A Formal Approach to Workflow Analysis
advertisement

outside instruments. For example, to provide internet roaming on or data
retrieving, seamless wireless network connectivity should be guaranteed. And if
GPS and mobile TV are wanted, information delivery from dedicated server is
necessary.
However, such capability is not so easy to be achieved as mobile users
change their locations among buildings and streets, or stand at shadowed places.
Under those conditions, maintaining the wireless connection via a specific radio
access technology (RAT) may not be possible due to its limited coverage.
Therefore, cognitive radio which lets devices dynamically re-configure
themselves to connect to varying RATs or transmit over unlicensed bands
[3][20], and cooperative relay which allow devices relay data of other devices
[21] are both considered as expecting technologies to achieve anywhere
wireless connections.
Under this scenario, all users communicate with each other via cognitive
radio forming a cognitive relay network to realize the ubiquitous computing.
However, there are some technical challenges before we can buildup such
systems. Firstly, in initialization phase the device should aware the environment
that it is operating and takes corresponding actions. It is critically depending on
the capability of the devices to sense existing and available RATs, and to judge
the network condition accordingly. To complete this work, the general sensing
and tomography are included in our discussion.
Secondly, all the decisions about utilizing available frequency bands is
depending on the results of sensing and tomography. However, due to the
heterogeneity of the network, fluctuant of wireless channel and mobility of relay
nodes. This results is varying with time, to utilize such all the available resource
in an optimal way, we then study the MAC and spectrum sharing in the
following.
Thirdly, the ultimate goal of the system is networking to provide
anytime/anywhere services. Therefore, based on the completion of resource
management, routing and QoS control become the next issues. Furthermore, in
such a dynamic network, any erroneous transmission may not be recovery by
traditional ARQ/HARQ because the original path may become unavailable. To
deal with all the challenges as a whole, both routing and HARQ in this scenario
are considered.
Finally, as we said, one of the most important feature of this systems is, it can
leverage different RATs to complete its transmission. However, such
mechanism needed be designed carefully since each RAT provides different
quality of links, and it should be considered jointly with the requirements of
application. To finalize the target, we integrate network selection into this paper
in the last part.
Cognitive Ubiquitous Computing
Kwang-Cheng Chen, Fellow, IEEE, Feng-Seng Chu, Shin-Ming Cheng, ShengYuan Tu, Shih-Chun Lin,Yu-Yu Lin, Po-Yao Huang, Ao Weng Chon
Institute of Communication Engineering
National Taiwan University
No. 1, Sec. 4, Roosevelt Road.
chenkc@cc.ee.ntu.edu.tw
Abstract
1. Introduction
Accessing information services anytime/anywhere is a beautiful scenario of
human technology [16] while it is still a dream until now. One of the main
challenges prevents us from it is how to make the pocket computing devices
adapting to environments. In general, such adaptation means connection with
1/15
spectrum sensing and further impacts on network operation, we represent the
spectrum availability at CR-Rx by an another indicator function.
2. CRN General Sensing and Tomography [杜勝元]
A. General Spectrum Sensing
Traditional spectrum sensing mechanisms, focusing on physical layer
detection or estimation at CR transmitter (i.e. CR-Tx), ignore the spectrum
availability at CR receiver. Due to existence of fading channels and noise
uncertainty along with limited sensing duration, even when there is no
detectable transmission of PS during this venerable period, the receiver of this
opportunistic transmission (i.e. CR-Rx) may still suffer from collisions from
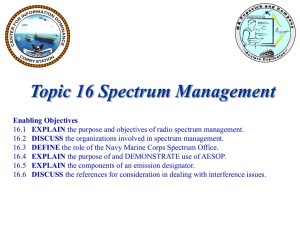
simultaneous transmission(s), as Fig. 1 shows. The CR-Rx locates in the middle
of CR-Tx and PS-Tx and PS activities are hidden to CR-Tx, which induces a
challenge to spectrum sensing. We can either develop more powerful sensing
techniques such as cooperative sensing to alleviate hidden terminal problem, or
a more realistic mathematical model. Traditional spectrum sensing mechanisms
could be explained by a mathematical structure of defining link availability.
Definition 1: CR link availability, between CR-Tx and CR-Rx, is specified by
an indicator function
1 CR link is available for opportunistic transmission
𝟏link = {
(1)
0 otherwise
Definition 2: CR-Tx senses the spectrum and determines link availability based
on its observation as
1 CR link is available for transmission at CR − Tx
𝟏Tx = {
(2)
0 otherwise
link
Tx
Lemma 1: Traditional spectrum sensing for CR link suggests 𝟏
=𝟏
As we explain in Figure 1 and/or take interference into testing scenario, we
may note that Lemma 1 is not generally true. To generally model spectrum
sensing, including hidden terminal scenarios, we have to reach two
simultaneous conditions: (1) CR-Tx senses the link available to transmit (2)
CR-Rx can successfully receive packets, which means no PS signal at CR-Rx
side, nor significant interference to prohibit successful CR packet reception (i.e.
beyond a target SINR). Therefore, CR link availability should be composed of
localized spectrum availability at CR-Tx and CR-Rx, which may not be
identical in general and is rarely noted in current literatures. [23] developed a
brilliant two-switch model to capture distributed and dynamic spectrum
availability. However, [23] focused on capacity from information theory and it
is hard to directly extend the model in studying network operation of CRN.
Actually, two switching functions can be generalized as indicator functions to
indicate the activities of PS based on the sensing by CR-Tx and CR-Rx
respectively [11]. Generalizing the concept of [23] to facilitate our study in
PS-Rx
Collisions at CR-Rx!
PS-Tx
PS-Tx Range
CR-Rx
CR-Tx
CR-Tx Range
Fig 1. Hidden terminal problem. CR-Rx lies in the middle of CR-Tx and
PS-Tx and PS-Tx is hidden to CR-Tx.
Definition 3: The true availability for CR-Rx can be indicated by
1 CR link is available for reception at CR − Rx
𝟏Rx = {
(3)
0 otherwise
To satisfy two simultaneous conditions for CR link availability, CR link
availability can be represented as multiplication (i.e. AND operation) of the
indicator functions of spectrum availability at CR-Tx and CR-Rx.
Proposition 1: 𝟏link = 𝟏Tx 𝟏Rx
The next challenge would be that 𝟏Rx cannot be known a priori at CR-Tx,
due to no centralized coordination nor information exchange in advance among
CRs when CR-Tx wants to transmit. As a result, general spectrum sensing turns
out to be a composite hypothesis testing. In this paper, we introduce statistical
inference that is seldom applied in traditional spectrum sensing to
predict/estimate spectrum availability at CR-Rx.
Further examining Proposition 1, we see that prediction of 𝟏Rx is necessary
when 𝟏Tx = 1, which is equivalent to prediction of 𝟏link . In this paper, we
model 𝟏Rx when 𝟏Tx = 1 as a Bernoulli process with the probability of
spectrum availability at CR-Rx Pr(𝟏Rx = 1|𝟏Tx = 1) = 𝛼 . The value of α
exhibits spatial behavior of CR-Tx and CR-Rx and thus impacts of hidden
2/15
Pr(𝟏Co = 0|𝟏Rx = 0, 𝟏Tx = 1) = 𝛾
Thus the correlation between 𝟏Co and 𝟏Rx , 𝜌 , and corresponding properties
become
√𝛼(𝛼 + 1)(𝛽 + 𝛾 − 1)
𝜌=
(7)
√(𝛼𝛽 + (1 − 𝛼)(1 − 𝛾))(𝛼(1 − 𝛽) + (1 − 𝛼)𝛾)
terminal problem. If α is large, CR-Rx is expected to be close to CR-Tx and
hidden terminal problem rarely occurs (and vise versa).
The prediction of 𝟏Rx at CR-Tx can be modeled as a hypothesis testing, that
is, detecting 𝟏Rx with a priori probability α but no observation. To design
optimum detection, we consider minimum Bayesian risk criterion, where
Bayesian risk is defined by
(4)
𝑅 = 𝑤Pr(𝟏link = 0|𝟏Tx = 1)PF + Pr(𝟏link = 1|𝟏Tx = 1)PM
̂link = 1|𝟏link = 0, 𝟏Tx = 1) , PM = Pr(𝟏
̂link = 0|𝟏link =
In (4), PF = Pr(𝟏
1, 𝟏Tx = 1), and 𝑤 ≥ 0 denotes the normalized weighting factor to evaluate
̂link represents prediction of 𝟏link = 0.
costs of PF and PM , where 𝟏
Rx
Since 𝟏
is unavailable at CR-Tx, we have to develop techniques to
"obtain" some information of spectrum availability at CR-Rx. Inspired by the
CRN tomography [4], we may want to derive the statistical inference of 𝟏Rx
based on earlier observation. It is reasonable to assume that CR-Tx can learn the
status of 𝟏Rx at previous times when 𝟏Tx = 1, which is indexed by n. That is, at
time n , CR-Tx can learn the value of 𝟏Rx [𝑛 − 1], 𝟏Rx [𝑛 − 2], ⋯ . In other
words, we can statistically infer 𝟏Rx [𝑛] from 𝟏Rx [𝑛 − 1], 𝟏Rx [𝑛 −
2], ⋯ , 𝟏Rx [𝑛 − 𝐿], where 𝐿 is the observation depth. This leads to a classical
problem from Bayesian inference.
