Functions of Bounded Variation and Riemann Stieltjes Integral
advertisement

Palestine Polytechnic University
The Second Students Innovative Conference (SIC2013)
June 12,2013- Hebron, State of Palestine
Functions of Bounded Variation and Riemann
Stieltjes Integral
Ala` Khateeb
Olfat Al-Qawasmi
JumanaHamamde
Khawla Al-Muhtaseb
College of Applied Science
Palestine Polytechnic University
Hebron, Palestine
alaa_lulu_alaa@hotmail.com
College of Applied Science
Palestine Polytechnic University
Hebron, Palestine
b1l1u1e@hotmail.com
College of Applied Science
Palestine Polytechnic University
Hebron, Palestine
flowers3000@yahoo.com
College of Applied Science
Palestine Polytechnic University
Hebron, Palestine
khawla@ppu.edu
Abstract__ Functions of bounded variation are a special class
of functions with finite variation over an interval.
Throughout this seminar, we study the behavior of these
functions and give some important theorems to show the
essential properties of function of bounded variation. Next,
we introduce Riemann Stieltjes integration which is a
generalization of the Riemann integral and show the relation
between it and functions of bounded variation.
Keywords-Bounded; Variation; Riemann; Staieltes Integral .
I.
INTRODUCTION
A function of bounded variation is a real-valued
function whose total variation is bounded. In this paper we
discuss function of bounded variation and total variation
definitions, and illustrative theorems to check whether or
not the function is of bounded variation. If the function is
of bounded variation, we calculate the total variation of it.
Then we introduce the Riemann Stieltjes integral and
show its properties. This integral is very important in
probability and other science branches.
We divide this paper into three topics, which can be
summarized as: we begin by giving some fundamental
definitions and theorems needed for our topic. Next we
define function of bounded variation and give some
important theorems, mainly "Jordan Decomposition
Theorem", which shows the close relation between the
function of bounded variation and monotonic functions,
and that the functions of bounded variation are generated
by monotonic functions. Finally, we define Riemann
Stieltjes integral which is a generalization of the Riemann
integral. Some properties of this integral are discussed, we
show the relation between function of bounded variation
and Riemann Stieltjes integral. At last we introduce some
application of the Riemann Stieltjes integral.
II.
PRELIMINERES
Before we define functions of bounded variation, we must
lay some fundamental definitions and theorems in order to
understand this class of functions.
1. Partition: If 𝑎, 𝑏 ∈ ℝ, and [𝑎, 𝑏] is close and bounded
interval, a set of points 𝑃= {𝑥0 , 𝑥1 , … . , 𝑥𝑛 }, satisfying the
inequalities a=𝑥0 <𝑥1 <…<𝑥𝑛−1 <𝑥𝑛 =b is called partition
of [𝑎, 𝑏].
We denote 𝒫([𝑎, 𝑏]) to be the set of all partitions of
[𝑎, 𝑏].
2. Refinement of 𝑷 : A partition 𝑃0 of [𝑎, 𝑏] is said to be
finer than 𝑃 (or a refinement of 𝑃 ) if 𝑃 ⊆ 𝑃0 .
3. Let 𝑓 : [𝑎, 𝑏]→ ℝ be a function. Then 𝑓 is said to be
i. Increasing on [𝑎, 𝑏 ] if for every 𝑥, 𝑦 ∈ [𝑎, 𝑏],
𝑥 < 𝑦 ⟶ 𝑓 (𝑥) ≤ 𝑓 (𝑦).
ii. Decreasing on [a, b] if for every 𝑥, 𝑦 ∈ [𝑎, 𝑏],
x < y⟶ 𝑓 (x) ≥ 𝑓(y).
iii. Monotone if 𝑓 is either increasing or decreasing
on [𝑎, 𝑏 ] .
4. Bounded Function: A function 𝑓 ∶ 𝐴 → ℝ if there
exists a constant 𝑀 > 0 such that |𝑓(𝑥)| ≤ 𝑀for all
𝑥 ∈ 𝐴 is said to be bounded on 𝐴 ⊆ ℝ .
5. Uniformly Continuous Function: Let 𝐴 ⊆ ℝ and let
𝑓: 𝐴 → ℝ.We say that 𝑓 is uniformly continuous on 𝐴 if
for each 𝜀 > 0, there exist a 𝛿(𝜀) > 0 such that if
𝑥 , 𝑢 ∈ 𝐴 are any numbers satisfying | 𝑥 − 𝑢 | < 𝛿(𝜀),
then
| 𝑓(𝑥) − 𝑓(𝑢)| < 𝜀.
(2)
6. Mean Value Theorem: Suppose that 𝑓 is continuous on
a closed interval [𝑎, 𝑏], and that 𝑓 has a derivative in the
open interval (𝑎 , 𝑏).Then there exist at least one point 𝑐 in
(𝑎 , 𝑏) such that
𝑓(𝑏) − 𝑓(𝑎) = 𝑓`(𝑐)(𝑏 − 𝑎).
(3)
1.
Definition 1: Let 𝑓 be defined on a closed bounded
interval [𝑎, 𝑏], if 𝑃 = {𝑥0 , 𝑥1 , … , 𝑥𝑛 } is a partition of [𝑎, 𝑏].
Write
∆𝑓𝑘 = 𝑓(𝑥𝑘 ) − 𝑓(𝑥𝑘−1 )
for 𝑘 = 1, 2, … , 𝑛 (7)
If there exist a positive number 𝑀 such that
∑𝑛𝑘=1|∆𝑓𝑘 | ≤ 𝑀 ∀𝑃 ∈ 𝒫([𝑎, 𝑏])
(8)
where 𝒫([𝑎, 𝑏]) is the set of all partitions of [𝑎, 𝑏], then 𝑓
is said to be of bounded variation on [𝑎, 𝑏].
7. The Norm of a Partition 𝑷 is defined to be the length of
the largest subinterval of 𝑃 and it is denoted by ∥ 𝑃 ∥, that
is, if 𝑃 ={𝑥0 , 𝑥1 , … , 𝑥𝑛 } is partition of [𝑎, 𝑏] then
‖𝑃 ‖ = 𝑚𝑎𝑥{|𝑥𝑘 − 𝑥𝑘−1 |, 𝑘 = 1,2, … , 𝑛}.
(4)
Example 1:
Let 𝑓(𝑥) = 2𝑥 − 1 be a function defined on [0, 2], and let
𝑃 = {𝑥0 , 𝑥1 , … , 𝑥𝑛 } be a partition of [0, 2] then the
variation is given as:
∑𝑛𝑘=1|∆𝑓𝑘 | = ∑𝑛𝑘=1 |(𝑓 (𝑥𝑘 ) − 𝑓 (𝑥𝑘−1 ))| .
