LN8-Constrained opti..
advertisement

Lecture Notes #8
CONSTRAINED OPTIMIZATION
1. Effects of a Constraint
The primary purpose of imposing a constraint is to recognize the limiting factors present in the optimization
problems. In constraint optimization the goal is to find the optimum values for the objective function 𝑦 = 𝑓(𝑥1 , 𝑥2 ) ,
that is find the value for 𝑥1 and 𝑥2 that yields the extremum value for 𝑦, subject to constraint 𝑔(𝑥1 , 𝑥2 ) = 𝑐.
1.1. Total-Differential Approach
First find the total-differential of 𝑦 = 𝑓(𝑥1 , 𝑥2 ) and set it equal to zero.
𝑑𝑦 =
𝜕𝑦
𝜕𝑦
𝑑𝑥1 +
𝑑𝑥
𝜕𝑥1
𝜕𝑥2 2
𝑑𝑦 = 𝑓1 𝑑𝑥1 + 𝑓2 𝑑𝑥2 = 0
Form which we obtain
𝑑𝑥2
𝑓1
=−
𝑑𝑥1
𝑓2
Now find the total differential of the constraint function,
𝑔1 𝑑𝑥1 + 𝑔2 𝑑𝑥2 = 𝑑𝑐 = 0
(Note that since c is a constant, dc = 0)
which provides us
𝑑𝑥2
𝑔1
=−
𝑑𝑥1
𝑔2
Thus,
𝑓1 𝑔1
=
𝑓2 𝑔2
Rearranging this relation and using the constraint expression we get two equations which we can solve for the
optimum values of 𝑥1 and 𝑥2 .
𝑓1 𝑔2 − 𝑓2 𝑔1 = 0
𝑔(𝑥1 , 𝑥2 ) − 𝑐 = 0
Example
In the utility function 𝑈 = 𝑥1 𝑥2 + 2𝑥1 , find the values, quantities, or goods 𝑥1 and 𝑥2 such that utility 𝑈 is maximized,
subject to the budget constraint 𝑃1 𝑥1 + 𝑃2 𝑥2 = 𝐵. Let 𝑃1 = $4, 𝑃2 = $2, and 𝐵 = $60.
Maximize 𝑈 = 𝑥1 𝑥2 + 2𝑥1 subject to 4𝑥1 + 2𝑥2 = 60
First, the total differential of U:
LN 8—Constrained Optimization
Page 1 of 38
𝑑𝑈 = (𝑥2 + 2)𝑑𝑥1 + 𝑥1 𝑑𝑥2 = 0
𝑑𝑥2
𝑥2 + 2
=−
𝑑𝑥1
𝑥1
Next, the total differential of the budget constraint:
4𝑑𝑥1 + 2𝑑𝑥2 = 0
𝑑𝑥2
4
=−
𝑑𝑥1
2
Setting the write-hand-side quotients equal,
𝑥2 + 2
=2
𝑥1
Rearranging the above, and along with the budget constraint, we have
2𝑥1 − 𝑥2 = 2
4𝑥1 + 2𝑥2 = 60
which yields,
𝑥1 = 8, 𝑥2 = 14
Substituting these values in the utility function, we obtain
𝑈 = (8)(14) + 2(8) = 128
1.2.
The Lagrange-Multiplier Method of Optimization
In general, given an objective function
𝑦 = 𝑓(𝑥1 , 𝑥2 )
subject to the constraint
𝑔(𝑥1 , 𝑥2 ) = 𝑐
The objective function and the constraint are combined in a format called the 𝐿𝑎𝑔𝑟𝑎𝑛𝑔𝑖𝑎𝑛 function as
𝑍 = 𝑓(𝑥1 , 𝑥2 ) + 𝜆[𝑐 − 𝑔(𝑥1 , 𝑥2 )]
To find the stationary values of Z, the first order condition is
𝑍𝜆 = 𝑐 − 𝑔(𝑥1 , 𝑥2 ) = 0
𝑍1 = 𝑓1 − 𝜆𝑔1 = 0
𝑍2 = 𝑓2 − 𝜆𝑔2 = 0
The first order conditions yield three equations with three unknowns, which include the original unknowns 𝑥1 and 𝑥2
plus the multiplier 𝜆.
LN 8—Constrained Optimization
Page 2 of 38
Now, using the above example, we can incorporate the constraint in the objective function as follows:
𝑍 = (𝑥1 𝑥2 + 2𝑥1 ) + 𝜆(60 − 4𝑥1 − 2𝑥2 )
The term λ (𝑙𝑎𝑚𝑏𝑑𝑎) above is known as the Lagrange Multiplier. Taking the partial derivative of the
𝐿𝑎𝑔𝑟𝑎𝑛𝑔𝑖𝑎𝑛 𝑓𝑢𝑛𝑐𝑡𝑖𝑜𝑛 with respect to 𝑥1 , 𝑥2 , and λ and setting them equal to zero, we have
𝜕𝑧
= 60 − 4𝑥1 − 2𝑥2 = 0
𝜕𝜆
𝜕𝑧
= 𝑥2 + 2 − 4𝜆 = 0
𝜕𝑥1
𝜕𝑧
= 𝑥1 − 2𝜆 = 0
𝜕𝑥2
−4
[ 0
1
−2
1
0
0 𝑥1
−60
−4] [𝑥2 ] = [ −2]
−2 𝜆
0
→
𝑥1
8
[𝑥2 ] = [14]
𝜆
4
Note that using the Lagrange Multiplier “trick” the term 𝜆(60 − 4𝑥1 − 2𝑥2 ) in the Lagrangian function allows us to
determine the values of 𝑥1 and 𝑥2 such the budget constraint is exhausted (via 𝜕𝑍 ⁄𝜕𝜆 = 0) and Z reaches the
extremum (here maximum) via 𝜕𝑍 ⁄𝜕𝑥1 = 𝜕𝑍 ⁄𝑥2 = 0. In other word, finding the values for 𝑥1 and 𝑥2 such that when
the budget constraint is exhausted, 𝑍 = 𝑈 = 𝑥1 𝑥2 + 2𝑥1 . Thus, the same values of 𝑥1 and 𝑥2 give us extremum (her the
maximum) for 𝑈.
𝑍 = (𝑥1 𝑥2 + 2𝑥1 ) + 𝜆(60 − 4𝑥1 − 2𝑥2 )
𝑍 = 8 × 14 + 2 × 8 + 4(60 − 4 × 8 − 2 × 14) = 268 + 4(0) = 268
Example
Find the stationary values of
𝑦 = 𝑥1 𝑥2
subject to
𝑥1 + 𝑥2 = 6
The Lagrangian function is
𝑍 = 𝑥1 𝑥2 + 𝜆(6 − 𝑥1 − 𝑥2 )
𝑍𝜆 = 6 − 𝑥1 − 𝑥2 = 0
𝑍1 = 𝑥2 − 𝜆 = 0
𝑍2 = 𝑥1 − 𝜆 = 0
0
[−1
−1
1
0
1
1 𝜆
6
1] [𝑥1 ] = [0]
0 𝑥2
0
→
→
→
−𝜆 + 𝑥1 + 𝑥2 = 6
−𝜆 + 𝑥1 + 𝑥2 = 0
−𝜆 + 𝑥1 + 𝑥2 = 0
→
𝜆
3
[𝑥1 ] = [3]
𝑥2
3
LN 8—Constrained Optimization
Page 3 of 38
1.3. An Interpretation of the Lagrange Multiplier
In the Lagrangian function, 𝑍 = 𝑓(𝑥1 , 𝑥2 ) + 𝜆[𝑐 − 𝑔(𝑥1 , 𝑥2 )], λ shows the responsiveness of optimum value of Z, and
hence the objective function, to changes in the constraint parameter c. 1 A change in the constraint would cause a shift
in the constraint function, thus altering the optimal solution.
Now, using the chain rule find 𝑑𝑍 ⁄𝑑𝑐 from
𝑍 = 𝑓(𝑥1 , 𝑥2 ) + 𝜆[𝑐 − 𝑔(𝑥1 , 𝑥2 )]
𝑑𝑍
𝑑𝑥1
𝑑𝑥2
𝑑𝜆
𝑑𝑥1
𝑑𝑥2
= 𝑓1
+ 𝑓2
+ [𝑐 − 𝑔(𝑥1 , 𝑥2 )]
+ 𝜆 (1 − 𝑔1
− 𝑔2
)
𝑑𝑐
𝑑𝑐
𝑑𝑐
𝑑𝑐
𝑑𝑐
𝑑𝑐
𝑑𝑍
𝑑𝑥1
𝑑𝑥2
𝑑𝜆
= (𝑓1 − 𝜆𝑔1 )
+ (𝑓2 − 𝜆𝑔2 )
+ [𝑐 − 𝑔(𝑥1 , 𝑥2 )]
+𝜆
𝑑𝑐
𝑑𝑐
𝑑𝑐
𝑑𝑐
Given the FOC condition,
𝑐 − 𝑔(𝑥1 , 𝑥2 ) = 0
𝑓1 − 𝜆𝑔1 = 0
𝑓2 − 𝜆𝑔2 = 0
then
𝑑𝑍
𝑑
[𝑓(𝑥1 , 𝑥2 )] = 𝜆
=
𝑑𝑐 𝑑𝑐
Thus, if c is the only exogenous variable in the constraint, then λ represents the change in the optimal value of Z, hence
a change in the optimal value of the objective function, per unit change in the constraint.
1.4. n-Variable and 𝐌𝐮𝐥𝐭𝐢𝐜𝐨𝐧𝐬𝐭𝐫𝐚𝐢𝐧𝐭 Cases
Consider the multivariable objective function,
𝑦 = 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 )
subject to the constraint
𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) = 𝑐
The Lagrangian function is
𝑍 = 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) + 𝜆[𝑐 − 𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 )]
1
For values of 𝑥1 and 𝑥2 such that the constraint holds, 𝑔(𝑥1 , 𝑥2 ) − 𝑐 = 0. Therefore, the functions 𝑍 and 𝑓(𝑥1 , 𝑥2 ) have the same
values at the optimum values of 𝑥1 and 𝑥2 . Maximizing the objective function 𝑈 = 𝑥1 𝑥2 + 2𝑥1 subject to the constraint 4𝑥1 +
2𝑥2 = 60, by using the Lagrangian method,
𝑍 = (𝑥1 𝑥2 + 2𝑥1 ) + 𝜆(60 − 4𝑥1 − 2𝑥2 )
we found the optimum values, 𝑥1∗ = 8 and 𝑥2∗ = 14, which yields 60 − 4 × 8 − 2 × 14 = 0. Thus, 𝑍 = 𝑥1 𝑥2 + 2𝑥1 = 𝑈
In the context of utility maximization, the objective function is 𝑈 = 𝑓(𝑥1 , 𝑥2 ) and 𝑐 is the budget or income. Thus, the
responsiveness of 𝑈 to changes in 𝑐, 𝜆 = 𝑑𝑈 ⁄𝑑𝑐, represents the marginal utility of income. This is discussed further below.
LN 8—Constrained Optimization
Page 4 of 38
The FOC consists of 𝑛 + 1 simultaneous equations,
𝑍𝜆 = 𝑐 − 𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) = 0
𝑍1 = 𝑓1 − 𝜆𝑔1 = 0
𝑍2 = 𝑓2 − 𝜆𝑔2 = 0
⋮= 𝑓𝑛 − 𝜆𝑔𝑛 = 0
𝑍𝑛 = 𝑓𝑛 − 𝜆𝑔𝑛 = 0
We can also have an objective function which may be subject to more than one constraint.
𝑦 = 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 )
subject to constraints,
𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) = 𝑐
ℎ(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) = 𝑑
The Lagrangian function is then,
𝑍 = 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) + 𝜆[𝑐 − 𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 )] + µ[𝑑 − 𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 )]
The FOC in this situation is
𝑍𝜆 = 𝑐 − 𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) = 0
𝑍µ = 𝑑 − ℎ(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) = 0
(𝑖 = 1,2, … , 𝑛)
𝑍𝑖 = 𝑓𝑖 − 𝜆𝑔𝑖 = 0
2. Second-Order Condition for Constrained Optimization
2.1. Review of Unconstrained Second-Order Condition
Let’s start with the objective function 𝒚 = 𝒇(𝒙𝟏 , 𝒙𝟐 ). To explain how the addition of the constraint changes the SOC, it
is instructive to review the unconstrained SOC first. First find the first total differential of y.
𝑑𝑦 = 𝑓1 𝑑𝑥1 + 𝑓2 𝑑𝑥2
To get to the SOC, find the second order differential,
𝑑 2 𝑦 = 𝑑(𝑑𝑦) =
𝑑2𝑦 =
𝜕(𝑑𝑦)
𝜕(𝑑𝑦)
𝑑𝑥1 +
𝑑𝑥2
𝜕𝑥1
𝜕𝑥2
𝜕
𝜕
(𝑓1 𝑑𝑥1 + 𝑓2 𝑑𝑥2 )𝑑𝑥1 +
(𝑓 𝑑𝑥 + 𝑓2 𝑑𝑥2 )𝑑𝑥2
𝜕𝑥1
𝜕𝑥2 1 1
𝑑 2 𝑦 = (𝑓11 𝑑𝑥1 + 𝑓12 𝑑𝑥2 )𝑑𝑥1 + (𝑓21 𝑑𝑥1 + 𝑓22 𝑑𝑥2 )𝑑𝑥2
𝑑 2 𝑦 = 𝑓11 𝑑𝑥12 + 2𝑓12 𝑑𝑥1 𝑑𝑥2 + 𝑓22 𝑑𝑥22
This quadratic equation, with variables 𝑑𝑥1 and 𝑑𝑥2 , can be written in matrix format as follows.
