202
advertisement

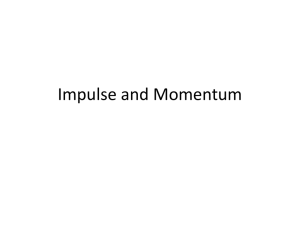
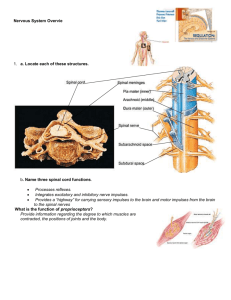
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 00 (2014) 000–000 www.elsevier.com/locate/procedia “APISAT2014”, 2014 Asia-Pacific International Symposium on Aerospace Technology, APISAT2014 Fuel-optimal Impulsive Satellite Formation Reconfiguration with Improved Semi-analytical Global Search Algorithm Youngkwang Kim, Sang-Young Park* Department of Astronomy, Yonsei University, 120-749, Seoul, Republic of Korea Abstract In this paper, the semi-analytical global search algorithm, for the time-fixed fuel-optimal impulsive coplanar satellite formation reconfiguration problem in near-circular orbits, is improved. The global search algorithm utilizes analytical results to efficiently find local optimal solutions. By applying the boundary and optimality conditions as hard constraints rather than soft constraints, the accuracy issue of the previous global search algorithm is resolved. This improvement is subsequently confirmed in a simulation. With the modified global search algorithm, optimal and sub-optimal solutions are found and are analysed for reconfigurations between periodic relative orbits. © 2014 The Authors. Published by Elsevier Ltd. Peer-review under responsibility of Chinese Society of Aeronautics and Astronautics (CSAA). Keywords: Impulsive trajectory; Fuel-optimality; Global search; Primer vector; 1. Introduction This study addresses the time-fixed, fuel-optimal impulsive coplanar satellite formation reconfiguration problem in near-circular orbits. By assuming impulse-like thrusting with a constant specific impulse engine, fuel optimality can be achieved by minimizing the total characteristic velocity with a given initial state, terminal state, and transfer time. The necessary and sufficient conditions for linear optimal impulsive trajectory problems can be analysed through the well-known primer vector theory [1, 2, 3]. As regards analytical approaches to the problem, the basic starting-point is to use optimal primer vector histories in order to find the optimal transfer solutions [4, 5, 6]. However, the complexity of the problem imposes the * Corresponding author. Tel.: +82-2123-5687. E-mail address: spark624@yonsei.ac.kr 1877-7058 © 2014 The Authors. Published by Elsevier Ltd. Peer-review under responsibility of Chinese Society of Aeronautics and Astronautics (CSAA). 2 Youngkwang Kim/ Procedia Engineering 00 (2014) 000–000 limitations of the analytical approaches either on the boundary conditions or on the number of impulses. Recently, a semi-analytical algorithm that can cover not only all the boundary conditions but also two-, three-, and four-impulse transfers, was developed by the authors [7]. Based on the analytical results for the optimality of primer vectors, the global search algorithm allows the identification of the optimal solutions satisfying the boundary and optimality conditions. The semi-analytical global search strategy not only provides multiple local optimal solutions, but also improves the efficiency of the global search as the semi-analytical solutions reduce the number of unknowns to a maximum of two. Previously, the solutions from the systems of nonlinear equations were found by minimizing the error norm. However, in some cases this approach caused issues with the inaccuracy of the solutions. The current study set out to improve the semi-analytical algorithm for the addressed issue, and to conduct a comprehensive analysis of the coplanar fuel-optimal impulsive formation reconfiguration between periodic orbits. To achieve this objective, in the global search algorithm, the minimization process