Lemma 2: Through the Laplace formula, the estimated probability of spectrum
availability at CR-Rx is
𝑁+1
(5)
𝛼̂ =
𝐿+2
where 𝑁 = ∑𝐿𝑙=1 𝟏Rx [𝑛 − 𝑙].
Proposition 2: Inference-based spectrum sensing at CR-Tx thus becomes
Tx
̂link = {𝟏 𝛼̂ ≥ 𝑤/(𝑤 + 1)
𝟏
(6)
0 otherwise
Remark: CR-Tx believes CR link is available and forwards packets to CR-Rx if
the probability of spectrum available at CR-Rx α is high enough. Otherwise,
CR-Tx is prohibited from using the link even when CR-Tx feels free for
transmission because it can generate unaffordable cost, that is, intolerable
interference to PS or collisions at CR-Rx.
B. General Cooperative Spectrum Sensing
Lemma 3: 𝜌 is a strictly concave function with respect to 𝛼 ∈ (0,1) if 1 < 𝛽 +
𝛾 < 2 but a strictly convex function if 0 < 𝛽 + 𝛾 < 1. In addition, 𝟏Co and 𝟏Rx
are independent if and only if 𝜌 = 0, i.e, 𝛽 + 𝛾 = 1.
By statistical inference, CR-Tx can learn statistical characteristic of 𝟏Rx and
Co
𝟏 , i.e., {𝛼, 𝛽, 𝛾}, by previous observations. From a viewpoint of hypothesis
testing, we would like to detect 𝟏Rx with a priori probability α and one
observation 𝟏Co , which is the detection result at the cooperative node.
Proposition 3: Spectrum sensing with one cooperative node becomes
𝟏Tx
𝛼 ≥ max{𝛼1 , 𝛼2 }
Tx Co
̂link = 𝟏 𝟏 𝛼2 < 𝛼 < 𝛼1
𝟏
(8)
̅Co 𝛼1 < 𝛼 < 𝛼2
𝟏Tx 𝟏
{0
otherwise
̅Co is the complement of 𝟏Co , 𝛼1 = 𝑤𝛾/(1 − 𝛽 + 𝑤𝛾) and 𝛼1 = 𝑤(1 −
where 𝟏
𝛾)/(𝛽 + 𝑤(1 − 𝛾)).
It is interesting to note that cooperative spectrum sensing is not always
helpful. In the following, we adopt minimum error probability criterion (i.e.,
𝑤 = 1 ) and give an insight into the condition that cooperative sensing is
helpful. Applying Lemma 3, we can reach the following corollary.
Corollary 1: If we adopt minimum error probability criterion, cooperative
spectrum sensing becomes
𝟏
𝟏Tx
if |𝜌| ≤ 𝛹
̂link = { [𝛼≥1/2]
𝟏
(9)
̅Co )𝟏Tx if |𝜌| > 𝛹
(𝟏[𝜌>0] 𝟏Co + 𝟏[𝜌<0] 𝟏
where 𝟏[𝑠] is an indicator function, which is equal to 1 if the statement s is true
else equal to 0, and
𝛽+𝛾−1
𝛹=|
|
√2(𝛽𝛾 + (1 − 𝛽)(1 − 𝛾))
Spectrum sensing at cooperative node, which can be represented 𝟏Co , is to
explore more information about 𝟏Rx and therefore alleviates hidden terminal
problem. From above observation, we only care about correlation of 𝟏Rx and
𝟏Co when 𝟏Tx = 1 and assume
Pr(𝟏Co = 1|𝟏Rx = 1, 𝟏Tx = 1) = 𝛽
Remark: The effectiveness of a cooperative node only depends on the
correlation of spectrum availability at CR-Rx and the cooperative node. If the
correlation is low, information provided by the cooperative node is irrelevant to
the spectrum sensing which degenerates to (5).
3/15
We present an example of existence of unidirectional link in CRN. In Fig.
2(b), assume one CR is located at (1,0). Obviously, the CR-Tx is not connective
to the CR and therefore is prohibited from forwarding packets to the CR.
However, by Fig. 2(a), the CR is connective to CR-Tx, which makes the link
unidirectional (only from the CR to CR-Tx). With the aid of a cooperative node
located at (0.4,0.3), the link returns to a bidirectional link.
C. Link property in CRN
If we consider a path loss model between CR-TX and CR-Rx, transmission
region of CR-Tx should be a circularly shaped region without the existence of
PS. We call this region coverage of CR-Tx. However, due to hidden terminal
problem as in Fig. 1, where PS is either apart from CR-Tx or is blocked by
obstacles, the probability of collision at CR-Rx could increase and CR-Tx may
be prohibited from forwarding packets to CR-Rx. Therefore, CR-Tx may be
prohibited from using the link even when CR-Tx feels free for transmission.
Therefore, allowable transmission region of CR-Tx, defined as neighborhood
of CR-Tx, shrinks from its coverage and is no longer circular shape. In addition,
hidden terminal problem is location dependent, that is, PS is hidden to CR-Tx
but not to CR-Rx in Fig. 1. Thus, CR-Rx is possibly allowed forwarding
packets to CR-Tx. From such observations, links in CRN are generally
asymmetric and even unidirectional as the argument in [13]. Therefore,
traditional feedback mechanism such as acknowledgement and automatic repeat
request (ARQ) in data link layer may not be supported in general. This
challenge can be alleviated via cooperative schemes. Roles of a cooperative
node in CR network operation thus include
Extend neighborhood of CR-Tx to its coverage
Ensure bidirectional links in CRN (i.e. enhance probability to maintain
bidirectional)
Enable feedback mechanism for the purpose of upper layers
Therefore, spectrum sensing capability mathematically determines CRN
topology. It also suggests the functionality of cooperative nodes in topology
control and network routing, which is critical in CRN due to asymmetric links
and heterogeneous network architecture [13].
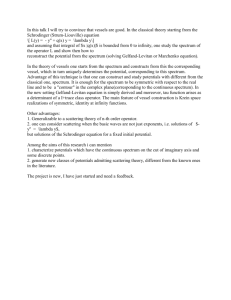
We illustrate a numerical example in Fig. 2, where neighborhood of CR-Tx
("+" in the figure) with/without a cooperative node ("o" in the figure) is
depicted by a thick and a thin line respectively. In Fig. 2(a), PS ("*" in the
figure) is placed near to CR-Tx (0.7,0). We observe that CR-Tx almost perfectly
detects the state of PS and neighborhood of CR-Tx approaches to its coverage
and the cooperative node is not necessary in this case. However, when PS is
apart from CR-Tx (1.7,0) as in Fig. 1, the neighborhood at PS side shrinks and
is no longer circularly shaped because PS is hidden to CR-Tx and hence
probability of collision at CR-Rx increases. Fig. 2(b)~(d) illustrate the
neighborhood under different locations of the cooperative node. We observe
that neighborhood area decreases when the cooperative node moves away from
PS and there even exists a region where cooperative sensing can not help.
Neighborhood of CR-Tx, Without Obstacles,w=4
(a)
(b)
2
2
1
y-axis
y-axis
1
0
-1
0
-1
-2
-2
-1
0
1
-2
-2
2
-1
x-axis
(c)
2
1
2
1
2
(d)
2
1
y-axis
1
y-axis
0
x-axis
0
-1
0
-1
-2
-2
-1
0
1
-2
-2
2
x-axis
Without Cooperation
-1
0
x-axis
With Cooperation
CR-Tx
Primary System
Cooperative Node
Fig. 2 Neighborhood of CR-Tx without obstacles. CR-Tx can only be
allowed forwarding to CR-Rx located within the bounded region.
D. Network Level Tomography in CRN
Successful CRN operations generally relies on cooperative and opportunistic
relays through neighboring (CR) nodes, which always requires a prior
knowledge of such cooperative relay node-to-node availability to implement
routing and flow control [12], etc. Such node-to-node availability on top of the
link availability among one-hop neighboring nodes relates to radio resource, CR
mechanism, and trust [13]. Due to the opportunistic transmission nature of CRN,
4/15
the guaranteed quality of service (QoS) control provides an intellectual
challenge. Provided the statistics of the node-to-node availability, the statistical
quality of service (QoS) control is a practical alternative way for end-to-end
services in CRN operations. To infer such a prior knowledge or estimation of
node-to-node availability associated with cooperative relay(s), we may observe
the history and statistics of successful packet transportation over a specific
cooperative relay path. Since there involves packet transmissions (either
implicit traffic packets or explicit probing packets) over multiple links, we
consider this challenge as active CRN tomography at network level.