LN 8—Constrained Optimization
Page 5 of 38
𝑑 2 𝑦 = [𝑑𝑥1
𝑓
𝑑𝑥2 ] [ 11
𝑓21
𝑓12 𝑑𝑥1
][
]
𝑓22 𝑑𝑥2
The determinant of the 2 × 2 matrix is the Hessian determinant
𝑓
𝑓
|𝐻| = | 11 12 |
𝑓21 𝑓22
𝑑 2 𝑦 is positive definite:
|𝑓11 | = 𝑓11 > 0
and
|
𝑓11
𝑓21
𝑓12
2
| = 𝑓11 𝑓22 − 𝑓12
> 0,
𝑓22
or
2
𝑓11 𝑓22 > 𝑓12
𝑑 2 𝑦 is negative definite:
|𝑓𝑥𝑥 | = 𝑓𝑥𝑥 < 0
and
|
𝑓11
𝑓21
𝑓12
2
| = 𝑓11 𝑓22 − 𝑓12
> 0,
𝑓22
or
2
𝑓11 𝑓22 > 𝑓12
2.2. Constrained Second-Order Differential
Note that to obtain the quadratic form in the unconstrained optimization the quantities 𝑑𝑥1 and 𝑑𝑥2 constitute two
arbitrary and independent changes. Now with the addition of the constraint 𝑔(𝑥1 , 𝑥2 ) = 𝑐 to the picture, 𝑑𝑥1 and 𝑑𝑥2
are bound to the constraint. If we take, say, 𝑑𝑥1 as an arbitrary change, 𝑑𝑥2 is dependent on 𝑑𝑥1 , as indicated by the
following
𝑔(𝑥1 , 𝑥2 ) = 𝑐
𝑑𝑔 = 𝑔1 𝑑𝑥1 + 𝑔2 𝑑𝑥2 = 0
𝑑𝑥2 = −
(𝑑𝑐 = 0)
𝑔1
𝑑𝑥
𝑔2 1
Thus, in the presence of constraint, to find the second order differential 𝑑 2 𝑦, we must treat 𝑑𝑥2 as a variable (if we
choose to treat 𝑑𝑥1 as an arbitrary change) dependent on 𝑥1 and 𝑥2 . Taken these factors into account, let’s now attend
to 𝑑 2 𝑦. Again, we will start from the beginning,
𝑑𝑦 = 𝑓1 𝑑𝑥1 + 𝑓2 𝑑𝑥2
𝑑 2 𝑦 = 𝑑(𝑑𝑦) =
𝑑2𝑦 =
𝜕(𝑑𝑦)
𝜕(𝑑𝑦)
𝑑𝑥1 +
𝑑𝑥2
𝜕𝑥1
𝜕𝑥2
𝜕
𝜕
(𝑓1 𝑑𝑥1 + 𝑓2 𝑑𝑥2 )𝑑𝑥1 +
(𝑓 𝑑𝑥 + 𝑓2 𝑑𝑥2 )𝑑𝑥2
𝜕𝑥1
𝜕𝑥2 1 1
(𝐴)
From here on the complications from the presence of the constraint are introduced—where 𝑑𝑥2 is treated as a
dependent variable. Consider the first term of the right-hand-side of second order total differential (A).
𝜕
𝜕
𝜕
(𝑓1 𝑑𝑥1 + 𝑓2 𝑑𝑥2 )𝑑𝑥1 =
(𝑓1 𝑑𝑥1 )𝑑𝑥1 +
(𝑓 𝑑𝑥 )𝑑𝑥1
𝜕𝑥1
𝜕𝑥1
𝜕𝑥1 2 2
The first term on the right-hand-side of this expression is
𝜕
(𝑓 𝑑𝑥 )𝑑𝑥1 = 𝑓11 𝑑𝑥12
𝜕𝑥1 1 1
The second term, however, must be treated differently because 𝑑𝑥2 is no longer treated as an arbitrary change. It is
now a function of, dependent on, 𝑥1 and 𝑥2 due to the constraint.
LN 8—Constrained Optimization
Page 6 of 38
𝜕
𝜕𝑑𝑥2
(𝑓 𝑑𝑥 )𝑑𝑥1 = (𝑓21 𝑑𝑥2 + 𝑓2
) 𝑑𝑥1
𝜕𝑥1 2 2
𝜕𝑥1
Thus, the first term in (A) is written as
𝜕
𝜕𝑑𝑥2
(𝑓 𝑑𝑥 + 𝑓2 𝑑𝑥2 )𝑑𝑥1 = 𝑓11 𝑑𝑥12 + (𝑓21 𝑑𝑥2 + 𝑓2
) 𝑑𝑥1
𝜕𝑥1 1 1
𝜕𝑥1
In a similar fashion, the second term of (A) is written as
𝜕
𝜕𝑑𝑥2
(𝑓 𝑑𝑥 + 𝑓2 𝑑𝑥2 )𝑑𝑥2 = (𝑓12 𝑑𝑥1 + 𝑓2
) 𝑑𝑥2 + 𝑓22 𝑑𝑥22
𝜕𝑥2 1 1
𝜕𝑥2
Thus, the second differential can be written as,
𝜕𝑑𝑥2
𝜕𝑑𝑥2
𝑑 2 𝑦 = 𝑓11 𝑑𝑥12 + 2𝑓12 𝑑𝑥1 𝑑𝑥2 + 𝑓22 𝑑𝑥22 + +𝑓2 (
𝑑𝑥1 +
𝑑𝑥2 )
𝜕𝑥1
𝜕𝑥2
Note that the parenthetical expression in the second order differential can be simplified to
𝜕𝑑𝑥2
𝜕𝑑𝑥2
𝑑𝑥1 +
𝑑𝑥2 = 𝑑(𝑑𝑥2 ) = 𝑑 2 𝑥2
𝜕𝑥1
𝜕𝑥2
Thus,
𝑑 2 𝑦 = 𝑓11 𝑑𝑥12 + 2𝑓12 𝑑𝑥1 𝑑𝑥2 + 𝑓22 𝑑𝑥22 + 𝑓2 𝑑 2 𝑥2
The right-hand-side of the above expression is not a quadratic form. The presence of the constraint no longer
provides for a quadratic form as the second order differential of the objective function. However, we can use the
constraint function itself to transform 𝑑 2 𝑦 into a quadratic form.
Using
𝑑𝑔 = 𝑔1 𝑑𝑥1 + 𝑔2 𝑑𝑥2 = 0
Going through the same procedure as for 𝑑 2 𝑦, we find that
𝑑 2 𝑔 = 𝑑(𝑑𝑔) =
𝑑2𝑔 =
𝜕(𝑑𝑔)
𝜕(𝑑𝑔)
𝑑𝑥1 +
𝑑𝑥2
𝜕𝑥1
𝜕𝑥2
𝜕
𝜕
(𝑔 𝑑𝑥 + 𝑔2 𝑑𝑥2 )𝑑𝑥1 +
(𝑔 𝑑𝑥 + 𝑔2 𝑑𝑥2 )𝑑𝑥2
𝜕𝑥1 1 1
𝜕𝑥2 1 1
Consider the first term on the RHS:
𝜕
𝜕
𝜕
(𝑔1 𝑑𝑥1 + 𝑔2 𝑑𝑥2 )𝑑𝑥1 =
(𝑔1 𝑑𝑥1 )𝑑𝑥1 +
(𝑔 𝑑𝑥 )𝑑𝑥1
𝜕𝑥1
𝜕𝑥1
𝜕𝑥1 2 2
𝜕
𝜕𝑑𝑥2
(𝑔1 𝑑𝑥1 + 𝑔2 𝑑𝑥2 )𝑑𝑥1 = 𝑔11 𝑑𝑥12 + (𝑔21 𝑑𝑥2 + 𝑔2
) 𝑑𝑥1
𝜕𝑥1
𝜕𝑥1
Now the second term:
LN 8—Constrained Optimization
Page 7 of 38
𝜕
𝜕𝑑𝑥2
(𝑔 𝑑𝑥 + 𝑔2 𝑑𝑥2 )𝑑𝑥2 = (𝑔12 𝑑𝑥1 + 𝑔2
) 𝑑𝑥2 + 𝑔22 𝑑𝑥22
𝜕𝑥2 1 1
𝜕𝑥2
Thus, the second differential 𝑑 2 𝑔 can be written as,
𝜕𝑑𝑥2
𝜕𝑑𝑥2
𝑑 2 𝑔 = 𝑔11 𝑑𝑥12 + 2𝑔12 𝑑𝑥1 𝑑𝑥2 + 𝑔22 𝑑𝑥22 + +𝑔2 (
𝑑𝑥1 +
𝑑𝑥2 )
𝜕𝑥1
𝜕𝑥2
Note that the parenthetical expression in the second order differential can be simplified to
𝜕𝑑𝑥2
𝜕𝑑𝑥2
𝑑𝑥1 +
𝑑𝑥2 = 𝑑(𝑑𝑥2 ) = 𝑑 2 𝑥2
𝜕𝑥1
𝜕𝑥2
Therefore,
𝑑 2 𝑔 = 𝑔11 𝑑𝑥12 + 2𝑔12 𝑑𝑥1 𝑑𝑥2 + 𝑔22 𝑑𝑥22 + 𝑔2 𝑑 2 𝑥2 = 0
Solving for 𝑑 2 𝑥2 ,
𝑑 2 𝑥2 = −
𝑔11 𝑑𝑥12 + 2𝑔12 𝑑𝑥1 𝑑𝑥2 + 𝑔22 𝑑𝑥22
𝑔2
and multiplying both sides by 𝑓2 ,
𝑓2 𝑑 2 𝑥2 = −𝑓2
𝑔11 𝑑𝑥12 + 2𝑔12 𝑑𝑥1 𝑑𝑥2 + 𝑔22 𝑑𝑥22
𝑔2
and then substituting in 𝑑 2 𝑦, we have,
𝑓2
𝑓2
𝑓2
𝑔11 𝑑𝑥12 − 2 𝑔12 𝑑𝑥1 𝑑𝑥2 − 𝑔22 𝑑𝑥22
𝑔2
𝑔2
𝑔2
𝑓2
𝑓2
𝑓2
2
2
𝑑 𝑦 = (𝑓11 − 𝑔11 ) 𝑑𝑥1 + 2 (𝑓12 − 𝑔12 ) 𝑑𝑥1 𝑑𝑥2 + (𝑓22 − 𝑔22 ) 𝑑𝑥22
𝑔2
𝑔2
𝑔2
𝑑 2 𝑦 = 𝑓11 𝑑𝑥12 + 2𝑓12 𝑑𝑥1 𝑑𝑥2 + 𝑓22 𝑑𝑥22 −
Note that from the FOC for the Lagrangian function we have,
𝑍2 = 𝑓2 − 𝜆𝑔2 = 0
𝑓2
=𝜆
𝑔2
Thus,
𝑑 2 𝑦 = (𝑓11 − 𝜆𝑔11 )𝑑𝑥12 + 2(𝑓12 − 𝜆𝑔12 )𝑑𝑥1 𝑑𝑥2 + (𝑓22 − 𝜆𝑔22 )𝑑𝑥22
Also finding the second derivatives from the FOC,
𝑍11 = 𝑓11 − 𝜆𝑔11
𝑍12 = 𝑓12 − 𝜆𝑔12
𝑍22 = 𝑓22 − 𝜆𝑔2
we finally have,
𝑑 2 𝑦 = 𝑍11 𝑑𝑥12 + 2𝑍12 𝑑𝑥1 𝑑𝑥2 + 𝑍22 𝑑𝑥22
LN 8—Constrained Optimization
Page 8 of 38
which now gives us the quadratic form.
2.3. The “Bordered” Hessian Determinant for SOC
The quadratic form above allows us to determine the SOC.
𝑑 2 𝑦 = 𝑍11 𝑑𝑥12 + 2𝑍12 𝑑𝑥1 𝑑𝑥2 + 𝑍22 𝑑𝑥22
For the optimum solutions of 𝑥1 and 𝑥1 to be a maximum, 𝑑 2 𝑦 < 0, and for a minimum 𝑑 2 𝑦 > 0.
To determine the negative or positive definiteness of the quadratic form, we form the “bordered” Hessian
determinant. This is explained next.
Using the first differential of the constraint function,
𝑔1 𝑑𝑥1 + 𝑔2 𝑑𝑥2 = 0
solving for 𝑑𝑥2
𝑑𝑥2 = −
𝑔1
𝑑𝑥
𝑔2 1
and substituting in the quadratic form, we have
2
𝑔1
𝑔1
𝑑 2 𝑦 = 𝑍11 𝑑𝑥12 − 2𝑍12 𝑑𝑥1 ( 𝑑𝑥1 ) + 𝑍22 (− 𝑑𝑥1 )
𝑔2
𝑔2
2
𝑔
𝑔
1
1
𝑑 2 𝑦 = 𝑍11 𝑑𝑥12 − 2𝑍12 𝑑𝑥12 + 𝑍22 2 𝑑𝑥12
𝑔2
𝑔2
Factoring out 𝑑𝑥12 ⁄𝑔22 ,
𝑑 2 𝑦 = (𝑍11 𝑔22 − 2𝑍12 𝑔1 𝑔2 + 𝑍22 𝑔12 )
𝑑𝑥12
𝑔22
The SOC requires that the quadratic form in the parenthetical expression to be negative definite for a maximum and
positive definite for a minimum.
Take the three equations from the first order condition and rewrite them in the implicit function format, where 𝜆, 𝑥1 ,
and 𝑥2 are the endogenous variables and c is the exogenous variable.
