Team 04 DD Rev D 2012 - Colorado Space Grant Consortium
advertisement

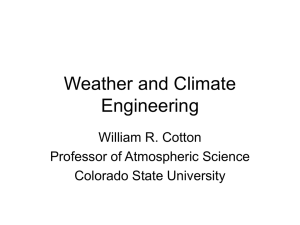
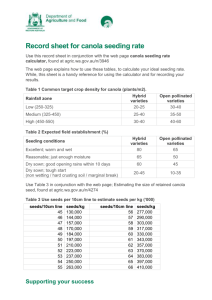
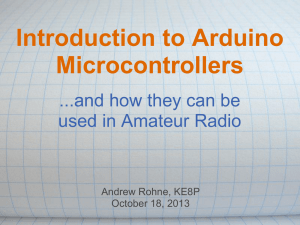
B.O.S.S. – Balloon-Operated Seeding System Colorado Space Grant Consortium GATEWAY TO SPACE FALL 2012 DESIGN DOCUMENT Team Up, Up, and Away Written by: Trevor Arrasmith, Ty Bailey, Cameron Coupe, Samuel Frakes, Brandon Harris, Carolyn Mason, Soo Rin Park, and Peter VanderKley December 12, 2012 Revision D Team Up, Up, and Away Page | 1 B.O.S.S. – Balloon-Operated Seeding System Table of Contents Revision Log…………………………………………………………….…………3 Mission Overview………………………………………………………………….4 Requirements Flow-Down Chart…………………………………………………...5 Design………………………………………………………………………………8 Management………………………………………………………………………10 Budget……………………………………………………………………………..13 Test Plan and Results……………………………………………………………...14 Expected Results…………………………………………………………………..20 Launch Day Plan………………………………………………………………….22 Results, Analysis, Conclusion…………………………………………………….24 Conclusions and Lessons Learned………………………………………………..36 Message to Next Semester………………………………………………………..36 Sources Cited……………………………………………………………………...37 Team Up, Up, and Away Page | 2 B.O.S.S. – Balloon-Operated Seeding System Revision Log Revision Description Date A/B Conceptual and Preliminary Design Review 10/22/2012 C Critical Design Review 11/15/12 D Final Report 12/12/12 Team Up, Up, and Away Page | 3 B.O.S.S. – Balloon-Operated Seeding System MISSION OVERVIEW: Mission Statement: Team Up, Up, and Away will attempt to prove the feasibility and cost effectiveness of a balloon-mounted cloud seeding system. The mission of team Up, Up, and Away was to successfully send a Balloon-Satellite to over 30,000 m (100,000 feet) and test a cloud seeding mechanism at 20 minutes (an altitude of about 5000 meters) which is the standard altitude of cloud seeding, as this is where Cumulonimbus and Nimbostratus clouds exist, which are the clouds that commonly produce rain - and 30 minutes (about 10,000 meters) which is nearing the highest altitude that clouds exist [1]. Team Up, Up, and Away is attempting to study the feasibility and efficacy of a balloon-mounted cloud seeding system at varying altitudes. The balloon-mounted cube-sat will have a particle substance, Sodium Chloride, the use of which in cloud seeding is called hygroscopic cloud seeding [2]. The substance will be dropped out of one of two cones inside the BalloonSat at a time, each time dispensing all of the powder in that cone. The results of the physical experiment will then be compared with the data on humidity, temperature, and pressure to prove or disprove the effectiveness of our mechanism. The mechanism will consist of two funnels, each containing a predetermined mass of a Sodium Chloride and reflective glitter mixture so that we can better see the powder. A Servo below the funnel opening will control the release of the mixture out the bottom of the cube at the determined times derived from the desired altitudes. A chute will be in place under the openings to provide a backdrop to better witness the release of the mixture recorded by the GoPro. No such experiment has been performed, and the findings should be completely original. Data will be achieved in several different subareas; first and foremost, to prove the feasibility and cost effectiveness of balloon sourced cloud seeding at standard cloud seeding altitude. The next goal is to find data on the efficacy of our cloud seeding mechanism at standard and high altitude. If this is proven useful, it could have major effect on cloud seeding as a whole. If water vapor exists at higher altitudes at low enough temperatures, only without a particle upon which to condensate, high altitude particle cloud seeding would reveal a previously untapped source of water. Although not particularly well known, cloud seeding is extensive in where and how it's used. One of the most common uses is to attempt to encourage precipitation during droughts one of the most recent applications of this goal was in China, where the government attempted to alleviate one of its worst droughts in decades with cloud seeding. After seeding, however, the temperature dropped significantly, resulting in a blizzard. "Officials said their cloud-seeding program directly caused the snowstorm. Engineers blasted more than 400 cigarette-size sticks of silver iodide into the sky shortly before the storm, and a senior engineer told Reuters that it was 'a procedure that made the snow a lot heavier...' The blizzard caused 12 area highways around Beijing to close," [3]. Cloud seeding is even used for the opposite, to alleviate rain or cloud cover. In another instance in Beijing, officials had promised clear skies for the 2008 summer Olympics, and "The Chinese government seeded clouds ahead of the 2008 Olympics opening ceremony to create a downpour elsewhere and keep the stadium dry. This involved firing rockets packed with silver iodide crystals into rain clouds over the suburbs of Beijing" [4]. Another use for cloud seeding is at airports, where ground fog and clouds are far more dangerous Team Up, Up, and Away Page | 4 B.O.S.S. – Balloon-Operated Seeding System to landing planes than rain, so cloud seeding is used to cause the clouds to precipitate and dissipate. One other use for cloud seeding is for recreational purposes, notably in ski areas. Vail Resorts, for instance, frequently seeds clouds with silver iodide to encourage snowfall. Further research in cloud seeding can have long-lasting and global impact. Almost all locations in the world are at one point or another affected by drought or can benefit from additional precipitation. It is cost efficient as well, as the cost of materials and implementation is fairly cheap, even on a large scale, and the resulting precipitation saves significantly more money. The issue strikes particularly close to home here in Colorado, both with the recent drought and with the numerous ski resorts in the state dependent on snowfall. If the experiment is proven successful, it may reveal the possibility for even further cloud seeding opportunities in areas which it may not have been previously feasible. Even if unsuccessful, the experiment will hopefully open other eyes to the idea and practice of cloud seeding. REQUIREMENTS FLOW-DOWN CHART: The requirements of B.O.S.S. are based upon the goal of the completion of the mission objective. In order to accomplish the objective, Team Up, Up, and Away must create a functional and reliable mechanism to release NaCl powder at the pre-specified altitudes where the drop would be most useful in the aiding of precipitation. Furthermore, we must fulfill the requirements as