Ant Colony Optimization for the Graph Coloring Problem
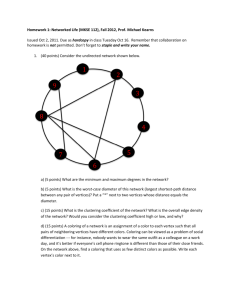
advertisement

Ant Colony Optimization for the Graph Coloring Problem
Alexandru-Andrei Jancă, Mihail-Cosmin Piţ-Rada
University POLITEHNICA of Bucharest
Faculty of Automatic Control and Computers, Computer Science Department
alexandru.janca@cti.pub.ro, cosmin.pit@gmail.com
Abstract
ACO is a well known meta heuristic in which a colony of artificial ants cooperates for solving a
combinatorial optimization problem. This approach is suitable for the graph coloring problem and
provides good practical results. The starting point of this paper is an algorithm that brought
mentionable improvements in comparison with the algorithm that first suggested this sort of
approach on the graph coloring problem. The statistical view imposed by ACO allowed us to
tamper with various parameters and attempt various heuristics. This argument is backed up by the
nature of the problem itself, since no trivial solution is known for graph coloring. Based on our
analysis of the current model for apriori information, we have introduced a new measure of such
information, removed an existing one and altered the persistence of the way each ant chooses its
next move.
Keywords: graph coloring, ant colony optimization, heuristics
1.
Introduction
The graph coloring problem is an important problem and has wide applications in
contemporary problems with exponential complexity. The graph coloring problem has
many possible applications including the time-tabling problem, the register allocation
problem, the digital circuit testing problem, the map coloring problem etc. Being a NPcomplete problem many combinatorial problems can be formulated in terms of a graph
coloring. For example the well known game Sudoku ([7]) can be reduced pretty easily to
a graph with 81 vertices that needs to be colored with 9 colors.
A proper coloring of a graph G = (V, E) is a function f: V → C where C is a set of colors,
that assigns a color to every vertex from, G such that any two adjacent nodes have different
colors. The graph coloring problem refers to a minimal proper coloring. In this case the
number of used colors is called the chromatic number of the graph. ([3], [4])
Figure 1. Example of a minimal proper coloring
ACO is a heuristic technique that imitates the behavior of a colony of ants and their
ability to collectively solve problems. For example, it has been observed that a colony of ants
is able to find the shortest path to a food source by marking their trails with a chemical
substance called pheromone. The ants are looking for pheromone trails and prefer to follow
the trails with higher levels of pheromone. Some pheromone evaporates over the time and this
makes the ants to take in consideration only the paths intensively used. ([2], [6])
2.
Previous Work
The graph coloring problem is a difficult problem and being very hard to find an optimal
solution makes it the subject of many research papers. Several approaches were suggested
such as genetic algorithms, heuristic algorithms (Welsh-Powell, Chaitin), meta heuristics
(Tabu Search, ACO), mixed algorithms etc. From those approaches ACO solves the graphs
coloring problem near optimally.
In [3] the authors propose a multi-agent solution based on the idea of parallel search. The
ants move around the nodes and change the colors according to a local criterion. In each
iteration every ant moves from the current position to an adjacent node with the maxim
number of violations. To escape from the local minimum trap the moves and the color
assignment have associated some probabilities giving the algorithm a random behavior. The
idea is very simple and easy to implement and in many cases performs better than other
complex algorithms but still there is place for further improvements.
[4] also proposes an interesting algorithm based on DSATUR heuristic that makes some
computations based on the number of different colors assigned to the neighbors. The authors
threat the problem as a K-Coloring problem, placing k ants of different colors in every vertex.
At every step the colors are updated trying to solve at least one randomly chosen conflict. The
task is to have in the end in every vertex only ants of the same color. The behavior seems to
be somehow dependent of the density of the graph and probably isn’t too easy to compare the
performances with other more general algorithms.
Bui et. al. describe an hybrid ACO algorithm [5] in which the ants don’t have the
pheromone laying capability. The algorithm starts from a proper k-coloring, where k is an
upper bound, obtained with the XRLF algorithm. Then a colony of ants is randomly
distributed over the vertices of the graph and a series of cycles of local colorings begin. At the
end of each cycle if a proper coloring is obtained then the number of colors is decreased
otherwise this number is increased arguing that there is no proper coloring with the current set
of colors. This algorithm borrowed the tabu list idea from the TABU search meta heuristic
preventing ants from getting stuck into a loop of conflict reduction. The algorithm was tested
on a series of 119 DIMACS graphs and it seems to have a good behavior.