Considering a scenario with a set of possible cooperative relay paths among
coexisting systems, the source node estimates the success probability of packet
transmission according to the historical record from the reception of destination
node. Both traffic types of the deterministic packet arrival and the Poisson
packet arrival from the source node will be studied.
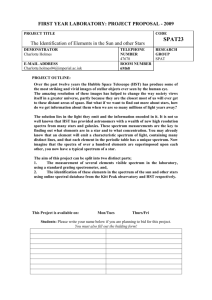
In Figure 3, a source node 𝑛𝑆 transmits packets to a destination node 𝑛𝐷
through K possible relay paths 𝐺𝑗 , j = 1, … 𝐾 . Let the successful packet
𝑗
𝑗
transmission probability of the routing path 𝐺𝑗 be 𝑃S . Suppose that 𝑃𝑆 , 𝑗 =
1, . . . , 𝐾 are selected beforehand independently from the uniform distribution on
the interval [0,1] and unchanged in thereafter packets transmissions. Assume
that the packets are slotted transmitted and received by the source node and the
destination node, respectively, with time interval ∆𝑡𝑗 in one time slot for the
relay path 𝐺𝑗 , and the propagation delay of 𝐺𝑗 , denoted as 𝐷𝑗 , is constant. The
destination node observes the packet reception in M time slots (and thus 𝑀∆𝑡𝑗
observation time for the relay paths 𝐺𝑗 ) and feedbacks this historical
information to the source node in a reliable way (or the existence of reliable
observation with delay). As the destination node knows the relay path(s) of the
𝑗
received packets, we may suppose the probabilities 𝑃S , j = 1, . . . , K to be
independently determined for all 𝑛.
1) Deterministic Packet Arrival: Within each time slot, the source node
transmits one packet by the routing path 𝐺𝑗 to the destination node (and thus the
packet rate is fixed in 1⁄∆𝑡𝑗 ). We use an indicator function to represent the
transmission result of the i-th transmission by the relay path 𝐺𝑗
1, 𝑖-th transmission is successful
𝟏𝑗 [𝑖] = {
𝑖 = 1, … , 𝑀
(10)
0, 𝑖-th transmission is failed
𝑗
and 𝟏𝑗 [𝑖] is thus Bernoulli-distributed with expected value 𝑃S , i.e. with
probability
𝑗
𝑃S
equal to 1 and probability (1 −
probability density function of
𝑗
𝑃S ,
𝑗
𝑓(𝑃S ),
𝑗
𝑃S )
𝑗
𝑓(𝑃S ) =
(𝑀 + 1)!
𝑗 𝑞𝑗
𝑞𝑗 ! (𝑀 − 𝑞𝑗 )!
𝑗 𝑀−𝑞𝑗
(𝑃S ) (1 − 𝑃S )
(11)
where 𝑞𝑗 = ∑𝑀
𝑖=1 𝟏𝑗 [𝑖].
Proposition 4: With mean-square error cost function, the Bayes estimator
𝑗
becomes 𝑃̂S,MS = (𝑞𝑗 + 1)/(𝑀 + 2) . On the other hand, with uniform cost
𝑗
function, the Bayes estimator becomes 𝑃̂S,UNF = 𝑞𝑗 /M.
2) Poisson Packet Arrival: We now consider that the packets arrive on 𝐺𝑗 as a
Poisson process having rate 𝜆𝑗 . Consequently, in each time slot, the probability
𝑗
of no packet to be transmitted is 𝑃𝑁 = 𝑒 −𝜆𝑗 ∆𝑡𝑗 . Assuming that 𝜆𝑗 ∆𝑡𝑗 is small
enough, it results in negligible probability for more than one packet arrive
within one time slot. Hence we can only consider the probability that one packet
𝑗
𝑗
arrives as 𝑃𝑌 ≅ 1 − 𝑒 −𝜆𝑗 ∆𝑡𝑗 and no packet arrives as 𝑃𝑁 . We define an indicator
function to represent the reception result of the i-th observation by 𝐺𝑗 at the
destination node
𝟏𝑗𝑅 [𝑖]
1, successful reception from 𝑗-th relay path in 𝑖-th observation
(12)
={
0, no reception from 𝑗-th relay path in 𝑖-th observation
𝑖 = 1, … , 𝑀
𝑀
𝑅 [𝑖]
Let 𝑠𝑗 = ∑𝑖=1 𝟏𝑗 .
Proposition 5:
If the propagation delay 𝐷𝑗 is known, which means the source node can know
whether no reception is due to no transmission from the source node or
transmission but failed, according to the historical observations of the
𝑗
destination node, 𝑃̂S,MS becomes (𝑠𝑗 + 1)/(𝑀𝑗 + 2) where 𝑀𝑗 is the number of
𝑗
actual transmissions and 𝑃̂S,UNF = 𝑠𝑗 /𝑀𝑗 .
Proposition 6:
If the propagation delay is unknown, which means the source node can
only know the statistics in certain M observations of the destination node,
𝑗
𝑃̂S,MS becomes
𝑠𝑗 + 1 1 𝐼𝑃𝑌𝑗 (𝑠𝑗 + 2, 𝑀 − 𝑠𝑗 + 1)
𝑗
𝑃̂S,MS =
(13)
𝑀 + 2 𝑃 𝑗 𝐼𝑃𝑗 (𝑠𝑗 + 1, 𝑀 − 𝑠𝑗 + 1)
𝑗
𝑌
𝑌
where 𝑃𝑌 = 1 − 𝑒 −𝜆𝑗 ∆𝑡𝑗 and 𝐼𝑥 (𝑎, 𝑏) is the regularized incomplete beta
function, and
𝑗
𝑗
𝑃̂S,UNF = 𝑠𝑗 ⁄(𝑀𝑃𝑌 )
(14)
equal to 0. The a posteriori
can be straightforward derived as
5/15
𝑗
When 𝑃𝑌 = 1, (13) and (14) are degenerated to the results of Proposition 4.
Proposition 6 also suggests the estimators according to the traffic mode of the
source node with the parameter 𝜆𝑗 of the Poisson process.
3) Applications: Propositions 4 and 5 offer simple estimators for the inference
̂ 𝑆 = [𝑃̂S1 , 𝑃̂S2 , … , 𝑃̂S𝐾 ]𝑇 in different traffic modes
of success probability 𝑷
(deterministic and Poisson packet arrival) of the source node, which are
accomplished according to the historical observations of receptions at the
destination node. They can be easily extended to many tomography cases for
upper-layer CRN functions. For example:
Corollary 2: (Opportunistic Routing) In the traditional reactive routing
protocols such as AODV or DSR, the source node spreads packets containing
routing information to get feedback from other nodes and so as to determine a
reliable routing path to the destination node. In CRN, the opportunistic routing
becomes a promising routing concept for the unreliably links with general none
zero packet-loss probability, in which all nodes involving in the route discovery
phase may be applied the proposed model to determine the best one of
neighboring nodes for data forwarding. Suppose that the source node has to
select one relay node from a set of $K$ candidate numbered neighboring relay
nodes to route packets. A straightforward selection with high reliability is to
𝑗
select the 𝑘-th relay path where 𝑘 = arg 𝑗 max 𝑃̂𝑆 for 𝑗 = 1 to 𝐾.
A. Multichannel MAC
Cognitive Radio (CR) has been considered as a promising technology to
enhance spectrum/channel efficiency while primary systems (PSs) are with
relatively low utilization. It is feasible to allow CR (i.e. unlicensed users) to
exploit the spectrum/channels when PS is idle. Theoretically speaking, the
overall spectrum utilization will be improved by the media access of CRs. From
CR’s point of view, the inherent characteristic of CR media access control
(MAC) is a multichannel environment where channels are preoccupied some
primary system with no precaution of CRs. The MAC under CR paradigm is
depicted as Fig. 4. For reliable CR media access, CR must properly select an
accessing channel, avoid interference with PS transmission, and resolve
contention between CRs. As a result, the multichannel MAC problem under CR
paradigm can further been divided into the two components 1) Channel
Selection and 2) Contention Avoidance/Resolution.
Channel 1
Channel 2
…
...
Path G1
...
PS1
Path G2
PS2
PSX
CR1
CR2
...
...
Channel Selection
CRY
Fig. 4 Multichannel Media Access Problem under CR Paradigm
Collision avoidance/resolution [14] is inherited from the conventional MAC.
However, CR, categorized as secondary users, must perform spectrum sensing
before accessing the channel in avoidance of interference with PS. Moreover,
the potential CR competitor for channel access is no more static in consideration
of dynamic CR access. On the other hand, channel selection which considers
distributed selection of communication channel is now a new challenging issue
of multichannel MAC for CR which recently attracts most research efforts [22],
[9], [10]. The design goal of multichannel MAC aims at distributedly ignition of
parallel transmission over multichannel [10].
...
Destination
node nD
.
.