Since 𝑓 is increasing on [0, 2] we have,
∑𝑛𝑘=1|∆𝑓𝑘 | = ∑𝑛𝑘=1(𝑓 (𝑥𝑘 ) − 𝑓 (𝑥𝑘−1 ))
= 𝑓(2) − 𝑓(0)
=4.
We conclude that, for any partition 𝑃of [0, 2],
8. Let 𝑆 be a nonempty subset of ℝ :
i.
The set 𝑆 is said to be bounded above if there
exist a number 𝑀 ∈ ℝ such that s ≤ 𝑀 for all
𝑠 ∈ 𝑆. Each such number 𝑀 is called an upper
bound of 𝑆.
ii.
The set 𝑆 is said to be bounded below if there
exist a number 𝑁 ∈ ℝ such that 𝑁 ≤ 𝑠 for all
𝑠 ∈ 𝑆 . Each such number 𝑁 is called a lower
bound of 𝑆.
iii.
A set 𝑆 is said to be bounded if it is both bounded
above and below.
∑𝑛𝑘=1|∆𝑓𝑘 | = 4 .
9. Supremum: If a set 𝑆 is bounded above, then a
number 𝑀 is said to be a supremum of 𝑆 if it satisfies the
conditions:
i.
𝑀 is an upper bound of 𝑆.
ii.
If 𝑣 is any upper bound of 𝑆, then 𝑀 ≤ 𝑣.
2.
Basic Theorems:
Theorem 1: If 𝑓 is monotonic on [𝑎, 𝑏] , then 𝑓 is of
bounded variation on [𝑎, 𝑏].
10. Infimum: If a set 𝑆 is bounded below, then a number
𝑁is said to be an infimum of 𝑆 if it satisfies the conditions:
i.
𝑁 is a lower bound of 𝑆.
ii.
if 𝑡 is any lower bound of 𝑆, then 𝑡 ≤ 𝑁.
Proof:
Let 𝑓 be increasing on [𝑎, 𝑏]. Then for every partition 𝑃 =
{𝑎 = 𝑥0 , 𝑥1 , … , 𝑏 = 𝑥𝑛 } of [𝑎, 𝑏] we have,
∑𝑛𝑘=1|∆𝑓𝑘 | = ∑𝑛𝑘=1 ∆𝑓𝑘 = ∑𝑛𝑘=1(𝑓 (𝑥𝑘 ) − 𝑓 (𝑥𝑘−1 ))
= 𝑓(𝑏) − 𝑓(𝑎).
(9)
Hence, 𝑓 is of bounded variation on [𝑎, 𝑏].
In the same way, we can show that decreasing functions
are of bounded variation on[𝑎, 𝑏].
11. Additive Property Theorem: Given a nonempty
subsets 𝐴 and 𝐵 of ℝ, let𝐶 denote the set
C= {𝑥 + 𝑦: 𝑥 ∈ 𝐴 , 𝑦 ∈ 𝐵}
(5)
If each of 𝐴 and 𝐵 has a supremum, then 𝐶 has
a supremum and
𝑠𝑢𝑝 𝐶 = 𝑠𝑢𝑝 𝐴 + 𝑠𝑢𝑝 𝐵.
(6)
III.
Definition of Function of Bounded Variation:
Theorem 2: If 𝑓 is continues on [𝑎, 𝑏] and differentiable
on (𝑎, 𝑏), such that 𝑓` is bounded, then 𝑓 is of bounded
variation on [𝑎, 𝑏].
FUNCTIONS OF BOUNDED
VARIATION: DEFINITIONS AND
THEOREMS
Proof:
Since 𝑓` is bounded on an open interval (𝑎, 𝑏), ∃ 𝐴 such
that
| 𝑓`(𝑥)| ≤ 𝐴
for all 𝑥 in (𝑎, 𝑏)
Let 𝑃 = {𝑥0 , 𝑥1 , … , 𝑥𝑛 } be any partition of [𝑎, 𝑏] , by
applying
the
Mean
Value
Theorem
to 𝑓
on [𝑥𝑘−1 , 𝑥𝑘 ], ∃𝑡𝑘 ∈ (𝑥𝑘−1 , 𝑥𝑘 ) such that,
𝑓(𝑥𝑘 ) − 𝑓(𝑥𝑘−1 )= 𝑓`(𝑡𝑘 )(𝑥𝑘 −𝑥𝑘−1 )
and take the summation of both sides, we get:
∑𝑛𝑘=1 |𝑓( 𝑥𝑘 ) − 𝑓(𝑥𝑘−1 )|= ∑𝑛𝑘=1 |𝑓`( 𝑡𝑘 )|(𝑥𝑘 −𝑥𝑘−1 )
≤ 𝐴 ∑𝑛𝑘=1(𝑥𝑘 −𝑥𝑘−1 )
= 𝐴 (𝑏 − 𝑎) < ∞.
Hence, 𝑓 is of bounded variation on [𝑎, 𝑏].
Function of bounded variation is one of the basic concepts
in mathematical analysis, which serves mathematics pure
and applied. In this brief chapter we discuss functions of
bounded variation and total variation definitions, and
illustrative theorems to see whether or not the function is
of bounded variation, and if the function is of bounded
variation, we calculate the total variation of it.
2
Remark:
If 𝑓` is bounded, then 𝑓 dose not necessary be of bounded
1
variation. For example, the function 𝑓(𝑥) = 𝑥 3 is
monotonic, and so 𝑓 is of bounded variation on [𝑎, 𝑏] .
1
−2
However, 𝑓`(𝑥) = 𝑥 3 is not bounded, since
3
𝑓`(𝑥) → ∞ as 𝑥 → 0.
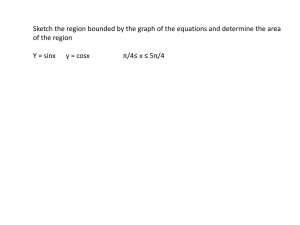
Figure3.
Figure 3. The graph of 𝑥 cos
𝜋
2𝑥
.
Solution:
Clearly |𝑓(𝑥)| ≤ 1, so 𝑓 is bounded.
lim 𝑓(𝑥) = 0 = 𝑓(0)
𝑥→0+
1
implies that 𝑓 is right continues at 𝑥 = 0, so 𝑓 is continues
on [0, 1].
1
1
1 1
Let us take the partition 𝑃 = {0, ,
, … , , , 1}, the
Figure 1. The graph of 𝑓(𝑥) = 𝑥 3.
1
1
−2
Figure 2.The graph of 𝑓(𝑥) = 𝑥 3 .
3
Theorem 3: If 𝑓 is of bounded variation on [𝑎, 𝑏], then 𝑓
is bounded on [𝑎, 𝑏].
