Designing a space debris removal mission targeting a Cosmos
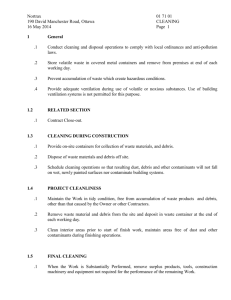
advertisement

Designing a space debris removal mission targeting a Cosmos 3M rocket body in LEO using a chemical engine and an elechtrodynamic tether to perform the de-orbiting. Abstract During the past years, several studies have been conducted to depict an image of the current state and future evolution of orbital regions, showing that space debris mitigation is necessary. Amongst others, this led the IADC to develop a series of (passive) mitigation guidelines adopted in a 2007 UN resolution. These studies which evaluate longterm debris evolution have indicated that the debris density has reached such a high level, that there will be an ongoing increase of the number of debris objects, primarily driven by collision activity. This effect will manifest itself mainly in the Low Earth Orbit (LEO) region, due to a combination of high spatial densities, high relative velocities and a large number of object crossings[1]. An analysis of potential collisions enabled the selection of a limited number of large, intact objects imposing the greatest risk for future instability of the LEO environment; in fact, on the long term, the large >10 cm objects will play a more critical role. As they contain such a majority of the mass, they can form the source of giant amounts of new, smaller, debris with a cascade effect[2]. The passive mitigation measures currently used do not suffice as an insurance of a stable debris environment for the next years endangering the future of the space mission not only in LEO and an active removal mission to clean became clearly a necessity. One of the concepts for an active debris removal system (ADRS) consists on using a satellite or an adapted launch vehicle upper stage to enable the collection and de-orbiting of debris elements. The ADRS should be equipped with various subsystems, including a small propulsion system for approaching the debris through a far-guidance orbital maneuver, a tethered space micro-tug (SMT) for performing the close-range rendezvous and a docking system for establishing physical connection with the debris object[3][4]. Approaching the space debris has to be performed using a chemical engine, because it can assure a quick rendezvous with a high-velocity object such as a space debris in LEO. After the debris is grabbed, the object has to be de-orbited and burn into the atmosphere, as in LEO there is no such option like a cemetery orbit. This could be performed either by the same chemical engine or by an elechtrodynamic tether[5]. Factors that should be considered in choosing the de-orbiting approach are the mass of the system (included propellant tanks or additional batteries), time of de-orbiting, control authority over the whole system (satellite + space debris) to avoid collision during the final stage of the mission and the efficiency of the system. In this project, we will use the AGI STK software package to study the difference between the two configurations and eventually reach a decision as to which approach is recommended. Starting Literature: [1] Valery I. Trushlyakov, Matteo Emanuelli, Alexander Ronse, Claudio Tintori; A Space Debris Removal Mission using the orbital stage of launchers, Heinelin “Flight Into the Future” 2011 contest, Moscow 2011 [2] D.J. Kessler & B.G. Cour-Palais; Collision Frequency of Artificial Satellites: The Creation of a Debris Belt, Journal of Geophysical Research, Vol 83, June 1978, Pages 2637- 2646 [3] Trushlyakov V.,Jakovlev M., Shatrov J, Shalay V.V, DeLuca L.T, Galfetti L., Active de-orbiting system of SLC upper stages and spacecraft based on hybrid gas rocket engines, Book of 3-th European Conference on Space Science, Versailles, France, 6-9 July, 2009 [4] Trushlyakov V, Shalay