of the boundary and optimality errors was replaced with a non-linear equation solving the process of the boundary and optimality errors. A second objective was to analyse the total characteristic velocities and the maximum impulse magnitude for the optimal and sub-optimal impulsive transfers between periodic relative orbits with the modified global search algorithm. In section II, the problem statement, for the time-fixed fuel-optimal impulsive coplanar satellite formation reconfiguration problem in near-circular orbits, is laid out. Section III explains how the semi-analytical global search algorithm solves that problem. Section IV provides and analyses the simulation results of the formation reconfiguration. The conclusion of this paper is presented in the last section. 2. Problem Statement This section provides the definition of the optimal impulsive satellite formation reconfiguration. In the following subsections, the dynamics, definition of the optimization problem, necessary conditions for optimality, and reconfiguration between periodic relative orbits are explained. 2.1. Dynamics The spacecraft’s coplanar relative motion with respect to a circular reference orbit can be described with the well-known HCW equations, which are represented in the RSW (R-Radial, S-along-track, and W-cross-track directions) coordinate system described in Fig. (1a). To describe the coplanar relative motion, we define the state vector as follows: 𝐗 = [𝑥 𝑦 𝑥̇ 𝑦̇ ]𝑇 (1) where 𝑥 is the spacecraft’s position in the radial direction, 𝑦 is the spacecraft’s position in the along-track direction, and the dot ( ̇ ) denotes the time differentiation 𝑑 ⁄𝑑𝑡. We assume the time domain 𝑡 ∈ [0, 𝑡𝑓 ], and the spacecraft’s relative motion includes countable jump discontinuities at 𝑡𝑖 from the left side. From the HCW equations and this assumption, the equations for the motion can be expressed as follows: 𝐗̇(𝑡) = 𝐀𝐗(𝑡) when 𝑡𝑓 ≥ 𝑡 ≥ 0 and 𝑡 ≠ 𝑡𝑖 (2a) 𝐥𝐢𝐦 𝐗(𝑡) = 𝐗(𝑡𝑖 ) + 𝐁𝚫𝐯𝑖 (2b) 𝑡→𝑡𝑖 + where 𝚫𝐯𝑖 ∈ ℝ2 is the 𝑖 th impulse vector; and 𝐀 and 𝐁 can be found from the results given in [7]. The mean motion of the reference satellite 𝑛 has been taken as 1 for the sake of simplicity, and the time unit is given as TU = 𝑃/2𝜋 where 𝑃 is the orbital period of the reference satellite. 2.2. The optimization problem The objective of optimization is to minimize the total characteristic velocity ∑𝑖 ‖𝚫𝐯𝑖 ‖ while satisfying the boundary conditions for 𝐗(0) = 𝐗 0 and 𝐗(𝑡𝑓 ) = 𝐗𝑓 with the desired states 𝐗 0 and 𝐗𝑓 given as initial and final time points. Because the boundary conditions can be represented with one vector equation, an augmented performance index can be constructed as follows [2]: 𝐽 ≡ ∑𝑖 ‖𝚫𝐯𝑖 ‖ + 𝛌𝑇 (∑𝑖 𝚽(𝑡𝑓 − 𝑡𝑖 )𝐁𝚫𝐯𝑖 − 𝐊) (3) Youngkwang Kim/ Procedia Engineering 00 (2014) 000–000 a 3 b Fig. 1. (a) Coordinate system description for the relative motion; (b) Relative periodic orbit geometry where α is the semi-major axis of the ellipse and β is a pseudo phase angle. where 𝛌 is the Lagrange multiplier, 𝚽 is the fundamental matrix of the transformed system satisfying 𝚽(𝑡) = 𝑒 𝐀𝑡 , and the definition of the generalized boundary condition vector 𝐊 is given as 𝐊(𝑡𝑓 ; 𝐗 0 , 𝐗𝑓 ) ≡ 𝐗𝑓 − 𝚽(𝑡𝑓 )𝐗 0 (4) Note that if 𝐗(0) = 𝐗 0 , the boundary condition 𝐗(𝑡𝑓 ) = 𝐗𝑓 is equivalent to ∂𝐽/𝜕𝛌 = 0 [7]. For the linear impulsive trajectory problem, the necessary conditions for optimality can be expressed with the following primer vector [2]: 𝚫𝐯𝑖 = 𝐩𝑖 ; 𝐩𝑖 ∙ 𝐩𝑖 − 1 = 0; 𝑡𝑖 = 𝑡0 , 𝑜𝑟 ‖𝚫𝐯𝑖 ‖𝐩̇𝑖 ∙ 𝐩𝑖 = 0, 𝑜𝑟 𝑡𝑖 = 𝑡𝑓 (5) ‖𝚫𝐯𝑖 ‖ where the primer vector is defined as 𝐩(𝑡) ≡ 𝐁 𝑇 𝚽 𝑇 (𝑡𝑓 − 𝑡)𝛌, and 𝐩𝑖 = 𝐩(𝑡𝑖 ). If the optimal primer vector time history is known, the optimal transfer solution including the