.
…
Channel X
...
...
Source
node nS
Contention
Avoidance/Resolution
…
…
…
Path GK
...
Fig 3. Cooperative opportunistic relay network.
3. Multi-channel MAC [黃柏堯]
6/15
of two parts: spectrum sensing for inter system (CR-PS) contention avoidance/
resolution, and intra system (CR-CR) contention avoidance/resolution
mechanism. In this paper, we give and analyze a protocol with a slotted nonpersistent CSMA.
C. Performance Evaluation
We analyze the general multichannel MAC using a discrete time Markov
chain (DTMC) model. CR is assumed to have single buffer and a traffic pattern
follows a Poisson arrival with parameter 𝜆 . The retransmission policy is
geometric with parameter 𝑞𝑅 . Let 𝑋𝑡 denotes the number of backlogged CRs at
the beginning of a given frame 𝑡. Then {𝑋𝑡 } forms a DTMC. The state space of
𝑋𝑡 is defined as: 𝒮 = {0,1, … , 𝑌} . Let 𝑄𝐴 (𝑎, 𝑖) be the probability that 𝑎 unbacklogged CRs attempt to transmit packets in a given frame, and that
𝑄𝑅 (𝑏, 𝑖)be the probability that 𝑏 backlogged node attempt to retransmit. We
have:
𝑄𝐴 (𝑎, 𝑖) = (𝑌−𝑖
)(1 − 𝑞𝐴 )𝑌−𝑖−𝑎 𝑞𝐴𝑎 ; 𝑄𝑅 (𝑏, 𝑖) = (𝑏𝑖 )(1 − 𝑞𝑅 )𝑖−𝑏 𝑞𝑅𝑏 (15)
𝑎
Where 𝑞𝐴 = 1 − 𝑒 −𝜆𝑙 is the probability of packet arrival for un-backlogged
CR within a frame with duration 𝑙 . The number of CR attempting channel
access is therefore 𝑎 + 𝑏 with probability 𝑄𝐴 (𝑎, 𝑖)𝑄𝑅 (𝑏, 𝑖) . Define a
multichannel contention resolution/avoidance function Ω(𝑠, 𝜔, 𝑥) where its
value represents the probability that there are 𝑠 successful transmission CRs out
of 𝜔 attempting CRs over channel 1, 2, …, 𝑥 . For contention
avoidance/resolution on a specific channel 𝑥, define 𝑔𝑥 (𝑛) as the probability
that the channel is successfully utilized by CR when there is 𝑛 CR attempters.
We have:
Fig. 5 General multichannel MAC under CR paradigm and a CSMA-based
multichannel MAC for CRs
B. General MAC Protocol Framework
The multichannel MAC of CR is characterized by: {𝑋, 𝑌, 𝐶, 𝑞𝑥 }. 𝑋 is the
number of channels and channel 𝑥 is supposed to be independently occupied by
some PS with probability 𝑞𝑘 . Let Y and denote the number of CRs and let 𝐶
denote the average channel capacity. For multichannel under CR paradigm, we
evaluate 1) the aggregated throughput 𝑇 defined as the aggregated physical
layer throughput over all channels, and the 2) average channel utilization 𝑈,
defined as the average number of channels being successfully utilized for data
transmission, normalized by the number of channel. Note that 𝑈 is equivalent to
traditional MAC ‘’throughput” defined as the number of successful
transmission per channel per slot.
Consider a slotted and synchronous MAC with a perfect physical layer, the
generalized multichannel MAC problem is depicted in Fig. 5. Multiple CRs
seek channel opportunity to access. After selecting channel at the beginning of a
frame, the operation frame is further divided into three phases: 1) Spectrum
sensing, 2) (CSMA) Contention 3) Data Transmission. The generalized channel
selection algorithm is defined as 𝛤 = {𝑝1 , 𝑝2 , … , 𝑝𝑋 } = {𝑝𝑥 }, where 𝑝𝑥 is the
probability of selecting channel 𝑥 The contention avoidance/resolution consists
𝜔
Ω(𝑠, 𝜔, 𝑥) = ∑
𝑛=0
Ω(𝑠, 𝜔 − 𝑛, 𝑥 − 1)𝑝𝑥𝑛 [1 − 𝑔𝑥 (𝑛)]
+ Ω(𝑠 − 1, 𝜔 − 𝑛, 𝑥 − 1)𝑝𝑥𝑛 𝑔𝑥 (𝑛)
(16)
Note that Ω(1, 𝑛, 0) = 𝑔0 (𝑛) and Ω(0, 𝑛, 0) = 1 − 𝑔0 (𝑛) ; Ω(𝑠, 𝜔, 𝑥) is
recursively solved where 𝑝𝑥 is related to the channel selection algorithm 𝛤 and
𝑔𝑥 (𝑛), take non-persistent CSMA random back-off and with perfect spectrum
sensing as an example:
𝑁𝑐𝑤 −1 𝑛
1
𝑖 + 1 𝑛−1
𝑔𝑥 (𝑛) = 𝜙𝑥 ∑
( )(
) (1 −
)
(17)
1 𝑁𝑐𝑤
𝑁𝑐𝑤
𝑖=0
where 𝑁𝑐𝑤 is the contention window size; 𝜙𝑥 is the channel availability
estimated by physical layer, note 𝑞𝑥 = 1 − 𝜙𝑥 with perfect spectrum sensing.
The transition probability of such Markov Chain can further be derived as:
7/15
𝑃𝑖𝑗 =
𝛺(𝑠, 𝑎 + 𝑏, 𝑋)𝑄𝐴 (𝑎, 𝑖)𝑄𝑅 (𝑏, 𝑖) (18)
∑
𝑖+𝑎−𝑠=𝑗
0≤𝑎≤𝑌−𝑖;0≤𝑏≤𝑖;𝑠≤𝑎+𝑏
With the transition probability matrix P = {𝑃𝑖𝑗 }, we can solve the limiting
probability 𝜋 = {𝜋𝑖 } of the Markov chain. With the limiting probability, the CR
normalized (𝑈) /aggregated (𝑇) throughput can further be derived. Define the
protocol efficiency 𝜂 as the portion that a multichannel MAC protocol utilizes
channel capacity in a frame. The throughput can be derived as:
𝑌
𝑈=
1
∑
𝑋
𝑌
𝑇=∑
𝑖=0
𝑠𝛺(𝑠, 𝑎 + 𝑏, 𝑋)𝑄𝐴 (𝑎, 𝑖)𝑄𝑅 (𝑏, 𝑖)𝜋𝑖 (19)
∑
𝑠,𝑎,𝑏
𝑖=0
0≤𝑎≤𝑌−𝑖;0≤𝑏≤𝑖;𝑠≤𝑎+𝑏
∑
𝐶𝜂 ∙ 𝑠𝛺(𝑠, 𝑎 + 𝑏, 𝑋)𝑄𝐴 (𝑎, 𝑖)𝑄𝑅 (𝑏, 𝑖)𝜋𝑖 (20)
𝑠,𝑎,𝑏
0≤𝑎≤𝑌−𝑖;0≤𝑏≤𝑖;𝑠≤𝑎+𝑏
D. Simulation Results
With the general multichannel MAC framework, Fig. 6 illustrates the analytic
and the simulation results of multichannel MAC for CR. The simulation
1
parameters are with 𝑋 = {10,20,30}; 𝑝𝑘 = ; 𝑁𝑐𝑤 = 5; 𝑞𝑅 = 0.2; 𝑞𝑥 = 0.05.
𝑋
The simulation results validate the Markov Chain based analytic model,
providing a basic understanding and parameter dependence about the
performance of multichannel MAC. With the parameter setting, the optimal
normalized throughput of the multichannel MAC is about 0.7 in the presence of
PSs. From the simulation results, with higher arrival rate 𝜆, CRs approach to the
maximum throughput provided by the multichannel faster, then, it saturates and
drops quickly and vice versa. Further stabilization mechanisms are promising
approaches to improve the multichannel MAC performance.
Fig. 6 Normalized Throughput U via attempt rate G with different number
of channels
4. Distributed Spectrum Sharing [林祐瑜]
Since distributed spectrum sharing fully exploits the autonomic property of
CR nodes, the distributed scenario, which is classified by cooperative and noncooperative spectrum access, has received considerable research interests. In
cooperative distributed spectrum sharing, coalitions consist of several CR nodes
are formed in which spectrum sharing is performed via information exchange or
bargaining among the group [15]. On the other hand, in the non-cooperative
scheme, CRs make decision individually based on locally defined payoff
function and are thus considered selfish. When we consider a set of selfishly
behaved users embedded with cognition capability that results in the increment
of a priori knowledge and rationality, game theory provides a well-suited model
that describes the behavior of such intelligent nodes. Several spectrum sharing
mechanisms based on game theoretical view have been developed. In [2], power
allocation over shared bands is considered. A game theoretical version of waterfilling algorithm is proposed for both static and repeated games. An economic
8/15
view of spectrum sharing is modeled as a market competition process developed
in [5]. However, in most cases, only partial spectrum information is obtainable
due to limited sensing capability of CRs. The available channels are assumed to
be known for all CRs in [2][5], which is hard to achieve in practical operation.
