 9, Group # XX, Names: XX, XX
MENG 483L
PROCEDURES
VIBRATION MEASUREMENTS
EXERCISE #1:
In this laboratory exercise you will be measuring a dynamic response of an aluminum beam to the applied impulse
excitation. The excitation is exerted using a speaker positioned underneath the beam. The response of the beam is
measured via the accelerometer attached to the beam. The input excitation signal is measured via a microphone
without an amplifier.
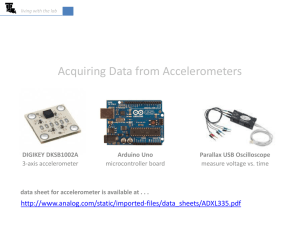
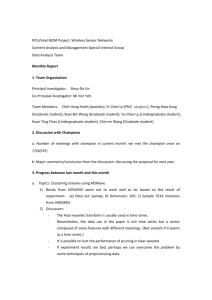
Figure 2.
Connect the microphone and the
accelerometer as shown in
J6
VAUX
GND
TXD0
RXD0
PP0/PWM0
PP1/PWM1
PT0
PT1
MOSI0
MISO0
SCK0
SS0
PA7
PA6
VAUX
GND
TXD0
RXD0
PP0/PWM0
PP1/PWM1
PT0
PT1
MOSI0
MISO0
SCK0
SS0
PA7
PA6
PA5
PA4
PA3
PA2
PA1
PA0
PB7
PB6
PB5
PB4
PB3
PB2
PB1
PB0
1
3
5
7
9
11
13
15
17
19
21
23
25
27
J6
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
41
43
45
47
49
51
53
55
57
59
2
4
6
8
10
12
14
16
18
20
22
24
26
28
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
50
52
54
56
58
60
+5V (dark blue)
PWM7
AN07
AN06
AN05
AN04
AN00
AN01
AN02
AN03
LIS2L02AL
Vo (light blue)
GND (white)
+5V
Red Head
PWM7
AN07
AN06
AN05
AN04
AN00
AN01
AN02
AN03
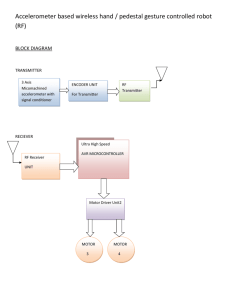
Figure 1 Connection of a speaker to the
amplifyer.
MIC
Black Head
3k
GND
PWM2
PWM3
PWM4
PWM5
RXD1
TXD1
PT2
PT3
PT4
PT5
PT6
PT7
5
Lab 9, Group # XX, Names: XX, XX
Figure 2
MENG 483L
Connection diagrams for the microphone and accelerometer.
Place the speaker as depicted in Figure 1, connect regular computer speaker to
the computer, connect the excitation (i.e. flat) speaker to the computer
speaker. The computer speaker serves as an amplifier of the excitation signal.
Place the microphone underneath the beam and use AN01 port to acquire the
data. You will be using a pulse generation VI discussed in Lab6. The input signal
supplied to the speaker is used to excite the beam and to trigger the data
acquisition.
Power up the LIS2L02AL accelerometer with 5 V available on board. The port
AN00 is used to acquire the accelerometer data. Illustration of an experimental
setup is given in Error! Reference source not found..
Please note that the frequency bandwidth of the LIS2L02AL is from 0.5 to 2500
Hz.
Figure 1 Connection of a speaker to the
amplifyer.
Open the Labview PulseGenerator.vi file. This program produces repetitive “clicks” on the speakers and provides a
digital trigger to tells the microcontroller when to capture data. Enable the trigger signal by connecting the Project
Board’s Digital I/O “DO 0” to PA0 (J6_39). In the VI menu select the Pulse frequency as 2000Hz, select the
shortest impulse length and maximum loudness.
