1. Introduction

LHC Project Note XXX
2009-12 laurent.deniau@cern.ch
Magnetic model of Main Dipoles
L. Deniau
CERN, Technology Department
Keywords: Superconducting Magnets, Magnetic Field Model, Harmonics, LHC.
1. Introduction
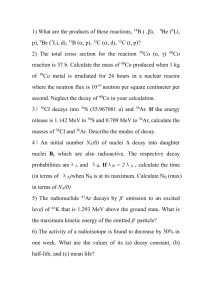
Function in the machine: Main dipole magnets (two poles) produce a uniform vertical magnetic field with opposite direction in each of the twin apertures (see
Figure 1
, left). A charged particle traveling longitudinally in a dipole magnet experiences a magnetic Lorenz force F = q v × B proportional to the magnetic field which bends the particle trajectory inward the ring. Hence, beam 1 (upstream, clockwise) sees a positive dipole field while beam 2
(downstream, anti-clockwise) sees a negative dipole field in order to follow the accelerator vacuum chamber. The main dipole magnets are referenced as “main bending magnets” or MB in the literature.
The LHC MBs are superconducting dipoles designed with two 56 mm apertures (see
Figure
1
, right), a magnetic length of 14.31 m and an operational current of 11850 A delivering a nominal magnetic field of 8.33 T for a 7 TeV beam energy (see
Table I
).
Figure 1: Magnetic field in dipole magnet (left) and cross-section of the LHC dipole (right)
This is an internal CERN publication and does not necessarily reflect the views of the LHC project management.
Table I: Summary of MB manufacturing parameters
Numbers and variants: we have 1232 MB installed into the arc cells (6 MB per arc cell) constituting the main components of the 8 machine sectors, plus 44 MB spares over a total of
1278 MB produced. They are all of the same type but with 4 variants in their name depending on their polarity and their bus-bars connection (see Appendix A for the electrical circuits drawing). The MB are connected one over two (the electrical neighbour is next after the physical neighbour), where MBA are connected to the direct bus-bar line while MBB are connected to the return bus-bar line. Hence, the MBA and the MBB are interspersed along the ring. The MB x R (where x is A or B) are placed in the arcs 1-2, 5-6, 6-7 and 7-8 where beam 1 goes through the external aperture (always aperture 1) which means that positive current enter in terminal A giving a positive dipole field in aperture 1. The MB x L are in the arcs 2-3, 3-4, 4-
5 and 8-1 where beam 2 goes through the external aperture (i.e. beam number is different from aperture number), which means that positive current enter to terminal B giving a negative dipole field in aperture 1 (see
Table II
).
Table II: Summary of MB variants
Naming convention: During the construction, cold masses HCMB xx A001-0 y 000 zzz have been identified by progressive numbers zzz from 1 to 416 and by firm numbers y assigned to the three magnets manufacturers. The xx represents the dipole variant from
Table II
. The short identifier MB yzzz was also very often used in the literature. The first 30 magnets for each firm were considered as pre-series magnets. 25 magnets were modified (repaired) during the series production and a new zzz id number equal to the old zzz id number plus 500 was reassigned
(see
Table III
). An extra set of 30 spare magnets was built at the end of the production and the magnets MB1005 and MB2001 were completely rejected (after 1.9 K measurements). The magnets MB1001, MB1002 and MB 3001 were allocated to the String 2 in SM18.
- 2 -
Table III: List of magnets modified during series production where new id = old id + 500
Expected operational cycles, range of current and operational temperature: The average injection current in the machine is 757 A, corresponding to a field strength of 0.535 T
(integrated field of 7.656 Tm). During the ramp the current increases with the beam energy following the so-called parabolic-exponential-linear-parabolic curve (PELP) and reaches the average nominal value in the machine of 11843 A, corresponding to an operational field of
8.327 T (integrated field of 119.159 Tm). The
Table IV
summarizes these average settings, which differ from octant to octant in the machine. The operational temperature is 1.9 K.