In [7], a mixed strategy equilibrium that solely depends on the probability of
spectrum availability for spectrum access is derived. Nevertheless, since CRs
are able to fetch spectrum information in sensing period, the sensing result can
be regarded as side information in decision making of spectrum access, and is
not considered in spectrum access strategy [7].
In the distributed spectrum sharing scenario to be introduced, we practically
deal with the case in which only partial spectrum information is available for
individual CR and the spectrum sensing result as side information is utilized to
design the spectrum access strategy. This is a joint consideration of the
scenarios of previous efforts in [2][5][7]. The model also includes the individual
sensing capability of CRs by which CRs capture spectrum information in
absence of public spectrum information. Maximin criterion is applied to design
with respect to the worst channel access strategy of the opponents. We propose
algorithms to determine spectrum access strategy and demonstrate that the
algorithms prevent the system from collision in large network. Numerical
results are presented in comparison with random and proportional channel
selection and the proposed algorithms show superiority in system throughput
over the other strategies in both scenarios.
CR-MS-Tx in which the decision on the channel to be used is carried. This way,
the agreement on the channel usage between CR-MS-Tx and CR-MS-Rx is
accomplished and the link between CR-MS pairs is established for data
transmission with period t sac .
treq
PR Request
t
t sac
s
CR sensing
CR Access
PR Access
td
t pac
td 1
Fig. 7. Superframe structure of slotted operation for spectrum access
The wireless network is composed of 𝑋 PR-MSs, each of which
corresponding to a licensed band, forming a set of numbered licensed
channels {1 … 𝑋}. A number of 𝑌 unlicensed CR-MSs coexist in the cell and are
allowed to access the channel based on their spectrum sensing result. Here we
use 𝑦 as the CR-MS index and 𝑥 as the channel index. The spectrum
information obtained by the 𝑦𝑡ℎ CR-MS in [𝑡𝑑 , 𝑡𝑑+1 ] is denoted by the indicator
function 𝐙 𝑦 (d) = {𝐼𝑦,𝑥 (d)}, where
1
if channel x is available
if channel x is occupied
𝐼𝑦,𝑥 (d) = { 0
𝑢𝑦,𝑥
for unknown channel state
Due to limited sensing capability, the uncertainty of channel availability is
modeled as a Bernoulli random variable 𝑢𝑦,𝑥 with the sensing result for each
CR-MS pair is correct. A further assumption is that the belief of the traffic
loads of PR-MSs,which is associated with 𝜙𝑦,𝑥 , is the same among those CRMSs with uncertainty in the channel availability and we can therefore denote the
parameter of Bernoulli random variable 𝑢𝑦,𝑥 , 𝜙𝑦,𝑥 , as 𝜙𝑥 , which is independent
of the CR-MS index.
A CR-MS ends up in one of the three possible outcomes at the end of the
spectrum access phase: (i) the CR-MS successfully transmits 𝑏𝑥 bits via channel
𝑥 when it is the only user accessing the band (ii) collision occurs if either any
other CR-MS transmits on the same band simultaneously or the band is
occupied by the licensed PR-MS, leading to a collision cost denoted by 𝑐, where
𝑐 < 0 (iii) the CR-MS does not transmit in the period, resulting in the payoff 0.
We assume additive white Gaussian noise (AWGN) time invariant channel and
the received power for CR-MSs are the same. Also, two CR-MSs do not
interfere with each other as long as they operate in different channels. In this
A. System Model
We consider a wireless network consisting of Primary Mobile Stations (PRMSs), Cognitive Radio Mobile Stations (CR-MSs), and Spectrum Agent (SA) :
‧ PR-MSs is a set of licensed users each of which transmits on a fixed
licensed band.
‧ Spectrum agent accumulates spectrum access requests from PR-MSs.
‧CR-MSs is a set of unlicensed users. A CR-MS is composed of a CR-MS
transmitter (CR-MS-Tx) and a CR-MS receiver (CR-MS-Rx).
PR-MSs and CR-MSs follow a perfectly synchronized time-slotted mechanism
defined by the superframe as shown Fig. 7. A superframe is defined in time
interval [𝑡𝑑 , 𝑡𝑑+1 ], where 𝑑 ∈ 𝑍 + is the discrete time index. The superframe
begins with the time slot in which SA gathers spectrum access requests from
PR-MSs for t req . The spectrum requisition period is followed by the PR-MS
data transmission slot lasting for t pac . At the time PR-MS transmission is
activated, CR-MS-Txs listen for the spectrum information via CR-MS-Tx
sensing. Spectrum sensing period takes tme t s . As the spectrum access strategy
is determined by the CR-MS-Tx, CR-MS-Rx listens for the preamble from the
9/15
case the allowable transmission rate on a given band is constant regardless
which CR-MS uses it. Each CR-MS determines a set of strategy profile, 𝑆𝑦 =
{𝑝𝑦,0 , 𝑝𝑦,1 . . . , 𝑝𝑦,𝑋 } , indicating that the 𝑦𝑡ℎ CR-MS accesses channel 𝑥 with
probability 𝑝𝑦,𝑥 for x= 1 … 𝑋 and does not access any channel with probability
𝑝𝑦,0 . The decision is only applicable in a superframe and must be re-determined
based on the spectrum information derived in other superframes. The expected
payoff 𝑈𝑦 (𝑑) over the strategy profile of the 𝑦𝑡ℎ CR-MS in [𝑡𝑑 , 𝑡𝑑+1 ] is
𝑈𝑦 (𝑑) = ∑𝑋
𝑝𝑦,𝑥
𝑥=1
𝐼𝑦,𝑥 (𝑑)=1
+ ∑𝑋
𝑝𝑦,𝑥
𝑥=1
𝐼𝑦,𝑥 (𝑑)=𝑢𝑦,𝑥
makes CR1 be indifferent to the strategy chosen by its opponents. That is, the
expected payoff of CR1 under maximin criterion shall be equalized regardless
of the strategy, access or wait, taken by CR2. The strategy named in equalizer
rule can be explicitly found by solving the set of equations,
𝑐𝑝1,1 + 𝑏2 𝑝1,2 = 𝑏1 𝑝1,1 + 𝑐𝑝1,2
(231)
𝑝1,1 + 𝑝1,2 = 1
(232)
we have the maximin strategy profile for CR1:
{𝑐 [1 − ∏𝑌𝑗=1(1 − 𝑝𝑗,𝑥 )] + 𝑏𝑥 ∏𝑌𝑗=1(1 − 𝑝𝑗,𝑥 )}
𝑗≠𝑦
𝑗≠𝑦
𝑆1 = {0,
,
𝑏1 −𝑐
}
(24)
Note that the strategy profile in (24) is feasible if and only if it brings positive
payoff function. Otherwise, CR1 shall choose not to access any channel with
probability 1. To generalize for a scenario with 𝑌 users and 𝑋 channels, we
begin with the following lemmas:
Lemma 4: A CR-MS assigns probability 0 on those channel with
𝐼𝑦,𝑥 (𝑑) = 0 𝑜𝑟 (𝐼𝑦,𝑥 (𝑑) = 𝑢𝑦,𝑥 𝑎𝑛𝑑 (𝑏𝑥 + 𝑐)𝜙𝑥 − 𝑐 < 0)
□
Lemma 4 is a procedure of eliminating dominated strategy: Accessing channels
occupied by PR-MSs and unknown channels bringing negative payoff even
when no other CR-MSs access the channel is dominated by not accessing any
channel. Thus in the following, when referring to “𝑋 channels,” we excludes
those satisfying conditions in Lemma 4.
Lemma 5: In the scenario with 𝑌 users and 𝑋 channels, if the number of
channel assigned with positive probability 𝑋 ≤ 𝑌 − 1 for the CR-MS, the
maximin strategy for the CR is not to access any channel with probability 1.
Proof: It is obvious since the worst profile is that all the channels are
occupied by at least one CR-MS.
□
Inspired by Lemma 5, we can think of the other 𝑌 − 1 CRs as a single
opponent-“environment.” The worst that the environment can harm the CR is to
occupy at most 𝑌 − 1 bands, which we term as “worst case combination” in the
following. Therefore, any strategy of the environment that occupies less than
𝑌 − 1 bands is not of our concern in finding maximin strategy. The following
Lemma is another example:
Lemma 6: In the scenario with 𝑌 users and 𝑋 channels with 𝑋 = 𝑌 . The
equalizer rule is maximin if the expected payoff is greater than 0. The maximin
strategy is
{𝜙𝑥 [𝑐 (1 − ∏𝑌𝑗=1 (1 − 𝑝𝑗,𝑥 )) + 𝑏𝑥 ∏𝑌𝑗=1(1 − 𝑝𝑗,𝑥 )] +
𝑗≠𝑦
𝑏2 −𝑐
𝑏1 +𝑏2 −2𝑐 𝑏1 +𝑏2 −2𝑐
𝑗≠𝑦
(1 − 𝜙𝑥 )𝑐}
(21)
To highlight, the expected payoff depends on not only the strategy profile of the
𝑦𝑡ℎ CR-MS but also that of other CRs, indicating that for a CR-MS intending to
maximize its payoff, it should not be ignorant of other users’ strategy profiles.