=
Proof:
Let 𝑥 ∈ (𝑎, 𝑏), consider the partition 𝑃 of [𝑎, 𝑏] , such that
𝑃 = {𝑎, 𝑥, 𝑏}.
Since 𝑓 is of bounded variation on [𝑎, 𝑏],
∑𝑛𝑘=1 | ∆𝑓𝑘 | = | 𝑓(𝑥) − 𝑓 (𝑎)| + | 𝑓(𝑏) − 𝑓(𝑥) | ≤ 𝑀
so,
|𝑓(𝑥) − 𝑓(𝑎)| ≤ 𝑀
also,
|𝑓(𝑥)| − |𝑓(𝑎)| ≤ |𝑓(𝑥) − 𝑓(𝑎)| ≤ 𝑀 ∀𝑥 ∈ [𝑎, 𝑏]
which implies,
|𝑓(𝑥)| − |𝑓(𝑎)| ≤ 𝑀 ∀𝑥 ∈ [𝑎, 𝑏]
Hence,
| 𝑓(𝑥)| ≤ |𝑓(𝑎)| + 𝑀 .
(10)
So, 𝑓(𝑥) is bounded.
Example 2:
Show that:
𝑓(𝑥) = {
𝑥 cos
𝜋
2𝑥
2𝑛 2𝑛−1
1
3 2
𝑘 𝑡ℎ subinterval is [
, ]. If 𝑘 is even then 𝑘 + 1 is odd,
𝑘+1 𝑘
1
1
𝜋𝑘 1
𝑓 ( ) = 𝑐𝑜𝑠
= (−1)𝑘/2
𝑘
𝑘
2
𝑘
1
1
𝜋(𝑘 + 1)
𝑓(
)=
𝑐𝑜𝑠
=0
𝑘+1
𝑘+1
2
so,
1
|∆𝑓𝑘 | = .
𝑘
Similarly, if 𝑘 is odd and 𝑘 + 1 is even,
1
|∆𝑓𝑘 | =
𝑘+1
∑2𝑛
𝑘=1 | ∆𝑓𝑘 | = |∆𝑓1 | + |∆𝑓2 | + ⋯ + |∆𝑓2𝑛−1 | + |∆𝑓2𝑛 |
1
2𝑛
+
= 1+
= ∑𝑛𝑘=1
1
2𝑛
1
2
1
𝑘
+
1
1
2𝑛−2
+ + ⋯+
3
+
1
+⋯+
2𝑛−2
1
1
𝑛−1
+
1
4
+
1
4
+
1
2
+
1
2
𝑛
1
but, ∑𝑛𝑘=1 is divergent as 𝑛 → ∞ .
𝑘
Hence, 𝑓 is not of bounded variation on [𝑎, 𝑏].
Note that:
If we take the same example on any closed interval does
not contain 0 , say [1, 2], 𝑓 is continuous, 𝑓` exist and
bounded, then 𝑓 is of boundedvariation by Theorem 2.
Remark:
A function of bounded variation is not necessarily
continuous. For example: Let 𝑓(𝑥) = [𝑥] be the greatest
integer function less or equal than 𝑥 . Then 𝑓 is of
bounded variation on [0, 2] . That is because 𝑓 is
increasing, but it is discontinuous.
0<𝑥≤1
0
𝑥=0
is not of bounded variation on [0, 1] , although 𝑓 is
bounded and continuous.
3
so,
∑𝑛𝑘=1|∆ℎ𝑘 | ≤ ∑𝑛𝑘=1|∆𝑓𝑘 | + ∑𝑛𝑘=1 |∆𝑔𝑘 | ≤ 𝑀 + 𝑁
Hence, ℎ is of bounded variation.
Now,
sup{∑𝑛𝑘=1|∆ℎ𝑘 | : 𝑃 ∈ 𝒫([𝑎, 𝑏])} ≤
𝑛
sup{∑𝑘=1|∆𝑓𝑘 |: 𝑃 ∈ 𝒫([𝑎, 𝑏])} + sup{∑𝑛𝑘=1|∆𝑔𝑘 | : 𝑃 ∈
𝒫([𝑎, 𝑏])}
hence,
𝑉𝑓+𝑔 ≤ 𝑉𝑓 + 𝑉𝑔 .
In similar manner we can prove the case 𝑓 − 𝑔.
Example 3:
𝑥 2 𝑠𝑖𝑛
1
𝑥≠0
𝑥
𝑓={
.
0
𝑥=0
Determine whether or not 𝑓 is of bounded variation on
[0, 1]
Solution:
1
1
𝑓 is continuous on [0, 1] , 𝑓`(𝑥) = 2𝑥𝑠𝑖𝑛 − 𝑐𝑜𝑠 on
𝑥
𝑥
(0, 1) .Therefore |𝑓`(𝑥)| ≤ 3 ∀𝑥 ∈ (0, 1).
𝑓` exists and bounded on (0,1) , so 𝑓 is of bounded
variation on [0, 1] by Theorem 2.
3.
ii.
Total Variation:
Definition 2: Let 𝑓 be of bounded variation on [𝑎, 𝑏], and
let ∑(𝑃) denote the sum ∑𝑛𝑘=1 | ∆𝑓𝑘 | corresponding to the
𝑃 = {𝑥0 , 𝑥1 , … , 𝑥𝑛 } of [𝑎, 𝑏] . The number 𝑉𝑓 defined as
follows:
𝑉𝑓 = 𝑉𝑓 (𝑎, 𝑏) = 𝑠𝑢𝑝 {∑ (𝑃): 𝑃 ∈ 𝒫([𝑎, 𝑏])}(11)
is called the total variation of 𝑓 on [𝑎, 𝑏].
Note:
A function 𝑓 : [𝑎, 𝑏] → ℝ is constant if and only if 𝑓 is of
bounded variation and 𝑉𝑓 (𝑎, 𝑏) = 0.
Example 4:
Let 𝑓(𝑥) = 2𝑥 + 1 be a function defined on [1, 3] , and
let 𝑃 = {𝑥0 , 𝑥1 , … , 𝑥𝑛 } be a partition of [1, 3], then
∑𝑛𝑘=1|∆𝑓𝑘 | = 𝑓(3) − 𝑓(1) = 4
so,
𝑉𝑓 (𝑎, 𝑏) = 𝑠𝑢𝑝 {∑(𝑃) : 𝑃 ∈ 𝒫([𝑎, 𝑏])} = 4 .
Theorem 5: Let 𝑓 be function of bounded variation on
[𝑎, 𝑏] and assume that 𝑓 is bounded away from 0, that is
suppose ∃ a positive number 𝑚 such that,
1
0 < 𝑚 ≤ |𝑓(𝑥)| ∀𝑥 ∈ [𝑎, 𝑏] .Then 𝑔 =
is also of
Theorem 4: Let 𝑓 and 𝑔 be two functions of bounded
variation on [𝑎, 𝑏]. Then their sum, difference, and product
are functions of bounded variation on [𝑎, 𝑏], and we have,
i.