𝜕𝑍
= 𝑐 − 𝑔(𝑥1 , 𝑥2 ) = 0
𝜕𝜆
𝜕𝑍
= 𝑓1 − 𝜆𝑔1 = 0
𝜕𝑥1
𝜕𝑍
= 𝑓2 − 𝜆𝑔2 = 0
𝜕𝑥2
→
𝐹 𝜆 (𝜆, 𝑥1 , 𝑥2 ; 𝑐) = 0
→
𝐹1 (𝜆, 𝑥1 , 𝑥2 ; 𝑐) = 0
→
𝐹 2 (𝜆, 𝑥1 , 𝑥2 ; 𝑐) = 0
To form the Jacobian determinant
LN 8—Constrained Optimization
Page 9 of 38
𝜕𝐹 𝜆
| 𝜕𝜆
𝜕𝐹1
|𝐽| =
𝜕𝜆
|𝜕𝐹 2
𝜕𝜆
𝜕𝐹 𝜆
𝜕𝑥1
𝜕𝐹1
𝜕𝑥1
𝜕𝐹 2
𝜕𝑥1
𝜕𝐹 𝜆
𝜕𝑥2 |
𝜕𝐹1
𝜕𝑥2
𝜕𝐹 2 |
𝜕𝑥2
0
|𝐽| = |−𝑔1
−𝑔2
−𝑔1
𝑓11 − 𝜆𝑔11
𝑓21 − 𝜆𝑔21
0
|𝐽| = |−𝑔1
−𝑔2
−𝑔1
𝑍11
𝑍21
−𝑔2
𝑓12 − 𝜆𝑔12 |
𝑓22 − 𝜆𝑔22
−𝑔2
𝑍12 |
𝑍22
|𝐽| = −𝑍11 𝑔22 + 2𝑍12 𝑔1 𝑔2 − 𝑍22 𝑔12 = −(𝑍11 𝑔22 − 2𝑍12 𝑔1 𝑔2 + 𝑍22 𝑔12 )
The Jacobian determinant is the negative of the quadratic form in the parenthetical expression on the RHS of 𝑑 2 𝑦
above, shown again here.
𝑑 2 𝑦 = (𝑍11 𝑔22 − 2𝑍12 𝑔1 𝑔2 + 𝑍22 𝑔12 )
𝑑𝑥12
𝑔22
The determinant expression of (𝑍11 𝑔22 − 2𝑍12 𝑔1 𝑔2 + 𝑍22 𝑔12 ) is called a bordered Hessian and is denoted by |𝐻|.
0
|𝐻| = |𝑔1
𝑔2
𝑔1
𝑍11
𝑍21
𝑔2
𝑍12 |
𝑍22
Thus,
positive definite
𝑑 2 𝑦 is {
} subject to
negative definite
𝑔1 𝑑𝑥1 + 𝑔2 𝑑𝑥2 = 0
iff
0
|𝐻| = |𝑔1
𝑔2
𝑔1
𝑍11
𝑍21
𝑔2
𝑍12 | {< 0}
>0
𝑍22
There is no mistake in typing above! For 𝑑 2 𝑦 to be positive definite, |𝐻| < 0. This is because the bordered Hessian is
formed by using the negative of the quadratic form.
Example
Use the Lagrangian-function method to find the optimum values 𝑥1 and 𝑥2 for the utility function
𝑈 = 𝑥1 𝑥2 + 2𝑥1
subject to the budget constraint 4𝑥1 + 2𝑥2 = 60. Develop the bordered Hessian determinant to determine if the
optimum values maximize the utility function.
𝑍 = 𝑥1 𝑥2 + 2𝑥1 + 𝜆(60 − 4𝑥1 − 2𝑥2 )
𝑍𝜆 = 60 − 4𝑥1 − 2𝑥2 = 0
𝑍1 = 𝑥2 + 2 − 4𝜆 = 0
𝑍2 = 𝑥1 − 2𝜆 = 0
0
[−4
−2
4
0
1
2 𝜆
60
1] [𝑥1 ] = [−2]
0 𝑥2
0
LN 8—Constrained Optimization
→
𝜆
4
[𝑥1 ] = [ 8]
𝑥2
14
Page 10 of 38
𝑔1 = 4
𝑍11 = 0
0
|𝐻| = |4
2
𝑔2 = 2
𝑍12 = 1 = 𝑍21
𝑍22 = 0
4 2
0 1| = 16 > 0
1 0
The optimum values maximize U.
Example
Use the Lagrangian-function method to find the optimum values 𝑥1 and 𝑥2 for the function 𝑦 = 4𝑥12 + 6𝑥22
subject to the constraint 2𝑥1 + 3𝑥2 = 10. Develop the bordered Hessian determinant to determine if the optimum
values yield a maximum or a minimum.
𝑍 = 4𝑥12 + 6𝑥22 + 𝜆(10 − 2𝑥1 − 3𝑥2 )
𝑍𝜆 = 10 − 2𝑥1 − 3𝑥2 = 0
𝑍1 = 8𝑥1 − 2𝜆 = 0
𝑍2 = 12𝑥2 − 3𝜆 = 0
0
[−2
−3
2
8
0
3 𝜆
10
0] [𝑥1 ] = [ 0]
12 𝑥2
0
𝑔1 = 2
𝑍11 = 8
0
|𝐻| = |𝑔1
𝑔2
→
𝑔2 = 3
𝑍12 = 0 = 𝑍21
𝑔1
𝑍11
𝑍21
𝑔2
0
𝑍12 | = |2
𝑍22
3
2
8
0
𝜆
8
[𝑥1 ] = [2]
𝑥2
2
𝑍22 = 12
3
0| = −120 < 0
12
The optimum values yield a minimum.
Example
Let the function
𝑈(𝑥1 𝑥2 ) = 𝑥1 𝑥2
represent a simple two-period utility function where 𝑥1 and 𝑥2 are consumption in period 1 and consumption in
period 2, respectively. The consumer’s budget constraint at the beginning of period 1 is
𝑥1 +
𝑥2
=𝐵
1+𝑟
The consumer is allowed to borrow or lend across the periods at the market interest rate of r. Note that the value of
expenditure in period 2 is discounted using r.
The Lagrangian function is then
𝑍 = 𝑥1 𝑥2 + 𝜆 (𝐵 − 𝑥1 −
𝑥2
)
1+𝑟
providing the following FOC:
LN 8—Constrained Optimization
Page 11 of 38
𝑍𝜆 = 𝐵 − 𝑥1 −
𝑥2
=0
1+𝑟
𝑍1 = 𝑥2 − 𝜆 = 0
𝑍2 = 𝑥1 −
𝜆
=0
1+𝑟
We can find the solutions for λ, 𝑥1 , and 𝑥2 through substitution. From the second equation,
𝑥2 = 𝜆
Substituting in the third equation,
𝑥1 =
𝑥2
1+𝑟
and then substituting for 𝑥1 in the budget constraint,
𝑥2
𝑥2
+
=𝐵
1+𝑟 1+𝑟
2𝑥2 = 𝐵(1 + 𝑟)
The solutions are then,
𝜆 = 𝑥2 =
𝐵(1 + 𝑟)
𝐵
, 𝑥1 =
2
2
Now form the bordered Hessian,
0
|𝐻| = |𝑔1
𝑔2
𝑔1
𝑍11
𝑍21
0
𝑔2
|
𝑍12 | = 1
|
1
𝑍22
1+𝑟
1
0
1
1
1+𝑟
1 || = (−1) (−
1
1
2
)+
=
>0
1+𝑟
1+𝑟 1+𝑟
0
Since |𝐻| > 0, then the SOC is satisfied for a maximum U.
2.4. n-Variable Constrained Optimization
Here the objective function contains more than two variables, subject to a constraint with the same number of
variables.
subject to
𝑦 = 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 )
𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) = 𝑐
The bordered Hessian is,
0
𝑔1
|𝐻| = || 𝑔2
⋮
𝑔𝑛
𝑔1
𝑍11
𝑍21
⋮
𝑍𝑛1
𝑔2
𝑍12
𝑍22
⋮
𝑍𝑛2
⋯ 𝑔𝑛
⋯ 𝑍1𝑛
⋯ 𝑍2𝑛 |
|
⋮
⋮
⋯ 𝑍𝑛𝑛
LN 8—Constrained Optimization
Page 12 of 38
The leading principal minors of |𝐻| are defined as
0
𝑔
|𝐻2 | ≡ | 1
𝑔2
𝑔1
𝑍11
𝑍21
𝑔2
𝑍12 |
𝑍22
0
𝑔1
|𝐻3 | ≡ |
𝑔2
𝑔3
𝑔1
𝑍11
𝑍21
𝑍31
𝑔2
𝑍12
𝑍22
𝑍32
𝑔3
𝑍13
|
𝑍23
𝑍33
⋯
|𝐻𝑛 | ≡ |𝐻|
The determinantal test for relative constrained extremum with
𝑍 = 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) + 𝜆[𝑐 − 𝑔(𝑥1 , 𝑥2 , … , 𝑥𝑛 )]
is
Condition
First-order condition
Second-order condition
Maximum
𝑍1 = 𝑍2 = ⋯ = 𝑍𝑛 = 0
|𝐻2 | > 0; |𝐻3 | < 0; |𝐻4 | > 0; ⋯ ;
(−1)𝑛 |𝐻4 | > 0
Minimum
𝑍1 = 𝑍2 = ⋯ = 𝑍𝑛 = 0
|𝐻2 |, |𝐻3 |, ⋯ , |𝐻4 | < 0
3. Utility Maximization and Consumer Demand
Maximize
𝑈 = 𝑈(𝑥1 , 𝑥2 )
subject to the budget constraint
𝐵 = 𝑥1 𝑃1 + 𝑥2 𝑃2
3.1. First-Order Condition
Form the Lagrangian function
𝑍 = 𝑈(𝑥1 , 𝑥2 ) + 𝜆(𝐵 − 𝑥1 𝑃1 − 𝑥2 𝑃2 )
and obtain the set of simultaneous equations
𝑍𝜆 = 𝐵 − 𝑥1 𝑃1 − 𝑥2 𝑃2 = 0
𝑍1 = 𝑈1 − 𝜆𝑃1 = 0
𝑍2 = 𝑈2 − 𝜆𝑃2 = 0
From the last two equations we have the familiar utility maximization principle.
𝑈1 𝑈2
=
=𝜆
𝑃1 𝑃2
This implies that the limited budget be allocated between the two goods such that marginal utility per dollar of 𝑥1 be
equal to the marginal utility per dollar of 𝑥2 . Furthermore the ratio of marginal utility to price for the two goods be
equal to λ. It was shown that λ shows the sensitivity of the optimum value of the objective function with respect to
changes in the constraint parameter.
LN 8—Constrained Optimization
Page 13 of 38
𝜕𝑈
=𝜆
𝜕𝐵
Here we can interpret λ as the marginal utility of the budget money.
We can write the utility maximization condition 𝑈1 ⁄𝑃1 = 𝑈2 ⁄𝑃2 as
𝑈1 𝑃1
=
𝑈2 𝑃2
To interpret this last expression of the relationship between marginal utilities and prices, let’s consider the concept of
the indifference curve.
3.1.1. The Indifference Curve Analysis
The indifference curve represents the locus of various combinations of the quantities of 𝑥1 and 𝑥2 which yield the
same level of utility. Mathematically, this constant level of utility is expressed by setting the total differential of the
utility function 𝑈 = 𝑈(𝑥1 , 𝑥2 ) equal to zero.
𝑑𝑈 = 𝑈1 𝑑𝑥1 + 𝑈2 𝑑𝑥2 = 0
from which we obtain,
𝑑𝑥2
𝑈1
=−
𝑑𝑥1
𝑈2
To maintain the same level of utility any decrease (increase) in the quantity of one good must be compensated by an
increase (a decrease) in the quantity of the other good. These substitutions take place at the margin. Thus, the rate at
which the quantity of one good is substituted or exchanged for the quantity of the other, 𝑑𝑥2 ⁄𝑑𝑥1 , is called the
marginal rate of substitution. Along the indifference curve (Figure 1) the marginal rate of substitution, which also
represents the slope at any point on the indifference curve, is equal to the (negative of) the ratio of marginal utilities.
Figure 1
x₂
𝑑𝑥2
𝑈1
=−
𝑑𝑥1
𝑈2
x₂¹
A
B
x₂²
I₁
x₁¹
LN 8—Constrained Optimization
x₁²
x₁
Page 14 of 38
The indifference curve represents a given level of utility, to maintain which the consumer must engage in the
substitution activity. What if the consumer is able to have more of 𝑥2 without giving up any of 𝑥2 , or have more of
both? Clearly, a consumer is not confined to just one level of utility. More of either one or both goods would raise the
level of utility, moving the consumer to a higher indifference curve; a curve further away from the origin. Figure 2
shows the a segment of the consumer’s indifference map consisting of three indifference curves.
Figure 2
x₂
I₃
I₂
I₁
x₁
3.1.1.1.1.
How to Plot Indifference Curves
One way to plot indifference curves using an specific utility function is to use the Cobb-Douglas function format.
𝑢 = 𝑥1𝛼 𝑥21−𝛼
Rewrite the function, using a specified value for the utility level, 𝑢0 .
1
𝑢0 1−𝛼
𝑥2 = ( 𝛼 )
𝑥1
The indifference curves in Figure 2 are drawn for three different values of 𝑢0 and using 𝛼 = 0.50. By assigning
different values of 𝑥1 you can determine the values for 𝑥2 and then plot the indifference curve(s).
3.1.1.2.