Thus, we are motivated to use game theoretical model to deal with the
distributed spectrum access problem. In the following section, we derive
different approaches to find out the equilibrium solution for both public and
private spectrum information.
B. Spectrum Access Strategy
Since it is not always the case that there’s an SA broadcasting the
information to CR-MSs, individual CR-MS makes decision solely depending on
the private spectrum sensing information. In absence of the spectrum sensing
results of the other CR-MSs, a CR-MS is not able to find a global equilibrium
solution without the knowledge of its opponents’ channel access strategies. The
design philosophy for each CR turns out to be the maximin criterion, i.e. A CRMS determines the strategy profile such that
∗
∗
∗
𝑆𝑦 = {𝑝𝑦,0
, 𝑝𝑦,1
. . . , 𝑝𝑦,𝑋
} = argmax𝑆𝑦 (𝑚𝑖𝑛𝑆−𝑦 𝑈𝑦 (𝑆𝑦 , 𝑆−𝑦 )
(22)
where 𝑆−𝑦 is the strategy profile for all CR-MSs other than CR 𝑦 .
We start by exploring the two-user and two-channel case. Let the spectrum
information obtained by CR1 be 𝒁1 (𝑑) = {1,1}. Assume the strategy profile of
∗
∗
CR1 is 𝑆1 = {0, 𝑝1,1
, 𝑝1,2
}. The maximin strategy is the strategy profile that
10/15
∗
𝑝𝑦,𝑥
=
0
𝑋
𝑋
Proof: It can be easily checked that 𝐶𝑌−1
− 𝑋 out of 𝐶𝑌−1
equations are
redundant. By eliminating the equivalent equations, we get only 𝑋 equations as
described above.
□
In summary, to find out the maximin strategy profile in the scenario with 𝑌
users and 𝑋 channels, a CR-MSs should refer to the equalizer rule; nevertheless,
it might be too pessimistic to equalize over all the 𝑋 channels especially when
the cost of collision is low. Certain degree of persistency is allowed in this case.
Based on the above Lemmas, we propose the following algorithm to find out the
maximin strategy profile.
Proposition 7: In the scenario with 𝑌 users and 𝑋 channels, where 𝑌 < 𝑋, we
find the maximin strategy profile following the procedures below:
(i) Select 𝑥 = 𝑌 channels with the largest benefits
(ii) Find equalizer strategy profile over the channels selected in (i), and assign
probability 0 on those not selected.
(iii) Calculate the equalized payoff in (ii)
(iv) Set 𝑥 = 𝑌 + 1 and repeat (i)-(iv) till 𝑥 = 𝑋 + 1
The maximin strategy profile is determined by choosing the profile bringing the
largest equalized payoff calculated in (iii). If the largest payoff is smaller than
□
0, choose not to access with probability 1.
𝑖𝑓 𝐼𝑦,𝑥 (𝑑) = 0 𝑜𝑟 (𝐼𝑦,𝑥 (𝑑) = 𝑢𝑦,𝑥 𝑎𝑛𝑑 (𝑏𝑥 + 𝑐)𝜙𝑥 − 𝑐 < 0)
𝑝
∏𝑋
𝑗=1,𝑗≠𝑦(𝑏𝑗 −𝑐)𝜙𝑗
𝑝
𝑋
∏
𝑗=1,𝑗≠𝑥(𝑏𝑗 −𝑐)𝜙𝑗
∑𝑋
𝑝
𝑖=1
(𝑏𝑖 −𝑐)𝜙
𝑖
𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
(25)
{
𝑝
𝑝
where 𝜙𝑗 = 𝜙𝑗 if channel 𝑗 is in unknown status and 𝜙𝑗 = 1 if channel 𝑗 is not
occupied.
∗
∗
Proof: For the equalizer rule {𝑝1,1
. . . , 𝑝1,𝑋
}, the deviation version can be
∗
∗
written as {𝑝𝑦,1 + 𝜖1 , . . . , 𝑝𝑦,𝑋 + 𝜖𝑋 } with ∑𝑋𝑥=1 𝜖𝑥 = 0 . The strategy profile
achieves smaller payoff than the equalized one under the case that the channels
with 𝜖𝑥 > 0 are occupied. The result in (25) is simply an extended version of
(24) .
□
The next Lemma shows the role of the equalizer rule in finding the maximin
strategy.
Lemma 7: In the scenario with 𝑌 users and 𝑋 channels, a profile that does not
equalize the opponents’ pure strategy worst case combination cannot be a
maximin strategy.
∗
∗
Proof: Consider a small deviation from the equalizer rule, say{𝑝𝑦,1
, … , 𝑝𝑦,𝑗
−
∗
∗
𝜖, . . . , 𝑝𝑦,𝑖 + 𝜖, … , 𝑝𝑦,𝑋 }, where channel 𝑗 is the one that the opponents access in
the profile that brings least payoff, and the channel 𝑖 is the one that is not
occupied by other CR-MSs. It is clear that the payoff is improved under the
pure strategy profile. We can find 𝜖 > 0 which is small enough such that the
order of the payoff for the pure strategy profile of the opponents remains. Thus,
the worst case pure strategy is improved. In that case, the deviation from
equalizer rule cannot be maximin strategy.
□
From Lemma 7, we see that an unequalized payoff can always be improved
via an equalizer rule. In the scenario described in Lemma 6, it is proved that the
maximin strategy is uniquely determined by solving 𝑋 equations (worst
combination of opponents) with 𝑋 variables (strategy profile). However, in the
case with 𝑌 ≤ 𝑋 − 1, we have more equations than variables. The following
Lemma shows how we find the equalizer rule.
Lemma 8: In the scenario with 𝑌 users and 𝑋 channels, to find the equalizer
rule that equalizes all channels, we formulate 𝑋 equations, which are the
expected payoff under 𝑋 different worst case combination of opponents with
any two of the combinations differ in only one channel assignments. For
example, for 𝑋 = 4 and 𝑌 = 3 , a user should equalize the environment’s
strategy that channel {1,2}, {2,3}, {3,4}, {1,4} are occupied.
C. Simulation Result
We assume that there are 10 unoccupied channels. The benefits for
successful transmission are: 9.17, 2.69, 7.65, 1.89, 2.88, 0.91, 5.76, 6.83, 5.46,
and 4.26. Also, we have one more channel with benefit 2.51 in unknown status
with available probability 0.3. Collision payoff is assumed to be -1. The total
benefit is defined as the summation of the channel benefit for
successful transmission plus the cost for collision. Simulation results are
averaged over 10000 times iteration. The result is compared with random
channel assignment and proportional mixed strategy assignment. For the
random assignment, CRs access each channel with equal probability; whereas
for the proportional assignment, CRs access channel 𝑥 with probability 𝑏𝑥 /
∑𝑋𝑥=1 𝑏𝑥 demonstrate the performance of maximin strategy in Proposition 7 as
shown in Fig. 8. It can be seen that the maximin strategy outperforms the other
two strategy profiles at the worst case channel assignment of the opponents at
any number of CR-MSs in the network due to the fact that the proposed
algorithm is optimal in the sense of maximin criterion. The individual worst
case benefit of the proposed algorithm is more than that of random access by
0.5 and than that of proportional assignment by 1. In large network, due to the
conservation property under maximin criterion, CR-MSs choose not to transmit
11/15
when the number of opponents is more than the number of channels bringing
positive benefit and thus keep the worst case of benefit at 0.
To conclude, when considering distributed spectrum sharing, the total
number of CRs accessing the channels is not limited in absence of a centralized
controller. In this case, despite the improvement in spectrum utilization,
frequent packet collisions among CRs result in degradation in system
throughput. We proposed distributed mechanisms to ensure system throughput
even in large network from the game theoretical view. A non-cooperative game
model is applied in describing the spectrum access competition among CRs. We
also pioneered utilize the most realistic spectrum sensing result in which
imperfectness due to limited sensing capability of CRs was taken into
consideration. The spectrum information with imperfection was used as side
information to aid individual CR in determining the optimal spectrum access
strategy. Numerical results showed that for the scenario with only private
spectrum information obtainable, the proposed algorithm designed under
maximin strategy profile assured the optimal benefit achievable under worst
case condition. CRs are prohibited from activating transmission under selfenforcing mechanism, preventing the system from collision as well.