𝑉𝑓±𝑔 ≤ 𝑉𝑓 + 𝑉𝑔 .
(12)
ii.
𝑉𝑓.𝑔 ≤ 𝐵𝑉𝑓 + 𝐴𝑉𝑔 .
(13)
where
𝐴 = 𝑠𝑢𝑝{|𝑓(𝑥)|: 𝑥 ∈ [𝑎, 𝑏]} ,
𝐵 = 𝑠𝑢𝑝{|𝑔(𝑥)|: 𝑥 ∈ [𝑎, 𝑏]}.
i.
Let ℎ(𝑥) = 𝑓(𝑥)𝑔(𝑥) , and let 𝑃 be any partition
of [𝑎, 𝑏], then
|∆ℎ𝑘 | = |𝑓(𝑥𝑘 )𝑔(𝑥𝑘 ) − 𝑓(𝑥𝑘−1 )𝑔(𝑥𝑘−1 )|
= |𝑓(𝑥𝑘 )𝑔(𝑥𝑘 ) − 𝑓(𝑥𝑘−1 )𝑔(𝑥𝑘−1 ) + 𝑓(𝑥𝑘−1 )𝑔(𝑥𝑘 )
− 𝑓(𝑥𝑘−1 )𝑔(𝑥𝑘 )|
= |𝑔(𝑥𝑘 )(𝑓(𝑥𝑘 ) − 𝑓(𝑥𝑘−1 )) + 𝑓(𝑥𝑘−1 )(𝑔(𝑥𝑘 ))
− 𝑔(𝑥𝑘−1 ))|
≤ |𝑔(𝑥𝑘 )||∆𝑓𝑘 | + |𝑓(𝑥𝑘−1 )| |∆𝑔𝑘 |
≤ 𝐵|∆𝑓𝑘 | + 𝐴|∆𝑔𝑘 |
so,
∑𝑛𝑘=1|∆ℎ𝑘 | ≤ 𝐵 ∑𝑛𝑘=1|∆𝑓𝑘 | + 𝐴 ∑𝑛𝑘=1 |∆𝑔𝑘 |
since𝑓and 𝑔 are each of bounded variation we have,
∑𝑛𝑘=1|∆ℎ𝑘 | ≤ 𝐵𝑀 + 𝐴𝑁
we conclude that, ℎ is of bounded variation on [𝑎, 𝑏].
Now,
𝑠𝑢𝑝{∑𝑛𝑘=1|∆ℎ𝑘 |: 𝑃 ∈ 𝒫([𝑎, 𝑏])} ≤
𝑛
𝐵 sup{∑𝑘=1|∆𝑓𝑘 |: 𝑃𝒫([𝑎, 𝑏])} + 𝐴 sup{∑𝑛𝑘=1|∆𝑔𝑘 | : 𝑃 ∈
𝒫([𝑎, 𝑏])}
Hence,
𝑉𝑓.𝑔 ≤ 𝐵𝑉𝑓 + 𝐴𝑉𝑔 .
𝑓
bounded variation on [𝑎, 𝑏], and 𝑉𝑔 ≤ 𝑉𝑓 /𝑚2 .
Proof:
|∆𝑔𝑘 | = |
1
𝑓(𝑥𝑘 )
−
1
𝑓(𝑥𝑘−1 )
|=|
∆𝑓𝑘
|≤|
𝑓(𝑥𝑘 )𝑓(𝑥𝑘−1 )
∆𝑓𝑘
𝑚2
|. (14)
We conclude that, 𝑔 is of bounded variation on [𝑎, 𝑏] ,
and 𝑉𝑔 ≤ 𝑉𝑓 /𝑚2 .
Proof:
Let ℎ(𝑥) = 𝑓(𝑥) + 𝑔(𝑥), and let 𝑃 be any partition
of [𝑎, 𝑏], we have,
|∆ℎ𝑘 | = |𝑓(𝑥𝑘 ) + 𝑔(𝑥𝑘 ) − 𝑓(𝑥𝑘−1 ) − 𝑔(𝑥𝑘−1 )|
= |𝑓(𝑥𝑘 ) − 𝑓(𝑥𝑘−1 ) + 𝑔(𝑥𝑘 ) − 𝑔(𝑥𝑘−1 )|
≤ |∆𝑓𝑘 | + |∆𝑔𝑘 |
so,
∑𝑛𝑘=1|∆ℎ𝑘 | ≤ ∑𝑛𝑘=1|∆𝑓𝑘 | + ∑𝑛𝑘=1 |∆𝑔𝑘 | .
Since 𝑓 and 𝑔 are each of bounded variation,
∃𝑀, 𝑁 ∈ ℝ+ such that,
∑𝑛𝑘=1|∆𝑓𝑘 | ≤ 𝑀 and ∑𝑛𝑘=1 |∆𝑔𝑘 | ≤ 𝑁
Corollary:
Let 𝑓 and 𝑔 be functions of bounded variation on [𝑎, 𝑏]
and let 𝑐 be a constant, then
𝑐𝑓 is of bounded variation on [𝑎, 𝑏].
1
𝑓
If
is of bounded variation on [𝑎, 𝑏], then is
𝑔
of bounded variation on [𝑎, 𝑏].
4
𝑔
Theorem 6: Let 𝑓 be function of bounded variation on
[𝑎, 𝑏] and assume that 𝑐 ∈ (𝑎, 𝑏). Then 𝑓 is of bounded
variation on [𝑎, 𝑐] and on [𝑐, 𝑏], and
𝑉𝑓 (𝑎, 𝑏) = 𝑉𝑓 (𝑎, 𝑐) + 𝑉𝑓 (𝑐, 𝑏).
(15)
Proof:
i.
If 𝑥1 , 𝑥2 are two points in [𝑎, 𝑏] such that 𝑥1 <
𝑥2 , then
0 ≤ |𝑓(𝑥2 ) − 𝑓(𝑥1 )| ≤ 𝑉𝑓 (𝑥1 , 𝑥2 )
= 𝑉𝑓 (𝑎, 𝑥2 ) − 𝑉𝑓 (𝑎, 𝑥1 )
= 𝑉(𝑥2 ) − 𝑉(𝑥1 )
Therefore 𝑉(𝑥1 ) ≤ 𝑉(𝑥2 ).
Hence, 𝑉 is an increasing on [𝑎, 𝑏].
ii.
Let 𝐻(𝑥) = 𝑉(𝑥) − 𝑓(𝑥), if 𝑥 ∈ [𝑎, 𝑏].