Budget Constraint
Utility maximization makes sense only when the consumer encounters a budget constraint. Without the budget
constraint, there would be no optimal solutions for the quantity of the two goods. We can now superimpose the
budget constraint 𝐵 = 𝑥1 𝑃1 + 𝑥2 𝑃2 upon the indifference map. To draw the budget constraint, first we must rearrange
the terms as follows,
𝑥2 =
𝐵 𝑃1
− 𝑥
𝑃2 𝑃2 1
where 𝐵 ⁄𝑃2 is the vertical intercept, and − 𝑃1 ⁄𝑃2 = 𝑑𝑥2 ⁄𝑑𝑥1 is the slope of the budget line, as shown in Figure 3. The
same diagram shows the optimum combination of 𝑥1 and 𝑥2 at point E, where the budget line is tangent to the
indifference curve 𝐼2 , the point at which the slope of the indifference curve 𝐼2 is equal the slope of the budget line
LN 8—Constrained Optimization
Page 15 of 38
𝑑𝑥2
𝑈1
𝑃1
=−
=−
𝑑𝑥1
𝑈2
𝑃2
This is the same conclusion reached by the FOC of the constrained maximization above.
Figure 3
x₂
𝑑𝑥2
𝑈1
𝑃1
=−
=−
𝑑𝑥1
𝑈2
𝑃2
D
x₂*
E
𝑥2 =
𝐵 𝑃1
− 𝑥
𝑃2 𝑃2 1
I₃
F
x₁*
I₂
I₁
x₁
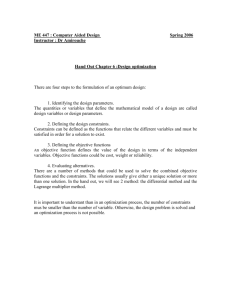
Example
Using the utility function 𝑢 = 𝑥1 𝑥2 + 2𝑥1 and the budget constraint 4𝑥1 + 2𝑥2 = 60 show the optimum quantities of 𝑥1
and 𝑥2 as the point of tangency of the indifference curve and the budget constraint.
To draw the budget line, first rewrite the budget constraints and utility function, respectively, as,
𝑥2 = 30 − 2𝑥1
𝑥2 =
𝑢 − 2𝑥1
𝑥1
The optimum quantities, as determined above, are 𝑥1∗ = 8 and 𝑥2∗ = 14, and 𝑢∗ = 128. We can draw the budget line
128−2𝑥1
𝑥2 = 30 − 2𝑥1 , and using 𝑢 = 128, we can plot the following indifference curve 𝑥2 =
together with the budget
line. The two curves will be tangent at the optimum quantities. (Figure 4).
LN 8—Constrained Optimization
𝑥1
Page 16 of 38
Figure 4
x₂
𝑥2 =
128 − 2𝑥1
𝑥1
14
E
𝑑𝑥2
= −2
𝑑𝑥1
x₂ = 30 − 2x₁
8
x₁
3.2. Second-Order Condition
For the SOC to hold—for the stationary values to be a maximum—the bordered Hessian |𝐻| must be positive.
0
|𝐻| = |𝑔1
𝑔2
𝑔1
𝑍11
𝑍21
𝑔2
0
𝑍12 | = |𝑃1
𝑍22
𝑃2
𝑃1
𝑈11
𝑈21
𝑃2
𝑈12 | = 2𝑃1 𝑃2 𝑈12 − 𝑃22 𝑈11 − 𝑃12 𝑈22 > 0
𝑈22
The presence of 𝑈11 , 𝑈22 , and 𝑈12 in the bordered Hessian determinant indicates that the condition |𝐻| > 0 requires
certain restrictions on the utility function and, hence, on the indifference curves. This requires that the second
derivative of the indifference curve be positive, that is, the indifference curve be strictly convex.
𝑑 2 𝑥2
>0
𝑑𝑥12
How do we obtain an expression for 𝑑 2 𝑥2 ⁄𝑑𝑥12 ? Let’s start with
𝑑𝑥2
𝑈1
=−
𝑑𝑥1
𝑈2
Differentiate the right-hand-side with respect to 𝑥1 .
𝑑 2 𝑥2
𝑑
𝑈1
1
𝑑𝑈1
𝑑𝑈2
2 = 𝑑𝑥 (− 𝑈 ) = − 2 (𝑈2 𝑑𝑥 − 𝑈1 𝑑𝑥 )
𝑑𝑥1
𝑈2
1
2
1
1
The terms
𝑑𝑈1
𝑑𝑥1
and
𝑑𝑈2
𝑑𝑥1
in the right-hand-side parenthesis require further adjustments. Along the indifference curve
the change in marginal utility is affected by the marginal rate of substitution 𝑑𝑥2 ⁄𝑑𝑥1 .
𝑑𝑈1
𝑑𝑥2
𝑃1
= 𝑈11 + 𝑈12
= 𝑈11 − 𝑈12
𝑑𝑥1
𝑑𝑥1
𝑃2
LN 8—Constrained Optimization
Page 17 of 38
𝑑𝑈2
𝑑𝑥2
𝑃1
= 𝑈21 + 𝑈22
= 𝑈21 − 𝑈22
𝑑𝑥1
𝑑𝑥1
𝑃2
Thus,
𝑑 2 𝑥2
1
𝑑𝑈1
𝑑𝑈2
1
𝑃1
𝑃1
= − 2 (𝑈2
− 𝑈1
) = − 2 [𝑈2 (𝑈11 − 𝑈12 ) − 𝑈1 (𝑈21 − 𝑈22 )]
𝑑𝑥1
𝑑𝑥1
𝑃2
𝑃2
𝑑𝑥12
𝑈2
𝑈2
𝑑 2 𝑥2
1
𝑃1
𝑃1
𝑃1
2 = − 2 [𝑈2 (𝑈11 − 𝑈12 𝑃 ) − 𝑈2 𝑃 (𝑈21 − 𝑈22 𝑃 )]
𝑑𝑥1
𝑈2
2
2
2
𝑑 2 𝑥2
1
(2𝑃1 𝑃2 𝑈12 − 𝑃22 𝑈11 − 𝑃12 𝑈22 )
2 =
𝑑𝑥1
𝑈2 𝑃22
We can finally write,
𝑑 2 𝑥2
|𝐻|
=
>0
𝑑𝑥12
𝑈2 𝑃22
When the second order condition |𝐻| > 0 is satisfied, then 𝑑 2 𝑥2 ⁄𝑑𝑥12 > 0, and the relevant indifference curve is
strictly convex at the point of tangency.
3.3. Comparative-Static Analysis
The term comparative-static analysis in economics simply means the comparison of two stationary conditions. How
do we move from an initial equilibrium to a new equilibrium when the system is disturbed by a change in an
exogenous variable?
In the consumer constrained utility maximization model the exogenous variables are the prices of the goods and
consumers initial endowment (the budget). In this model the consumer’s equilibrium condition, where the limited
budget is allocated among 𝑥1 and 𝑥2 such that utility is maximized. The equilibrium was obtained by using the
Lagrangian function
𝑍 = 𝑈(𝑥1 , 𝑥2 ) + 𝜆(𝐵 − 𝑥1 𝑃1 − 𝑥2 𝑃2 )
and determining the first order condition. The first order condition can be represented by the following implicit
functions, where λ, 𝑥1 , and 𝑥2 are the endogenous variables, and 𝑃1 , 𝑃2 , and B are the exogenous variables.
𝐹 𝜆 (𝜆, 𝑥1 , 𝑥2 ; 𝐵, 𝑃1 , 𝑃2 ) = 0
𝐹1 (𝜆, 𝑥1 , 𝑥2 ; 𝐵, 𝑃1 , 𝑃2 ) = 0
𝐹 2 (𝜆, 𝑥1 , 𝑥2 ; 𝐵, 𝑃1 , 𝑃2 ) = 0
→
→
→
𝐵 − 𝑥1 𝑃1 − 𝑥2 𝑃2 = 0
𝑈1 − 𝜆𝑃1 = 0
𝑈2 − 𝜆𝑃2 = 0
Using the implicit functions and simultaneous equations we studied previously, now we can perform the comparative
static analysis. To develop the framework to analyze the impact of changes in 𝑃1 , 𝑃2 , and B on the equilibrium 𝑥1 and
𝑥2 first take the total differentials of the FOC equations above.
LN 8—Constrained Optimization
Page 18 of 38
𝜕𝐹 𝜆
𝜕𝐹 𝜆
𝜕𝐹 𝜆
𝜕𝐹 𝜆
𝜕𝐹 𝜆
𝜕𝐹 𝜆
𝑑𝜆 +
𝑑𝑥1 +
𝑑𝑥2 = −
𝑑𝑃1 −
𝑑𝑃2 −
𝑑𝐵
𝜕𝜆
𝜕𝑥1
𝜕𝑥2
𝜕𝑃1
𝜕𝑃2
𝜕𝐵
𝜕𝐹1
𝜕𝐹1
𝜕𝐹1
𝜕𝐹1
𝜕𝐹1
𝜕𝐹1
𝑑𝜆 +
𝑑𝑥1 +
𝑑𝑥2 = −
𝑑𝑃1 −
𝑑𝑃2 −
𝑑𝐵
𝜕𝜆
𝜕𝑥1
𝜕𝑥2
𝜕𝑃1
𝜕𝑃2
𝜕𝐵
𝜕𝐹 2
𝜕𝐹 2
𝜕𝐹 2
𝜕𝐹 2
𝜕𝐹 2
𝜕𝐹 2
𝑑𝜆 +
𝑑𝑥1 +
𝑑𝑥2 = −
𝑑𝑃1 −
𝑑𝑃2 −
𝑑𝐵
𝜕𝜆
𝜕𝑥1
𝜕𝑥2
𝜕𝑃1
𝜕𝑃2
𝜕𝐵
Note that all the derivatives with respect to the endogenous variables are on the left-hand-side and those with respect
the exogenous variables appear on the right-hand-side. Applying that pattern to the derivatives of the FOC, we have
−𝑃1 𝑑𝜆 − 𝑃1 𝑑𝑥1 − 𝑃2 𝑑𝑥2 = 𝑥1 𝑑𝑃1 + 𝑥2 𝑑𝑃2 − 𝑑𝐵
−𝑃1 𝑑𝜆 + 𝑈11 𝑑𝑥1 − 𝑈12 𝑑𝑥2 = 𝜆 𝑑𝑃1
−𝑃2 𝑑𝜆 + 𝑈21 𝑑𝑥1 − 𝑈22 𝑑𝑥2 = 𝑥1 𝑑 + 𝜆 𝑑𝑃2
3.3.1.
Impact of a change in income (budget), with 𝒅𝑷𝟏 = 𝒅𝑷𝟐 = 𝟎
Dividing the terms of total differentials above by 𝜕𝐵 and rearranging in the matrix format, we have
𝜕𝐹 𝜆
𝜕𝜆
𝜕𝐹1
𝜕𝜆
𝜕𝐹 2
[ 𝜕𝜆
𝜕𝐹 𝜆
𝜕𝑥1
𝜕𝐹1
𝜕𝑥1
𝜕𝐹 2
𝜕𝑥1
𝜕𝐹 𝜆 𝜕𝜆
𝜕𝐹 𝜆
−
𝜕𝑥2 𝜕𝐵
𝜕𝐵
𝜕𝐹1 𝜕𝑥1
𝜕𝐹1
= −
𝜕𝑥2 𝜕𝐵
𝜕𝐵
𝜕𝐹 2
𝜕𝐹 2 𝜕𝑥2
−
𝜕𝑥2 ] [ 𝜕𝐵 ] [ 𝜕𝐵 ]
→
0
[−𝑃1
−𝑃2
−𝑃1
𝑈11
𝑈21
𝜕𝜆
𝜕𝐵
−𝑃2
−1
𝜕𝑥1
𝑈12 ]
= [ 0]
𝑈22 𝜕𝐵
0
𝜕𝑥2
[ 𝜕𝐵 ]
Now recall that
0
|𝐽| = |−𝑃1
−𝑃2
−𝑃1
𝑈11
𝑈21
−𝑃2
𝑈12 |
𝑈22
Solving for 𝜕𝑥1 ⁄𝜕𝐵 and 𝜕𝑥2 ⁄𝜕𝐵
𝜕𝑥1
1 0
= |−𝑃1
𝜕𝐵 |𝐽| −𝑃
2
−1
0
0
𝜕𝑥2
1 0
= |−𝑃1
|𝐽|
𝜕𝐵
−𝑃2
−𝑃1
𝑈11
𝑈21
−𝑃2
1 −𝑃
𝑈12 | = | 1
|𝐽| −𝑃2
𝑈22
𝑃2 𝑈12 − 𝑃1 𝑈22
𝑈12
|=
𝑈22
|𝐽|
−1
−1 −𝑃1
0 |=
|
|𝐽| −𝑃2
0
𝑃1 𝑈12 − 𝑃2 𝑈11
𝑈11
|=
𝑈21
|𝐽|
The signs of the above two comparative static derivatives cannot be determined without additional information about
the relative magnitude of terms in the numerator. However, a positive change would indicate that it is a normal good
(Figure 4-a), but a negative change in equilibrium quantity of either good due to an increase in budget would imply
the good is an inferior good and a (Figure 4-b).
LN 8—Constrained Optimization
Page 19 of 38
Figure 4
(a)
Normal Good
x₂
(b)
Inferior Good
x₂
x₂*
x₂*
E₂
E₂
x₂
I₂
E₁
x₂
I₂
E₁
I₁
x₁
x₁ x₁*
3.3.2.