The data acquisition program is given below. For new version CW5: go to the My Documents, rename the “Default”
folder as “Lab9”, go inside, rename CW file as “Lab9”. Double click on it to open. Copy and paste following code:
#include <hidef.h>
/* common defines and macros */
#include <mc9s12xdt512.h>
/* derivative information */
#include "csm12d.h"
#include <stdio.h> //standard I/O - requires termio.c in Sources
#include “termio.c” //function prototypes
#pragma LINK_INFO DERIVATIVE "mc9s12xdt512"
#define SIZE 1024
//data array size
/* interrupt service routines must go in NON_BANKED memory! */
#pragma CODE_SEG NON_BANKED
/* The following timer interrupt will trigger the ATD converter. */
/* You must connect timer Ch0 to ATD Ch7 with a wire. */
void interrupt 8 ATDtrigger(void) { // interrupt 8 is timer channel 0
TC0 = TC0 + 100;
// set ATD rate to 20kHz: 2MHz / 20kHz = 100
CFORC_FOC0 = 1; // toggle channel 0 back low
TFLG1_C0F = 1; // clear the interrupt
}
#pragma CODE_SEG DEFAULT
void main(void)
{
/* define variables */
6
Lab 9, Group # XX, Names: XX, XX
MENG 483L
unsigned int i, x[SIZE], y[SIZE];
/* Initialize variables and hardware here */
CSM12D_USER_Init();
DDRA = 0x00;
//configure Port A for input
TERMIO_Init();
//Configure serial communication
/* ATD init */
ATD0CTL1 = 0x07; //trigger on ATD ch7
ATD0CTL2 = 0x8C; //power up ATD converter, enable trigger
ATD0CTL3 = 2<<3; //do 2 conversions per sequence
ATD0CTL4_SRES8 = FALSE; //10 bit resolution
ATD0CTL4_PRS = 0; //set ATD clock
ATD0CTL5 = 0x90; //multiple channels, start at channel 0
/* timer init */
TSCR2_PR = 0;
// set prescaler - 2MHz clock
TSCR1_TEN = TRUE; // enable timer
TIOS_IOS0 = 1;
// configure channel 0 for output compare
TCTL2_OM0 = 0;
// these two lines configure channel 0 to toggle
TCTL2_OL0 = 1;
//
the output level on a successful compare
/* get data (data acquisition begins when trigger from VI */
/* is received on PA0) */
while (PORTA_PA0==0); //wait until the sound is played
TIE_C0I = TRUE;
// enable interrupt on channel 0
EnableInterrupts; // enable interrupts in general
for(i=0;i<SIZE;i++) {
while (!ATD0STAT1_CCF0); //wait until the conversion is complete
x[i] = ATD0DR0;
while (!ATD0STAT1_CCF1); //wait until the conversion is complete
y[i] = ATD0DR1;
}
printf("Open output file and press any key to transfer data\n");
getchar();
for(i=0;i<SIZE;i++) {
printf("%d, %d\n",x[i],y[i]);
}
for(;;);
/* please make sure that you never leave the main() function */
}
During this exercise, you may increase your volume slightly to get a good signal, but still keep your sound level
within reason. To collect the data, you will need to run the pulse generator first and then press the microcontroller
Start button immediately after you hear one of the clicks. The microcontroller should trigger on the next click and
print the “Open output file” message. The data transfer procedure is the same as in previous laboratory exercises.
Plot the data to see if you did indeed capture the pulse (occasionally there is a delay in the program and you may
miss the pulse). Verify if the pulse is visible on both channels. The Matlab script for fft, from lab 7, accomplishes
much of what will be necessary in the following questions.
7
Lab 9, Group # XX, Names: XX, XX
MENG 483L
Plot and analyze your signals. Run this experiment at least twice and do the followings:
1.
LOAD YOUR DATA IN MATLAB. YOU WILL HAVE 2 VECTORS: IN, OUT RESPECTIVELY. PLOT THE TIMEDOMAIN REPRESENTATION OF THESE SIGNALS.
0.5 POINT
2.
CALCULATE AND PLOT THE SPECTRUMS (I.E. FFT(SIGNAL)) OF THESE SIGNALS. THE MAXIMUM
FREQUENCY VALUE (X AXIS) IN YOUR PLOTS MUST NOT EXCEED 2KHZ (HINT: USE XLIM([0 2*10^3]) IN
MATLAB).