If 𝑎 ≤ 𝑥1 < 𝑥2 ≤ 𝑏 we have,
𝐻(𝑥2 ) − 𝐻(𝑥1 ) = 𝑉(𝑥2 ) − 𝑉(𝑥1 ) − (𝑓(𝑥2 ) − 𝑓(𝑥1 ))
= 𝑉𝑓 (𝑥1 , 𝑥2 ) − (𝑓(𝑥2 ) − 𝑓(𝑥1 ))
but from the definition of 𝑉𝑓 (𝑥1 , 𝑥2 ) we have,
𝑓(𝑥2 ) − 𝑓(𝑥1 ) ≤ 𝑉𝑓 (𝑥1 , 𝑥2 )
this means that,
𝐻(𝑥2 ) − 𝐻(𝑥1 ) ≥ 0
Hence, 𝑉 − 𝑓 is an increasing on [𝑎, 𝑏].
Proof:
Let 𝑃1 be a partition of [𝑎, 𝑐], and let 𝑃2 be a partition
of [𝑐, 𝑏] then, 𝑃0 = 𝑃1 ∪ 𝑃2 is a partition of [𝑎, 𝑏].
If ∑ 𝑃 denotes the sum ∑ |∆𝑓𝑘 | corresponding to any
partition 𝑃. We can write,
∑ 𝑃1 + ∑ 𝑃2 = ∑ 𝑃0 ≤ 𝑉𝑓 (𝑎, 𝑏)
(16)
so from (16) we have,
∑ 𝑃1 ≤ 𝑉𝑓 (𝑎, 𝑏)
i.e.
∑ |∆𝑓𝑘 | ≤ 𝑉𝑓 (𝑎, 𝑏)
which means that 𝑓 is of bounded variation on [𝑎, 𝑐].
and
∑ 𝑃1 ≤ 𝑉𝑓 (𝑎, 𝑏)
i.e.
∑ |∆𝑓𝑘 | ≤ 𝑉𝑓 (𝑎, 𝑏)
which means 𝑓 is of bounded variation on [𝑐, 𝑏].
From (16) we can also obtain the inequality,
𝑉𝑓 (𝑎, 𝑐) + 𝑉𝑓 (𝑐, 𝑏) ≤ 𝑉𝑓 (𝑎, 𝑏)
(17)
To obtain the reverse inequality, let
𝑃 = {𝑥0 , 𝑥1 , … , 𝑥𝑛 } ∈ 𝒫[(𝑎, 𝑏)] and let 𝑃0 = 𝑃 ∪ {𝑐} be
the partition obtained by adjoining the point 𝑐 .
If 𝑐 ∈ [𝑥𝑘−1 , 𝑥𝑘 ] then we have,
|𝑓(𝑥𝑘 ) − 𝑓(𝑥𝑘−1 )| ≤ |𝑓(𝑥𝑘 ) − 𝑓(𝑐)| + |𝑓(𝑐) − 𝑓(𝑥𝑘−1 )|
and hence,
∑ 𝑃 ≤ ∑ 𝑃0
The corresponding sums for all these partitions are
connected by the relation
∑ 𝑃 ≤ ∑ 𝑃0 = ∑ 𝑃1 + ∑ 𝑃2 ≤ 𝑉𝑓 (𝑎, 𝑐) + 𝑉𝑓 (𝑐, 𝑏)
Therefore, 𝑉𝑓 (𝑎, 𝑐) + 𝑉𝑓 (𝑐, 𝑏) is an upper bound for every
sum ∑ 𝑃, since this cannot be smaller than the least upper
bound, we must have,
𝑉𝑓 (𝑎, 𝑏) ≤ 𝑉𝑓 (𝑎, 𝑐) + 𝑉𝑓 (𝑐, 𝑏)
(18)
From (17) + (18) we complete the prove.
Example 5:
Let 𝑓(𝑥) = cos 𝑥 be a function defined on [0, 𝜋]. Then we
have the following:
𝑉𝑓 (0, 𝑥) = 𝑓(0) − 𝑓(𝑥) = 1 − cos 𝑥is increasing
on [0, 𝜋].
𝑉 − 𝑓 = 1 − 2𝑐𝑜𝑠 𝑥 is also increasing on [0, 𝜋].
Figure 4. The graph of 𝑉𝑓 (0, 𝑥) = 1 − cos 𝑥.
Corollary:
If 𝑓 is of bounded variation on [𝑎, 𝑏] , then 𝑓 is of
bounded variation also on any subinterval of [𝑎, 𝑏].
4.
Total Variation as a Function of 𝒙:
Figure 5.The graph of 𝑉 − 𝑓 = 1 − 2𝑐𝑜𝑠 𝑥 .
Theorem 7: Let 𝑓 be of bounded variation on [𝑎, 𝑏] .
Let 𝑉(𝑥) be defined on [𝑎, 𝑏] as follows:
𝑉 = 𝑉(𝑥) = 𝑉𝑓 (𝑎, 𝑥) 𝑖𝑓 𝑎 < 𝑥 ≤ 𝑏, 𝑉(𝑎) = 0. Then
i.
𝑉 is an increasing on [𝑎, 𝑏].
ii.
𝑉 − 𝑓 is an increasing on [𝑎, 𝑏].
Jordan`s Decomposition Theorem 8: A bounded
function𝑓: [𝑎, 𝑏] → ℝ is of bounded variation, if and only
if, there exist two increasing functions 𝑓1 and 𝑓2 define on
[𝑎, 𝑏] such that
𝑓 = 𝑓1 − 𝑓2 .
(19)
5
Proof:
"Only if " part:
Let us define 𝑓1 (𝑥) = 𝑉(𝑥) , so 𝑓1 (𝑥) is increasing. Let
𝑓2 (𝑥) = 𝑓1 (𝑥) − 𝑓(𝑥). Then if 𝑥 1 < 𝑥2 ,
𝑓2 (𝑥2 ) − 𝑓2 (𝑥1 ) = 𝑓1 (𝑥2 ) − 𝑓(𝑥2 ) − 𝑓1 (𝑥1 ) + 𝑓(𝑥1 )
Note that:
The functions 𝑓 and 𝛼 are referred to as the integrand
and the integrator, respectively.
Note that:
In the special case when 𝛼(𝑥) = 𝑥 , we write 𝑆(𝑃, 𝑓)
instead of 𝑆(𝑃, 𝑓, 𝛼), and 𝑓 ∈ ℛ instead of 𝑓 ∈ ℛ(𝛼).
The integral is then called a Riemann integral and is
𝑏
𝑏
denoted by ∫𝑎 𝑓 𝑑𝑥 or by ∫𝑎 𝑓(𝑥) 𝑑𝑥 .