V., Shatrov J., Jakovlev M., Kostantino A., Аctive de-orbiting onboard system from LEO of upper stages of launchers, Proc. “5th European Conference on Space Debris”, Darmstadt, Germany, 30 March – 2 April 2009, (ESA SP-672, July 2009) [5] Claudio Bombardelli, Javier Herrera-Montojo, Ander Iturri-Torrea and Jesus Peláez Electrodynamic tethers for space debris removal, 2010,Technical University of Madrid, Spain Aim & Steps Using a satellite or an adapted launch vehicle upper stage to enable the collection and de-orbiting of debris elements. Investigation on objects that can be tracked and disposed of (size, mass, altitude). Modeling the satellite and space debris. Mission phases: far approach(1), close approach(2), de-orbiting(3). 1. Composition of the system proposed (far approach): satellite (+ tether system + micro tug). 2. Composition of system proposed (close approach): satellite + tether system (20 km) + micro tug. 3. Composition of system proposed (de-orbiting): satellite + tether system (20 km) + micro tug + space debris. How to perform de-orbiting after grabbing? Chemical engine: one or more burns to reduce altitude and provide de-orbiting of the whole system. Elechtrodynamic tether: using the interaction of the magnetic field with a current that flows in the tether, to generate a force to pull down the whole system through the atmosphere to the ground. Compare the result. Accomplished Milestones Investigation on object that can be tracked and dispose (size, mass, altitude). Modeling the satellite and space debris Investigation on object that can be tracked and dispose (size, mass, altitude). Definition of launcher and launch site Initial simulation of the launch Definition of the orbit The identification of the orbital region where the space debris situation is more critical is the starting point of this research. LEO or GEO? 89%of the ~950 operational satellites are either in a low earth orbit (LEO, 300-2000 km altitude) or a geosynchronous orbit (GEO, ~36000 km altitude). Hence, these two regions form the first focus of our selection. Figure 1: Distribution of space debris in different orbits Both have specific characteristics regarding the presence and evolution of space activities, but in the LEO region, satellites and debris elements are quite widely scattered in terms of altitude, inclination and ascending node. This, in combination with the fact that orbital speeds are considerably higher than in GEO, makes both the amount of crossings and the relative velocities of the bodies during these crossings very high. The wide and random distribution of objects also implies that a system of graveyard orbits (as in the GEO case) is not practical. Another critical issue is that manned spacemissions are performed at (low) LEO altitudes, making it essential that the risk of collision is minimized to the greatest possible extent. So, as described in [5], the combination of a higher debris concentration, a large number of crossings and high relative velocities in the LEO region may lead to an exponential growth of debris objects by a future cascade of collisions. Orbital parameters Once the LEO region is defined as a primary target of our investigation, the most critical orbital parameters must be identified to choose a proper target for the mission. Studies were performed for predicting the probability of collision in the next centuries using NASA’s LEGEND model, based on the past and current debris environment. These studies form the basis of further orbital selection [1][4]. The collision probability in the next 50 years is higher at the altitude bands containing the highest fragments concentration caused by the catastrophic events of Fengyun 1c at ~850km and Iridium-Cosmos at ~800km. The critical altitude band is extended to 800-1000 km. Figure 2- Normalized