0.5 POINT
3.
CALCULATE SPECTRAL DENSITIES ACCORDING TO THE EXAMPLE GIVEN IN THE THEORETICAL SECTION.
1 POINT.
4.
USING EXPRESSION (1) CALCULATE THE FREQUENCY RESPONSE FUNCTIONS (FRF). PLOT YOUR FRFS.
1 POINT.
5.
CALCULATE NATURAL FREQUENCIES OF THE BEAM USING FORMULATIONS PRESENTED IN SECTION 2.2.
YOU SHOULD SEE THE NATURAL FREQUENCIES OF THE BEAM AS PEAKS IN THE FRF REPRESENTATION.
LOCATE THESE NATURAL FREQUENCIES AND COMPARE THEM TO THE CALCULATED NATURAL
FREQUENCIES. EXPLAIN THE DIFFERENCE BETWEEN VALUES OF CALCULATED AND MEASURED NATURAL
FREQUENCIES.
1 POINT.
6.
USING EXPRESSION (2) CALCULATE THE COHERENCE FUNCTION. WHAT ARE THE MAXIMUM AND
MINIMUM VALUES OF YOUR COHERENCE FUNCTION? WHAT DO THEY TELL YOU ABOUT CONSISTENCY
OF YOUR MEASUREMENTS?
1 POINT
WHY DO YOU NEED A TRIGGERING CIRCUIT TO START THE ACQUISITION OF THE VIBRATION DATA? 1 POINT
HOW DID YOU SELECT THE SAMPLE RATE FOR THE VIBRATION MEASUREMENTS?
8
1 POINT
Lab 9, Group # XX, Names: XX, XX
MENG 483L
ACCELEROMETER AS A TILT SENSOR
MEMS accelerometers can be used to determine an angle of tilt. This measurement is possible because the sensing
axis of an accelerometer resting on a tilted surface is not aligned with the vector of gravity, thus generating a
voltage output nonlinearly proportional to the angular difference between these two vectors. In this laboratory
exercise we will only measure the tilt with respect to the y-axis. The LIS2L02AL accelerometer has a sensitivity of
1000 mV/g, which is sufficient for tilt applications.
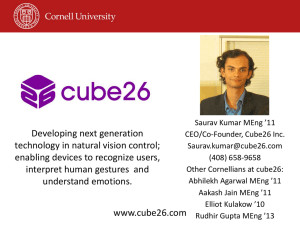
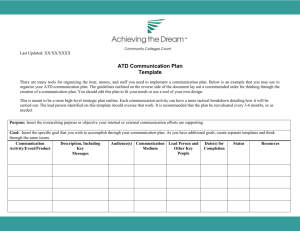
Angle vs. Output Voltage
4
Output Voltage
3.5
3
2.5
2
1.5
0
15
30
45
60
75
90
105
120
135
150
165
180
Angle (degrees)
Figure 3
Nonlinearity of the accelerometer output in the tilt application.
Nonlinearity of the accelerometer:
As it can be seen in Figure 3, a typical output of a MEMS LIS2L02AL accelerometer resembles a sine function. The
figure shows the analog output voltage of the accelerometer covering the tilt angles from 0° to 180°. The change of
the tilt directly corresponds to a change in the acceleration due to gravity acting on the accelerometer. The slope
of the curve is the sensitivity of the device.
DRAW AND DISCUSS SCHEMATICS OF THE TILT EXPERIMENT. USE THREE ANGLES (0, 30, AND 90 DEGREES) TO
SHOW THE ALIGNMENT OF THE ACCELEROMETER’S AXIS AND THE GRAVITY VECTOR.
0.5 POINTS
Here the arrows represent gravity and the blocks are the accelerometer located at 0, 30, 90 degrees. Measured
outputs are below.