= (𝑓1 (𝑥2 ) − 𝑓1 (𝑥1 )) − (𝑓(𝑥2 ) − 𝑓(𝑥1 ))
= 𝑉(𝑥_2 ) − 𝑉(𝑥_1 ) − (𝑓(𝑥_2 ) − 𝑓(𝑥_1 ))
= 𝑉𝑓 (𝑎, 𝑥2 ) − 𝑉𝑓 (𝑎, 𝑥1 ) − (𝑓(𝑥2 ) − 𝑓(𝑥1 ))
Remark:
𝑏
The numerical value of ∫𝑎 𝑓(𝑥) 𝑑𝛼(𝑥) depends only on
𝑓, 𝛼, 𝑎, and 𝑏, and does not depend on the symbol 𝑥.
= 𝑉𝑓 (𝑥1 , 𝑥2 ) − (𝑓(𝑥2 ) − 𝑓(𝑥1 )) 𝑃 = {𝑥1 < 𝑥2 }
≥0.
Therefore, 𝑓2 (𝑥2 ) ≥ 𝑓2 (𝑥1 ) whenever 𝑥2 ≥ 𝑥1 .Thus,
both 𝑓1 and 𝑓2 are increasing, and 𝑓 = 𝑓1 − 𝑓2 .
"If " part :
Since every bounded monotone function is of bounded
variation and the difference of two such function is also of
bounded variation, the 'if' part hold.
IV.
2. Monotonically Increasing Integrators
(Upper and Lower Riemann– Stieltjes integrals):
Definition 5: Let 𝑃 = {𝑥0 , 𝑥1 , … , 𝑥𝑛 } be a partition of
[𝑎, 𝑏]and let
𝑀𝑘 (𝑓) = 𝑠𝑢𝑝{𝑓(𝑥): 𝑥 ∈ [𝑥𝑘−1 , 𝑥𝑘 ]},
(23)
𝑚𝑘 (𝑓) = 𝑖𝑛 𝑓{𝑓(𝑥): 𝑥 ∈ [𝑥𝑘−1 , 𝑥𝑘 ]}.
(24)
Then the upper Stieltjes sum is defined as
𝑈(𝑃, 𝑓, 𝛼) = ∑𝑛𝑘=1 𝑀𝑘 (𝑓)𝛥𝛼𝑘 and the lower Stieltjes sum
is 𝐿(𝑃, 𝑓, 𝛼) = ∑𝑛𝑘=1 𝑚𝑘 (𝑓)𝛥𝛼𝑘 of 𝑓 with respect to 𝛼 for
the partition 𝑃.
THE RIEMANN – STIELTJES INTEGRAL
In mathematics, the Riemann – Stieltjes integral is a
generalization of the Riemann integral, named after
Bernhard Riemann and Thomas JoannesStieltjes. The
definition of this integral was first published in 1894 by
Stieltjes.
1.
Note that:
i. We always have 𝑚𝑘 (𝑓) ≤ 𝑀𝑘 (𝑓) for all 𝑓 on
[𝑎, 𝑏]. If α is increasing on [𝑎, 𝑏], then ∆𝛼𝑘 ≥ 0
for all 𝑘 and we can also write
𝑚𝑘 (𝑓)𝛥𝛼𝑘 ≤ 𝑀𝑘 (𝑓)𝛥𝛼𝑘
Definition of Riemann – Stieltjes Integral:
Definition 3: Let 𝑃 = {𝑥0 , 𝑥1 , … , 𝑥𝑛 } be a partition of
[𝑎, 𝑏] and let 𝑡𝑘 be a point in the subinterval [𝑥𝑘−1 , 𝑥𝑘 ].A
sum of the form
𝑆(𝑃, 𝑓, 𝛼) = ∑𝑛𝑘=1 𝑓(𝑡𝑘 )𝛥𝛼𝑘
(20)
is called a Riemann- Stieltjes sum of 𝑓 with respect to 𝛼.
The symbol 𝛥𝛼𝑘 denotes the difference
𝛥𝛼𝑘 = 𝛼(𝑥𝑘 ) – 𝛼(𝑥𝑘−1 ), so that
∑nk=1 𝛥𝛼𝑘 = 𝛼(𝑏) − 𝛼(𝑎).
(21)
∑𝑛𝑘=1 𝑚𝑘 (𝑓)𝛥𝛼𝑘 ≤ ∑𝑛𝑘=1 𝑀𝑘 (𝑓)𝛥𝛼𝑘
that is, for all partition 𝑃 of [𝑎, 𝑏], then
𝐿(𝑃, 𝑓, 𝛼) ≤ U(P, 𝑓, 𝛼)
ii. If 𝑡𝑘 ∈[𝑥 k-1 , 𝑥 k], then
𝑚𝑘 (𝑓) ≤ 𝑓(𝑡𝑘 ) ≤ 𝑀𝑘 (𝑓)
when 𝛼 is increasing on [𝑎, 𝑏], we have
∆𝛼𝑘 ≥ 0, and
𝑚𝑘 (𝑓)𝛥𝛼𝑘 ≤ 𝑓(𝑡𝑘 )𝛥𝛼𝑘 ≤ 𝑀𝑘 (𝑓)𝛥𝛼𝑘
Definition 4: The generalized Riemann–Stieltjes integral
of 𝑓 with respect to 𝛼 is a number 𝐴 such that for every
𝜀 > 0 , there exists a partition 𝑃𝜀 such that for every
partition 𝑃finer than 𝑃𝜀 ,
|𝑆(𝑃, 𝑓, 𝛼) − 𝐴| < ε
(22)
for every choice of points 𝑡𝑘 in [𝑥𝑘−1 , 𝑥𝑘 ].
When such a number 𝐴 exists, it is uniquely determined
and is denoted by
𝑏
𝑏
∫𝑎 𝑓 𝑑𝛼 or by ∫𝑎 𝑓(𝑥) 𝑑𝛼(𝑥)
(25)
∑𝑛𝑘=1 𝑚𝑘 (𝑓)𝛥𝛼𝑘 ≤ ∑𝑛𝑘=1 𝑓(𝑡𝑘 )𝛥𝛼𝑘 ≤ ∑𝑛𝑘=1 𝑀𝑘 (𝑓)𝛥𝛼𝑘
𝐿(𝑃, 𝑓, 𝛼) ≤ 𝑆(𝑃, 𝑓, 𝛼) ≤ 𝑈(𝑃, 𝑓, 𝛼) .
(26)
These inequalities relate the upper and lower sums to
Riemann -Stieltjes sums, and do not necessarily hold
when 𝛼 is not an increasing function.