Table IV: MB operational currents and field for injection and collision(s) energy
2. Layout
Slots and positions: the 1232 MB are spread over the machine arc cells (see
Figure 2
) and allocated to slots of type MB.
xyyy .B
n in the machine layout where:
n is the beam number 1 or 2
x is the MB position A, B, C inside the cell (from left to right in
Figure 2
)
yyy is the half-cell identifier inside one arc, looking from the centre of the ring, and going left-to-right from 8R p to 34R p (right of point p = 1..8) and from 34L p
+1
to
8L p
+1
(left of point p
+1
= 2..8,1).
Each arc is composed of 154 MB as follow, going from 8 R p to 8 L p
+1
:
4 short half-cells (8R..11R) with 2 MB (no ‘C’ MB)
23 half-cells (12R..34R) with 3 MB
23 half-cells (34L..12L) with 3 MB
4 short half-cells (11L..8L) with 2 MB
- 3 -
Figure 2: Schematic LHC arc cell with MB marked as green boxes.
Circuits: in the 8 machine arc sectors from A12 to A81, all MB are powered by a single circuit where the direct line is powering the MBA and the return line is powering the MBB in sector of type R, and where the direct line is powering the MBB and the return line is powering the
MBA in sector of type L (see Appendix A).
3. Measurements
3.1 ROOM TEMPERATURE MAGNETIC MEASUREMENTS
Device: Measurements are done with a rotating coil 750 mm long at 8.5 A and 10 A (DIMM), in 20 positions spaced by approximately 750 mm to ensure no gap between measurements for a total of 40 measurements per magnet (i.e. with two apertures). First and last positions have approximately 405 mm inside and 345 mm outside the magnet.
Available and missing measurements: All the MB have been measured at room temperature
(RT). Transfer function measured at 8.5 A are assumed to be the same as ones measured at 10
A, which is equivalent to make the reasonable assumption that field strength varies linearly as a function of current over these 2.5 A.
Rejected or faulty measurements: none.
Use of the measurements in FiDeL: the room temperature measurements are used to estimate the geometric at 10 A for the transfer function and for the harmonics in all the MB, including those measured at 1.9 K. Warm-to-cold offsets (one for the transfer function and one for each harmonic) are added to the room temperature measurements to extrapolate the geometric at
5000 A as defined in FiDeL. Hence, the spread of the geometric component over all MB is the spread of the RT geometric (e.g. ~5.6 units for the transfer function).
3.2 MEASUREMENTS AT 1.9 K: “LOADLINE”
Device: Measurements are done with rotating shafts made of 13 sectors which include three
1150 mm tangential coils each, and spaced with a gap of 110 mm for a total length of 16.38 m. Only 12 sectors were used to measure the integral field of about 14.31 m long, which means that first and last positions have approximately 855 mm inside and 295 mm outside the magnet. The SMA system extrapolated the missing magnetic field in the gap after feed-down correction (i.e. magnetic alignment of shaft sectors) to deliver the integral field. Some MBs have also been measured with the Single Stretched Wire system for axis measurements and cross-calibration of the rotating coils for magnetic axis measurements.
Available and missing measurements: we have 18 (17) currents plateaux (400 A, 550 A, 600
A, 760 A, 1000 A, 1500 A, [2000 A], 2500 A, 3000 A, 4000 A, 5000 A, 6000 A, 7000 A,
8000 A, 9000 A, 10000 A, 11000 A, 11850 A, [12000 A]) with dI/dt = 0 A/s during measurements. The ramp rate between each plateau is dI/dt = ±10 A/s. For each plateau, two measurements were performed and averaged (no decay correction) per ramp-up and ramp-
- 4 -
down for each aperture, for a total of 1680 measurements per Loadline as shown in
Figure 3
.
The measurements performed during the plateau at 2000 A were often removed during the standard analysis because the integrator amplifiers had wrong automatic gain adjustment at this current, leaving only 1608 magnetic field measurements available for analysis. The measurements of the plateau at 12000 A were not systematically performed for various reasons during series tests (e.g. time). Besides, many sectors, currents, apertures or cycles measurements have been dropped due to inconsistency with the rest of the measurements (e.g. local vs. integral, body vs. heads, aperture 1 vs. aperture 2, settings errors, etc). The SMA analysis tools have a complete set of configuration files, which backup all this information. A total of 240 MB have been measured at 1.9 K, but due to data rejection aforementioned, only
232 MB and 436 apertures have been considered for the model analysis (see
Table V
for the list). Finally, some magnets have been repaired after their measurements at 1.9 K, leaving only 221 MB and 416 apertures with both RT and 1.9 K measurements for offsets calculation.