distribution of predicted catastrophic collisions as a function of altitude and spatial density (1). (Distributions, for objects 10 cm and larger, at the end of 2005 and 2205) Higher inclinations (60°-110°) are much more crowded as a direct result of the high number of past and present satellites which use these zones to fulfill their mission goals. The peak between 90° and 100° is due once again to the high amount of fragments of Fengyun 1c. Thus, efforts for actively remove debris should focus on objects in those orbits. Figure 3 - Amount of detected LEO objects per inclination band for 800-1000km altitudes. Results are based on SSN data of October 2010 (using (2) and (3)) and inclination distribution for objects involved in future LEO collisions (4). Unlike the semi-major axis and inclination, no particular trend can be seen in the right ascension of the ascending node (RAAN) of the current debris environment and future collisions. This is due to the oblateness of the Earth, which makes space debris RAAN a permanently evolving parameter. Figure 2: Evolution of debris cloud from Iridium 33 and Cosmos 2251 satellite collision in 2009 (5). Image (a) shows the situation at the time of the collision, (b) depicts the orbits of the various debris objects 6 months later. Figure 4 - Amount of detected LEO objects a function of eccentricity. Results are based on SSN data of October 2010 (2) (3). Definition of the target Using the USSTRATCOM TLE database, which contains the Keplerian elements of all detectable debris objects, a list was made of all candidate disposable debris objects. The data was filtered based on object size and type as well as the most populated orbital regions. When the rocket bodies are counted per type, the distribution in Figure 5 is reached. Figure 5 - Types of rocket bodies in the critical region As it can be seen in the Figure 5, the Russian Kosmos 3M rocket bodies are the perfect candidate for our research due to the large number of bodies in orbit. Figure 6 illustrated the spatial distribution of Kosmos 3M 2nd stage rocket bodies around the globe. The image was taken using the Google Earth program combined with information from the U.S. Space Track catalog and the UCS Satellite Database Figure 6 - Spatial distribution of Kosmos 3M rocket body in LEO The STK software and Space Track database were used to define the low Earth orbit environment according to spatial distribution of Kosmos 3M rocket bodies, as outlined in Figure 7. Figure 7 - Spatial distribution and orbits of Kosmos 3M rocket body in LEO Orbits of 156 rocket bodies are illustrated in Figure 7 with boundaries set at a perigee of 800 km and 1000 km. Only 15 rocket bodies are on an inclination between 0° and 80° (light blue on the figure). On the other hand, for the band of interest (80°-100°), 141 rocket bodies were listed (blue on the figure). The majority of these objects are at an inclination of around 80°. Of all the bodies available, one was arbitrarily chosen as the target of the mission. This body is only chosen to define a representative mission and may change based on future studies. According to the US Space Track catalog, the rocket body is classified as SL-8 R/B 32053. The orbital parameters of this object are summarized in Figure 8 and Figure 9. Figure 8 - Orbital parameters of the SL-8 R/B 32053 object Figure 9 - Evolution of semi-major axis of the SL-8 R/B 32053 object Kosmos 3M Kosmos 3M is a two-stage launch vehicle. It was developed from the Soviet Union's R-14 intermediate range ballistic missile. The rocket, developed by KB Yuzhnoe and manufactured by PO Polyot in Omsk, consists of an R-14 first stage topped by a purpose-built "S3" restartable second stage, developed from scratch. Kosmos 3M is 2.4 meters in diameter, 32.4 meters tall, and weighs 109 tons at