number, times, and directions of the impulses is determined. From Eq. (5) and ∂𝐽/𝜕𝛌 = 0, the impulse magnitudes can be expressed as [7]: [‖𝚫𝐯1 ‖ ⋯ ‖𝚫𝐯𝑁 ‖]T = 𝐂 + 𝐊 (6) + where 𝐂 ≡ [𝚽(𝑡𝑓 − 𝑡1 )𝐁𝐩1 ⋯ 𝚽(𝑡𝑓 − 𝑡𝑁 )𝐁𝐩𝑁 ] is an impulse-magnitude-associate matrix, and 𝐂 is the Moore-Penrose pseudo inverse of 𝐂 [8]. Note that if 𝐂 is invertible, then 𝐂 + = 𝐂 −1 ; but otherwise 𝐂 + ≠ 𝐂 −1 , and Eq. (6) does not provide the exact solution but provides the minimum norm solution. The boundary condition ∂𝐽/𝜕𝛌 = 0 is satisfied if and only if [7]: ‖(𝐂𝐂 + − 𝐈4 )𝐊‖ = 0 (7) To find the solution to the optimization problem, it is required to find the optimal primer vector time history satisfying Eq. (5) and Eq. (7). The impulse vectors as well as the total characteristic velocities can be calculated with Eq. (5) and Eq. (6). 2.3. Reconfiguration between periodic orbits In the case of relative motion near circular orbits, the periodic orbits are ellipses as shown in Fig. (1b). The periodic relative motion of the spacecraft can be parameterized with the semi-major axis 𝛼 and pseudo phase angle 𝛽(= 𝛽0 − 𝑡): 𝛼 𝐗(𝑡) = [cos(𝛽0 − 𝑡) 2 sin(𝛽0 − 𝑡) sin(𝛽0 − 𝑡) −2 cos(𝛽0 − 𝑡)]𝑇 2 where 𝛽0 is the initial pseudo phase angle measured at 𝑡 = 0. If the desired final state is also on a periodic relative orbit, it is satisfied that: 𝛼+Δ𝛼 𝑇 𝐗𝑓 = [cos(𝛽𝑓 ) 2 sin(𝛽𝑓 ) sin(𝛽𝑓 ) −2 cos(𝛽𝑓 )] 2 where 𝛽𝑓 is the desired pseudo phase angle in the final state. From Eq. (4), the generalized boundary condition vector for reconfigurations between periodic relative orbits can be given as: 4 Youngkwang Kim/ Procedia Engineering 00 (2014) 000–000 1 𝐊 = 𝐗𝑓 − 𝐗(𝑡𝑓 ) = 𝜇 [− cos(𝜈) 2 sin(𝜈) a b c d 1 2 sin(𝜈) 𝑇 cos(𝜈)] (8) Fig. 2. (a) Conceptual description of the semi-analytical global search algorithm; (b) Example of two-impulse trajectory optimization; (c) Example of indirect optimization for three-impulse trajectory with a midcourse impulse (d) Example of indirect optimization for three- or fourimpulse trajectory with two-midcourse impulses. where 𝜇 = √𝛾12 + 𝛾22, ν = atan2 (𝛾1 , −𝛾2 ), and 𝛾1 and 𝛾2 are defined as: 𝛾1 = (𝛼 + Δ𝛼) sin(𝛽𝑓 ) − 𝛼 sin(𝛽0 − 𝑡𝑓 ); 𝛾2 = (𝛼 + Δ𝛼) cos(𝛽𝑓 ) − 𝛼 cos(𝛽0 − 𝑡𝑓 ) Thus, from Eq. (8), the reconfigurations between the periodic relative orbits can be represented with three parameters (𝑡𝑓 , 𝜇, 𝜈). Youngkwang Kim/ Procedia Engineering 00 (2014) 000–000 5 3.Modified global search algorithm The semi-analytical global search algorithm used in the current study has been modified from the one found in previous research, as detailed in Ref. [7]. The global search algorithm is based on the classification of trajectories. The analytical results for each category of trajectories are obtained and applied to the global search algorithm. The analytical results effectively reduce the number of unknown transfer parameters to a maximum of two. Therefore, the global search can be efficiently conducted on the basis of the analytical results. This approach can provide Table 1. Optimal transfer solutions for the case of t f − t 0 = 6.911TU and K = [102.3 1376 497.3 −179.5]T . 𝜁𝑘 𝜁𝑘 (current paper) (previous research) 0.9221 0.1536 [ ],[ ] −0.3896 0.9881 5.062E-15 5.062E-15 (38.23, 116.3, 110.3) 0.02210 0.02210 0.5843 [ ],[ ],[ ] 0.9998 0.8116 −0.9998 4.754E-7 8.470E-3 (88.40,143.3, 50.17) [ 0.05366 0.05366 0.8039 ],[ ],[ ] 0.5947 −0.9986 0.9986 2.429E-8 1.134E-6 𝐽(m/TU) Impulse Sequence 𝑡𝑖 − 𝑡0 (TU) ‖𝚫𝐯𝑖 ‖ (m/TU) 𝐩𝑖 350.7 MM (1.426, 5.063) (233.8, 116.9) 264.9 IMM (0, 2.069, 5.067) 281.9 MMF (2.392, 5.258, 6.911) multiple local optimal solutions including the global optimal solution satisfying the Lawden condition |𝐩(𝑡)| ≤ 1 during the transfer, which is a sufficient condition