stated on the Request for Proposal and also those derived from our mission objective, both of which are defined below. Team Up, Up, and Away Page | 5 B.O.S.S. – Balloon-Operated Seeding System Level 0 Requirements 0.0 0.1 0.2 0.3 0.4 0.5 Requirement Prove the possibility and efficiency of a balloon-mounted mechanism for cloud seeding: Named B.O.S.S. for Balloon-Operated Seeding System Keep internal temperature above -10°C Keep total weight and budget spent under or equal to 1.125 kg and $250 respectively Collect data for humidity, air pressure, acceleration, wind speed, and inside and outside temperature Maintain safety of all team members at all times Post-flight, B.O.S.S. will be ready to fly again Origin Mission Statement RFP RFP RFP RFP RFP Level 1 Requirements Requirement 0.0: Prove the possibility and efficiency of a balloon-mounted mechanism for cloud seeding # Requirement Origin Test the effectiveness and reliability of the funnel dispersing system of 0.0.0 B.O.S.S. 0.0 0.0.1 Integrate the Servos to the Arduino 0.0 Set the Servos to disperse the salt powder in the funnels to at 20 minutes and 0.0.2 30 minutes, respectively. 0.0 0.0.3 Use cameras to monitor and confirm salt dispersal 0.0 Optimize the weight of the satellite such that the amount of salt that can be 0.0.4 carried is maximized 0.0 Compare the cost and the reliability data of B.O.S.S. to other conventional 0.0.5 cloud seeding methods 0.0 Integrate the digital camera and the GoPro to B.O.S.S. (charged and memory 0.1.0 cards cleared) 0.0 0.1.2 Perform duration tests in order to ensure functionality for entire flight # 0.1.1 0.1.2 0.1.3 0.1.4 Requirement 0.1: Keep internal temperature above -10°C Requirement Run electric active heater system powered by 3 9V batteries Insulate B.O.S.S. using foam insulation and aluminum tape Test the functionality of B.O.S.S. under extreme cold conditions (both internal and external components) prior to launch with various tests (primarily cooler test) and make necessary alterations Record temperature with Arduino in order to ensure requirement 0.3 is fully met Origin 0.1 0.1 0.1 0.1 Team Up, Up, and Away Page | 6 0.0 B.O.S.S. – Balloon-Operated Seeding System Requirement 0.2: Keep total weight and budget spent under or equal to 1.125 kg and $250 respectively # Requirement Origin Weigh the satellite to ensure weight is under 1.125 kg and keep a spending 0.2.0 log to keep track of the spending budget 0.2 0.2.1 Team member in charge of spending budget: Ty Bailey 0.2 Create a contract with other teams to “borrow” mass from other teams if 0.2.2 necessary 0.2 Requirement 0.3: Collect data for humidity, air pressure, acceleration, wind speed, and inside and outside temperature # Requirement Origin Test functionality of each sensor separately with their own respective tests 0.3.0 (refer to “Testing Section”) 0.3 0.3.1 Program each sensor with arduino. Test and document sensor performance. 0.3 Test B.O.S.S. in a cooler with dry ice to ensure systems functionality in 0.3.2 extreme conditions 0.3 Test structural integrity with drop, whip, and stair tests (as this is what 0.3.3 encloses and protects our systems) 0.3 0.3.4 Write data from all sensors on SD card on SparkFun ProtoShield 0.3 0.3.5 Practice retrieving and analyzing data from SD card 0.3 0.3.6 Place LEDs on exterior of to indicate power to all systems 0.3 # 0.4.0 0.4.1 0.4.2 0.4.3 # 0.5.0 0.5.1 Requirement 0.4: Maintain safety of all team members at all times Requirement Always maintain safe habits and working conditions when working with and around B.O.S.S. Design and carry out safe testing procedures (only test remaining is cooler test) Perform careful and safe construction (i.e. soldering, use of hot glue and other potentially harmful adhesives, etc.) Place sticker of U.S. flag visibly on exterior Requirement 0.5: B.O.S.S. will be ready to fly again Requirement Design and test B.O.S.S. (and all its components) to withstand forces encountered at balloon burst and landing Make necessary adjustments and alterations to B.O.S.S. after recovery on launch day Origin 0.4 0.4 0.4 0.4 Origin 0.5 0.5 Team Up, Up, and Away Page | 7 B.O.S.S. – Balloon-Operated Seeding System DESIGN: Because the purpose of our mission is to test the feasibility of balloon-based cloud seeding, we will determine our success based on the functionality of our release system. The satellite will contain two separate but identical release systems, one of which will be programmed to release at 20 minutes after launch (at an altitude of 5,000 meters), and the other of which will be programmed to release at 30 minutes after launch (an altitude of 10,000 meters). Each system will consist of an aluminum funnel, an oscillating aluminum plate, and a Servo. Each funnel will contain approximately 50 grams of powder, which will be released at the predetermined times. In order to release, the Servo will rotate the aluminum plate along the underlying surface of the insulation to align a series of holes allowing powder to flow freely from the funnel and out the bottom of the satellite. This system will be mounted to the inner sides of the cube using paperclips, hot glue, and aluminum tape. Two Arduino UNO units will be flown in order to command the Servos and collect data from all sensors. The outer structure will consist of foam core, insulation, and a non-metal flight tube to accommodate the flight string. This design complies with all requirements specified in the Request for Proposal. For science data an anemometer will be included. The anemometer will be placed on the top of the BalloonSat to collect data on the vertical ascension rate of the balloon. The mass of the satellite will be at the maximum allowable mass of 1125 grams, but will not exceed it. All required sensors and components such as the Arduino, digital camera, and heater will be flown and the internal temperature will remain above -10 degrees Celsius. The outside of the satellite will have an American flag sticker, contact information, and a CU Buffs sticker in order to assist with its retrieval. An external switch will be flipped prior to launch in order to provide power to the Arduino UNO units and the heater. Holes will be cut in the insulation and foam core to allow for the GoPro and digital camera to be turned on manually. In addition, an LED on the outside of the cube will confirm that all systems are powered on. After flight, the BalloonSat will be analyzed and returned to Professor Koehler in working condition and ready for another flight. The functionality of the mechanisms is dependent on many of the satellite’s parts. One Arduino must command the Servos to oscillate, at which point the oscillating aluminum plate will move along the surface of