Nevertheless, the 436 apertures with Loadline measurements have been used to fit the model parameters.
Table V: List of the 232 MB magnets measured with Loadline cycle
- 5 -
Figure 3: Current profile during pre-cycle and Loadline measurements
Cross-calibration of measurements: The TF measurements performed during the Loadline cycle have been cross-calibrated with TF measurements made with the single stretch wire
(SSW) system. The TF geometric has been adjusted by applying offsets on the entire Loadline cycle, for few magnets and apertures (see
Table VI
).
Pre-cycle: 20 minutes top energy pre-cycle with 50 A/s ramp-up and ramp-down. This is not what is planned for the machine since the maximum possible ramp rate is 10 A/s due to the
RB circuit inductance (i.e. about 15 H per arc). At the time of writing the report, the ramp rate in the machine is temporally set to 2 A/s.
Rejected or faulty measurements: the details of rejected measurements can be found in the standard analysis reports available on the FiDeL web repository for each MB measured at 1.9
K. The 17 MB with complete Loadline (no data rejected at all) are the 1008, 1222, 1275,
1320, 1363, 1405, 1410, 1413, 2013, 2247, 2251, 2254, 3005, 3009, 3084, 3333 and 3340.
The list of MB with full Loadline cycle removed per aperture is given in
Table VII
.
Use of the measurements in FiDeL: the Loadline cycle measurements are used to extract the static components of the model, namely the warm-to-cold correlations necessary to extrapolate the room temperature measurements to the geometric, the DC magnetization, the residual magnetization and the saturation.
Table VI: List of TF shifts applied on Loadline cycles
- 6 -
Table VII: List of apertures removed in Loadline cycles
3.2 MEASUREMENTS AT 1.9 K: “MACHINE CYCLE”
Device: Measurements are done with rotating shafts made of 13 sectors which include three
1150 mm tangential coils each, and spaced with a gap of 110 mm for a total length of 16.38 m. Only 12 sectors were used to measure the integral field of about 14.1 m long, which means that first and last positions have approximately 855 mm inside and 295 mm outside the magnet. The SMA system extrapolated the missing magnetic field in the gap after feed-down correction (i.e. magnetic alignment of shaft sectors) to deliver the integral field.
Available and missing measurements: we have 131 measurements points versus time, decomposed in 34 points for injection plateau with dI/dt = 0 A/s (~1000 s), 52 points for the
10 A/s ramp-up (~25 min), 9 points for flat-top plateau with dI/dt = 0 A/s (~5 min) and 36 points for decreasing -10 A/s ramp down (~20 min). For each time point, one measurement was performed per aperture, for a total of 3144 measurements per “Machine cycle”, as shown in
Figure 4
. The ramp-up of the “Machine cycle” follows the so-called PELP curve (i.e.
Parabolic-Exponential-Linear-Parabolic) to minimize the snap-back effect. For the model, only the 816 measurements performed during the injection plateau with I = 760 A and dI/dt =
0 A/s have been used to compute the decay component. A total of 239 MB and 450 apertures have been measured in a “Machine cycle” (see
Table VIII
) and no aperture has been discarded during the transfer function analysis.
Pre-cycle: 20 minutes top energy pre-cycle with 50 A/s ramp-up and ramp-down. This is not what is planned for the machine since the maximum possible ramp rate is 10 A/s due to the
RB circuit inductance (i.e. about 15 H per arc). At the time of writing the report, the ramp rate in the machine is temporally set to 2 A/s.
Rejected or faulty measurements: the details of rejected measurements can be found in the standard analysis reports available on the FiDeL web repository for each MB measured at 1.9
K. The list of MB with full Machine cyle removed per aperture is given in
Table VIII
.
Use of the measurements in FiDeL: the measurements are used to evaluate the dynamic components of the model. The decay and snap-back components are implemented for b
3
, and b
5
and is neglected for all other components.