3.
Foundation of our approach
Ant colony optimization was first linked with another NP-complete problem, the travel
salesman problem by Dorigo and Giambardella [6]. Costa and Hertz were the first to suggest
an ACO-based approach on the graph coloring problem [2]. In order to briefly present their
solution, followed by a more detailed presentation of an improved method described by
Dowsland and Thompson [1], we review the core of ACO method – the probability
distribution by which each ant makes the decision of moving from its current state to another
one.
Adapting the generic definition to the problem at hand, the option of coloring the vertex i
using the color k is selected with the following probability:
𝛽
𝛼
𝜏𝑖𝑘
𝜂𝑖𝑘
𝑃𝑖𝑘 = {∑𝑗∈𝑊 𝜏 𝛼 𝜂 𝛽
𝑗𝑘 𝑗𝑘
, 𝑖𝑓 𝑖 ∈ 𝑊
(1)
0 , 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
W is defined as the set of uncolored vertices that can be colored using the current color k.
The set of uncolored vertices that cannot be colored using the current color k is also taken into
consideration. Let B denote this last set. Costa and Hertz provide three options for
representing the apriori knowledge an ant has regarding its choices. This apriori information
is encapsulated in 𝜂𝑖𝑘 , as stated below:
𝜂𝑖𝑘 = |𝑊| − 𝑑𝑒𝑔𝑊 (𝑖)
𝜂𝑖𝑘 = 𝑑𝑒𝑔𝐵 (𝑖)
𝜂𝑖𝑘 = 𝑑𝑒𝑔𝐵∪𝑊 (𝑖)
(2)
The pheromone trail also provides its contribution in the choice of coloring a vertex. The
important trails are those associated with the vertices that have already been colored using the
current color k. 𝜏𝑖𝑘 =
∑𝑗∈𝑉 𝑡𝑖𝑗
𝑘
|𝑉𝑘 |
, where 𝑉𝑘 is the set of vertices colored using the k color.
Finally, parameters α and β are used to represent the influence of the trail-based information
and the heuristic function respectively when the ant chooses the next vertex to color.
The algorithm ANTCOL, as named by Costa and Hertz, is the starting point for Dowsland
and Thompson's experiments, as well as for our own improvements. It is therefore mandatory
to have a glance at the main procedure:
init 𝜏𝑖𝑗 (trail matrix)
cycles=0
while cycles < ncycles and converge_limit_notreached
init i (trail update matrix)
for ant=1, nants
X = V (initialize the set of uncolored vertices)
k = 0
while 𝑋 ≠ ∅
k = k + 1
𝐶𝑘 ≠ ∅
(initialize the set of colored vertices with color k)
F = X
Select 𝑖 ∈ 𝐹 with probability 1/|F|
COLOUR_VERTEX(i, k)
While 𝐹 ≠ ∅
Select 𝑖 ∈ 𝐹 with probability 𝑃𝑖𝑘
COLOUR_VERTEX(i, k)
End_while
End_while
𝛿𝑖𝑗 = 𝛿𝑖𝑗 + 1⁄𝑘 ∀𝑖, 𝑗 ∶ 𝐶𝑖 = 𝐶𝑗 , 𝑖 ≠ 𝑗
End_for
(update trail update matrix)
𝑡𝑖𝑗 = 𝑡𝑖𝑗 + 𝛿𝑖𝑗 ∀𝑖, 𝑗 = 1, |𝑉|, 𝑖 ≠ 𝑗 (update trail matrix)
Next cycle
Procedure COLOUR_VERTEX(i, k)
X = X \ {i}
Ck = Ck ∪ {i}
F = F \ (N(i)∪{i}) (where N(i) denotes the set of i’s neighbors in F)
Dowsland and Thompson modified this algorithm starting with the assumption that the
chromatic number r (the minimum number of colors that can be used for coloring a certain
graph) is known for every given input graph [1]. The above presented procedure would stop
after r colors have been used, thus leaving some vertices uncolored in the final solution
provided by each ant. Thus, there is need for an evaluation function that would offer a
measure of comparison between solution. They proposed a simple evaluation function:
1
𝑓(𝑠) = 𝑢(𝑠)
(3)
where u(s) is the number of vertices left uncolored in the solution.