for the time-fixed linear, fuel-optimal impulsive transfer problems. The semi-analytical global search algorithm applies different solving strategies to the problem based on the properties of the categories of the impulsive trajectories as shown in Fig 2a. For instance, two-impulse trajectories (i.e., 𝑁 ≤ 2) can be determined if the times of the impulses (𝑡1 , 𝑡2 ) are known [7]: −1 𝚫𝐯 [ 1 ] = [𝚽(𝑡𝑓 − 𝑡1 )𝐁 𝚽(𝑡𝑓 − 𝑡2 )𝐁] 𝐊 (9) 𝚫𝐯2 Hence, the global search algorithm can minimize the total characteristic velocity by finding the local optimal times of the impulses (𝑡1∗ , 𝑡2∗ ) with MATLAB-fmincon, a solver for nonlinear-programming problems, and multiple initial guesses. In Fig. 2b, an example of optimization of the two-impulse trajectory is given. There are two local optimal points, and by using multiple initial guesses, the best one can be picked. The semi-analytical global search algorithm applies a generalized indirect search algorithm for three- or fourimpulse transfers. In cases where three or four impulses are required for the transfer, the trajectories cannot be determined by the times of the impulses only. The generalized indirect search algorithm finds the unknown parameters for the optimal trajectory based on multiple initial guesses and analytical equations derived from the necessary conditions [7]. There is a reason for introducing a generalized optimization algorithm: for three- or fourimpulse transfers, there is more than one solving procedure, as there exist different types or solutions of unknowns (i.e., the times and directions of impulses). It is therefore efficient to generalize the different solving procedures in developing the global search algorithm. In the generalized indirect optimization algorithm, the boundary condition and optimality condition errors are defined as follows: 𝜁𝑘 = ‖(𝐂𝐂 + −𝐈4 )𝐊‖ ‖𝐊‖ ∑𝑖 |𝐩2𝑖 − (10a) 𝜁𝑝 = 1| (10b) where 𝜁𝑘 is the boundary condition error, and 𝜁𝑝 is the optimality error. The generalized indirect optimization algorithm can solve the optimization problem either by minimizing 𝜁𝑘 + 𝜁𝑝 or by solving 𝜁𝑘 = 𝜁𝑝 = 0. As shown in Fig 2a, the indirect optimization algorithm is applied to three-impulse trajectories with a midcourse impulse. In this case, the primer vectors can be represented with a set of unknown parameters, the time and direction of the midcourse impulse, and the magnitude of the time derivative of the primer vector at the time. Among the unknown parameters, the analytical solution to the magnitude of the time derivative of the primer vector can be found from |𝐩2𝑓 − 1| = 0 [7]. Thus, the time and direction of the midcourse impulse can be found from the generalized indirect optimization algorithm. For instance, Fig. 2c describes a contour diagram for (𝜁𝑘 + 𝜁𝑝 ) with 6 Youngkwang Kim/ Procedia Engineering 00 (2014) 000–000 respect to the time and direction of the midcourse impulse. By using multiple initial guesses, feasible optimal parameters can be identified. For three- or four-impulse trajectories with more than one midcourse impulse, the primer vectors can be represented with a set of unknown parameters as the times and directions of the midcourse impulses. By applying 𝐩̇ 𝑖 ∙ 𝐩𝑖 = 0 for midcourse impulses, the analytical solutions to the directions of the midcourse impulses can be evidenced [7]. Therefore, the times of the midcourse impulses remain as unknowns. Again, in this configuration the unknown parameters can be found with the generalized indirect optimization algorithm. For example, Fig. 2d describes a contour diagram for (𝜁𝑘 + 𝜁𝑝 ) with respect to the times of the midcourse impulses. By using multiple initial guesses, feasible optimal parameters can be