- 7 -
Figure 4: Current profile during "Machine cycle" measurements
Table VIII: List of apertures removed in Machine cycles
4. Transfer function
4.1 GEOMETRIC
The geometric is defined as the average ramp-up and ramp-down transfer function at 5000 A during the “Loadline” measurement. The persistent currents and DC magnetization contribution start to be significant below 4000 A and the saturation contribution starts to be significant above 6000 A with ~60 units at nominal current (11850 A), see
Figure 5
for a typical case. The geometric component is estimated by adding the warm-to-cold offsets for each manufacturer and aperture to the room temperature measurements (see
Table X
). This procedure is used also for the magnets measured at 1.9 K.
- 8 -
Figure 5: Averaged Loadline measurements of all dipoles and apertures with error bars at 1
Room temperature measurements
The room temperature measurements of all dipoles during the production show a rather uniform behaviour, with a slight negative trend of the transfer function (see
Figure 6
).
Average transfer function is 1.01
10
-2
Tm/A, and the standard deviation is about 5.6 units.
Figure 6: Transfer function measured at room temperature during the production with running average
- 9 -
Warm-to-cold extrapolation
The standard deviation of the room temperature and 1.9 K geometrics are respectively 5.6 units and 5.8 units (see Table IX) for the population measured at 1.9 K .
Table IX: Geometric warm-to-cold offset extrapolation, including per aperture offset and spread.
In order to follow the geometric specificity of each magnet manufacturer, a more complicated procedure is used (see Figure 7). The Table X shows that producer specificities are nonnegligible for the transfer function, b
2
, b
3
and b
5
. The warm-to-cold offsets of this table are used to extrapolate all the RT geometrics to 1.9 K for the REFPARM.
Figure 7: Procedure applied to calculate the warm-to-cold extrapolation of MB geometric
- 10 -
Table X: Geometric warm-to-cold offsets and spread of MB per group (00 means ALL firms)
Figure 8: Transfer function measurements at 1.9 K versus room temperature
Geometric per circuit
The geometric is provided per aperture for each circuit (see Table XI) and for each magnet.
The geometric of magnets is given by the procedure previously described in this section
(Figure 7) and the geometric of circuits is given by the average of their magnets geometric.
The σ in the following table includes only the magnets statistics, but not the uncertainty on the warm-to-cold offset of the Table X. The σ of the RB circuits over the all machine is about 3.2
- 11 -
units, and all the TF relative to the different circuits are within ±6 units. The σ of all the magnets is 5.8 units, which corresponds to the standard deviation of the geometric at 1.9 K.
Table XI: Geometric of the transfer function, including per aperture offset and spread.
4.2 STATIC COMPONENT
The static part of the FiDeL model is computed using the “Loadline” measurements over the
232 magnets and 436 apertures available. The averaged centred Loadline for all dipoles and apertures is shown in
Figure 9
, were the geometric is subtracted and the TF is expressed in units w.r.t. the geometric.
- 12 -
Figure 9: Integrated and centred TF versus current during “Loadline” measurements with error bars at 1
The extraction of the static component of the FiDeL model has been done following the standard procedure (i.e. version 2010). The maximum model error in the range of the operational currents is about 0.6 units at 1000 A, which is well below the requirement (see
Table XIII
).
A single model (i.e. REFPARM generic) is provided for all the MB with the parameters set summarized in
Table XII
. The column 2008 corresponds to the settings used in the machine at the time of writing this report and computed using all the parameters of the static model at once (i.e. numerical fit with the maximum degree of freedom). The column 2010 corresponds to the computation made for this report using the semi-physical decomposition of the components of the model with in particular a change in the I c
of the cables from 15000 A
(version 2008) to the more physical 13000 A (version 2010). The physical decomposition explains the reduction by a factor 10 of the DC magnetisation and the residual magnetisation components, which compensate each other in the 2008 version. The fit is optimized for the range of operational currents that is from 760 A to 11850 A. The average static component
(taken on the available sample of measurements), the FiDeL fit 2010, and the error is shown in
Figure 10
.
- 13 -
Table XII: Model parameters for the transfer function as computed in 2008 and 2010
Penetration field: this component is not considered in the actual MB model.