This approach cannot be applied when the chromatic number is unknown, which is of course
the practical test case. The solution is to initialize r as being the number of vertices and
updating it after each cycle as Q*-1, where Q* is the minimum number of colors found in that
cycle.
Trails must also reflect the way the evaluation function distinguishes between solutions. If
the vertex i remains uncolored in the solution s, then 𝑃𝑖𝑘 is multiplied by f(s).
A comparison between this method and the original ANTCOL algorithm was extensively
performed on time-tabling graphs rather than just random graphs. In the case of random
graphs, the tests used for comparison were generated in the same manner Costa and Hertz
originally provided their results: graphs with 100 and 300 vertices, 100 and 200 respectively
maximum cycles and variable number of ants [1, 2]. Dowsland and Thompson matched their
generated data set to their algorithm as well as the ANTCOL procedure. Their algorithm
obtained an average of 34.5 colors used for the 300 vertices graph, while ANTCOL had an
average of 35.3 colors. Similar improvements were also observed for the 500 vertices graphs
set: 53.2 average versus 54.8 obtained by ANTCOL.
These algorithms may be tackled in various ways. Our attempts have altered the behavior
of the pheromone trail, the data structures used and the probability distribution used to select
the vertice to be colored next.
4.
Our approach
A key part of ACO is the way each ant makes its next choice at each step in its way
towards the solution. In our case, which node is next to be colored using the current color
class k. This depends on the strength of the pheromone trail and a form of probabilistic
reasoning that each ant takes into consideration at each step (referred by us as apriori
information).
We have analyzed the representations used in the approach described below and interpret
them in respect to the graph coloring problem, as of course required. As the way the trail is
updated we found the current solution to be quite satisfactory, we consider rather debatable
the model proposed for the ants' apriori information, i.e. 𝜂𝑖𝑘 . It is clear that its purpose is to
provide a measure of the advantage gained by coloring vertex i using color k, since the
probability increases alongside this parameter.
Three heuristics are given and the first two seem to be consistent with the measure's
purpose. Thus, if 𝜂𝑖𝑘 = 𝑑𝑒𝑔𝐵 (𝑖) is large, we can state it is helpful to choose i as the next
colored vertex, since it has many neighbors that could not have been colored with k anyway.
This minimizes the number of the uncolored vertices affected by this coloring. The same can
be said regarding the second heuristic: a small number of uncolored vertices will not be able
to use the color k anymore, since i has a small number of neighbors in the list of current
candidates that can be colored using k. However, we found no reasonable justification for
including the third measure. So we first decided to discard the use of this measure.
Baring in mind that we need to maximize 𝑑𝑒𝑔𝐵 (𝑖) and minimize 𝑑𝑒𝑔𝑊 (𝑖), a suitable
measure that encapsulates both desires it to maximize 𝑑𝑒𝑔𝐵 (𝑖) − 𝑑𝑒𝑔𝑊 (𝑖) . Thus we bring
forward our own measure, 𝜂𝑖𝑘 = 𝑒 𝑑𝑒𝑔𝐵 (𝑖)− 𝑑𝑒𝑔𝑊 (𝑖) (we used the exp function since
𝑑𝑒𝑔𝐵 (𝑖) − 𝑑𝑒𝑔𝑊 (𝑖) could yield a negative value).
Finally, we take a look at the way the measure to be used is randomly selected. The
ANTCOL approach makes such a choice for each coloring, so every time an ant must choose
between candidates it will randomly select one of the measures available. The question arises
: should the measure be bounded at a higher level? We decide to experiment with choosing
the measure once for each color class k , as well as for each time an ant computes the entire
solution. We therefore increase the level (amount of time or number of choices in which the
same measure is used in computing choice probability distribution) of commitment of ants
to the same strategy.
To conclude, three modifications have resulted: removing the third measure, introducing
our own measure and increasing the level of commitment. Since each of them operates at a
different level, we can combined them in various manners (altering the available measures
and level of commitment) and obtain a different behavior. In our experiment we have decided
to the following alternatives: using all measures including our own, using just the first 2
proposed measures, using just our own measure and replacing the third proposed measure
with our own. For each such alternative, each possible level of commitment is used.