5. Routing and Control of CRN
A. Opportunistic Routing [林士鈞]
When facing the increasing demand o the spectrum, the concept of the CR
comes up for the underutilized spectrum. Dynamic spectrum access (DSA)
helps the CRs to fulfill the sufficient spectrum usage by using the spectrum hole
provided by the licensed PS. CRs can share the spectrum with PSs as long as
PS’s Qos is guaranteed, i.e. CRs is the link level technology requiring to sense
the spectrum of PSs being ”available”, then transmits packets to the receiving
node. In order to avoid the interference to the PS, the CRs share the medium in
an opportunistic way, i.e. establishing the opportunistic links between the CRs
and between the CR and the PS. Here comes quite a lot difference in such a
cognitive radio network with the wireless ad hoc (or sensor) networks.
However, operations of CRs shall not be limited to the link level. The
dynamically available of the CR links makes a new challenge when considering
the routing of the networking mechanism. Since each link is opportunistic
available for CRs, providing a workable and reliable route seems be a difficult
task. The concept of user cooperation which allows a source assisted by the
intermediate nodes explores the cooperative diversity and offers a significant
performance gain advantage. Although most existed routing protocols still think
the overhearing by the broadcast nature of the wireless environments which be
used for the cooperation purpose is the typical drawback that should be conquer,
the new coming opportunistic routing make cooperative diversity efficient and
practical on commodity hardware with the better throughput performance.
As being suitable for the routing of the wireless ad hoc (multi-hop) network,
Opportunistic routing considers the broadcast nature of the wireless
environment. When a node sends a packet through the air, all of the nodes in the
network may hear the packet. There is a link between each pair of the nodes in
the network. Opportunistic routing also considers the lossy nature of the
wireless environment. Due to the layer abstraction of data-link layer and
network layer, wireless networks suffer the unsuccessful transmission mainly
from the packet loss. Each link between two nodes owns a delivery probability,
which decreased with the distance increased. Since the delivery probability is
equal to one minus loss probability, i.e. the packet sends from the one side node
won’t be received by the other node with the probability in ergodic sense, each
attempt to transmit a packet can be considered as a Bernoulli trial. We formulate
6
Maximin
Random
Proportional
Individual CR Benefit (Worst Case)
5
4
3
2
1
0
-1
2
3
4
5
6
7
Number of CRs
8
9
10
11
Fig. 8. Individual CR-MS benefit under worst case
12/15
the delivery ratio of the jth link in the nth time interval [tn,tn+1) is
d nj . With the
1 Pj 01
n
consideration of the above points, the wireless network can be modeled as all
pairs of the nodes are linked with a delivery probability assigned.
In order to avoid the interference to the PS, CRN links are available under
idle duration of PS that DSA can effectively fetch such opportunities, after
successful spectrum sensing. Link available period in CRN is in the range of
mil-seconds which gives CRN topology to be random even under all nodes
being static. We model the system according to the time slotted perspective. In
each time slot, PS would appear for the transmission with a probability. Once
the action is happened, it would hold until the end of the slot. It means if the
action taken by PS is not showing up, the whole slot is available for CR’s use
without being interrupted from PS’s traffic. An embedded continuous-time
Markov chain with the rates obtained from the statistics of spectrum
measurement is considered. The state transition diagram of the jth link in the nth
time interval [tn,tn+1) is shown in Fig. 10.
We formulate the available probability of the jth link in the nth time interval
[tn,tn+1) following a Bernoulli process as
nj
Pjn10
1
(Available)
R1
B. HARQ [歐永俊]
In [1][18][24], coded cooperation HARQ scheme is introduced. It integrates the
idea of cooperative communication and HARQ. Incremental redundancy is
generated through cooperative relay in order to exploit spatial diversity.
Bidirectional link is assumed in the above scheme.
In cognitive radio network, however, there exist a lot of unidirectional
links due to avoiding interference with primary users. Link level HARQ based
on feedback channel is frustrated. We now introduce the new idea of session
level HARQ. Error control is performed at session level (end-to-end) between
the source and the destination. We generate a coded packet from a message
packet at the source and divide the coded packet into many coded sub-packets.
Then, they are sent over different paths. Decoding is only performed at
destination by combining coded sub-packets that it has received. Link level
error control (acknowledgement between each link) is avoided. Each
intermediate node amplifies and forwards packets to next hop along its
predetermined routing path. A session level ACK (NACK) is only generated by
the destination provided that the origin message is (isn't) successfully recovered.
In the following subsections, link/path model and performance analysis are
provided.
30%
85%
10%
Source
70%
30%
Destination
30%
0
(Unavailable)
Fig. 10. State transition diagram of opportunistic link.
90%
30%
n
n
R2
90%
1 P j1 0
P j1 0
(26)
Pjn01 Pjn10
n
Pj 01
70%
(1). Link and path model
We assume that there exist K link-disjoint paths between the source and the
destination. Each path i, 1 ≤ 𝑖 ≤ 𝐾, has 𝑀𝑖 − 1 intermediate nodes. Each link
between a pair of node is modeled as an independent slow flat Rayleigh fading
channel. The received signal at node 𝑅𝑖,𝑗 is 𝑦𝑖,𝑗 = ℎ𝑖,𝑗 𝑥𝑖,𝑗−1 + 𝑧𝑖,𝑗. Channel gain
ℎ𝑖,𝑗 is Rayleigh distributed. 𝑥𝑖,𝑗−1 is the signal generated from the previous hop
𝑅𝑖,𝑗−1 . 𝑧𝑖,𝑗 is independent zero-mean additive white Gaussian noise with
variance 𝑁0 /2 . Each intermittent node amplifies and forwards the received
R3
Fig. 9. Network model of the wireless ad hoc network for opportunistic routing.
13/15
signal subject to the same signal power constraint 𝐸𝑏 . So, the signal generated
𝐸
2
by node 𝑅𝑖,𝑗 will be 𝑥𝑖,𝑗 = 𝛼𝑖,𝑗 𝑦𝑖,𝑗 , 𝛼𝑖,𝑗
= 2 𝑏
, 𝛼𝑖,𝑗 is the amplifying
ℎ𝑖,𝑗 𝐸𝑏 +𝑁0 /2
2
coefficient. The per hop received SNR is defined as 𝛾𝑖,𝑗 = ℎ𝑖,𝑗
𝐸𝑏 /𝑁0 . It is
exponential distributed with mean ̅̅̅̅
𝛾𝑖,𝑗 . The equivalent end-to-end SNR 𝛾𝑒𝑞 𝑖 of
path i is [19],
𝑀
𝑖
𝛾𝑒𝑞𝑖 = [∏𝑗=1
(1 +
1
𝛾𝑖,𝑗
−1
) − 1]
,1 ≤ 𝑖 ≤ 𝐾
(27)
The probability density function of 𝛾𝑒𝑞 𝑖 is difficult to evaluate and we use the
bound 𝛾𝑒𝑞𝑖 < 𝛾𝑏 𝑖 = min(𝛾𝑖,1 , 𝛾𝑖,2 , … , 𝛾𝑖,𝑀𝑖 ). 𝛾𝑏 𝑖 is exponential distributed with
mean
1
𝛾𝑏 𝑖 = 1 1
̅̅̅̅
,1 ≤ 𝑖 ≤ 𝐾
(28)
1
+
+⋯+̅̅̅̅̅̅̅̅̅
̅̅̅̅̅̅
𝛾𝑖,1 ̅̅̅̅̅̅
𝛾𝑖,2
𝛾𝑖,𝑀𝑖
Fig. 11. Packet error rate with K = 2; 4; 6; 8; 10 corresponds to different degree
of path diversity.
(2) Coding scheme
We assume the rate of the code is 𝑅𝑐 . Message packet size is 𝑊 bits. Coded
packet size is B = W/𝑅𝑐 bits. We divide the coded packet into K coded subpackets and they are transmitted over K different paths. The coded sub-packets
are received, combined and decoded at the destination. The pairwise error
probability
between
two
codewords
can
be
evaluated
as
𝑃(𝑑|𝛾𝑏1 , 𝛾𝑏2 , … , 𝛾𝑏𝐾 ) = 𝑄(√2𝑑1 𝛾𝑏1 + 2𝑑2 𝛾𝑏2 + ⋯ + 2𝑑𝐾 𝛾𝑏𝐾 ). d is the
Hamming distance between the transmitted codeword and the codeword
obtained after decoding. 𝑑𝑖 is the portion of Hamming distance contributed from
the i’th part of the codeword transmitted through path i, 1 ≤ 𝑖 ≤ 𝐾, and 𝑑 =
𝑑1 + 𝑑2 + ⋯ + 𝑑𝐾 . The unconditional pairwise error probability can be
evaluated as
𝜋
−1
−1
𝑑1 ̅̅̅̅
𝛾𝑏
𝑑𝐾 ̅̅̅̅̅
𝛾𝑏 𝐾
1 2
𝑃(𝑑) = ∫ (1 + 2 1 ) … (1 +
)
𝑑𝜃
𝜋 0
sin 𝜃
sin2 𝜃
1
1
1
≤ (
)…(
)
(29)
2 1 + 𝑑1 ̅̅̅̅
𝛾𝑏 1
1 + 𝑑𝐾 ̅̅̅̅̅
𝛾𝑏 𝐾
6. Cognitive Network Selection [鄭欣明]
The concept of cooperative relay can be applied to heterogeneous radio access
technologies (RATs)/networks to generally network cognitive radios and nodes
in coexisting primary networks. Under this generalization, cognitive radio faces
a new challenge to select an appropriate radio access network among
heterogeneous RATs, to form cooperative relay. In other words, a cognitive
radio has to select an appropriate channel, among multiple access points of
multiple radio access networks, rather than opportunistic access a traditionally
specific link in a specific primary system.