DC magnetization: The DC magnetization component is computed from the averaged rampup and ramp-down of the “Loadline”. It is pretty weak, i.e. a few units at injection. The maximum contribution of this component to the model is about -4.6 units at 760 A with an error of 0.1 units.
Residual magnetization: The residual magnetization component is computed from the rampup of the “Loadline” up to the geometric at 5000 A. The maximum contribution of this component to the model is about 3.5 units at 760 A with an error of -0.3 units.
Saturation: The saturation is computed from the ramp up of the “Loadline”, starting from the geometric at 5000 A. It is by far the most relevant component of the static model. It gives about -58 units at 11850 A. This component is well reproducible, and therefore the error is pretty low (0.3 units).
- 14 -
Table XIII: Transfer function static model versus Loadline measurements during ramp-up
Figure 10: TF model versus measurements during the ramp-up, and error (units).
- 15 -
4.3 DYNAMIC COMPONENTS
The transfer function decay measurements were performed at 760 A during a 1000 s plateau, as part of the “machine cycle” and is available for 239 magnets (450 apertures), but 20 apertures have been rejected during the analysis. Comparing to the 450 GeV injections during machine operation, the current used was about -3 A below. The decay of the transfer function shows a contribution nearly random as shown in Figure 12. The pre-cycle was a 50 A/s ramp-up and ramp-down with a 20 min flat top, leading to a larger decay contribution than expected in the machine, where one has 10 A/s ramp (or lower). The blind time t inj
presents at the beginning of the injection plateau during measurements, has been estimated for each measurement (see Figure 11) when pre-injection measurement points are available (391 apertures). The average blind time with μ = 14.2 s (σ = 2.1 s) is related to the delay required by the acquisition system before measurement points really take place and will be used to shift the timing of all the 430 injections plateaus used for the decay analysis (the blind time used in
2008 was 26 s).
Figure 11: Estimated average blind times t inj
before first measurement at injection plateau (blue, left axis, 224 magnets, 391 apertures) and the difference between apertures estimation for each magnet (red, right axis).
The average decay after 20 minutes injection of the transfer function of the all population is about μ = 1.4 units with a spread of σ = 1.2 units (see Table XIV
).
Table XIV: Decay of the transfer function in units (i.e. b
1
) after 1000 s.
In
Table XV
, we give the detail of the decay parameters after a tentative fit of the decay component. In particular, the fit reveals a possible (negligible) shift of the average decay of the transfer function by about 0.2 units. The slope at t inj
is about 1% and hence an uncertainty of σ = 2.1
s
on t inj
estimation has a negligible (non-linear) impact in b
1
. The parameters of the decay component given in the table for the 2010 column have been rescaled for t inj
= 0 and
- 16 -
can be used as-is (this is not the case of the column 2008) . This component of the FiDeL model is not used in operation .
Table XV: Decay component parameters of the transfer function in units (i.e. b
1
)
Figure 12: Decay of integrated b
1
at injection (430 apertures) and the decay fit (black line).
5. Field errors
5.1 GEOMETRIC
In dipole coils, allowed harmonics are b
3
, b
5
, b
7
, b
9
and b
11
while other harmonics are not allowed by the coils geometry and should have small systematic values.
Room temperature data
The systematic value of b
3
of cold masses has dropped from about 7 units to about 5.5 units with the introduction of cross-section 2 to about 3 units with the introduction of cross-section
3 (see dashed red lines in
Figure 13
) as a corrective action during the production steering, leading to an average b
3
of 3.28 units, which fulfils the beam dynamic target (red solid lines).
The
Figure 14
and
Figure 15
present the same production steering for the b
5
and b
7
.
- 17 -
Figure 13: b
3
along the production measured at room temperature with the running average (solid line).
Figure 14: b
5
along the production measured at room temperature with the running average (solid line).
Figure 15: b
7
along the production measured at room temperature with the running average (solid line).