9
Lab 9, Group # XX, Names: XX, XX
MENG 483L
EXERCISE #2:
In this exercise you will measure the tilt using an accelerometer attached to a protractor, which is used as the
angle reference. Power the accelerometer as described previously. Connect the banana clips to ELVIS DMM
voltage measurement input ports. Adjust the protractor knob to each angle indicated in Table 2 and measure with
Digital Multi-Meter the y-axis output voltage response.
RECORD THE MEASURED VALUES IN TABLE 2 AND PLOT THE NONLINEAR OUTPUT CHARACTERISTIC PERTAINING
TO YOUR MEASUREMENTS.
1 POINT
Table 2
Measurement of accelerometer tilt response.
Angle
0°
15°
30°
45°
60°
75°
Output
Voltage
TA CHECKMARK
10
90°
105°
120°
135°
150°
165°
180°
Lab 9, Group # XX, Names: XX, XX
MENG 483L
EXERCISE #3:
The program below is used to display the angle value which you measured. You will have to include your own
digital values for the desired angles, because the digital values change from one accelerometer to another. Load
the following program to the microcontroller. For new version CW5: go to the My Documents, rename the
“Default” folder as “Lab9”, go inside, rename CW file as “Lab9”. Double click on it to open. Copy and paste
following code:
#include <hidef.h>
/* common defines and macros */
#include <mc9s12xdt512.h>
/* derivative information */
#include "csm12d.h"
#include <stdio.h> //standard I/O - requires termio.c in Sources
#include “termio.c” //function prototypes
#pragma LINK_INFO DERIVATIVE "mc9s12xdt512"
/* Function that interpolates between table values. */
int interpolate(int x, int xtab[], int ytab[], int tsize) {
int y,n;
if(x <= xtab[0]) y=ytab[0];
else if(x >= xtab[tsize-1]) y=ytab[tsize-1];
else {
// find position in table
for (n=0; (xtab[n] < x) && (n < tsize); n++);
// interpolate
y = (ytab[n]-ytab[n-1])*(x-xtab[n-1])/(xtab[n]-xtab[n-1])+ytab[n-1];
}
return y;
}
/* interrupt service routines must go in NON_BANKED memory! */
#pragma CODE_SEG NON_BANKED
#pragma CODE_SEG DEFAULT
void main(void)
{
/* define variables */
int i, x, angle;
// x-table: ATD digital values
int xtab[13]={327,334,357,393,439,493,552,610,665,711,746,770,778};
// y-table: angles
int ytab[13]={0,15,30,45,60,75,90,105,120,135,150,165,180};
/* Initialize variables and hardware here */
CSM12D_USER_Init();
TERMIO_Init();
//Configure serial communication
// setup ATD converter
ATD0CTL2_ADPU = TRUE; //power up ATD converter
ATD0CTL3 = 1<<3; //do 1 conversion per sequence
ATD0CTL4_SRES8 = FALSE; //10-bit resolution
ATD0CTL4_PRS = 0; //set ATD clock
for(;;) /* program code goes inside this infinite loop */
{
// average 8 values to smooth data
11
Lab 9, Group # XX, Names: XX, XX
MENG 483L
for(i=0,x=0;i<8;i++) {
ATD0CTL5 = 0x80; // convert channel 0, right justified result
while (!ATD0STAT0_SCF); // wait until sequence is complete
x = x + ATD0DR0; // calculate running sum
}
x = x/8; // calculate mean
angle = interpolate(x,xtab,ytab,13);
printf("Digital %d = %d degrees\n",x,angle);
msleep(500);
}
/* please make sure that you never leave the main() function */
}
In your program, replace each digital value in the table with the new value you have recorded. This requires you to
run the program, noting what the digital output is for a given angle.
Re-compile and download the program with new digital values. Move the protractor knob throughout its range,
noting the accuracy of tilt measurements. You will observe that as the device is tilted from 0° to 180°, the
monitored angle will become less accurate as you approach 0° and 180°.
Show Calibrated Program to TA
WHY DOES ACCURACY DEGRADE AS YOU APPROACH 0° AND 180°?
12
1 POINT