I₁
x₁* x₁
x₁
Impact of a change in 𝑷𝟏 , with 𝒅𝑷𝟐 = 𝒅𝑩 = 𝟎
Dividing the terms of total differentials above by 𝜕𝑃1 and rearranging in the matrix format, we have
𝜕𝐹 𝜆
𝜕𝜆
𝜕𝐹1
𝜕𝜆
𝜕𝐹 2
[ 𝜕𝜆
𝜕𝐹 𝜆
𝜕𝑥1
𝜕𝐹1
𝜕𝑥1
𝜕𝐹 2
𝜕𝑥1
𝜕𝐹 𝜆 𝜕𝜆
𝜕𝐹 𝜆
−
𝜕𝑥2 𝜕𝑃1
𝜕𝑃1
𝜕𝐹1 𝜕𝑥1
𝜕𝐹1
= −
𝜕𝑥2 𝜕𝑃1
𝜕𝑃1
𝜕𝐹 2 𝜕𝑥2
𝜕𝐹 2
−
𝜕𝑥2 ] [𝜕𝑃1 ] [ 𝜕𝑃1 ]
𝜕𝑥1
1 0
= |−𝑃1
𝜕𝑃1 |𝐽| −𝑃
2
𝜕𝑥1 −𝑥1 −𝑃1
=
|
|𝐽| −𝑃2
𝜕𝑃1
𝑥1
𝜆
0
→
0
[−𝑃1
−𝑃2
−𝑃1
𝑈11
𝑈21
𝜕𝜆
𝜕𝑃1
𝑥1
−𝑃2 𝜕𝑥
1
𝑈12 ]
= [ 𝜆]
𝑈22 𝜕𝑃1
0
𝜕𝑥2
[𝜕𝑃1 ]
−𝑃2
𝑈12 |
𝑈22
−𝑃2 −𝑃1
𝑈12
|+
|
𝑈22
|𝐽| −𝑃2
𝜆
|
0
𝜕𝑥1 −𝑥1 (𝑃2 𝑈12 − 𝑃1 𝑈22 ) −𝜆𝑃22
=
+
|𝐽|
|𝐽|
𝜕𝑃1
For further elucidation of the impact of the change in 𝑃1 , let’s denote the terms on the right-hand side by 𝑇1 and 𝑇2 ,
respectively. Thus
𝜕𝑥1
= 𝑇1 + 𝑇2
𝜕𝑃1
First, let’s attend to 𝑇1 .
𝑇1 =
−𝑥1 (𝑃2 𝑈12 − 𝑃1 𝑈22 )
|𝐽|
LN 8—Constrained Optimization
Page 20 of 38
In the analysis of the impact of a change in the budget we saw that
𝜕𝑥1 𝑃2 𝑈12 − 𝑃1 𝑈22
=
|𝐽|
𝜕𝐵
Substituting this in 𝑇1 we have
𝜕𝑥1
𝑇1 = − (
)𝑥
𝜕𝐵 1
Furthermore, holding 𝑃2 unchanged in the budget constraint 𝐵 = 𝑥1 𝑃1 + 𝑥2 𝑃2 , then
𝜕𝐵
= 𝑥1
𝜕𝑃1
Substituting for 𝑥1 ,
𝜕𝑥1 𝜕𝐵
𝑇1 = − (
)
𝜕𝐵 𝜕𝑃1
Therefore, 𝑇1 shows the impact of a change in 𝑃1 on the equilibrium quantity of 𝑥1 via the budget constraint. This is
the income effect of the change in 𝑃1 .
What about 𝑇2 ? To explain, consider the first equation in the system of equations formed by the total differential of
the FOC terms.
−𝑃1 𝑑𝑥1 − 𝑃2 𝑑𝑥2 = 𝑥1 𝑑𝑃1 + 𝑥2 𝑑𝑃2 − 𝑑𝐵
Here the terms 𝑥2 𝑑𝑃2 and 𝑑𝐵 on the right-hand-side are both equal to zero because we are holding 𝑃2 and B constant
to observe the impact of a change in 𝑃1 . With respect to the remaining term on the right-hand-side, 𝑥1 𝑑𝑃1 represents
the effective loss in income due to the higher price. If we compensate the consumer for the effective income loss due
to the higher 𝑃1 such that the consumer remains at the same utility level (the same indifference) curve, then 𝑥1 𝑑𝑃1 = 0.
Our system of equations then becomes
−𝑃1 𝑑𝜆 − 𝑃1 𝑑𝑥1 − 𝑃2 𝑑𝑥2 = 0
−𝑃1 𝑑𝜆 + 𝑈11 𝑑𝑥1 − 𝑈12 𝑑𝑥2 = 𝜆 𝑑𝑃1
−𝑃2 𝑑𝜆 + 𝑈21 𝑑𝑥1 − 𝑈22 𝑑𝑥2 = 𝑥1 𝑑 + 𝜆 𝑑𝑃2
Again, dividing the terms of total differentials by 𝜕𝑃1 and rearranging in the matrix format, we have
0
[−𝑃1
−𝑃2
−𝑃1
𝑈11
𝑈21
𝜕𝜆
𝜕𝑃1
−𝑃2 𝜕𝑥
0
1
𝑈12 ]
= [ 𝜆]
𝑈22 𝜕𝑃1
0
𝜕𝑥2
[𝜕𝑃1 ]
Solving for the compensated version of 𝜕𝑥1 ⁄𝜕𝑃1 , we have
𝜕𝑥1
1 0
(
)
= |−𝑃1
𝜕𝑃1 𝑐𝑜𝑚𝑝𝑒𝑛𝑠𝑎𝑡𝑒𝑑 |𝐽| −𝑃
2
LN 8—Constrained Optimization
0
𝜆
0
−𝑃2
−𝜆𝑃22
𝑈12 | =
= 𝑇2
|𝐽|
𝑈22
Page 21 of 38
Since, due to compensation, the change in 𝑥1 is purely due the impact of the price, 𝑇2 then represents the substitution
effect of the price change. In short,
𝜕𝑥1
𝜕𝑥1 𝜕𝐵
𝜕𝑥1
= (
)
+(
)
𝜕𝑃1
𝜕𝐵 𝜕𝑃1
𝜕𝑃1 𝑐𝑜𝑚𝑝𝑒𝑛𝑠𝑎𝑡𝑒𝑑
𝜕𝑥1
= 𝑖𝑛𝑐𝑜𝑚𝑒 𝑒𝑓𝑓𝑒𝑐𝑡 + 𝑠𝑢𝑏𝑠𝑡𝑖𝑡𝑢𝑡𝑖𝑜𝑛 𝑒𝑓𝑓𝑒𝑐𝑡
𝜕𝑃1
Thus, the impact of an increase in 𝑃1 on the quantity of good 1 consumed consists of the income effect and the
substitution effect. This is the so-called Slutsky equation
Figure 5 shows the impact of a decrease in 𝑃1 on the equilibrium 𝑥1 . The initial equilibrium is established at point 𝐸1
on the indifference curve 𝐼1 , where the budget line is tangent to that indifference curve. A fall in the price 𝑃1 causes the
budget line to rotate rightward. The consumer now consumes more of good 1 (and less of good 2), moving to the
higher indifference curve 𝐼2 . The new equilibrium is established at 𝐸2 , with 𝑥1∗ amount of good 1 consumed. The two
components of the move from 𝐸1 to 𝐸2 is shown in the diagram, with 𝑇2 = (𝜕𝑥1 ⁄𝜕𝑃1 )𝑐𝑜𝑚𝑝𝑒𝑛𝑠𝑎𝑡𝑒𝑑 (the substitution
effect) shown as the move from 𝐸1 to 𝐸 𝑆 . Here the consumer is “compensated” for the price-induced gain in effective
income, to maintain the same utility level. On the horizontal axis the substitution effect is shown as the increase from
𝑥1 to 𝑥1𝑆 . The income effect is shown as the move from 𝐸 𝑆 to 𝐸2 , and on the horizontal axis as the increase from 𝑥1𝑆 to
𝑥1∗ .
Figure 5
x₂
x₂
E₁
x₂*
x₂S
E₂
ES
I₁
x₁
x₁S
I₂
x₁*
x₁
4. Homogeneous Functions
A function is said to be homogenous of degree 𝑟, if multiplying each of its independent variables by a constant 𝑐
changes the value of the function by the proportion 𝑐 𝑟 .
For 𝑟 = 0
For 𝑟 = 1
For 𝑟 = 2
For 𝑟 ⋮ 2
𝑓(𝑐𝑥1 , 𝑐𝑥2 , … , 𝑐𝑥𝑛 ) = 𝑐 0 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 ) = 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 )
𝑓(𝑐𝑥1 , 𝑐𝑥2 , … , 𝑐𝑥𝑛 ) = 𝑐𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 )
𝑓(𝑐𝑥1 , 𝑐𝑥2 , … , 𝑐𝑥𝑛 ) = 𝑐 2 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 )
𝑓(𝑐𝑥1 , 𝑐𝑥2 , … , 𝑐𝑥𝑛 ) ⋮ 𝑐 2 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 )
LN 8—Constrained Optimization
Homogeneous of degree zero
Homogeneous of degree one
Homogeneous of degree two
𝐻𝑜𝑚𝑜𝑔𝑒𝑛𝑒𝑜𝑢𝑠 ⋮ 𝑑𝑒𝑔𝑟𝑒𝑒 𝑡𝑤𝑜
Page 22 of 38
𝑓(𝑐𝑥1 , 𝑐𝑥2 , … , 𝑐𝑥𝑛 ) = 𝑐 𝑘 𝑓(𝑥1 , 𝑥2 , … , 𝑥𝑛 )
For 𝑟 = 𝑘
Homogeneous of degree 𝑘
Example
Consider
𝑓(𝑥1 , 𝑥2 , 𝑥3 ) =
𝑓(𝑐𝑥1 , 𝑐𝑥2 , 𝑐𝑥3 ) =
𝑥1 2𝑥3
+
𝑥2 3𝑥1
(𝑐𝑥1 ) 2(𝑐𝑥3 ) 𝑥1 2𝑥3
+
= +
= 𝑐 0 𝑓(𝑥1 , 𝑥2 , 𝑥3 )
(𝑐𝑥2 ) 3(𝑐𝑥1 ) 𝑥2 3𝑥1
Homogeneous of degree zero.
Example
Consider
𝑓(𝑥1 , 𝑥2 , 𝑥3 ) =
𝑓(𝑐𝑥1 , 𝑐𝑥2 , 𝑐𝑥3 ) =
Example
Consider
𝑥12 2𝑥32
+
𝑥2
𝑥1
(𝑐𝑥1 )2 2(𝑐𝑥3 )2 𝑐𝑥12 2𝑐𝑥32
𝑥12 2𝑥32
+
=
+
= 𝑐( +
) = 𝑐𝑓(𝑥1 , 𝑥2 , 𝑥3 )
(𝑐𝑥2 )
3(𝑐𝑥1 )
𝑥2
3𝑥1
𝑥2 3𝑥1
Homogeneous of degree one.
𝑓(𝑥1 , 𝑥2 , 𝑥3 ) = 2𝑥12 + 3𝑥2 𝑥3 − 𝑥32
𝑓(𝑐𝑥1 , 𝑐𝑥2 , 𝑐𝑥3 ) = 2(𝑐𝑥1 )2 + 3(𝑐𝑥2 )(𝑐𝑥3 ) − (𝑐𝑥3 )2 = 𝑐 2 (2𝑥12 + 3𝑥2 𝑥3 − 𝑥32 ) = 𝑐 2 𝑓(𝑥1 , 𝑥2 , 𝑥3 )
𝐻𝑂𝐷 2
4.1. Linearly Homogenous Production Functions
A production function is linearly homogenous (homogenous of degree one) if increasing all inputs c-fold would raise
the output also c-fold.
𝑄 = 𝑓(𝐾, 𝐿)
𝑓(𝑐𝐾, 𝑐𝐿) = 𝑐𝑓(𝐾, 𝐿) = 𝑐𝑄
This property is also known as the constant returns to scale
4.1.1. Properties of Linearly Homogenous Production Functions
Property I
If 𝑄 = 𝑓(𝐾, 𝐿) is homogenous of degree one, then the 𝐴𝑃𝑃𝐿 and 𝐴𝑃𝑃𝐾 each can be expressed as a function of 𝑘 ≡ 𝐾 ⁄𝐿
ratio alone.
Given that 𝑓(𝑐𝐾, 𝑐𝐿) = 𝑐𝑓(𝐾, 𝐿) = 𝑐𝑄, multiply the independent variables by 𝑐 = 1⁄𝐿. Thus,
𝑄
𝐾 𝐿
= 𝑓 ( , ) = 𝑓(𝑘, 1) = φ(𝑘)
𝐿
𝐿 𝐿
By definition, 𝐴𝑃𝑃𝐿 = 𝑄 ⁄𝐿 . Therefore,
𝐴𝑃𝑃𝐿 = φ(𝑘)
Also, 𝐴𝑃𝑃𝐾 = 𝑄 ⁄𝐾 . Multiply the right-hand-side by 𝐿⁄𝐿,
𝐴𝑃𝑃𝐾 =
𝑄𝐿
1 φ(𝑘)
= φ(𝑘) =
𝐿𝐾
𝑘
𝑘
LN 8—Constrained Optimization
Page 23 of 38
Since 𝐴𝑃𝑃𝐿 and 𝐴𝑃𝑃𝐾 are both function of the 𝐾 ⁄𝐿 ratio, as long as this ratio is maintained at any input level,
increasing the amount of inputs will leave both average products unchanged. This means that both average product
functions are homogenous of degree zero. If average products are constant at any input (and output) level, then
average cost functions will also remain constant at any output level. Thus, instead of the U-shaped average cost
curves, we have the horizontal line. This is exactly the meaning of constant returns to scale.
Property II
If 𝑄 = 𝑓(𝐾, 𝐿) is homogenous of degree one, then the 𝑀𝑃𝑃𝐿 and 𝑀𝑃𝑃𝐾 each can be expressed as a function of 𝑘 ≡ 𝐾 ⁄𝐿
ratio alone.