- 18 -
Warm-to-cold extrapolation
The room temperature measurements are extrapolated to the geometric 1.9 K using the procedure described in Figure 7. The average and spread of the RT and 1.9 K geometrics are respectively 4.0 units and 3.7 units (σ = 2.0 units for both) for b
3
and 0.0 units and -0.1 units
(σ = 0.6 units for both) for b
5 and show a very good warm-to-cold correlation (see Figure 16,
Figure 17, Figure 18 and Figure 19). All the harmonic offsets have been symmetrised over the twin apertures except the b
2
, which was not symmetrised at all and the b
4
, which was antisymmetrised (see Table XVII) during the computation of the offsets. The average warm-tocold offset is ±1.30 units (σ = 0.35 units) for b
2
, -0.31 units (σ = 0.21 units) for b
3 and -0.13 units (σ = 0.06 units) for b
5
.
Table XVI: Geometrics averages and spreads of the important harmonics at room temperature (10 A) and 1.9 K
(5000 A) over the magnet population used during the warm-to-cold extrapolation
Table XVII: Geometric warm-to-cold offsets and spread of MB per group (00 means ALL firms)
- 19 -
Figure 16: Room temperature versus 1.9 K measurements for b
2
Figure 17: Room temperature versus 1.9 K measurements for b
3
- 20 -
Figure 18: Room temperature versus 1.9 K measurements for b
5
Figure 19: Room temperature versus 1.9 K measurements for b
7
Geometric per circuit
The geometric is provided for each circuit (see Table XVIII and Table XIX) and for each magnet in the REFPARM table. The geometric of magnets is given by the procedure previously mentioned and the geometric of circuits is given by the average of their magnets geometric. For the allowed harmonics, the systematic components are respectively for b
3 about 3 units (σ = 0.9 units), b
5
about -0.3 units (σ = 0.2 units), b
7
about 0.9 units, b
9
about
- 21 -
0.4 units and b
11
about 0.6 units. Only b
3
and b
5
are compensated in the machine such that its integrated geometric and static and dynamic components are close to zero.
For the not allowed harmonics, all the harmonics have systematic multipoles close to zero with very small standard deviation except the b
2
which has a σ = 1.48 units.
Table XVIII: Estimates of the geometric component of normal harmonics.
Table XIX: Estimates of the geometric component of skew harmonics.
5.2 STATIC COMPONENTS
The static part of the FiDeL model is computed for the allowed harmonics b
3
and b
5
and for other significant not allowed harmonics b
2
, a
2
and b
4
using the “Loadline” measurements. All the 436 apertures available have been used during the analysis (no data rejected). The extraction of the static component of the FiDeL model has been done following the standard procedure [1]. One fit (i.e. REFPARM generic) is provided for each allowed harmonics (i.e. b
3
and b
5
) and for each not allowed harmonics with significant systematic contribution (i.e. b
2
, b
4
and a
2
). The fit is the same for all the MB; parameters are summarized in
Table XX where the columns tagged 2008 are the settings used by the machine (i.e. LSA) at the time of writing this report and the columns tagged 2010 are the values computed during the analysis performed for this report and following the physical approach of the FiDeL model with in particular, a change in the I c
of the cables from 15000 A (version 2008) to the more physical
13000 A (version 2010).
- 22 -
For b
3
, the maximum model error in the range of operation is about -1 unit at 760 A, which is not acceptable. The measurements of all available magnets are shown in
Figure 21
: one clearly sees that the DC magnetization is the dominant component. In order to bring the model error within the required tolerances, the residual magnetization component, which is the main model error contributor, should be split with the penetration component not yet implemented ; therefore the FiDeL model will be based on parameters of the numerical fit, which has a negligible error.
For b
5
, the systematic dependence on excitation current is also the dominant component with about 1 unit (see
Figure 23
). So even if the physical decomposition of the components lead to satisfying model errors with a maximum error of about 0.04 units at 1000 A, the FiDeL model will also be based on parameters of the numerical fit for consistency with the b
3
and the settings of 2008.
The b
2
is the only not allowed harmonic with a significant systematic contribution at all
). Hence, it relies on all the model components, including the two
saturation components. The physical decomposition works pretty well, with model errors maxima of about 0.03 units at 760 A from the DC magnetization and about 0.06 units at 7000
A from the saturation. Nevertheless, the FiDeL model will also be based on parameters of the numerical fit for consistency with the b
3
and b
5
settings of 2008.