𝑏
The next theorem shows that, for increasing 𝛼 , the
refinement of the partition increases the lower sums and
decreases the upper sums.
we also say that the Riemann-Stieltjes integral ∫𝑎 𝑓 𝑑𝛼
exists, and we write "𝑓 ∈ ℛ(𝛼)".
6
Theorem 9: Assume that 𝛼 is increasing on [𝑎, 𝑏]:
i. If 𝑃` is refinement than 𝑃, we have
𝑈(𝑃` , 𝑓, 𝛼) ≤ 𝑈(𝑃, 𝑓, 𝛼)
(27)
and
𝐿(𝑃` , 𝑓, 𝛼) ≥ 𝐿(𝑃, 𝑓, 𝛼)
(28)
ii. For any two partition 𝑃 1 and 𝑃 2, we have
𝐿(𝑃1 , 𝑓, 𝛼) ≤ U(𝑃2 , 𝑓, 𝛼)
(29)
Theorem 11: If 𝑓 ∈ ℛ (𝛼 ) and if 𝑓 ∈ ℛ (𝛽 ) on[𝑎, 𝑏],
then 𝑓 ∈ ℛ(𝑐1 α + 𝑐2 𝛽) on [𝑎, 𝑏] (for any two constant
𝑐1 and 𝑐2 ) and we have
𝑏
𝑏
𝑏
(33)
∫𝑎 𝑓𝑑(𝑐1 α + 𝑐2 𝛽) = 𝑐1 ∫𝑎 𝑓𝑑𝛼 + 𝑐2 ∫𝑎 𝑓𝑑𝛽
𝑐
Theorem 12: Assume that 𝑐 ∈ (𝑎, 𝑏). If ∫𝑎 𝑓𝑑𝛼 and
𝑏
𝑏
∫𝑐 𝑓𝑑𝛼 exist, then ∫𝑎 𝑓𝑑𝛼 also exist and we have
𝑐
𝑏
𝑏
∫𝑎 𝑓𝑑𝛼 + ∫𝑐 𝑓𝑑𝛼 = ∫𝑎 𝑓𝑑𝛼
Definition 6: Assume that 𝛼 is an increasing on[𝑎, 𝑏]. The
upper Stieltjes integral of 𝑓 with respect to 𝛼 is defined
as follows:
𝑏
∫𝑎 𝑓𝑑𝛼 = 𝑖𝑛𝑓{ 𝑈(𝑃, 𝑓, 𝛼): 𝑃 ∈ 𝒫([𝑎, 𝑏])}.(30)
The lower Stieltjes integral is similarly defined :
𝑏
∫𝑎 𝑓𝑑𝛼 = 𝑠𝑢𝑝{𝐿(𝑃, 𝑓, 𝛼): 𝑃 ∈ 𝒫([𝑎, 𝑏])}.(31)
Where 𝒫([𝑎, 𝑏]) is the set of all possible partition
of [𝑎, 𝑏].
(34)
Definition 8: If 𝑎 < 𝑏, we define
𝑏
𝑎
𝑏
∫𝑎 𝑓𝑑𝛼 = − ∫𝑏 𝑓𝑑𝛼 whenever ∫𝑎 𝑓𝑑𝛼 exists. We also
𝑎
define ∫𝑎 𝑓𝑑𝛼 = 0.
The equation in(Theorem 12) can now be written as
follows:
𝑏
𝑐
𝑎
(35)
∫𝑎 𝑓𝑑𝛼 + ∫𝑏 𝑓𝑑𝛼 + ∫𝑐 𝑓𝑑𝛼 = 0
Note that:
We sometimes write 𝐼 (̅ 𝑓,𝛼) and𝐼(𝑓,𝛼) for the upper and
lower integrals. In the special case where 𝛼(𝑥) = 𝑥, the
upper and lower sums are denoted by𝑈(𝑃, 𝑓) and 𝐿(𝑃, 𝑓)
and are called upper and lower Riemann sums.
4.
Function of Bounded Variation and Riemann –
Stieltjes Integral:
Definition 7: A bounded real–valued function 𝑓 is
Riemann–Stieltjes integral with respect to 𝛼 on [𝑎, 𝑏] if
𝐼 (̅ 𝑓,𝛼) = 𝐼(𝑓,𝛼).
Bounded variation is important to the existence of
Riemann– Stieltjes integral. Jordan's Decomposition
Theorem plays an important rule in developing the relation
between function of bounded variation and Riemann –
Stieltjes integral.
Example 6:
Let 𝛼(𝑥) = 𝑥and define 𝑓 on [0, 1] as follows :
1 ,𝑥 ∈ ℚ
𝑓(𝑥) = {
0 ,𝑥 ∉ ℚ
show that 𝑓 is not Riemann–Stieltjes integral with respect
to 𝛼, where ℚ is the set of all rational numbers.
Theorem 13: Suppose that 𝑓 is continuous on[𝑎, 𝑏], and
that 𝛼 is of bounded variation on [𝑎, 𝑏] . Then the
𝑏
Riemann–Stieltjes integral ∫𝑎 𝑓𝑑𝛼 exists.
Proof:
Assume that 𝑓 is an increasing function. Because 𝛼 is of
bounded variation, we can write 𝛼 as difference of two
increasing
functions.
i.e 𝛼 = 𝛼1 − 𝛼2
(Jordan's
Decomposition Theorem), we can write
𝑏
𝑏
𝑏
∫𝑎 𝑓𝑑𝛼 = ∫𝑎 𝑓𝑑𝛼1 − ∫𝑎 𝑓𝑑𝛼2 .
Let 𝑃 be a partition of [𝑎, 𝑏]. Then
𝑏
𝑠𝑢𝑝{𝐿(𝑃, 𝑓, 𝛼)} ≤ ∫𝑎 𝑓𝑑𝛼 ≤ 𝑖𝑛𝑓{ 𝑈(𝑃, 𝑓, 𝛼)}
it is enough to show
𝑠𝑢𝑝{𝐿(𝑃, 𝑓, 𝛼)} = 𝑖𝑛𝑓{ 𝑈(𝑃, 𝑓, 𝛼)},
to prove the Riemann–Stieltjes integral exists.
Now, if 𝛼 is constant on [𝑎, 𝑏] then 𝛥𝛼 = 0 , thus
𝑏
∫𝑎 𝑓𝑑𝛼 = 0 as do the upper and lower sums.