5.
Results
We have implemented the ANTCOL procedure, as our experiments and attempts are be
based on this core algorithm. A simple testing environment allows us to generate various
random graphs, varying the number of vertices and its load (number of edges).
The implementations and testing environment are linked by the flexible way in which we
can toggle parameters such as ant number, trail and visibility influence, convergence limits,
number of tests performed etc. Also, one can configure the availability of each of the four
measures and the level of commitment to a measure.
We have generated a set of random 100 vertices graphs. All graphs have a rather similar
load and each vertex a number of neighbors in the range 20-40. Each of the alternatives
previously described has been tested against this set by multiples runs. We have computed the
minimum number of colors obtained for each graph by each approach, the average number of
colors for each graph obtained during all runs of the same approach and the average number
of colors used on the entire data set.
Such result data being available can provide a extensive number of useful statistics and
various methods of evaluating performance and accuracy. Below we present a very relevant
excerpt of our results:
No.
𝑑𝑒𝑔𝐵 (𝑖)
𝑑𝑒𝑔𝑊 (𝑖)
𝑒 𝑑𝑒𝑔𝐵 (𝑖)− 𝑑𝑒𝑔𝑊 (𝑖)
𝑑𝑒𝑔𝐵∪𝑊 (𝑖)
Commit
level
Data set
Avg.
minimum
k
1
Yes
Yes
No
Yes
Coloring
15.883
2
Yes
Yes
No
Yes
Color
class
15.783
3
Yes
Yes
No
Yes
Solution
15.85
4
Yes
Yes
Yes
Yes
Coloring
15.2
5
Yes
Yes
Yes
Yes
Color
class
15.38
6
Yes
Yes
Yes
Yes
Solution
15.43
7
Yes
Yes
Yes
No
Coloring
15.15
8
Yes
Yes
Yes
No
Color
class
15.01
9
Yes
Yes
Yes
No
Solution
15.21
10
Yes
Yes
No
No
Coloring
15.66
11
Yes
Yes
No
No
Color
class
15.68
12
Yes
Yes
No
No
Solution
15.58
13
No
No
Yes
No
Coloring
14.08
14
No
No
Yes
No
Color
class
14.03
15
No
No
Yes
No
Solution
14.03
Table 1. Results
When eliminating random selection of the measure used by making only one such
measure available, our own actually, we obtained the best results, finding a better coloring for
almost all graph in the data set.
6.
Conclusions
The chart presented below underlines the improvements made by the new heuristic. Our
new function is clearly outperforming all the other methods and not only it provides the best
results itself (13, 14, 15), but also in combination with the other heuristics the results are
clearly better.
It is also worth mentioning that 𝑑𝑒𝑔𝐵∪𝑊 (𝑖) is producing poor results and they are easily
reflected by the comparison between 1, 2, 3 where all the three original heuristics are used
and 10, 11, 12 in which the suspected worse heuristic was excluded. Not only the original
algorithm is working better without the last heuristic but also our new approximation is
improving it.
The usage of different commitment levels is debatable due to their close results in all
mixed cases. However it can be exploitable on particular kind of graphs or in combination
with a proper set of heuristics.
Our work demonstrates that there is still place for more improvements and a better
understanding on how the heuristic behavior is influencing the general solution combined
with new ideas could lead to better results.
Figure 2. Chart of results obtained using various measures and commitment levels
Every color is related to a particular set of measures.
References
[1] – Dowsland K.A., Thompson J.M., An improved ant colony optimization heuristic for
graph coloring, 2007
[2] – Costa D., Hertz A., Ants can colour graphs, J. Oper. Res. Soc. 48 (1997) 295–305.
[3] – Comellas F., Ozon J., An ant algorithm for the graph coloring problem, s.n, s.l., s.a.
[4] – Hertz A., Zufferey N., A New Ant Algorithm for Graph Coloring, s.n, s.l., s.a.
[5] – Bui T.N, Nguyen T.H., Patel C.M., Phan K.T., An Ant-Based Algorithm for Coloring
Graphs, s.n, s.l., s.a.
[6] – Dorigo M., Giambardella L.M., Ant colonies for the traveling salesman problem , s.n.,
s.l., 1996
[7] – Delahaye, Jean-Paul, “The Science Behind Sudoku”, Scientific American magazine,
June 2006.