For b
4
and a
2
, the significant systematic contribution is only visible for the saturation component with values maxima of about 0.2 units and -0.1 units respectively and model errors negligible (i.e. far less than 0.01 units). But for consistency with other REFPARM generics, the FiDeL model will be based on parameters of the numerical fit already used in 2008 and which relies on the entire model components .
For b
7
and b
9
, the significant systematic contribution is only visible for the DC magnetisation with values maxima of about -0.4 units and 0.2 units with model errors less than 0.04 units and 0.02 units respectively. For b
11
, the contribution is negligible at all currents. Since the b
7 and b
9
are not corrected in the machine, no REFPARM generics are provided. The values given here are only informative.
- 23 -
Table XX: Static model parameters for b
3
, b
5
, b
2
, b
4
and a
2
Penetration field: this component is not considered in the actual MB model.
DC magnetization: The DC magnetization component is computed from the averaged rampup and ramp-down of the “Loadline”. The maximum contribution of this component to the model is about -7.5 units for b
3 , 1 unit for b
5 , -0.4 units for b
7 , 0.2 units for b
9 , 0.15 units for b
5 , and negligible for other harmonics at 760 A.
Residual magnetization: The residual magnetization component is computed from the rampup of the “Loadline” up to the geometric at 5000 A. If the error is considered significant for the operation, the field penetration component could be used to fit lower currents (e.g. b
3
).
The maximum contribution of this component to the model is about -0.4 units for b
3 (against
0.4 units for the measures leading to an error of 0.8 units), 0.1 units for b
5 and -0.2 units for b
2 at 760 A with a negligible error for b
5
and b
2
. This component is fully dominated by the DC magnetization for all harmonics except the b
2
.
Saturation: The saturation is computed from the ramp up of the “Loadline”, starting from the geometric at 5000 A. The maximum contribution of this component to the model is about -0.4 units for b
3 (with maximum error at 5000 A), -0.12 units for b
5
, -1.7 units for b
2
(with double curvature), 0.2 units for b
4
, -0.1 units for a
2
and negligible values for other harmonics. This component is systematic leading to negligible model errors for all harmonics, but with an uncorrelated behaviour for the b
3
.
- 24 -
Figure 20: b
3
model versus measurements during the ramp-up with the model error (right axis)
Figure 21: Integrated and centred b
3
versus current during “Loadline” measurements with error bars at 1
- 25 -
Figure 22: b
5
model versus measurements during the ramp-up with the model error (right axis)
Figure 23: Integrated and centred b
5
versus current during “Loadline” measurements with error bars at 1
- 26 -
Figure 24: b
2
model versus measurements during the ramp-up with the model error (right axis)
Figure 25: Integrated and centred b
2
versus current during “Loadline” measurements with error bars at 1
- 27 -
Figure 26: Integrated and centred b
4
versus current during “Loadline” measurements with error bars at 1
Figure 27: Integrated and centred a
2
versus current during “Loadline” measurements with error bars at 1
- 28 -
Figure 28: Integrated and centred b
7
versus current during “Loadline” measurements with error bars at 1
Figure 29: Integrated and centred b
9
versus current during “Loadline” measurements with error bars at 1
- 29 -
5.2 DYNAMIC COMPONENTS
The decay measurements of the allowed harmonics b
3
and b
5
were performed at 760 A during a 1000 s plateau, as part of the “machine cycle” and is available for 239 magnets (450 apertures), but 20 apertures have been rejected during the analysis. The decay b
3
and b
5 show a systematic contribution similar in both apertures as shown in Figure 30 and Figure 31. The pre-cycle was a 50 A/s ramp-up and ramp-down with a 20 min flat top, leading to a larger decay contribution than expected in the machine, where one has 10 A/s ramp (or lower). The blind time t inj
presents at the beginning of the injection plateau during measurements, has been estimated for each measurement (see Figure 11) when pre-injection measurement points are available (391 apertures). The average blind time μ = 14.2 s with a spread of σ = 2.1 s is related to the delay required by the acquisition system before measurement points really take place and will be used to shift the timing of all the 430 injections plateaus used for the decay analysis (the blind time used in 2008 was 26 s).