identified. Table 2. Optimal and sub-optimal solutions to reconfigurations between periodic orbits when 𝑡𝑓 − 𝑡0 = 5𝜋⁄4. Optimal 𝐽 (m/TU) Optimal max ‖𝚫𝐯𝑖 ‖ Optimal Impulse Sequence Sub-optimal 𝐽 (m/TU) Sub-optimal max ‖𝚫𝐯𝑖 ‖ Sub-optimal Impulse Sequence ν = 0° 485.9 368.9 IMF 488.4 341.2 IF 30° 518.8 295.6 IMF 518.8 292.8 IF 60° 434.5 316.9 MMF 438.9 367.2 IMF 90° 348.9 145.4 IMF 446.1 346.2 IM 120° 328.0 143.4 IMF 483.2 300.8 IM 150° 387.8 211.1 IMM 388.2 216.1 IMF 𝑖 𝑖 Table 3. Optimal and sub-optimal solutions to reconfigurations between periodic orbits when t f − t 0 = 2π. Optimal 𝐽 (m/TU) Optimal max ‖𝚫𝐯𝑖 ‖ Optimal Impulse Sequence Sub-optimal 𝐽 (m/TU) Sub-optimal max ‖𝚫𝐯𝑖 ‖ Sub-optimal Impulse Sequence ν = 0° 250 125 IMF 430 371.4 MM 30° 258.7 127.239 IMM 435.7 371.0 IM 60° 288.7 132.1 IMM 346.5 132.6 IMF 90° 324.1 103.4 IMMF 347.0 153.0 IMM/MMF 120° 288.7 132.1 MMF 346.5 132.6 IMF 150° 258.7 127.2 MMF 271.5 129.2 IMF 𝑖 𝑖 Previously, the unknowns for the optimization problem were found by minimizing the boundary condition and optimality errors. A set of unknown parameters 𝛘∗ can be given as 𝛘∗ = arg min (𝜁𝑘 (𝛘) + 𝜁𝑝 (𝛘)), if 𝜁𝑘 + 𝜁𝑝 ≤ 𝜖 (11) where 𝜖 is the predefined acceptance tolerance. Such minimization can be performed with MATLAB-fmincon but the speed of the convergence is notably slow in some cases, causing inaccuracy issues with the algorithm. To overcome the inaccuracy issue caused by the slow convergence, Eq. (11) is replaced with the following equation: 𝜁𝑘 (𝛘) 0 Find 𝛘∗ such that [ ] = [ ] with tolerance 𝜖 (12) 𝜁𝑝 (𝛘) 0 In Eq. (12), non-linear equations of errors are solved for the unknown parameters 𝛘. To solve Eq. (12), the modified indirect optimization algorithm utilizes MATLAB-fsolve, a root-finding algorithm. As an example, the boundary condition errors are calculated with both the previous indirect optimization algorithm and the modified indirect optimization algorithm. The results are presented in Table 1. In the table, regarding impulse sequence, the letter I indicates the initial impulse, M indicates a midcourse impulse, and F indicates the final impulse. Compared to the Youngkwang Kim/ Procedia Engineering 00 (2014) 000–000 7 previous algorithm solving Eq. (11), the modified algorithm solving Eq. (12) reduces the boundary condition errors by factors of 102 ~104 . Therefore, the inaccuracy issue of the algorithm is successfully resolved in this study. Besides, by replacing Eq. (11) with Eq. (12), not only the accuracy, but also the speed of the algorithm is improved. After finding the local optimal solutions, the global search algorithm collects the information for the local optimal solutions and determines the global optimal solution with the smallest total characteristic velocity. Thus, it is possible to compare the properties of the optimal solutions and suboptimal solutions by using the global search algorithm. 4. Simulation results The total characteristic velocities and the maximum impulse magnitudes of the optimal and sub-optimal solutions are found for reconfiguration parameters 𝑡𝑓 − 𝑡0 = 5𝜋⁄4 and 2𝜋; 𝜇 = 1000, and 𝜈 = 0, 30°, 60°, 90°, 5𝜋 120°, and 150°. For each value of 𝑡𝑓 − 𝑡0 , the results are provided in Tables 2 and 3. For the cases of 𝑡𝑓 − 𝑡0 = ; 4 𝜈 = 0° and 30°, the maximum magnitudes of the impulses of the sub-optimal solutions are smaller than those of the optimal solutions. This means that although the optimal solutions usually have the smallest maximum magnitude of impulses, in some cases, the sub-optimal solutions can have the smallest maximum magnitude of impulses. For the cases of 𝑡𝑓 − 𝑡0 = 2𝜋, the optimal solution and sub-optimal solutions are symmetric with respect to 𝜈 = 90°. Moreover, the two sub-optimal solutions, which have impulse sequences IMM and MMF, present exactly the same total characteristic velocity and maximum magnitude of impulse. This observation suggests that there may be two or more equivalent global optimal solutions in some cases. 