liftoff. Its first stage is powered by a 151.5 ton sea level thrust (178 ton vacuum thrust) Energomash RD-216 engine composed of two dual-thrust chamber RD-215 engines. Four graphite vanes extend into the exhaust of the four fixed thrust chambers to provide steering. The rocket uses an upgraded second stage with an RD-219 (11D49) fixed, restartable main engine and a secondary low-thrust on-orbit propulsion system consisting of four steerable thrusters. This feature allows the vehicle to maneuver while releasing multiple satellites during a single mission. The four steering thrusters are fed from two side tanks mounted on the exterior of the stage. Table 1 - Vehicle components (6) Diameter (m) Length (m) Propellant Mass (tons) Total Mass (tons) Engine Fuel Oxidizer Thrust (SL tons) Thrust (Vac tons) ISP (SL sec) ISP (Vac sec) Burn Time (sec) No. Engines Stage 1 2.4 m 21.5 m 81.9 t 87.2 t RD-216 UDMH Nitric Acid/ 27% N2O4 151.5 t Stage 2 2.4 m 6.5 m 18.7 t 20.14 t RD-219 UDMH N2O4 PL Fairing 2.4 m 4.5 m 178 t 248 s 291.3 s 131 s 1 (2x2chmbr RD-215s) 16 t t 303s+176s 350s+350 s 1 fixed main + 4 steering s s 0.5 t Figure 10- Kosmos 3M schematics (6) The first R-14-derived launch vehicles (Kosmos 1 or 65S3) flew from Baikonur Area 41 Pad 15 beginning in 1964. The upgraded developmental Kosmos 3 (11K65) version began launching from the same site in 1966. One year later, the operational Kosmos 3M (11K65M) variant began flying from Plesetsk Northern Cosmosdrome. Baikonur developmental launches ended in 1968, but Kapustin Yar began hosting Kosmos 3M launches in 1973. By 1977, Kosmos 3M had entirely replaced the smaller R-12-based Kosmos 2 launch vehicle. Kosmos 3M launched Tselina-O electronic intelligence satellites, Strela 1M, 2M and Tsyklon military navigation and communications vehicles, Taifun-1 and 2 radar calibration spacecraft, anti-satellite weapon targets, and Tsikada navigation satellites into orbit. Orbital and suborbital R-14 launches boosted BOR space plane tests during the 1980s for the Soviet space shuttle development effort. Other suborbital R-14 missions were performed for the "Vertikal" scientific research program during the 1970s and 1980s. The United Start consortium has marketed Kosmos 3M for commercial missions since the 1990s. Kosmos 3M ranks third among world space launchers with nearly 450 orbital attempts, trailing only R-7 and Thor/Delta. From a peak of 29 launches in 1977, the Kosmos 3M flight rate has declined to an average of 2-3 per year since the mid1990s. Launch vehicle production in Omsk was stopped in 1995, but production capability was retained. Stockpiled rockets have reportedly performed subsequent launches. Kosmos 3M is the only launch vehicle to have operated from all three of the former Soviet launch sites at Baikonur, Plesetsk, and Kapustin Yar. Kosmos 3M is integrated with its payload in a processing building and transported horizontally to its launch pad on a railroad carrier. The rocket and its carrier are erected at the pad about two days before launch. The Kosmos 3M vehicle was last launched in 2010, with a total of about 442 launches. (wikipedia) Figure 11: Installation of Kosmos 3M on the launch pad Figure 12: Kosmos 3M in Omsk Kosmos 3M’s de-orbiting removal justification Considering the size and mass of a Kosmos 3M 2nd stage and the mean value of the orbital parameters seen previously, the orbit of a typical Kosmos 3M 2nd stage was modeled in STK, as illustrated in Figure 13. Altitude: 900km; Inclination: 80°; Propagator: J2M Figure 13: STK model of a typical Kosmos 3M second stage orbit A lifetime analysis was carried out (Figure 14) and the result was that Kosmos 3M can’t decay automatically (limit at 64km) before 25 years, which is a requirement by UN COPUS space debris regulations. Actually, its orbital altitude