The average decays after 20 minutes injection of the all population is about μ = 2.05 units with a spread of σ = 0.48 units for b
3
and about μ = -0.35 units with a spread of σ = 0.11 units for
b
5
Table XXI: Decay of the b
3
and b
5
in units after 1000 s.
In Table XXII, we give the detail of the parameters of the decay component for the allowed harmonics b
3
and b
5 (with b
1
reminded for completeness). In particular, the fit reveals a shift of the average decay of about 0.2 units for b
3
and
about -0.04 units for b
5 . The slope at t inj
is about 1% and hence an uncertainty of σ = 2.1
s
on t inj
estimation has a negligible (non-linear) impact on b
3
and b
5 . The parameters of the decay component given in the
Table XXII
for the
2010 columns have been rescaled for t inj
= 0 and can be used as-is (this is not the case of the columns 2008) . The correlation coefficient g
SB
of the scaling law to predict the snap-back from the decay at the beginning of the ramp has been added for completeness and is taken from [7] and recent measurements and analysis performed for the FiDeL model [9]. For the moment, the FiDeL model is based on the 2008 parameters .
Table XXII: Decay and snap-back component parameters of b
3
and b
5
(with b
1
reminded).
- 30 -
Figure 30: Decay of integrated b
3
at injection (430 apertures) and the decay fit (black line).
Figure 31: Decay of integrated b
5
at injection (430 apertures) and the decay fit (black line).
- 31 -
The table
Table XXIII
provides the tabulation for long-time injection of the b
3
and b
5 decay.
Table XXIII: Tabulation of the decay component of b
3
and b
5
for long-time injection
7. Summary, missing topics, and critical issues
The decay of the TF at injection is negligible and not considered in the model. The decay of b
3
is significant and critical for the operation while the decay for b
5
is small. The parameters given in this report overestimate the decay and snap-back, since it is based on measurements with a pre-cycle ramp rate of 50 A/s. An adjustment of the decay component may be necessary when the measurements at
10000 s are available and analysed. New measurements of the decay at the beginning of the injection are under investigation and let expect some possible improvement in the decay component model for low ramp-rates.
The snap-back is only mentioned in the report because of the lack of snap-back measurements in the series data. Some hall probe measurements exist (so called b
3 scanner) and could be re-analyzed to confirm the actual results, but this would be a significant effort (if required). For the time being, we recommend the interested reader to refer to [7] and [8] for further details.
The pre-cycle history is not included (yet) in the report and is required for proper scaling of the decay and snap-back to the actual operation condition (2 kA/s). For the moment, we recommend the interested reader to refer to [8].
Less than 5% of the cold data has been used for this report. A lot of information remains unanalyzed in series cold measurements but it would require a huge effort in the absence of appropriate tools. Future analysis should focus on new measurements (e.g. FAME), which are much simpler to analyse unless large statistics on series cold measurement need to be performed.
8. References
[1] FiDeL web site: http://cern.ch/fidel
[2] Field error naming conventions for LHC magnets (EDMS 90250)
[3] Model specifications (EDMS 908232)
[4] Magnet specification (EDMS, CAD, report)
[5] Machine requirements (http://cern.ch/fidel/files/ABP-requirements-v2.xls)
[6] Mathematical formulation to predict the harmonics of the superconducting LHC magnets.
N. Sammut, L. Bottura and J. Micallef . Physical Review Accelerators and Beams, ref. 9
012402, 2006.
- 32 -
[7] Mathematical formulation to predict the harmonics of the superconducting LHC magnets:
II. Dynamic field changes and scaling laws. N. Sammut, L. Bottura, P. Bauer, G. Velev, T.
Pieloni and J. Micallef . Physical Review Accelerators and Beams, ref. 10 082802, 2007.
[8] Mathematical formulation to predict the harmonics of the superconducting LHC magnets:
III. Precycle ramp rate effects and magnet characterization. N. Sammut, L. Bottura, G.
Deferne, and W. Venturini Delsolaro . Physical Review Accelerators and Beams, ref. 12
102401, 2009.
[9] Update on analysis of 2010 snapback measurements: b3 and b5, N. Aquilina , 2010-04-27.
Slides .
- 33 -
Appendix A
- 34 -