To achieve the above goals, the network selection among various radio access
technologies/networks must provide service continuity and Quality of Service
(QoS) guarantees. The existing solutions [17][25] suggest mobile user to gain
knowledge about all heterogeneous RATs in the area of interest through the
negotiation to facilitate the selection. Specifically, mobile user should know the
available bandwidth of surrounding access points to prevent the connection after
selection being dropped due to resource deficiency. With distributed spectrum
sensing among multiple systems and cooperation, cognitive radios can detect
the availability of channels of different RATs and select the most appropriate
We can see that diversity gain of order K is achieved. In figure 11, the message
packet is coded with convolutional code with rate 1/2 and the performance with
different number of paths is shown.
14/15
one according to the gathering information without negotiation between access
points and thus performance of selection is enhanced.
delay. After CR periodically makes a network selection decision, CR updates
location information or establishes security associations with a target access
point in the execution phase.
Fig.12 clearly represents a mobile-initiated cognitive network selection by
utilizing messages and protocols defined in 802.21[8]. In this figure, the
operation is divided into four phases: initiation [6], sensing and reasoning,
decision, and execution phases. In the initiation phase, the CR subscribes two
MIH events for the link parameters report on the serving access point (1). In
particular, CR configures threshold on the serving access point to report radio
measurement when specific thresholds are crossed (2). The type of this
measurement report may indicate an urgent request or just a periodic
informational message. Then CR may detect one of surrounding access points
through (3) and adds it into selection candidates.
MIH
user
Mobile User
MIHF
Serving
RAT
Non-serving
RAT
Serving
Access
Point
Remarks: It is obvious that the proposed cognitive network selection in CR
outperforms the existing ones without spectrum sensing capability in terms of
signaling delay and overhead. As shown in Fig. 10, the explicit negotiations
between access point and user are omitted and thus signaling delay and
overhead can be minimized.
7. Conclusion
Non-serving
Access Point
Initial Phase
1. MIH_Event_Subscribe
Confirm
2. MIH_Link_Configure_Thresholds
Confirm
3. MIH_Link_Detected
Reference
[1] A. Nosratinia, T.E. Hunter, A. Hedayat, “Cooperative communication in
wireless networks,” Communications Magazine, IEEE , Volume 42, No.10,
October 2004, Page(s): 74-80.
[2] B. Etkin, A. Parekh, and D. Tse, “Spectrum Sharing for Unlicensed Bands,”
Proc. IEEE DySPAN, May, 2005.
[3] Cheng-xiang Wang, Hsiao-hwa Chen, Xuemin Hong, M. Guizani,
“Cognitive radio network management,” Vehicular Technology Magazine,
IEEE, Volume 3, Issue 1, March 2008, Page(s):28 – 35.
[4] C. K. Yu and K. C. Chen, "Radio resource tomography of cognitive radio
networks," IEEE Proc. VTC, April 2009.
[5] D. Niyato and E. Hossain, “Competitive Spectrum Sharing in Cognitive
Radio Networks: A Dynamic Game Approach,” IEEE Transactions on
Wireless Communications, Volume 7, No. 7, July 2008, Page(s):2651-2660.
[6] G. Lampropoulos, A. K. Salkintzis, and N. Passas, “Media-independent
handover for seamless service provision in heterogeneous networks,”
Communication Magazine, IEEE, Volume 46, No. 1, January 2008, Page(s):
64–71.
[7] H. E. Lai, H. Gamal, Jiang, and H.V. Poor, “Cognitive Medium Access:
Exploration, Exploitation and Competition,” arXiv, October 2007.
4. MIH_Link_Parameters_Report
5. MIH_Link_Get_Parameters.request
CR
5. MIH_Link_Get_Parameters.respond
5. MIH_Link_Get_Parameters.respond
Sensing and
Reasoning Phase
MIH_MN_HO_Candidate_Query.request
Traditional User
MIH_MN_HO_Candidate_Query.request
MIH_MN_HO_Candidate_Query.respond
MIH_MN_HO_Candidate_Query.confirm
Decision Phase
Execution Phase
Fig. 12. Message flow of cognitive network selection.
When CR receives the first link indication (4) reporting that the RSS of serving
access point is below thresholds setting in (2), it enters the sensing and
reasoning phase to obtain and estimate the system parameters through every
access point (5). On the other hand, legacy user only obtains the information by
querying serving and candidate access points, which introduces significant
15/15
[8] IEEE, “IEEE Standard for Local and Metropolitan Area Networks Part 21:
Media Independent Handover Services,” IEEE Std 802.21-2008, Jan. 2009.
[9] I. Akyildiz, W. Lee, M. Vuran, and S. Mohanty, “Next generation/dynamic
spectrum access/cognitive radio wireless networks: A survey,” Computer
Network, Volume 50, No. 13, September 2006, Page(s):2127-2159.
[10] Jeonghoon Mo, H.-S.W. So, J. Walrand, “Comparison of Multichannel
MAC Protocols,” Mobile Computing, IEEE Transactions on, Volume 7, No.1,
January 2008, Page(s):50-65.
[11] K.C. Chen, R. Prasad, Cognitive Radio Networks, Wiley, 2009.
[12] K. C. Chen, Y. C. Peng, B. K. Centin, N. Prasad, J. Wang, and S. Y. Lee,
"Routing of opportunistic links in cognitive radio networks," to appear in the
Wireless Communication and Mobile Computing.
[22] Q. Zhao and B.M. Sadler, “A Survey of dynamic spectrum access: A
medium access control approach,” Signal Processing Magazine, IEEE , Volume
24, No. 3, May 2007, Page(s):79-89.
[23] S. A. Jafar and S. Srinivasa, "Capacity limits of cognitive radio with
distributed and dynamics spectral activity," IEEE Journal on Selected Areas in
Communications, volume 25, No. 3, April 2007, Page(s):529-537.
[24] T.E. Hunter, A. Nosratinia, “Diversity through coded cooperation,”
Wireless Communications, IEEE Transactions on, Volume 5, No.2, February
2006, Page(s):283-289.
[25] X. Gelabert, J. P´erez-Romero, O. Sallent, and R. Agust´ı, “A markovian
approach to radio access technology seection in heterogeneous
multiaccess/multiservice wireless networks,” Mobile Computing, IEEE
Transaction on, Volume 7, No. 10, October 2008, Page(s): 1257–1270.
[13] K. C. Chen, P. Y. Chen, N. Prasad, Y. C. Liang, and S. Sun, "Trusted
cognitive radio networking," to appear in the Wireless Communications and
Mobile Computing.
[14] K.-C. Chen, “Medium access control of wireless LANs for mobile
computing,” Network, IEEE, volume 8, No. 5, Sep/Oct 1994, Page(s): 50-63.
[15] L. Cao, H. Zheng, “Distributed spectrum allocation via local bargaining,”
SECON, September 2005, Page(s):475-486.
[16] M. Weiser, The computer for the 21st century. Scientific American,
September 1991, Page(s): 94–104.
[17] M. Liu, Z. Li, X. Guo, and E. Dutkiewicz, “Performance analysis and
optimization of handoff algorithms in heterogeneous wireless networks,”
Mobile Computing, IEEE Transaction on, Volume 7, No. 7, July 2008, Page(s):
846–857.
[18] M. Janani, A. Hedayat, T.E. Hunter, A. Nosratinia, “Coded cooperation in
wireless communications: space-time transmission and iterative decoding,”
Signal Processing, IEEE Transactions on, Volume 52, No.2, February 2004,
Page(s): 362-371.
[19] M.O Hasna, M.S. Alouini, “End-to-end performance of transmission
systems with relays over Rayleigh-fading channels,” Wireless Communications,
IEEE Transactions on, Volume 2, No.6, November 2003, Page(s):1126-1131.
[20] N. Devroye, M. Vu, V. Tarokh, “Cognitive radio networks,” Signal
Processing Magazine, IEEE, Volume 25, Issue 6, November 2008, Page(s):12 –
23.
[21] Qian Zhang, Juncheng Jia, Jin Zhang, “Cooperative relay to improve
diversity in cognitive radio networks,” Communications Magazine, IEEE,
Volume 47, Issue 2, February 2009, Page(s):111 – 117.
16/15