only decays to 70km in 100 years, limit imposed for the STK simulation. Figure 14 - Limit of decay for the object Definition of launcher and launch site After the definition of the target, the next step is the definition of the launch site and launcher. The choice depends on the target orbit and the availability of a suitable launch vehicle. According to these boundaries, the potential launch sites were shortlisted among Vandenberg (USA - 34°43′57″N 120°34′05″W), Kourou (French Guyana - 5.305°N 52.834°W) and Plesetsk (Russian Federation - 62°57′35″N, 40°41′2″E). The reason why the Baikonur Cosmodorme was not considered as a possible choice, was the possibility that Russia will abandon all facilities for Baikonur and launch all satellites from Plesetsk in the next 5 years, based on news reports. Another important feature of the desired launch vehicle should be the final stage restarting capacity. Our approach is integrating all de-orbiting subsystems onto the upper stage and using the upperstage for propulsion purposes, which requires restartability. Moreover, several maneuvers will be required to reach the target orbit, which will also depend on restartability. Another parameter that affects the choice of launcher, is the amount of propellant capacity of the launcher’s upper stage. The upperstage is required to inject a satellite into orbit and also move our system to the target orbit and back to a LEO orbit for the application of the tether system. As the amount of propellant used in this process will depend on the upper stage itself, the analysis will be done with one upper stage. If the upper stage was unable to perform our mission, a secondary upper stage with larger propellant capacity will be used. Based on all these parameters, a list of active launch vehicles was created, as outlined in Table 1. This list summarizes the polar launch capability, upper stage properties and the availability of a model in STK. Considering all these required characteristics, the Soyuz vehicle with the fregat upper stage was chosen as the prime launch vehicle. The Proton -M launch vehicle with the BreezeM upper stage will be considered as a secondary alternative system. The Plesetsk cosmodorme was chosen as the launch site for both vehicles. The Plesetsk cosmodrome is a military site in the NorthWest Russia at some 800 km from Moscow. Figure 15 - Plesetsk Cosmodrome (6) Table 2 - Launch vehicles and launch sites (6) Upper Stage Launch Vehicle Country Dnepr-1 Ukraine Zenit PEO characteristics Payload (kg) Launch Site Dimensions (m × m) Dry Mass (t) Propellant Mass (t) Total Lift-off mass (t) Restar table STK model? 1,91 4,26 N Y - 89,9 N Y 36 40 N N 35 39 N N Solid - 0,98 N Y 0,126 Solid 0,771 0,897 N Y Propulsion RD-869 (UDMH-N2O4) (KeroseneLO2) YF-22 B (UDMH-N2O4) YF-22 (UDMHN2O4) 800 km, I = 87.3 400 Baikonur 1*3 2,35 Russia 200 km, I = 99 11380 Baikonur 10.4 * 3.9 8,3 CZ-2D China 200/400 km, I = 90 2750/1175 JSLC 10.4 * 3.35 4 CZ-2C China 600 km, I = 90 800 JLSC 7.5 * 3.35 4 Taurus-XL US 400 km, I = 98 880/1050 VAFB 2.1 * 0.97 Minotaur US 740 km, I = 98.6 335 VAFB 1.34 * 0.97 800 km, I = 98.2 580600/740 VAFB 1.34 * 0.98 Solid 0,77 0,893 N Y 5,444 5,98 N Y 9,7 11 Y Y 12,5 14,7 Y N 2 2,92 Y Y Taurus US CZ-2E/ETS China 1000km, I = 86 4930 XLSC 2.936 * 1.7 0,541 SPTM-17 (solid) Ariane 5 EU 800 km, i = 98.6 9500 ELA3 3.356 * 3.936 1,25 AESTUS (MMH-N2O4) GSLV India 407 km, I = 51.6 5000 SHAR 8.7 * 2.9 2,2 PSLV India 800 km, I = 99.1 1200 SHAR 2.65 * 1.34 0,92 Delta-4H US 500 km, I = 90 21700 VAFB 13.7 * 5.13 3,49 2.850/ 3.490 Delta-4M US 500 km, I = 90 7350-11700 VAFB 12.2 * 4.07 or 13.7 * 5.13 Delta-2 US 833 km, I = 98.7 1591-3186 VAFB 5.88 * 2.44 0,95 ATLAS 2, 2A US 185 km, I = 90 5510-6170 VAFB 10.06 * 3.05 1,84 ATLAS 5 US 189 km, I = 90 9050-10750 VAFB 12.68 * 3.05 1.914/ 2.106 