the insulation and allow the powder to be released. The second Arduino will collect data from the anemometer, temperature sensor, pressure sensor, humidity sensor, and accelerometer, as well as power on the digital camera. The GoPro and digital camera will be powered by their own respective batteries and record to their respective SD cards. All necessary components have been acquired, although we are currently awaiting two new Servos to replace the damaged original Servos. Ty Bailey has an additional backup Servo that we will use in the event of one of these Servos failing. We have acquired enough salt and reflective glitter to be able to thoroughly test our mechanisms and the visibility of the powder to the GoPro camera before the flight date. Team Up, Up, and Away Page | 8 B.O.S.S. – Balloon-Operated Seeding System VIZUALIZATION: Side View Top View Team Up, Up, and Away Page | 9 B.O.S.S. – Balloon-Operated Seeding System FUNCTIONAL BLOCK DIAGRAM: Color Key: Purple: switch, red: power, orange: micro controller, green: SD memory, yellow: Purpose of set-up, blue: LED MANAGEMENT: Effective project management is crucial to the success of Team Up, Up, and Away’s mission. Therefore, areas of focus are assigned to each team member, while ensuring that no team member is left alone in any task. A rigid schedule has been constructed to keep the team on track with testing, construction, and other work. Team meetings are held every Saturday at noon. Additional meetings are scheduled as needed, typically on Mondays and Wednesdays. Because the duration of this project spans approximately three months, time limitations are a concern. All team members must budget their time with other classes and will have to devote many hours per week to this project. Team Up, Up, and Away Page | 10 B.O.S.S. – Balloon-Operated Seeding System TEAM SAFETY: In order to ensure the safety of all team members, we have used and will continue to use safety goggles during all soldering and aluminum cutting. All structure tests were done clear from passers-by and windows as to make sure no humans or property was damaged. Dry ice will be handled carefully with gloves during the cooler test. All tests have been done with two or more team members present and the cooler test will be conducted with at least three team members present. TEAM MEMBERS AND ROLES: Trevor Arrasmith Ty Bailey Cameron Coupe Samuel Frakes Brandon Harris Carolyn Mason Soo Rin Park Peter VanderKley - Design and Design Illustration-Lead Science and Documentation Videographer Programming-Lead Budgeter Project Manager Electrical Structures-Lead Science and Documentation Science and Documentation-Lead Structure Electrical-Co-Lead Foreman Programming Electrical-Co-Lead Vice Project Manager Programming Structures Team Up, Up, and Away Page | 11 B.O.S.S. – Balloon-Operated Seeding System SCHEDULE: Task to be Completed Date First Design Complete PDR Authority to Proceed Hardware Acquired Initial Programming Accelerometer Test CDR Sensor calibration Done Heater Test Camera(s) Test Mass Model Drop Test Whip Test Stair Test Humidity Sensor Test Pressure Sensor Test Temperature Sensors Test Anemometer Test Final structure 9/27 10/1 10/5 10/10 10/10 10/16 10/18 10/18 10/18 10/20 10/21 10/21 10/21 10/21 10/27 10/27 10/28 11/2 11/8 Initial Powder Release Test 11/8 Task to be Completed Date Electronics Build BalloonSat Completed Complete Programming Complete Systems Test Demo Mission Test Cooler Test Launch Readiness Review DD Rev C Due Final Weigh-in Launch Troubleshooting Analysis of Flight Data ITLL Design Expo Document Results Final Report Team Video Assembly Final Presentation Due 11/10 11/14 11/14 11/14 11/15 11/17 11/27 11/16 11/30 12/1 11/5 - 12/9 12/1 – 12/7 12/8 12/9 12/9 11/1 – 12/10 12/11 Team Up, Up, and Away Page | 12 B.O.S.S. – Balloon-Operated Seeding System BUDGET: Item Quantity 9V batteries Mighty Mini Servo (HS-225MG) Aluminum Bare Sheet Tin Funnels (8996T12) Sodium Chloride Powder Mathmos Wind Light (Part # not available) GoPro Canon Camera Arduino Unos (2) Heater Foam Core and Insulation U.S. Flag Hot Glue Aluminum Tape Paperclips Cost Weight Place of Purchase 5 4 (2 Backups) 0.5 meters2 2 $85.94 190 g 62 g Wal-Mart Servocity.com $8.62 20 g 61.9 g Space Grant Mcmaster.com 100 grams 1 $25.20 100 g 11.5 g King Soopers Lamplust.com - 150 g 130 g 158 g 30.4 g 244.5 g 0.7g 50g 26g 5g Provided (by student) Provided Provided Provided Provided Provided Provided Provided Provided 1 1 2 1 2 sheets 1 2 sticks 1 meter 2 Total $119.76 1,240g The original mass budget was exceeded with prior approval from Chris and with a donation of 150g of mass from Team 8. Company contact information: Servocity McMaster Lamplust Phone: (620) 221-0123 Phone: (630) 833-0300 Email: chi.sales@mcmaster.com Address: 600 N County Line Rd. Elmhurst, IL 60126-2081 Phone: (866) 490-9358 Email: sales@lamplust.com BUDGET MANAGEMENT: Ty Bailey is the budget manager. He will keep an itemized list of all the parts, their place of purchase, cost of part and shipping. He will verify these costs with professor Koehler. Team Up, Up, and Away Page | 13 B.O.S.S. – Balloon-Operated Seeding System TEST PLAN AND RESULTS: STRUCTURAL TESTING: A mock-up structure was created to undergo the drop test, tumble test, and whip test. The mass of this structure totaled approximately 1,200 grams and the mass was distributed inside the box in order to simulate the layout of the actual satellite. Below is the outcome of these tests: DROP TEST: The mass model was dropped from the second and third floor of the ITLL to test structural integrity. Weights were included inside the box and taped down to produce an accurate center of mass for the design. The box survived with light to moderate damage on the edges and corners, but the integrity of the structure was not compromised. We will not make any changes to the structure because we are confident that the design can fully protect its contents. TUMBLE TEST: The mass model was tossed the down several flights of stairs (weights included) to observe further reliability of the structure. We found that the box survived very well with only light damage to the corners. The weights inside stayed in place and we are confident that we will be able to secure the real components inside the satellite. WHIP TEST: We tested to make sure that the satellite would remain attached to the flight rope during flight and survive the acceleration, by conducting a whip test. The test was set up by putting the satellite at the end of a string, attached exactly like it will be to the flight rope. We took the apparatus to an overhang, held it over the edge, and violently swung the satellite in circles to ensure its stability. We were able