It was shown above that 𝑄 ⁄𝐿 = φ(𝑘). Thus,
𝑄 = 𝐿φ(𝑘)
𝑀𝑃𝑃𝑘 =
𝜕𝑄
𝜕
𝜕
𝐾
[𝐿φ(𝑘)] =
=
[𝐿φ ( )]
𝜕𝐾 𝜕𝐾
𝜕𝐾
𝐿
1
𝑀𝑃𝑃𝑘 = 𝐿 ( ) 𝜑 ′ (𝑘) = 𝜑 ′ (𝑘)
𝐿
And,
𝑀𝑃𝑃𝐿 =
𝜕𝑄
𝜕
[𝐿φ(𝑘)]
=
𝜕𝐿 𝜕𝐿
𝜕𝑄
𝜕φ(𝑘)
= φ(𝑘) + 𝐿
𝜕𝐿
𝜕𝐿
𝜕𝑄
𝑑φ(𝑘) 𝜕𝑘
𝑀𝑃𝑃𝐿 =
= φ(𝑘) + 𝐿
𝜕𝐿
𝑑𝑘 𝜕𝐿
𝑀𝑃𝑃𝐿 =
using the product rule
using the chain rule
Since 𝑘 = 𝐾 ⁄𝐿, then
𝜕𝑘
𝐾
=− 2
𝜕𝐿
𝐿
𝑀𝑃𝑃𝐿 =
𝜕𝑄
𝐾
= φ(𝑘) + 𝐿𝜑 ′ (𝑘) (− 2 )
𝜕𝐿
𝐿
𝑀𝑃𝑃𝐿 =
𝜕𝑄
= φ(𝑘) − 𝑘𝜑 ′ (𝑘)
𝜕𝐿
Property III (Euler’s Theorem)
If 𝑄 = 𝑓(𝐾, 𝐿) is homogenous of degree one, then
𝐾
𝜕𝑄
𝜕𝑄
+𝐿
≡𝑄
𝜕𝐾
𝜕𝐿
To prove this, using the results of Property II,
𝐾
𝜕𝑄
𝜕𝑄
+𝐿
= 𝐾𝜑 ′ (𝑘) + 𝐿[φ(𝑘) − 𝑘𝜑 ′ (𝑘)]
𝜕𝐾
𝜕𝐿
𝐾
𝜕𝑄
𝜕𝑄
+𝐿
= 𝐾𝜑 ′ (𝑘) + 𝐿φ(𝑘) − 𝐿𝑘𝜑 ′ (𝑘) = 𝐾𝜑 ′ (𝑘) + 𝐿φ(𝑘) − 𝐾𝜑 ′ (𝑘)
𝜕𝐾
𝜕𝐿
LN 8—Constrained Optimization
Page 24 of 38
𝐾
𝜕𝑄
𝜕𝑄
+𝐿
= 𝐿φ(𝑘) = 𝑄
𝜕𝐾
𝜕𝐿
Since this result is valid for any values of K and L, we can write this property as an identical equality. In economic
terms, this property of linearly homogenous production functions (with constant returns to scale) implies that the
total product is distributed among the factor inputs according to the marginal productivity of each input. That is, if
each factor input is paid the amount of its marginal product, the total product will be exactly exhausted by the
distributive shares for all factor inputs.
4.2. Cobb-Douglas Production Function
The CDPF is generally represented as
𝑄 = 𝐴𝐾 𝛼 𝐿1−𝛼
where 𝐴 > 0 and 0 < 𝛼 < 1.
A generalized version of the CDPF is
𝑄 = 𝐴𝐾 𝛼 𝐿𝛽
where 0 < 𝛽 < 1, but is not necessarily equal to 1 − 𝛼.
4.2.1. Features of 𝑸 = 𝑨𝑲𝜶 𝑳𝜷
4.2.1.1.
Homogenous of Degree (𝛂 + 𝜷)
𝐴(𝑐𝐾)𝛼 (𝑐𝐿)𝛽 = 𝑐 𝛼+𝛽 (𝐴𝐾 𝛼 𝐿𝛽 ) = 𝑐 𝛼+𝛽 𝑄
If 𝛼 + 𝛽 = 1, then 𝐴(𝑐𝐾)𝛼 (𝑐𝐿)𝛽 = 𝑐(𝐴𝐾 𝛼 𝐿𝛽 ) = 𝑐𝑄. The production function is HOD1, and there will be constant
returns to scale.
4.2.1.2.
Isoquants Have Negative Slopes
An isoquant, similar to the indifference curve, is the locus of various combinations of factor inputs that yield the same
output. Figure 6 shows three of such isoquants each showing a different output level.
LN 8—Constrained Optimization
Page 25 of 38
Figure 6
For any output level 𝑄0 , the production function can be written as
𝐴𝐾 𝛼 𝐿𝛽 = 𝑄0
𝐴𝐾 𝛼 𝐿𝛽 − 𝑄0 = 0
Taking the natural log,
ln 𝐴 + 𝛼 ln 𝐾 + 𝛽 ln 𝐿 − ln 𝑄0 = 0
This is an implicit function which defines 𝐾as a function of 𝐿.
𝐹(𝐾, 𝐿) = 0
Taking the total derivative of the implicit function, we have
𝜕𝐹
𝜕𝐹
𝑑𝐾 +
𝑑𝐿 = 0
𝜕𝐾
𝜕𝐿
𝛼
𝛽
𝑑𝐾 + 𝑑𝐿 = 0
𝐾
𝐿
which yields,
𝑑𝐾
𝛽𝐾
=−
<0
𝑑𝐿
𝛼𝐿
(𝛼, 𝛽, 𝐾, 𝐿 > 0)
4.2.1.3.
Isoquants are Strictly Convex
For the isoquant to be strictly convex,
𝑑2𝐾
>0
𝑑𝐿2
LN 8—Constrained Optimization
Page 26 of 38
𝑑2𝐾
𝑑
𝛽𝐾
𝛽 𝑑 𝐾
𝛽1
𝑑𝐾
=
(−
)=−
( ) = − 2 (𝐿
− 𝐾) > 0
𝑑𝐿2 𝑑𝐿
𝛼𝐿
𝛼 𝑑𝐿 𝐿
𝛼𝐿
𝑑𝐿
since (𝐿
𝑑𝐾
− 𝐾) < 0
𝑑𝐿
4.2.2. Properties of HOD1 Cobb-Douglas Production Function
Property I
If 𝑄 = 𝑓(𝐾, 𝐿) is homogenous of degree one, then the 𝐴𝑃𝑃𝐿 and 𝐴𝑃𝑃𝐾 each can be expressed as a function of 𝑘 ≡ 𝐾 ⁄𝐿
ratio alone.
We can write the CDPF as
𝑄 = 𝐴𝐾 𝛼 𝐿1−𝛼 = 𝐴𝐾 𝛼
𝐿
𝐾 𝛼
=
𝐴
(
) 𝐿 = 𝐿𝐴𝑘 𝛼
𝐿𝛼
𝐿
𝐴𝑃𝑃𝐿 =
𝑄
= 𝐴𝑘 𝛼
𝐿
𝐴𝑃𝑃𝐾 =
𝑄 𝑄𝐿
1
=
= 𝐴𝑘 𝛼 = 𝐴𝑘 𝛼−1
𝐾 𝐿𝐾
𝑘
Property II
If 𝑄 = 𝑓(𝐾, 𝐿) is homogenous of degree one, then the 𝑀𝑃𝑃𝐿 and 𝑀𝑃𝑃𝐾 each can be expressed as a function of 𝑘 ≡ 𝐾 ⁄𝐿
ratio alone.
𝑄 = 𝐴𝐾 𝛼 𝐿1−𝛼
𝑀𝑃𝑃𝐿 =
𝜕𝑄
𝐾 𝛼
= 𝐴𝐾 𝛼 (1 − 𝛼)𝐿−𝛼 = 𝐴(1 − 𝛼) ( ) = 𝐴(1 − 𝛼)𝑘 𝛼
𝜕𝐿
𝐿
𝑀𝑃𝑃𝐾 =
𝜕𝑄
𝐾 𝛼−1
= 𝐴𝛼𝐾 𝛼−1 𝐿−(𝛼−1) = 𝐴𝛼 ( )
= 𝐴𝛼𝑘 𝛼−1
𝜕𝐾
𝐿
Property III (Euler’s Theorem)
If 𝑄 = 𝑓(𝐾, 𝐿) is homogenous of degree one, then
𝐾
𝜕𝑄
𝜕𝑄
+𝐿
≡𝑄
𝜕𝐾
𝜕𝐿
𝜕𝑄
𝜕𝑄
+𝐿
= 𝐾𝐴𝛼𝑘 𝛼−1 + 𝐿𝐴(1 − 𝛼)𝑘 𝛼
𝜕𝐾
𝜕𝐿
𝜕𝑄
𝜕𝑄
𝐾𝛼
𝐾
+𝐿
= 𝐿𝐴𝑘 𝛼 (
+ 1 − 𝛼)
𝜕𝐾
𝜕𝐿
𝐿𝑘
𝜕𝑄
𝜕𝑄
𝐾
+𝐿
= 𝐿𝐴𝑘 𝛼 (𝛼 + 1 − 𝛼) = 𝐿𝐴𝑘 𝛼 = 𝑄
𝜕𝐾
𝜕𝐿
𝐾
4.2.3. Economic Meaning of α and 𝟏 − 𝜶 in CDPF
As shown above, per Euler’s Theorem, when the production function is homogenous of degree one the relative share
of each input from the total output is the marginal product of that input. This is, of course, true about the CobbDouglas production function. As it happens, α and 1 − 𝛼 are, respectively, the relative shares of capital (K) and labor
(L) in the CDPF.
LN 8—Constrained Optimization
Page 27 of 38
The relative share of capital is
𝐾(𝜕𝑄 ⁄𝜕𝐾 ) 𝐾(𝐴𝛼𝑘 𝛼−1 )
𝐾 1
𝑘
=
= 𝛼( ) = 𝛼 = 𝛼
𝑄
𝐿𝐴𝑘 𝛼
𝐿 𝑘
𝑘
The relative share of labor is
𝐿(𝜕𝑄 ⁄𝜕𝐿) 𝐿[𝐴(1 − 𝛼)𝑘 𝛼 ]
=
=1−𝛼
𝑄
𝐿𝐴𝑘 𝛼
Also, writing the relative share of K slightly differently, it can be seen that this relative share is also the elasticity of
output with respect to K
𝛼=
𝜕𝑄 ⁄𝜕𝐾 𝜕𝑄 𝐾
=
= 𝜀𝑄𝐾
𝑄 ⁄𝐾
𝜕𝐾 𝑄
Similarly
1−𝛼 =
𝜕𝑄 ⁄𝜕𝐿 𝜕𝑄 𝐿
=
= 𝜀𝑄𝐿
𝑄 ⁄𝐿
𝜕𝐿 𝑄
4.2.4. Economic Meaning of 𝑨 in 𝑸 = 𝑨𝑲𝜶 𝑳𝟏−𝜶
For given values of K and L, the magnitude of A will proportionately affect the level of output Q. Thus, A may be
considered as an efficiency parameter, that is, an indicator of the state of technology.
5. Least-Cost Combination of Inputs
Another example of constrained optimization is the problem of least-cost combination of inputs. Given a level of
output 𝑄, what is the least-cost combination of factor inputs to produce that output. Let 𝐾 and 𝐿 represent the factor
inputs. The total cost of hiring these inputs is
𝐶 = 𝑃𝐾 𝐾 + 𝑃𝐿 𝐿
Since the objective is to minimize the cost of production for a given level of output, the above cost equation is the
objective function to be minimized subject to a specified level of output. The production function is
𝑄 = 𝑄(𝐾, 𝐿)
The output constraint is then,
𝑄(𝐾, 𝐿) = 𝑄0
5.1. First-Order Condition
Forming the Lagrangian function,
𝑍 = 𝑃𝐾 𝐾 + 𝑃𝐿 𝐿 + µ[𝑄0 − 𝑄(𝐾, 𝐿)]
the FOC are
LN 8—Constrained Optimization
Page 28 of 38
𝜕𝑍
= 𝑄0 − 𝑄(𝐾, 𝐿) = 0
𝜕µ
𝜕𝑍
𝑍𝐾 =
= 𝑃𝐾 − µ𝑄𝐾 = 0
𝜕𝐾
𝑍µ =
𝑍𝐿 =
𝜕𝑍
= 𝑃𝐿 − µ𝑄𝐿 = 0
𝜕𝐿
From the last two equations we deduce,
𝑃𝐾
𝑃𝐿
=
=µ
𝑄𝐾 𝑄𝐿
This implies that the optimum combination of inputs requires that the outlay per unit of marginal product must be
equal for both inputs. The Lagrange multiplier µ here represents the marginal cost of production in the optimum
state.
The optimum condition can also be shown as
𝑃𝐾 𝑄𝐾
=
𝑃𝐿
𝑄𝐿
The first order condition provides that the ratio of marginal products be equal to the factor input price ratio. To
further explore this expression let’s consider the concepts of 𝑖𝑠𝑜𝑞𝑢𝑎𝑛𝑡𝑠 and 𝑖𝑠𝑜𝑐𝑜𝑠𝑡𝑠
5.2. Isoquants and 𝐈𝐬𝐨𝐜𝐨𝐬𝐭𝐬
A given level of output can be produced by using different combination of factor inputs. An isoquant curve, therefore,
represents the locus of various combination of inputs that yield that output. This was explained in section 4.2.1.2 and
shown in Figure 6 above. An isocost is the locus of various combination of inputs that cost the same. Figure 7 shows
an isoquant depicting the output level 𝑄0 . It also shows two isocosts, 𝐶0 and 𝐶1 .