5. Conclusions The semi-analytical global search algorithm developed in this study solves the time-fixed, fuel-optimal impulsive coplanar satellite formation reconfiguration problem in near-circular orbits. This global search algorithm is distinguished from others in that it utilizes semi-analytical equations to efficiently find local optimal solutions by removing unknown parameters. In this paper, the global search algorithm is modified to improve accuracy by applying the boundary and optimality conditions as hard constraints rather than soft constraints. In the simulation, it is verified that this change improves the accuracy of the solutions in the relative state error at the final time point. With this modified global search algorithm, optimal and sub-optimal solutions can be found for reconfigurations between periodic relative orbits. By comparing the maximum magnitudes of their impulses, it is found that although the optimal solutions present the smallest maximum magnitude of impulse in most cases, the sub-optimal solutions can have the smallest maximum impulse magnitude when their total characteristic velocities are similar. This means that if there is a constraint on the maximum impulse magnitude, a sub-optimal solution can be chosen instead of the optimal solution, although this instance would be rare. On the other hand, in our reconfiguration simulation, it was observed that two distinct sub-optimal solutions had exactly the same total characteristic velocities. The simulation result suggests that there may exist more than two equivalent fuel-optimal solutions and corresponding optimal primer vectors in some cases. In the simulations conducted in this paper, all the global optimal solutions satisfied the Lawden condition for optimality. Acknowledgements This work was supported by the National Research Foundation of Korea through the Space Core Technology Development Program funded by the Ministry of Science, ICT & Future Planning. References [1] Lawden, D. F., Optimal trajectories for space navigation, 1st edition, Butterworth, London, England, 1963. [2] Carter T.E., “Necessary and Sufficient Conditions for Optimal Impulsive Rendezvous with Linear Equations of Motion”, Dynamics and Control, Vol. 10, No. 3, 2000, pp. 219-227. 8 Youngkwang Kim/ Procedia Engineering 00 (2014) 000–000 [3] Prussing, J. E., “Primer vector theory and applications”, Spacecraft Trajectory Optimization, edited by Conway, B., Cambridge University Press, Cambridge, 2011, pp.16-36. [4] Prussing, J.E., “Optimal two- and three-impulse fixed-time rendezvous in the vicinity of a circular orbit”, AIAA Journal, Vol. 8, No. 7, 1970, pp. 1221–1228. [5] Carter T., and Alvarez, S., “Quadratic-based computation of four-impulse optimal rendezvous near circular orbit”, Journal of Guidance, Control, and Dynamics, Vol. 23, No. 1, 2000, 109-117. [6] Carter, T., and Humi, M., “A new approach to impulsive rendezvous near circular orbit”, Celestial Mechanics and Dynamical Astronomy, Vol. 112, 2012, pp. 385-426. [7] Youngkwang Kim, Sang-Young Park and Chandeok Park, “Semi-Analytical Global Search Algorithm for Fuel-Optimal Satellite Formation Reconfiguration: Impulsive-Thrust Approach”, Proceedings of the AAS/AIAA Astrodynamics Conference 2013, held in Hilton Head, SC., AAS 13-795. [8] Ben-Israel, A. and Greville, T., “Generalized Inverses: Theory and Applications”, Springer New York, New York, NY, 2003.