to swing the satellite around without it breaking off the rope. We are confident that the pipe will be able to hold the satellite to the rope for all conditions experienced during the flight. POWDER RELEASE TEST: Our salt dispersal system releases powder by sweeping aluminum plates underneath each of two funnels. We have been modifying and tuning the system so that it will disperse powder at the proper altitudes without failure. Results: We initially planned to run all of the sensors and Servos from one Arduino. However, due to unforeseen complications of unpredictable behavior from the Servos, we will now fly both Arduino units. We discovered that the one wire bus used for the digital temperature sensors caused osculation in the signal and created the twitching motions of the Servos. We chose to reduce complications with the electronics by running the Servos from a separate Arduino. The Servos are currently programmed to release the powder at 20 and 30 minutes after the beginning of the flight. We ran our initial tests without powder and modified the program until the mechanism worked consistently. We then ran short tests with the powder in funnel, to ensure that the Servo arm rotates smoothly and that the powder releases in the proper amounts. During our most recent test, the Servos did not run properly, which we attributed to the Servo being broken. Team Up, Up, and Away Page | 14 B.O.S.S. – Balloon-Operated Seeding System STAIR TEST WHIP TEST DROP TEST RESULTS SERVO / SALT RELEASE TEST Team Up, Up, and Away Page | 15 B.O.S.S. – Balloon-Operated Seeding System ELECTRONICS TESTING: ACCELEROMETER : The accelerometer measures acceleration in three different axes, in order to determine the acceleration that the satellite experiences during flight. It is important that the sensor is originally calibrated from a level surface, so that all of the readings are accurate. The accelerometer is programmed to reset to its calibrated level each time it is turned on to ensure that the readings are not skewed. To test that the program works, we held the accelerometer flat against the table and then rotated it by 90 degrees every 10 seconds. Test Results: The accelerometer responded as expected. Shown below are the graphs results. For each test, one axis (of X, Y, or Z) recorded 1G of acceleration the other two rested close to zero. We attribute the error noticed in the second and third axes not experiencing exactly zero Gs of acceleration to human error in handling the accelerometer. 1.5 1 Accelerometer 0.5 AccelX (g) 0 -0.5 1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96 101 AccelZ (g) -1 -1.5 AccelY (g) Time (seconds) HEATER: We put the heater through a series of tests: a) We plugged the batteries into the system and make sure that the heater turned on b) We left the heater in an unplugged microwave for 1 hour, to ensure that the heater will not burn out or overheat in an enclosed space. Test Results: The heater has turned on every time and actively heated the space without burning out. To improve the system for flight we added an LED to the heater system to indicate when the system is active. We have tested the LED with the heater system, and both work consistently. The primary cause for failure of BalloonSats is heater failure. In order to know for sure that the heater meets its requirements, we need to: c) Incorporate the heater in the cooler test (for 2 hours) to ensure that it will still perform, and keep the inside of the box above -10 degrees Celsius during flight. CAMERA: In order to test the functionality of the dual-camera system, we turned the system on for a full two hours, to simulate the duration of the actual flight. For this time, the BalloonSat was left on a table undisturbed. The digital camera took pictures every 10 seconds and the GoPro filmed for the entire two hours. The cameras recorded to their respective SD cards, and data was uploaded to the computer. Team Up, Up, and Away Page | 16 B.O.S.S. – Balloon-Operated Seeding System Results: We found that we need to watch the length of time we press the GoPro record button. If held for too long the GoPro went to picture mode, and did not record video. Other than that the cameras and memory cards operated correctly during the test. Below are a series of pictures that the camera took from inside the box during one of our meetings. HUMIDITY SENSOR: We exposed the humidity sensor to varying humidity levels by breathing on the sensor and noting the change. Next we tested the sensor over a period of days to see how it compared to the outdoor humidity. Results: The humidity sensor works and is consistently within 10% of the humidity read online. The spike on the graph below is from breathing on the sensor. Humidity Test (%) 1 13 25 37 49 61 73 85 97 109 121 133 145 157 169 181 193 205 217 229 241 253 265 277 289 301 313 325 200 100 0 Humidity (%) Time (seconds) TEMPERATURE SENSOR (DIGITAL AND ANALOG ): We first tested the temperature sensors by holding them in a clenched fist and releasing them to see if they detected a change in temperature from the heat provided by our hands. The sensors will be tested again three times each before the flight. Note: The digital sensor will be placed inside the satellite so it only needs to be accurate to -15 degrees Celsius, and may not work as well in the freezer. The analog sensor, however must work in the freezer since it will be detecting the temperature outside of the satellite. Results: We found that each of the digital temperature sensors worked and responded to outside stimuli. We then tested their accuracy by exposing the sensors to known temperatures, including room temperature (20 degrees Celsius), refrigerator (0-4 degrees Celsius), and freezer conditions (-5 to -15 degrees Celsius). To ensure that the final readings were accurate, we waited for the Team Up, Up, and Away Page | 17 B.O.S.S. – Balloon-Operated Seeding System readings to stop fluctuating, allowing the output to level out to a constant number. We then repeated the tests at these three temperatures to make sure we got consistent readings. The results from one test are shown in a graph below. We found that one sensor is far more responsive than the other, but both give very similar readings to each other after approximately 15-20 minutes. We will put the more responsive sensor on the outside of the satellite. PRESSURE SENSOR: The pressure sensor was set up with a tube to allow for a lower pressure to be created by sucking the air out of the tube like a straw. Pressure (Kilopascals) Results: When left to measure the pressure of the surrounding air, the pressure was a consistent 1.74 kPa. When we sucked air from the tube, we were able to obtain lower pressures as shown in the graph. The pressure sensor test was successful. 