Figure 7
K
D
K*
E
F
C₁
L*
LN 8—Constrained Optimization
Q₁
C₂
L
Page 29 of 38
Mathematically, the given or fixed level of output is expressed by setting the total differential of the production
function 𝑄 = 𝑄(𝐾, 𝐿) equal to zero.
𝑑𝑄 = 𝑄𝐾 𝑑𝐾 + 𝑄𝐿 𝑑𝐿 = 0
from which we obtain,
𝑑𝐾
𝑄𝐿
=−
𝑑𝐿
𝑄𝐾
To maintain the same level of output any decrease (increase) in the quantity of one input must be compensated by an
increase (a decrease) in the quantity of the other input. These substitutions take place at the margin. Thus, the rate at
which the quantity of one input is substituted or exchanged for the quantity of the other, 𝑑𝐾 ⁄𝑑𝐿, is called the
marginal rate of technical substitution (𝑀𝑅𝑇𝑆𝐿𝐾 ). Along the isoquant the marginal rate of technical substitution,
which also represents the slope at any point on the isoquant, is equal to the (negative of) the ratio of marginal product
of each input.
To draw the isocost line use the cost equation 𝐶 = 𝑃𝐾 𝐾 + 𝑃𝐿 𝐿, rearranging which provides
𝐾=
𝐶
𝑃𝐿
− 𝐿
𝑃𝐾 𝑃𝐾
To draw each isocost line, 𝐶 is treated as a parameter that causes the a shift of isocost. In Figure 6 two isocost lines
appear, one for 𝐶 = 𝐶0 and the higher one for 𝐶 = 𝐶1 . Taking the first derivative of the cost function, we have
𝑑𝐾
𝑃𝐿
=−
𝑑𝐿
𝑃𝐾
In Figure 6, to produce 𝑄0 , the optimal combination of the inputs is achieved at point 𝐸, where the slope of isocost line
is equal to the slope of the isoquant.
𝑃𝐿
𝑄𝐿
=
𝑃𝐾 𝑄𝐾
Stated differently, at E
𝑄𝐾 𝑄𝐿
=
𝑃𝐾
𝑃𝐿
That is, marginal product per dollar spent on each input is equal. Note that the input combination at points D and F on
the isoquant 𝑄0 are not optimal. At 𝐷, 𝑄𝐾 ⁄𝑃𝐾 < 𝑄𝐿 ⁄𝑃𝐿 . By substituting more L for K, cost of producing the same
output level would be reduced; the isocost line will shift left until it is tangent to the isoquant. The reverse would take
place if the initial position were point F, where 𝑄𝐾 ⁄𝑃𝐾 > 𝑄𝐿 ⁄𝑃𝐿 . More K will be substituted for L.
5.3. Second-Order Condition
In this situation the objective function 𝐶 = 𝑃𝐾 𝐾 + 𝑃𝐿 𝐿 is to be minimized subject to the output constraint 𝑄(𝐾, 𝐿) = 𝑄0 .
After forming the Lagrangian function and solving the system of the first-order equations,
𝑍𝜇 = 𝑄0 − 𝑄(𝐾, 𝐿) = 0
𝑍𝐾 = 𝑃𝐾 − µ𝑄𝐾 = 0
LN 8—Constrained Optimization
Page 30 of 38
𝑍𝐿 = 𝑃𝐿 − µ𝑄𝐿 = 0
Finding the second-order total differentials
𝑍𝜇𝜇 = 0
𝑍𝐾𝐾 = −µ𝑄𝐾𝐾
𝑍𝐿𝐾 = −µ𝑄𝐿𝐾
𝑍𝜇𝐾 = −𝑄𝐾
𝑍𝐾𝐿 = −µ𝑄𝐾𝐿
𝑍𝐿𝐿 = −µ𝑄𝐿𝐿
𝑍𝜇𝐿 = −𝑄𝐿
The bordered Hessian, as written below, must be negative for the stationary value of the cost to be a minimum.
0
|𝐻| = |𝑄𝐾
𝑄𝐿
𝑄𝐾
−µ𝑄𝐾𝐾
−µ𝑄𝐿𝐾
𝑄𝐿
−µ𝑄𝐾𝐿 | = µ(𝑄𝐾𝐾 𝑄𝐿2 − 2𝑄𝐾𝐿 𝑄𝐾 𝑄𝐿 + 𝑄𝐿𝐿 𝑄𝐾2 ) < 0
−µ𝑄𝐿𝐿
Since µ > 0, then (𝑄𝐾𝐾 𝑄𝐿2 − 2𝑄𝐾𝐿 𝑄𝐾 𝑄𝐿 + 𝑄𝐿𝐿 𝑄𝐾2 ) must be negative at the point of tangency of the isocost and the
isoquant (point E). The presence of the terms 𝑄𝐾𝐾 , 𝑄𝐿𝐿 , and 𝑄𝐾𝐿 requires certain restrictions on the curvature of the
isoquants. Keep in mind that the isoquant is shown as a functional relationship between the variables L and K. Thus,
the curvature of the isoquant is indicated by the second derivative of K with respect to L. The restriction required is
that the isoquant be strictly convex, for which the second derivative must be positive.
𝑑2𝐾
>0
𝑑𝐿2
The determination of second derivative is as follows.
𝑑𝐾
𝑄𝐿
=−
𝑑𝐿
𝑄𝐾
𝑑2𝐾
𝑑
𝑄𝐿
1
𝑑𝑄𝐿
𝑑𝑄𝐾
=
(− ) = − 2 (𝑄𝐾
− 𝑄𝐿
)
2
𝑑𝐿
𝑑𝐿
𝑄𝐾
𝑑𝐿
𝑑𝐿
𝑄𝐾
𝑑𝑄𝐿
𝑑𝐾
𝑄𝐿
= 𝑄𝐿𝐿 + 𝑄𝐿𝐾
= 𝑄𝐿𝐿 − 𝑄𝐿𝐾
𝑑𝐿
𝑑𝐿
𝑄𝐾
𝑑𝑄𝐾
𝑑𝐾
𝑄𝐿
= 𝑄𝐾𝐿 + 𝑄𝐾𝐾
= 𝑄𝐾𝐿 − 𝑄𝐾𝐾
𝑑𝐿
𝑑𝐿
𝑄𝐾
𝑑2𝐾
1
𝑄𝐿
𝑄𝐿
= − 2 [𝑄𝐾 (𝑄𝐿𝐿 − 𝑄𝐿𝐾 ) − 𝑄𝐿 (𝑄𝐾𝐿 − 𝑄𝐾𝐾 )]
2
𝑑𝐿
𝑄𝐾
𝑄𝐾
𝑄𝐾
𝑑2𝐾
1
𝑄𝐿2
=
−
(𝑄
𝑄
−
𝑄
𝑄
−
𝑄
𝑄
+
𝑄
)
𝐿𝐿
𝐾
𝐿𝐾
𝐿
𝐾𝐿
𝐿
𝐾𝐾
2
𝑑𝐿2
𝑄𝐾
𝑄𝐾
𝑑2𝐾
1
= − 3 (𝑄𝐿𝐿 𝑄𝐾2 − 2𝑄𝐾𝐿 𝑄𝐾 𝑄𝐿 + 𝑄𝐾𝐾 𝑄𝐿2 )
2
𝑑𝐿
𝑄𝐾
Since the terms in the parenthetical expression is the same as those in the bordered Hessian, therefore, if |𝐻| < 0,
then this parenthetical expression must also be negative, hence a positive second derivative. The isoquant is
therefore strictly convex at the point of tangency.
LN 8—Constrained Optimization
Page 31 of 38
5.4. Comparative-Statics of Least-Cost Combination Model
The comparative-static aspect of the current model involves the analysis of changes in the equilibrium (optimum)
combination of inputs when the output level changes, that is when the isoquant shifts, holding the input price ratio
(𝑃𝐾 ⁄𝑃𝐿 ) , the slope of the isocost, constant.
Figure 7 shows two successive increases in output shown by the shift in isoquant from 𝑄0 to 𝑄1 and then to 𝑄2 , with
each shift resulting in a new different point of tangency with the isocost. The locus of these points of tangency is
called the expansion path. Note that the expansion path in Figure 7 is linear. Along such expansion path the 𝐾/𝐿
ratio remains constant. The linear expansion path is a basic property of homogenous production functions.
Consider the generalized version of CDPF, 𝑄 = 𝐴𝐾 𝛼 𝐿𝛽 . Per FOC,
𝑃𝐾 𝑄𝐾 𝐴𝛼𝐾 𝛼−1 𝐿𝛽 𝛼𝐿
=
=
=
𝑃𝐿
𝑄𝐿 𝐴𝛽𝐾 𝛼 𝐿𝛽−1 𝛽𝐾
From which we derive,
𝐾 𝛼𝑃𝐿
=
𝐿 𝛽𝑃𝐾
Since all the terms on the right-hand-side (𝛼, 𝛽, 𝑃𝐾 , and 𝑃𝐿 ) remain unchanged as the isoquant shifts right, then 𝐾 ⁄𝐿
remains constant. In Figure 7,
𝐾0 𝐾1 𝐾2
=
=
𝐿0 𝐿1 𝐿2
Figure 7
K
Expansion
Path
K₂
Q₂
K₁
Q₁
K₀
Q₀
L₀
L₁
L₂
L
Note that any homogenous production function will generate a linear expansion path. However, a production function
HOD1, in addition to generating a linear expansion path, also has the property that if inputs are doubled (the scale of
production is doubled), output will also double, or if the inputs are tripled, output will also triple, ... Consider the
CDPF,
𝑄 = 𝐴𝐾 𝛼 𝐿1−𝛼
LN 8—Constrained Optimization
Page 32 of 38
𝑃𝐾 𝑄𝐾
𝐴𝛼𝐾 𝛼−1 𝐿1−𝛼
𝛼𝐿
=
=
=
𝑃𝐿
𝑄𝐿 𝐴(1 − 𝛼)𝐾 𝛼 𝐿−𝛼 (1 − 𝛼)𝐾
𝐴(2𝐾)𝛼 (2𝐿)1−𝛼 = 2𝐴𝐾 𝛼 𝐿1−𝛼 = 2𝑄
𝐾
𝛼𝑃𝐿
=
𝐿 (1 − 𝛼)𝑃𝐾
𝐴(𝑐𝐾)𝛼 (𝑐𝐿)1−𝛼 = 𝑐𝐴𝐾 𝛼 𝐿1−𝛼 = 𝑐𝑄
(Linear expansion path)
(Constant returns to scale)
In Figure 7, the production function represented by the three isoquants is HOD1. Note that
𝑂𝐿1 = 2𝑂𝐿0
𝑂𝐿2 = 3𝑂𝐿0
5.5.
𝑂𝐾1 = 2𝑂𝐾0
𝑂𝐾2 = 3𝑂𝐾0
𝑂𝐸1 = 2𝑂𝐸0
𝑂𝐸2 = 3𝑂𝐸2
Homothetic Functions
If the function 𝑄 = 𝑄(𝐾, 𝐿) is homogenous of degree r (r = 0, 1, 2,...), then this function can give rise to a homothetic
function in the form of a composite function,
𝐻 = 𝐻(𝑄) = 𝐻[𝑄(𝐾, 𝐿)]
[𝐻′(𝑄) ≠ 0]
The homothetic function is in general not homogeneous in the variables K, and L, but it does generate a linear
expansion path. The latter property is due to the fact that the H isoquants share the same slope as the Q isoquants.
The slope of the Q isoquant is,
𝑑𝐾
𝜕𝑄 ⁄𝜕𝐾
𝑄𝐾
=−
=−
𝑑𝐿
𝜕𝑄 ⁄𝜕𝐿
𝑄𝐿
The slope of the H isoquant is
𝑑𝐾
𝐻𝐾
=−
𝑑𝐿
𝐻𝐿
where,
𝐻𝐾 =
𝑑𝐻 𝜕𝑄
= 𝐻 ′ (Q)𝑄𝐾
𝑑𝑄 𝜕𝐾
𝐻𝐿 =
𝑑𝐻 𝜕𝑄
= 𝐻′ (Q)𝑄𝐿
𝑑𝑄 𝜕𝐿
Thus,
𝑑𝐾
𝐻′ (Q)𝑄𝐾
𝑄𝐾
=− ′
=−
𝑑𝐿
𝐻 (Q)𝑄𝐿
𝑄𝐿
Another important property of homothetic production functions is the elasticity of optimal input levels (input
combinations at the point of tangency) with respect to the output level is uniform for the inputs K and L. To show this,
consider the property of linear expansion paths (which applies to homothetic production functions) that the 𝐾 ⁄𝐿 ratio
remains constant for all output levels. Mathematically this is expressed as
𝜕 𝐾
( )=0
𝜕𝐻0 𝐿
LN 8—Constrained Optimization
Page 33 of 38
𝜕 𝐾
1
𝜕𝐾
𝜕𝐿
( ) = 2 (𝐿
−𝐾
)=0
𝜕𝐻0 𝐿
𝐿
𝜕𝐻0
𝜕𝐻0
which implies,
𝐿
𝜕𝐾
𝜕𝐿
=𝐾
𝜕𝐻0
𝜕𝐻0
Multiply both sides by 𝐻0 ⁄(𝐾𝐿)
𝐿
𝜕𝐾 𝐻0
𝜕𝐿 𝐻0
=𝐾
𝜕𝐻0 𝐾𝐿
𝜕𝐻0 𝐾𝐿
𝜕𝐾 𝐻0
𝜕𝐿 𝐻0
=
𝜕𝐻0 𝐾
𝜕𝐻0 𝐿
𝜀𝐾𝐻0 = 𝜀𝐿𝐻0
Example
Let 𝐻 = 𝑄2 , where 𝑄 = 𝐴𝐾 𝛼 𝐿𝛽 . First show that H is homothetic. Then show that the slope of H isoquant is equal to
the slope of the Q isoquant.