CZ-3 China 200 km, I = 90 3000 XLSC 7.48 * 2.25 2 CZ-4 China 900 km, I = 99 1650-2800 TSLC 1.92 * 2.9 1 Soyuz-ST Russia 900 km, I = 90 3850 Baikonur 1.5 * 3.35 1 Vega EU 700 km, I = 80 1580 ELA1 2.04 * 1.952 Soyuz-IkarFregat Russia 700 km, I = 90 3000 Plesetsk Proton-M Russia 170 km, I = 72.7 19975 Baikonur KVD - 1 (LH2LO2) PS-4/L2 (MMH-Mon-3) RL 10B-2 (LH2-LO2) RL10B-2 (LH2LO2) AJ 10-118 K (AerozineN2O4) RL-10A-3-3A or RL-10A-4 (LH2-LO2) 27,2 30,69 Y Y 20.410/27.200 23.260/3 0.690 Y Y 6 6,95 Y Y 16,74 18,8 Y Y RL-10A-4-2 (LH2-LO2) 20.672/20.830 22.586/2 2.936 Y Y YF-73 (LH2LO2) YF-40 (UDMHN2O4) S5-92 (UDMHN2O4) 8,5 10,5 Y Y 14,15 15,15 Y N 5,35 6,535 20 Y 0,418 (UDMH-N2O4) 0,55 0,968 5 Y 2.61 * 2.72 or 1.5 * 3.35 2.352/ 1 UDMH-N2O4 0.3-0.9/5.35 3.29/6.53 5 20 Y 2.61 * 4.1 2,37 UDMH-N2O4 19,8 - 8 Y Y Y Y N 2 N Falcon 1 US 700 km, I = 85 450 VAFB - H-2A Japan 800 km, I = 98.6 4400 Tanegashim 10.7 * 4 Falcon 9 US 900 km, I = 80 7246 VAFB - CZ-3B/3C China 800 km, I = 90 6000 XLSC 12.375 * 3 Soyuz-2 Russia 820 km, I = 98.7 4350/4900 Plesetsk 1.5 * 3.35 1 3 0,3 Proton-K Russia SSO 4600 Baikonur 5.5/6.3 * 3.7 2.500/ 3.370 ROCKOT Russia 800 km, I = 90 1340 Plesetsk 2.61 * 2.5 1,6 Kestrel (RP-1LO2) LE-5B (LH2LO2) Merlin (RP-1LO2) YF-75 (LH2LO2) S5-92 (UDMHN2O4) Kerosene or Sintin-LO2 11DM58 (UDMH-N2O4) 17 20 18,193 20,6 2 Y 5,35 6,535 20 Y 14,8 17.3/18.2 7 Y 4,9 6,5 8 Y Soyuz Launch Vehicle The Soyuz family of launch vehicles is the world’s most successful launch system, with more than 1200 launches and an overall success rate of about 96.8 %. It is based on the R-7 ICBM design and has been in service since 1963. The current operational models are the Soyuz-U, Soyuz-FG, and Soyuz 2. The Soyuz 2 vehicle is planned to replace all previous models by 2014. Hence, we will focus on this vehicle. The Soyuz 2 is a 4 stage launch vehicle, with an overall length of 43.42 m, maximum diameter of 10.3 m and a maximum lift off mass of 311.7 tons. It can launch up to 4.9 tonnes to a sunsynchronous orbit with an altitude of 820 km, inclination of 98.7 degrees from the Plesetsk cosmodorme. Table 3 summarizes some of the characteristics of the soyuz 2 vehicle. Table 3: Soyuz 2 characteristics Stage Length (m) Max Diameter (m) Mass (kg) Engine Engine Mass (kg) Dry Mass (kg) Propellant O/F Isp (sea level) Isp (vacuum) Propellant Mass (kg) Burn Time Thrust (sea level) Thrust (vacuum) Control 1 19.6 2 27.8 3 6.74 Fregat 1.5 2.68 2.95 2.66 3.35 176800 101900 RD-108A (+ 4 verniers) 25200 RD-0110/RD0124 6535 1155 1250 408/480 75 15240 2355 2.47 245 310 6875 Kerosene-LO2 2.39 264 311 2.2/2.6 331 326/359 1000 UDMH-N2O4 1.95-2.1 327 (225 verniers) 156640 90100 21380 5350 118 280-290 230-250 / 300 877 (total) 838.5 * 4 792.68 - - 1021.3 * 4 990.18 245/294 19.6 + 7.8 (verniers) Movable aerodynamic fins and 8 gimballed verniers (deviation angles up to 45°) 4 gimballed verniers (deviation angles up to 45°) 4 gimballed verniers (deviation angles up to 40°) - 4 * RD-107A S5-92 An analysis of Soyuz launches during the last 3 years (2009-2011) was performed using online resources which are summarized in Table 4. Not much data was available about non LEO launches. For launches to the ISS, an elliptical parking orbit was used with an inclination of 51.62-51.68 degrees, a perigee of 189.6-201.2 km, an apogee of 232.41-267.02 km and a period of 88.47-88.87 minutes (7). Table 4: Soyuz launch statistics 2009-2011 (8) LEO/ISS MEO Molniya LEO Sun Synchronous LEO Number of Launches Launch Site 26 4 3 7 Baikonur Plasetsks/Korou Plasetsks Baikonur/ Plasetsks 2 Baikonur/ Korou Payload Mass Minimum Maximum (kg) (kg) 7.1 7.4 0.94 1.414 2 2 3.9 6.9 2.1 2.7 Figure 16: Fregat upperstage mission profile (SSO orbit from Guiana Space Center) (9) Proton Family of Launch Vehicles The proton family of launch vehicles is