2 1.5 1 0.5 Pressure vs. Time <- Here is where we sucked air from the tube 0 1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 55 58 61 64 67 70 73 76 79 82 Time (seconds) Team Up, Up, and Away Page | 18 B.O.S.S. – Balloon-Operated Seeding System Read Out (Volts) ANEMOMETER: The Anemometer measures wind speed on the outside of the BalloonSat. We tested the anemometer system by attaching a voltmeter to leads on the anemometer and driving around at different speeds. With the voltmeter data, we recorded the speed to determine the speed of the wind. We collected a lot of data ranging from speeds of 0 to 38 kph. 20 Anemometer Test 10 0 0 -10 50 100 150 Speed (Kilometers/hour) We derived this equation based on collected data: kph=(2.0244+8*voltage)/0.1468 Note: Wind readings less than 13 kph will not be accurate. This is an acceptable constraint because our goal is to detect change in wind speed and analyze data (which we expect to be higher than 20 kph for most of the flight). SYSTEM TESTING: COOLER TEST: The cooler test was attempted with too little dry ice. The temperature did not decrease on the outside (as expected) and the inside reached 45 degrees Celsius at the location of the internal temperature sensor, which was located close to the heater. Instead of running the dry ice test again, we conducted a series of freezer tests. The graph on the following page shows results from a test run with 9 volt batteries for 30 minutes. The Arduino worked the whole time, but the heater did not. The inside temperature fell nearly as fast as the outside temperature did. From this test we learned that the outside temperature sensor needs to be farther away from the outside of the box (more than an inch), or it cannot accurately read the temperature. From previous tests we know that the digital temperature sensor should not take half an hour before it starts leveling out to the correct value. We also learned that we would need to closely monitor battery voltage. The heater died soon after being powered on because the batteries did not start at 9 volts. Team Up, Up, and Away Page | 19 B.O.S.S. – Balloon-Operated Seeding System 40 Inside and Outside Temperature vs Time for Pre-Launch Freezer Test 30 20 10 OutsideTemp (Deg C) InsideTemp (Deg C) 0 -10 1 91 181 271 361 451 541 631 721 811 901 991 1081 1171 1261 1351 1441 1531 1621 1711 1801 Temperature (degreess Celsius) 50 -20 -30 Time (seconds) A few alterations were made to the BalloonSat, and then several more freezer tests were conducted. Similarly, the tests lasted 30 minutes and the BalloonSat was placed in the freezer. After several tests, we found that we were only able to collect 10 minutes, 7 minutes, and 24 seconds of data, along with dozens of blank data files. At this point, we found that battery on the sensor Arduino was dropping in voltage very fast. The battery consistently dropped 2 volts in a time span of less than 10 minutes, which was a serious problem considering that the Arduino ceased to function when the battery dropped to around 7 volts. We determined that between the initial freezer test and these subsequent ones that an LED had been added as an output from the Arduino. The LED did not have a resistor on it and consumed a lot of power and very fast. Once a resister was added to the system the Arduino ran far more efficiently on battery power. SYSTEMS TEST: We set up the BalloonSat and added salt to the funnels. The box was set on the table to witness the salt dispersal events (we were confident that the temperature sensors worked). The test was run for 30 minutes. The primary goal of this test was to make sure that the power remained stable and the SD cards wrote as expected. This test was successful. The salt dispersed at 20 and 30 minutes and all other data was on the SD card as expected. DEMO MISSION TEST: This test was never run for lack of time and unforeseen power problems. Instead we conducted thorough tests of each system to ensure that they would work for flight. Team Up, Up, and Away Page | 20 B.O.S.S. – Balloon-Operated Seeding System EXPECTED RESULTS: Team Up, Up, and Away expects to record and recover accurate information from all sensors on our satellite. We expect the temperature sensor to detect a decrease in temperature until satellite flies above the ozone layer, where the measured temperature will increase due to solar radiation (Figure 1). The same trend will be observed after balloon burst, however it will be opposite and compressed horizontally (along the axis measuring altitude). In regards to the anemometer, we expect the wind speed to vary during ascent and descent (as show in Figure 2), due to unpredictable air currents. We predict that the air pressure will decrease during ascent at a steady rate, and then increase again upon descent. This trend is due to a decreasing amount of molecules in the surrounding air as altitude increases (Figure 3). We predict humidity will follow a similar trend to temperature for the same reasons, however would level off before burst unlike temperature. Next, regarding the accelerometer, upon ascent we expect, one G (9.8 m/s2) in the y-direction and zero degrees in both the x and z-directions, with small variances in all three directions due to unknown factors such as wind. Upon descent, however, the G-force in each direction will vary erratically as a result of an unpredictable and turbulent descent. Lastly, we expect the cameras, both the GoPro and the Canon, to take clear pictures and video throughout the flight. The GoPro will be focused on confirming the release of our sodium chloride powder. Another aspect of expected results is how we predict our mechanisms, namely our Servos, to function throughout the flight. Presuming the connections are stable, and the tests which confirm this are conducted accurately, all mechanisms should properly perform their specific functions. Post-flight confirmation will be made through GoPro video of the release. By means of ground testing, the results we expect to confirm after flight have been justified. Primary structural testing (including drop, whip, and stair tests) has confirmed the integrity of our design and its overall reliability. Through physical observation by a number of team members and also close documentation with the GoPro, this has been verified. The ensuing electronics testing was also successful in supporting our predictions. Each sensor has been tested and re-tested multiple different times, precisely calibrated, and will allow for accurate data retrieval from the flight. These graphs are used from one of Carolyn Mason’s high school rocket projects. Figure 1 (Temperature vs. Altitude) Figure 2 (Wind Speed vs. Altitude) Figure 3 (Air Pressure vs. Time) Team Up, Up, and Away Page | 21 B.O.S.S. – Balloon-Operated Seeding System Data recorded at this stage is partially representative of the data we expect to see recorded during flight. Similar to what the temperature sensors recorded when placed in the freezer, we expect to see a steady drop in internal and external temperatures during flight. Data recorded for humidity is representative of the sorts of ranges of data we expect to see during flight, though the graph below shows fluctuations whereas we expect to see a steady drop in humidity during flight. LAUNCH AND RECOVERY: Launch Day Plan: On launch day, Team Up, Up, and Away will meet at 4:30 at the parking garage located on the South east corner of Colorado and Regent Drive. All members will ride with Cameron Coupe or Ty Bailey to Windsor, Colorado. Upon arrival at the launch site we will run through the following checklist to verify that the satellite is ready for flight. 