If 𝛼 is not constant, given 𝜀 > 0, since 𝑓 is continuous
on [𝑎, 𝑏] , we conclude that 𝑓 is uniform
continuous.Which implies there ∃𝛿 > 0 such that if
|𝑥𝑘 – 𝑥𝑘−1 | < 𝛿, then
𝜀
𝑀𝑘 − 𝑚𝑘 <
𝛼(𝑏) − 𝛼(𝑎)
Solution :
For every partition 𝑃of [0,1], we have 𝑀𝑘 (𝑓) = 1 and
𝑚𝑘 (𝑓) = 0, since every subinterval contains both rational
and irrational numbers. Therefore, 𝑈(𝑃, 𝑓) = 1 and
𝐿(𝑃, 𝑓) = 0 for all 𝑃. It follows that we have, for [0,1],
1
1
∫0 𝑓𝑑𝛼 = 1 and ∫0 𝑓𝑑𝛼 = 0
Therefore,
I(̅ 𝑓, 𝛼) = 1 ≠ I(𝑓,𝛼) = 0.
then 𝑓 is not Riemann–Stieltjes integral.
3.
Linear Properties:
Theorem 10: The linear combination of Riemann–Stieltjes
integral functions is Riemann–Stieltjes integral, and for
any 𝑓 ∈ ℛ(𝛼) and if 𝑔 ∈ ℛ(𝛼) on [𝑎, 𝑏], we have
𝑏
𝑏
𝑏
∫𝑎 (𝑐1 𝑓 + 𝑐2 𝑔)𝑑𝛼 = 𝑐1 ∫𝑎 𝑓𝑑𝛼 + 𝑐2 ∫𝑎 𝑔𝑑𝛼
where𝑐1 and 𝑐2 ∈ ℝ.
(32)
7
𝑀𝑘 = 𝑠𝑢𝑝 { 𝑓(𝑥): 𝑥 ∈ [𝑥𝑘−1 , 𝑥𝑘 ]},
𝑚𝑘 = 𝑖𝑛𝑓{𝑓(𝑥): 𝑥 ∈ [𝑥𝑘−1 , 𝑥𝑘 ]}.
Therefore, if |𝑥𝑘 – 𝑥𝑘−1 | < 𝛿
Definition 13 : Let 𝑋 be a random variable with range
𝑅𝑋 . The expectation (or expected value) of 𝑋 , denoted
by 𝐸(𝑋) is defined by
where
𝐸(𝑋) = ∫𝑅 𝑥𝑑𝐹(𝑥)
0 ≤ 𝑖𝑛𝑓{ 𝑈(𝑃, 𝑓, 𝛼)} − 𝑠𝑢 𝑝{𝐿(𝑃, 𝑓, 𝛼)} < 𝑈(𝑃, 𝑓, 𝛼) − 𝐿(𝑃, 𝑓, 𝛼)
Where 𝑋 is continuous random variable.
= ∑𝑛𝑘=1 𝑀𝑘 (𝛼(𝑥𝑘 )– 𝛼(𝑥𝑘−1 )) − ∑𝑛𝑘=1 𝑚𝑘 (𝛼(𝑥𝑘 )– 𝛼(𝑥𝑘−1 ))
Now since 𝐹(𝑥) bounded and increasing function then
𝐸(𝑋) is Riemann- Stieltjes Integral. So we define 𝐸(𝑋)
using Riemann–Stieltjes integral definition.
= ∑𝑛𝑘=1(𝑀𝑘 − 𝑚𝑘 )(𝛼(𝑥𝑘 )– 𝛼(𝑥𝑘−1 ))
< ∑𝑛𝑘=1
<
𝜀
𝛼(𝑏)−𝛼(𝑎)
𝜀
𝛼(𝑏)−𝛼(𝑎)
(𝛼(𝑥𝑘 )– 𝛼(𝑥𝑘−1 ))
Example7:
𝑥−𝑎
Let X be uniform distribution on [𝑎, 𝑏], 𝐹(𝑥) =
, then
(𝛼(𝑏))– 𝛼(𝑏))
RiemannTheory:
Stieltjes
Integral
in
𝑏−𝑎
𝑏
<𝜀
Hence,
0 ≤ 𝑖𝑛𝑓{ 𝑈(𝑃, 𝑓, 𝛼)} − 𝑠𝑢 𝑝{𝐿(𝑃, 𝑓, 𝛼)} < 𝜀.
Thus,
𝑠𝑢𝑝{𝐿(𝑃, 𝑓, 𝛼)} = 𝑖𝑛𝑓{ 𝑈(𝑃, 𝑓, 𝛼)}
so the Riemann–Stieltjes integral of 𝑓 with respect to 𝛼
exists.
If 𝑓 is decreasing function prove in a similar way.
5.
(37)
𝑋
𝐸(𝑋) = ∫𝑎 𝑥𝑑𝐹(𝑥)
𝑏
= ∫𝑎 𝑥𝑑 (
=
=
1
𝑏−𝑎
𝑎+𝑏
2
𝑥−𝑎
𝑏−𝑎
𝑏
)
𝑏
(∫𝑎 𝑥𝑑𝑥 − ∫𝑎 𝑥𝑑𝑎 )
.
(38)
Probability
REFERENCES
[1]
In probability theory many concepts are defined using
Riemann–Stieltjes integral such that expected value. Here
we will define the expected value for a random variable 𝑋
.
Definition 9:The sample space is the collection of all
possible outcomes that might be observed for random
experiment. This set is usually denoted by 𝛺.
[2]
[3]
[4]
[5]
[6]
Definition 10 : A random variable 𝑋 is a real valued
function on a sample space 𝛺 , that assigns to each
element𝑤 ∈ 𝛺𝑎real number 𝑋(𝑤) = 𝑥 .
Definition 11: The range (or space ) of 𝑋, say 𝑅𝑋 is the
set of all possible values of 𝑋.
Definition 12 : Let 𝑋 be a random variable with range
𝑅𝑋 . The cumulative distribution function of the random
variable , is defined for all real numbers
𝑥 ∈ (−∞, ∞), by
𝐹(𝑥) = 𝑃(𝑋 ≤ 𝑥)
(36)
where 𝑃 is a probability function .
Theorem 14:
Let 𝑋 be a random variable with
cumulative distribution function 𝐹(𝑥), and range 𝑅𝑋 ,then
i.
0 ≤ 𝐹(𝑥) ≤ 1.
ii.
𝐼𝑓 𝑎 < 𝑏, then 𝐹(𝑎) ≤ 𝐹(𝑏).
8
Apostol, T.M., Mathematical Analysis, 2nd edition, AddisonWesley, 1974.
Bartle, R. and Sherbert, D., Introduction to Real Analysis, 3rd
edition,Wiley, 2000.
Chatterjee, Dipak, Real analysis, Prentice-Hall of India, New
Delhi, India, 2005.
Eideh, A.H., Fundamentals of Probability Theory, VDM -Verlag,
Germany, 2009.
Kolmogorov, A. N. and Fomine,S. V., Introductory RealAnalysis,
1st edition, Dover Publications, New York, 1975.
Royden, H. L., Real Analysis, 3rd edition, Collire MacMillan, 1988.