For H to be homothetic, Q must be homogenous (which is) and 𝐻′ (𝑄) > 0.
𝐻′ (𝑄) =
𝑑𝐻
= 2𝑄 > 0
𝑑𝑄
Next,
2
𝐻 = 𝑄2 = (𝐴𝐾 𝛼 𝐿𝛽 ) = 𝐴2 𝐾 2𝛼 𝐿2𝛽
𝑑𝐾
𝐻𝐾
𝐴2 2𝛼𝐾 2𝛼−1 𝐿2𝛽
𝛼𝐿
=−
=− 2
=−
𝑑𝐿
𝐻𝐿
𝛽𝐾
𝐴 2𝛽𝐾 2𝛼 𝐿2𝛽−1
𝑑𝐾
𝑄𝐾
𝐴𝛼𝐾 𝛼−1 𝐿𝛽
𝛼𝐿
=−
=−
=−
𝛼
𝛽−1
𝑑𝐿
𝑄𝐿
𝛽𝐾
𝐴𝛽𝐾 𝐿
Note that,
𝑄(𝑐𝐾, 𝑐𝐿) = 𝑐 𝛼+𝛽 𝐴𝐾 𝛼 𝐿𝛽 = 𝑐 𝛼+𝛽 𝑄(𝐾, 𝐿)
𝐻(𝑐𝐾, 𝑐𝐿) = 𝐴2 (𝑐𝐾)2𝛼 (𝑐𝐿)2𝛽 = 𝑐 2(𝛼+𝛽) 𝐻
[Homogenous of degree (𝛼 + 𝛽)]
[Homogenous of degree 2(𝛼 + 𝛽)]
Example
Let 𝐻 = 𝑒 𝑄 , where 𝑄 = 𝐴𝐾 𝛼 𝐿𝛽 . First show that H is homothetic. Then show that the slope of H isoquant is equal to
the slope of the Q isoquant.
For H to be homothetic, Q must be homogenous (which is) and 𝐻′ (𝑄) > 0.
𝐻 = 𝑒 𝐴𝐾
𝐻′ (𝑄) =
𝛼𝐿𝛽
𝑑𝐻
= 𝑒𝑄 > 0
𝑑𝑄
LN 8—Constrained Optimization
Page 34 of 38
𝑑𝐾
𝐻𝐾
=−
𝑑𝐿
𝐻𝐿
𝐻𝐾 =
𝜕𝐻
𝜕
𝛼 𝛽
𝛼 𝛽
=
(𝑒 𝐴𝐾 𝐿 ) = 𝐴𝛼𝐾 𝛼−1 𝐿𝛽 𝑒 𝐴𝐾 𝐿 = 𝐴𝛼𝐾 𝛼−1 𝐿𝛽 𝐻
𝜕𝐾 𝜕𝐾
𝐻𝐿 =
𝜕𝐻
𝜕
𝛼 𝛽
𝛼 𝛽
=
(𝑒 𝐴𝐾 𝐿 ) = 𝐴𝛽𝐾 𝛼 𝐿𝛽−1 𝑒 𝐴𝐾 𝐿 = 𝐴𝛽𝐾 𝛼 𝐿𝛽−1 𝐻
𝜕𝐿 𝜕𝐿
𝑑𝐾
𝐴𝛼𝐾 𝛼−1 𝐿𝛽 𝐻
𝛼𝐿
=−
=−
𝛼
𝛽−1
𝑑𝐿
𝛽𝐾
𝐴𝛽𝐾 𝐿 𝐻
Is 𝐻 = 𝑒 𝑄 homogenous?
𝐻(𝑐𝐾, 𝑐𝐿) = 𝑒 𝐴(𝑐𝐾)
𝐻(𝑐𝐾, 𝑐𝐿) = (𝑒 𝐴𝐾
𝐻(𝐾, 𝐿) = 𝑒 𝐴𝐾
𝛼𝐿𝛽
𝛼 (𝑐𝐿)𝛽
𝛼𝐿𝛽
)
= 𝑒 𝐴𝐾
𝑐 𝛼+𝛽
𝛼 𝐿 𝛽 𝑐 𝛼+𝛽
= [𝐻(𝐾, 𝐿)]𝑐
𝛼+𝛽
is not homogeneous. It does not satisfy the condition 𝐻(𝑐𝐾, 𝑐𝐿) = 𝑐 𝑟 𝐻(𝐾, 𝐿).
5.6. Elasticity of Substitution
Elasticity of substitution pertains to the impact of changes in the factor input price ratio 𝑃𝐿 ⁄𝑃𝐾 on the optimal
combination of inputs for a given level of output. Note that optimum combination of L, and K is achieved at the point
of tangency of the isocost with the isoquant. The factor price ratio is the slope of the isocost line,
𝐾=
𝐶
𝑃𝐿
− 𝐿
𝑃𝐾 𝑃𝐾
Any change in the price ratio will change the isocost line, hence optimum combination of K, and L, that is the input
ratio 𝐾 ⁄𝐿. For example, a rise in 𝑃𝐾 will cause a substitution of L for K, thus changing the 𝐾 ⁄𝐿 ratio. The sensitivity of
the factor input ratio to changes in the factor price ratio is measured by the elasticity of (input) substitution. EOS is
computed as the proportional change in 𝐾 ⁄𝐿 relative to a proportional change in 𝑃𝐿 ⁄𝑃𝐾 .
𝑑(𝐾 ⁄𝐿)
𝑑(𝐾 ⁄𝐿) 𝑃𝐿 ⁄𝑃𝐾
𝐾 ⁄𝐿
𝜎=
=
𝑑(𝑃𝐿 ⁄𝑃𝐾 ) 𝑑(𝑃𝐿 ⁄𝑃𝐾 ) 𝐾 ⁄𝐿
𝑃𝐿 ⁄𝑃𝐾
Note that when the input ratio is fixed for all output level, then σ = 0. In this case, the inputs are said to be
complements. Any change in the price ratio, will leave the input combination unchanged. But for any positive EOS
coefficient , the larger σ, the more closely substitutable are the inputs.
5.6.1. Elasticity of Substitution for Homogenous Production Functions
Once again, consider the generalized CDPF,
𝑄 = 𝐴𝐾 𝛼 𝐿𝛽
We learned that for such functions at the point tangency
LN 8—Constrained Optimization
Page 35 of 38
𝐾 𝛼𝑃𝐿
=
𝐿 𝛽𝑃𝐾
Thus,
𝑑(𝐾 ⁄𝐿)
𝛼
=
𝑑(𝑃𝐿 ⁄𝑃𝐾 ) 𝛽
And, by rearranging,
𝑃𝐿 ⁄𝑃𝐾 𝛽
=
𝐾 ⁄𝐿
𝛼
The EOS is then,
𝜎=
𝑑(𝐾 ⁄𝐿) 𝑃𝐿 ⁄𝑃𝐾 𝛼 𝛽
=
=1
𝑑(𝑃𝐿 ⁄𝑃𝐾 ) 𝐾 ⁄𝐿
𝛽𝛼
This is true for a homogenous production function of any degree.
5.7.
Constant Elasticity of Substitution (CES) Production Functions
A CES production, as the name implies has the EOS coefficient which is a constant value other 1. The function is as
follows,
𝑄(𝐾, 𝐿) = 𝐴[𝛿𝐾 −𝜌 + (1 − 𝛿)𝐿−𝜌 ]−1⁄𝜌
In this function,
𝐴 > 0, represents the efficiency parameter, an indicator of the state of technology.
0 < 𝛿 < 1, is the distribution parameter and like α in the CDPF indicates the relative factor shares in the product.
−1 < 𝜌 <≠ 0, is the substitution parameter, representing the (constant) elasticity of substitution.
5.7.1.
CES Production Function is HOD1
This is easy to show,
𝑄(𝑐𝐾, 𝑐𝐿) = 𝐴[𝛿(𝑐𝐾)−𝜌 + (1 − 𝛿)(𝑐𝐿)−𝜌 ]−1⁄𝜌 = 𝐴(𝑐 −𝜌 [𝛿𝐾 −𝜌 + (1 − 𝛿)𝐿−𝜌 ])−1⁄𝜌
𝑄(𝑐𝐾, 𝑐𝐿) = 𝐴[𝛿(𝑐𝐾)−𝜌 + (1 − 𝛿)(𝑐𝐿)−𝜌 ]−1⁄𝜌 = (𝑐 −𝜌 )−1⁄𝜌 𝐴[𝛿𝐾 −𝜌 + (1 − 𝛿)𝐿−𝜌 ]−1⁄𝜌 = 𝑐𝑄(𝐾, 𝐿)
5.7.2. Isoquants of the CES Production Function are Negatively Sloped and Strictly Convex
Show that,
𝑑𝐾
𝑄𝐿
=−
<0
𝑑𝐿
𝑄𝐾
To facilitate the presentation of obtaining 𝑄𝐿 and 𝑄𝐾 , let [𝛿𝐾 −𝜌 + (1 − 𝛿)𝐿−𝜌 ] ≡ [𝐵]
LN 8—Constrained Optimization
Page 36 of 38
𝑄𝐿 =
𝜕𝑄
1
= 𝐴 (− ) [𝐵]−(1⁄𝜌)−1 (1 − 𝛿)(−𝜌)𝐿−𝜌−1
𝜕𝐿
𝜌
𝑄𝐿 =
𝜕𝑄
= (1 − 𝛿)𝐴[𝐵]−(1+𝜌)⁄𝜌 𝐿−(1+𝜌)
𝜕𝐿
𝑄𝐿 =
𝜕𝑄
𝐴1+𝜌
= (1 − 𝛿) 𝜌 [𝐵]−(1+𝜌)⁄𝜌 𝐿−(1+𝜌)
𝜕𝐿
𝐴
1
− (1+𝜌)
𝜕𝑄 (1 − 𝛿) 1+𝜌 −(1+𝜌)⁄𝜌 −(1+𝜌) (1 − 𝛿) 𝐴1+𝜌 [𝐵] 𝜌
𝑄𝐿 =
=
𝐴 [𝐵]
𝐿
=
𝜕𝐿
𝐴𝜌
𝐴𝜌
𝐿1+𝜌
1+𝜌
𝜕𝑄 (1 − 𝛿) (𝐴𝐵 −1⁄𝜌 )
𝑄𝐿 =
=
𝜕𝐿
𝐴𝜌
𝐿1+𝜌
𝑄𝐿 =
𝜕𝑄 (1 − 𝛿) 𝑄 1+𝜌
=
( )
>0
𝜕𝐿
𝐴𝜌
𝐿
In the same fashion,
𝑄𝐾 =
𝜕𝑄
𝛿 𝑄 1+𝜌
= 𝜌( )
>0
𝜕𝐾 𝐴 𝐾
Thus,
(1 − 𝛿) 𝐾 1+𝜌
𝑑𝐾
𝑄𝐿
=−
=−
( )
<0
𝑑𝐿
𝑄𝐾
𝛿
𝐿
Now, what is the EOS of the CES function?
𝜎=
𝑑(𝐾 ⁄𝐿) 𝑃𝐿 ⁄𝑃𝐾
𝑑(𝑃𝐿 ⁄𝑃𝐾 ) 𝐾 ⁄𝐿
To find 𝐾 ⁄𝐿 as a function of 𝑃𝐿 ⁄𝑃𝐾 ,
𝑄𝐿
𝑃𝐿
=
𝑄𝐾 𝑃𝐾
(1 − 𝛿) 𝐾 1+𝜌 𝑃𝐿
( )
=
𝛿
𝐿
𝑃𝐾
𝐾
𝛿 1
=(
)
𝐿
1−𝛿
⁄(1+𝜌)
𝑃𝐿 1⁄(1+𝜌)
𝑃𝐿 1⁄(1+𝜌)
( )
≡ 𝐷( )
𝑃𝐾
𝑃𝐾
To facilitate presentation, 𝐷 ≡ (
𝛿
1−𝛿
)
1⁄(1+𝜌)
.
Thus,
𝑑(𝐾 ⁄𝐿)
𝐷
𝑃𝐿 1⁄(1+𝜌)−1
=
( )
𝑑(𝑃𝐿 ⁄𝑃𝐾 ) 1 + 𝜌 𝑃𝐾
LN 8—Constrained Optimization
Page 37 of 38
and,
𝑃𝐿 ⁄𝑃𝐾
𝑃𝐿 ⁄𝑃𝐾
1 𝑃𝐿 1−1⁄(1+𝜌)
=
=
( )
𝐾 ⁄𝐿
𝐷(𝑃𝐿 ⁄𝑃𝐾 )1⁄(1+𝜌) 𝐷 𝑃𝐾
𝜎=
𝑑(𝐾 ⁄𝐿) 𝑃𝐿 ⁄𝑃𝐾
𝐷
𝑃𝐿 1⁄(1+𝜌)−1 1 𝑃𝐿 1−1⁄(1+𝜌)
=
( )
( )
𝑑(𝑃𝐿 ⁄𝑃𝐾 ) 𝐾 ⁄𝐿
1 + 𝜌 𝑃𝐾
𝐷 𝑃𝐾
𝜎=
1
1+𝜌
This shows that the coefficient of EOS is a constant whose magnitude depends on the value of the parameter 𝜌.
−1 < 𝜌 < 0
𝜎>1
𝜌 = 0 } ⇒ {𝜎 = 1
0<𝜌<∞
𝜎<1
Note that when 𝜌 = 0, then 𝜎 = 1. This indicates that CDPF, where 𝜎 = 1, is a special case of the CES function.
Actually, the CES production function tends to the CDPF as ρ → 0.
LN 8—Constrained Optimization
Page 38 of 38