1. 2. 3. 4. 5. Satellite has Canon camera secured in the viewing position Satellite has GoPro camera in the viewing position Three new 9volt batteries are installed to the heater The Heater produces heat when switched on One fresh 9volt battery is given to both Arduinos and both LEDs illuminate when switched on 6. Sodium chloride is placed in the funnels 7. Steps 1 through 7 shall be completed at least by 6:20am 8. At 6:40am Cameron Coupe will hold the satellite while Trevor Arrasmith turns on the heater 9. Trevor will turn on the Go Pro 10. Trevor will turn on the Canon camera 11. Trevor will turn on the Arduinos 12. Carolyn Mason will verify that steps 8 through 11 have been completed 13. Samuel Frakes will verify that steps 8 through 11 have been completed 14. Cameron will then wait for further instructions from Chris until launch The recovery team will include all team members. In the event that only one person can go on the recovery, that person shall be Ty Bailey. Upon recovery, Ty shall cut the tape from the top panel of the cube and remove the SD cards from both cameras and the SD card from the Arduino UNO. We will ensure that duplicates of all files are saved, including pictures, video, and flight data. The memory shall be downloaded to both Trevor’s laptop Carolyn’s laptops. This method has already been tested by downloading two complete sets of camera data and flight data from all sensors to both Trevor and Carolyn’s laptops. Team Up, Up, and Away Page | 22 B.O.S.S. – Balloon-Operated Seeding System Actual Satellite Launch Events: Power on: 7:08 AM Launch Windsor Colorado: 7:10 AM Apogee (Balloon string was cut): 8:57 AM Balloon Landed: 9:30 AM (extrapolated from EOSS data, shown below) Recovery in Nebraska: 12:13 PM Arrived Home: 5:15 PM Flight time to apogee: 1 hour 47 minutes Average ascension rate: 326 m/min Max Height: 30308.7 meters Balloon altitude data supplied by EOSS: 35000 Altitude vs. Time for Balloon Flight Altitude (Meters) 30000 25000 20000 15000 10000 5000 0:00:00 0:19:25 0:24:58 0:29:36 0:33:25 0:37:06 0:40:55 0:44:36 0:48:25 0:52:55 0:56:55 1:01:06 1:05:25 1:09:55 1:13:36 1:18:06 1:22:36 1:26:36 1:30:36 1:34:55 1:38:36 1:42:55 1:47:36 1:51:25 1:55:36 1:59:25 2:03:06 2:07:06 2:10:55 2:14:55 2:18:36 0 Time (hours: minutes: seconds) Following page: On the left is a picture from the balloon tracking station a minute after the balloon was cut. The green dots show the path of our balloon and satellite. On the right is a picture of our box lying in a corn field in Nebraska. The structure was intact with no major damage. The funnels stayed in place and there was minimal salt spillage around the box. The structure is in flight-ready condition. Team Up, Up, and Away Page | 23 B.O.S.S. – Balloon-Operated Seeding System RESULTS, ANALYSIS, CONCLUSION : Results: Structure: o The structure held up to expectations o All internal components except the Canon camera maintained their correct positions. The Canon camera was shaken loose after apogee. Sensor Arduino: o Collected data during flight: 7:08 AM- 9:08 AM o Turned on again once landed: 10:20 AM- 12:13 PM o All sensors functioned at expected Servo Arduino: o Ran from 9:07 AM to 10:37 AM o Data shows that both Servos functioned. We found however, that only the first Servo was actually able to open and release the sodium chloride. Power: Voltage for Start and End of Flight Start (as End Functions after flight? labeled) Sensor Arduino 9 8.3 yes Servo Arduino 9 8.02 yes External Power for Servos 6 2.35 no Heater 9 8.16 yes 9 8.16 yes 9 8.16 yes System The power readings after flight show that all 9 volts retained charge very well. The Arduino needs a solid 7.5 volts to function properly and all 9 volts remained above 8 volts. The external Servo battery was the only one to drop significantly. The second Servo failed due to the Team Up, Up, and Away Page | 24 B.O.S.S. – Balloon-Operated Seeding System quick voltage drop. Each of the Servos runs on 4.8 to 6 Volts. The remaining 2.35 volts is not enough to power a Servo. Graph Analysis: The sensor Arduino ran for the first two hours of flight. To better understand why the Arduino powered off for an hour and then back on, we recreated the accelerometer and temperature graphs for the full flight. We also compared our data with teams who collected data for the whole duration of flight, to confirm our analysis. Below are graphs and explanations for all of our sensors along with the Servos. Accelerometer Data: Wind Gust The accelerometer sensor successfully showed fluctuations in axis orientation confirming three events in our timeline (launch, apogee, and pick up). Launch occurred two minutes after all systems were powered on. This can be seen when the axis orientation spikes from negative to positive. Apogee (burst) occurred 1 hour and 47 minutes after launch. As expected, the accelerometer gave sporadic readings when the balloon string was cut and the BalloonSat got whipped around. About ten minutes after apogee the Arduino stopped taking data. An hour later as the Arduino turned back on, we can see immediate fluctuations. Team Up, Up, and Away Page | 25 B.O.S.S. – Balloon-Operated Seeding System The balloon landed at 9:30 (as per the EOSS graph above), but at 10:20 there is a spike in accelerometer readings. From the data, it appears that the satellite was jolted and a faulty connection became solid again. All of the teams have a fluctuation at this point. There are two theories; either someone moved the satellites or a large gust of wind dragged the parachute and balloon string along the ground. While recovering out BalloonSat, we observed highly windy weather. A town nearby, Imperial, Nebraska, recorded winds from the south at 27 mph with gusts up to 36 mph. It therefore makes sense that at 10:20 a large gust of wind took hold of the parachute and dragged the string of BalloonSats along the ground. At the very end of our recorded data, just before the satellite was powered off, there was fluctuating data due to the satellite being picked up from the ground and being held. While the fluctuations were useful for indicating event times, the numbers the accelerometer read were not as expected. We expected to see the accelerometer read between -3 and 3 Gs (per Triple Axis Accelerometer Breakout - ADXL335 spec), not between -4 and 8.5 Gs. This random offset occurred several times during testing, but never to this degree. This may have occurred because the sensor got jostled during launch. Further analyzing the axis orientation, we can see how the accelerometer thought the satellite was orientated during flight (note: the accelerometer was upside down. The program accounted for this so when the BalloonSat is right-side-up, we expect a -1 G for the Z axis): Launch Apogee Pick Up The launch orientation was as expected. The accelerometer was mounted upside-down on the ceiling of the BalloonSat. The Z-Axis should read -1 and the X and Y should be around zero. The interpretation of the rest of the data is not as straightforward. The data for the flight of the balloon is non-linear, with large perturbations. There are evident spikes in the data. The spikes in recorded acceleration show where the satellite was jostled and whipped around by high and turbulent winds. We know that the recorded pick-up orientation is incorrect because we took pictures of the BalloonSat on the ground in a particular orientation (shown on the following page). If the readouts in this section were shifted up by 2.5 Gs (Y and Z at zero), we would see the correct orientation. Likewise, the apogee orientation would make more sense if X and Y were Team Up, Up, and Away Page | 26 B.O.S.S. – Balloon-Operated Seeding System around zero and Z was negative. If this were the case at apogee then the satellite would be the same as at launch. Another theory, at least for pick up orientation is that the satellite was on a different side, when a gust of wind filled the parachute and drug the string of satellites along. At this point our second Arduino got jostled, powered on (due to the program re-se the axis to zero), then came to rest as shown. An axis reset would case confusing data such as what we saw, so this is likely to be the source of this error. Team Up, Up, and Away Page | 27 B.O.S.S. – Balloon-Operated Seeding System Temperature Data: Tropopause Tropopause Team Up, Up, and Away Page | 28 B.O.S.S. – Balloon-Operated Seeding System The temperature sensors both worked as expected. The outside temperature sensor dropped to -54 degrees Celsius at the tropopause and got warmer up until apogee. After apogee the temperature decreased again as the satellite fell through the stratosphere. Our temperature data shows that the inside temperature sensor remained above -3°Celsius, proving that the heaters were functioning for the first two hours of flight. We compared our data with Team #6, to fill in the gaps of our missing data. We found that the data we collected was consistent with theirs. We also helped piece together our flight timeline with this graph, determining a clear point where the BalloonSat hit the ground. We compared this again with the EOSS data and concluded that the balloon landed at 9:30. Pressure Data: The pressure results were as expected; increasing altitude resulted in decreasing pressure. There is a clear switch in direction of the change in pressure at apogee, after which the pressure begins to rise rapidly. The pressure after apogee was the inverse of the trend during ascent, though at an increased rate since the satellite was falling much faster than it had risen. During the turbulent descent, the Arduino stopped recording data. It was not until after landing that the Arduino resumed recording data, at which time it recorded a pressure of 1.87 kilopascals. Because this data was recorded in Nebraska, at a lower altitude than the satellite was launched at, this higher pressure reading matched our expectations. Team Up, Up, and Away Page | 29 B.O.S.S. – Balloon-Operated Seeding System Humidity Data: Cloud Layer The humidity sensor recorded data as expected. As pressure and temperature decreased, humidity also decreased. Although humidity does not have a direct correlation with altitude, we generally expected humidity to drop as the balloon rose. The exception to this is when the balloon passed through the cloud layer. We witnessed this at 1500 seconds (25 minutes). From launch until around 1500 seconds, the humidity dropped constantly. At 1500 seconds the humidity began to increase. We have GoPro confirmation that the satellite goes through dense clouds at this point. Below is a screenshot of the GoPro footage as it enters the cloud layer. Team Up, Up, and Away Page | 30 B.O.S.S. – Balloon-Operated Seeding System All systems were powered on two minutes before launch, so the 27 minutes indicated by the clock was actually 25 minutes into flight. There are two reasons humidity began to rise. At 2000 seconds (33 minutes) the balloon reached the tropopause and temperature began to rise. On the basis that increased temperature correlates with increased humidity, we attribute the gradual rise in humidity to the gradual rise in temperature seen in the stratosphere. After apogee, we saw the reverse of this to be true as the satellite fell back through the stratosphere, during which time temperature was steadily decreasing until the satellite re-entered the troposphere. Wind Voltage Data: Reentry to thicker air Spinning fast after launch Air too thin to get data Team Up, Up, and Away Page | 31 B.O.S.S. – Balloon-Operated Seeding System The anemometer collected data, though was not what we expected to see. We expected to see a trend that correlated with the jet stream and get a trend more like the following image, graphed by wind speed up to 25 kilometers per hour over a time period of approximately one hour. The recorded voltage readings showed a spike at the very beginning and another larger spike approximately 10 minutes after apogee. Because there was a great deal of turbulence after apogee, not all recorded voltage can be attributed to wind speed, as the satellite was rotating quickly and thus would get inconsistent readings from the variations in orientation. There are two theories for the absence of measurement between 1900 seconds and 6600 seconds. The first theory is that the anemometer became stuck during ascent and stopped reading after 25 minutes, but then after burst became free and started collecting data again. This explanation is unlikely, since the paperclip through the flight tube was the only possible source of jam and we determined that nothing could have caused it to shift this drastically during flight and then return to its original position before landing. The more probable explanation is that air density as the satellite exited the troposphere and entered the stratosphere simply became too low to have enough force to turn the blades of the anemometer. This theory is backed up by the fact that we saw data begin to be recorded once more approximately 10 minutes after apogee, when the satellite was falling at a much faster rate than it rose, and it began to re-enter the thicker atmosphere. Team Up, Up, and Away Page | 32 B.O.S.S. – Balloon-Operated Seeding System Comparison Graph for Air Pressure and Wind Voltage: Based on calibrations prior to flight, we used the following expression to relate recorded voltage from the anemometer to the speed of the satellite: ((8*windVolt+2.0244)/0.1468). Below is the voltage data converted to wind speed in kilometers per hour. The absence of data in the middle section is caused by inaccuracies of the anemometer below 13 kph. During this period, wind speeds could have ranged from 0 to 13 kph, but no useful data was recorded. Team Up, Up, and Away Page | 33 B.O.S.S. – Balloon-Operated Seeding System Servo Data: Team Up, Up, and Away Page | 34 B.O.S.S. – Balloon-Operated Seeding System The first of the two release systems was successful in dispensing the sodium chloride. The time of release corresponded closely with typical cloud seeding altitudes. At approximately 19.5 minutes into flight, which was at an altitude of between 14,000 and 15,000 meters, the salt was released out of the satellite, as shown in the picture on the previous page. This proves the feasibility of a balloon-mounted cloud seeding device, since Team Up, Up, and Away successfully dispersed a cloud seeding particle substance at the proper altitude. The release of salt from the second Servo was unsuccessful due to a power failure caused by the first Servo being unable to reposition itself fully to its zero-position. This drained charge quickly from the battery, causing the battery to be unable to provide enough power to the second Servo at its release time. This jam was confirmed through the sound recorded by the GoPro, and by the fact that the Arduino correctly prompted the second Servo to open but it remained closed. FAILURE ANALYSIS SUMMARY: What failed: • Servo 2 did not open. • Both Arduino 1 and 2 stopped recording data for a given time. Why it failed: • The battery supplying power for Servo 1 and 2 lost power during flight. • Loose wiring during descent caused power supply failure. How we know: • After recovery the power supply to the Servos had dropped from 6 volts to 2.4 volts • Determined from the GoPro audio, Servo 1 was stuck and drained power from battery by trying to re-position itself • Both Servos worked properly when given new power supply • During descent we had small, zero-second files indicating power supply shorts • Power came back to the Arduinos after descent • All switches were still on at recovery and batteries could supply power • Other teams recorded their Arduinos working in cold temperatures, so failure due to cold internal temperatures is ruled out Team Up, Up, and Away Page | 35 B.O.S.S. – Balloon-Operated Seeding System READY FOR FLIGHT: Upon retrieval of the BalloonSat (B.O.S.S.), Team Up, Up, and Away was pleased to find that B.O.S.S. was completely intact with no dents or cracks, and power to both Arduinos was still running. Though an error occurred with our second Servo, our programming has been retested and uploaded again in order to make a second mission possible. Besides the Canon digital camera coming dislodged mid-flight, everything held in place. Moreover, once the batteries are replaced, the salt is refilled, and the cameras charged and their SD cards cleared, Team Up, Up, and Away is fully ready for a second flight. Nothing in the BalloonSat is particularly time-sensitive all systems should remain functional for the foreseeable future, provided that all electronics and structures remain undamaged. CONCLUSIONS: We conclude that cloud seeding could be done from a large-scale balloon-mounted seeding system. Despite the failure of one of our Servos, the mechanism for the salt release worked. We were also able to recover our payload and return it in working condition in less than 10 days. One large concern with cloud seeding from a balloon is that it is very difficult to control where the balloon flies and lands, as evidenced by the fact that our satellite landed in Nebraska. An improved system of retrieval should be a major focus for future missions. LESSONS LEARNED Lessons that we learned while making our satellite include learning to ask for outside help and discovering the fabulous resources available on campus. We learned to make a rigorous test schedule and to try to make these test follow some sort of logical order. An example of this is testing each component one at a time instead of putting them all together and then trying to back out the problem. We learned that LEDs need resistors based on a night of trouble shooting from quick power drainage. Most importantly all of the team members gained confidence to be able to tackle seemingly impossible tasks. MESSAGE TO NEXT SEMESTER: This class will be one of your most memorable classes of all time. You are building a satellite, which you most likely have never done before. Are you nervous yet? You should be and if you are not, let us repeat...you will be making a fully functional satellite, on your own, in less than 12 weeks! Well you will not be entirely alone. Tim May is a great resource for electrical troubles and all the folks at Space Grant are invaluable resources for everything satellite related. The number one secret to success in this class is to plan ahead. You will encounter several problems along the way that you could not possibly have foreseen and the best way to deal with these setbacks is to have left room for failure. Finally, be creative and keep your mission simple. Team Up, Up, and Away Page | 36 B.O.S.S. – Balloon-Operated Seeding System Sources Cited: 1. "Common Cloud Names, Shapes, and Altitudes." http://nenes.eas.gatech.edu/Cloud/Clouds.pdf 2. "Hygroscopic Cloud Seeding." http://www.justclouds.com/hygroscopic_cloud_seeding.asp 3. "Does cloud seeding work?" http://www.scientificamerican.com/article.cfm?id=cloudseeding-china-snow 4. "Why won't the UK make the sun shine for the Olympics" http://www.bbc.co.uk/news/uk-politics-18817945 -END- Team Up, Up, and Away Page | 37