another successful Russian/Soviet launch system. It has been in service since 1965, with more than 400 launches and a success rate of about 90%. The Proton M vehicle is currently operational and we will focus only on this vehicle. The Proton M vehicle is a 4 stage launch system, capable of delivering 19975 kg to a 170 km circular orbit at an inclination of 75 degrees from Baikonur. It has a length of 57.2 m, a maximum diameter of 7.4 m and a maximum lift off mass of 691.27 t. Table 5 summarizes the characteristics of this vehicle. It should be noted that the Angara launch vehicle family which is going to replace the proton vehicle in the future will be using the same upper stage. Table 5: Characteristics of the Proton M launch vehicle (6) Stage Length (m) Max Diameter (m) Mass (t) Engine Engine Mass (kg) Dry Mass (kg) Propellant O/F Isp (sea level) (s) Isp (vacuum) (s) Propellant Mass (kg) Burn Time Thrust (sea level) (kN) Thrust (vacuum) (kN) Control 1 21.18 2 17.05 3 4.11 Breeze M 2.61 7.4 4.1 4.1 4.1 30.6 RD-253 11.4 RD-0210 3.7 RD-0210 2.37 11 DM 58 1300 566 - 95 UDMH-N2O4 2.69 285 316 - - 2 326.5 326.5 325.5 419410 156110 46560 19800 130 300 250 2320 583 (+31) 19.6 By gimballing four Nozzles By 4 verniers engines (31 kN thrust) By 4 thrusters (396 N thrust) and 12 attitude Control thrusters (13.3 N thrust) 10500 By gimballing six nozzles The proton launches for the last three years (2009-2011) were analyzed for patterns of target orbits. The results are summarized in Table 6. The most detailed data existed for GEO launches by Proton M. It revealed that typically a parking orbit with an altitude of 173 km, an inclination of 51.5 degrees and a RAAN of 9 degrees was used (10). Table 6: Proton M launches (2009-2011) (8) Number of Launches GTO + GEO EEO GTO MEO Launch Site 14 6 1 5 5 Baikonur Payload Mass Minimum Maximum (kg) (kg) 2.73 6.15 2.06 3.672 5.775 5.514 4.245 6.74 4.5 Figure 17: Typical Proton M mission profile (10) Simulation of Launch CHALLENGES Detailed modeling of debris removal satellite (including propulsion subsystems) in STK: Currently STK does not have this inbuilt capability. With the aid of the newly released STK/SOLIS tool, it will be possible to address this challenge. Modeling a tether system using STK with Astrogator and SEET module. References 1. Instability of the present LEO satellite populations. Liou, J.C e Johnson, N.L. 7, 2008, Advances in Space Research, Vol. 41, p. 1046-1053. 2. Chatters, E.P. e Crothers, B.J. Space Surveillance Network. AU-18 Space Primer. 2009. 3. United States Strategic Command: Space Track. [Online] http://www.space-track.org. 4. Collision activities in the future orbital debris environment. Liou, J.C. 9, 2006, Advances in Space Research, Vol. 38, p. 2102-2106. 5. Satellite Collision Leaves Significant Debris Clouds. Orbital Debris - Quarterly News. s.l. : NASA, 2009. Vol. 13. 6. European Space Agency. Launch Vehicle Catalogue. s.l. : European Space Agency, 2004. 7. History of Flights. S. P. Korolev Rocket and Space Corporation (Energia). [Online] http://www.energia.ru/en/archive/launch-book.html. 8. Space Launch Log. [Online] http://www.spacelaunchreport.com/. 9. Soyuz from the Guiana Space Center User's Manual. 2006. 1. 10. Launch Information Processing and Display Center (LIPDC). Khrunichev (KhSC) State Research and production Space Center. [Online] http://coopi.khrunichev.ru/main.php?id=11. 11. Isakowitz, Steven J., B., Hopkins Joshua e P., Hopkins Joseph. International Reference Guide to Space Launch Systems. s.l. : American Institute of Aeronautics and Astronautics, 2004. 12. Characterization of the cataloged Fengyun-1C fragments and their long-term effect on the LEO environment. Liou, J.C e Johnson, N.L. 2009, Advances in Space Research, Vol. 43, p. 14071415. 13. [Online] http://www.satellitedebris.net/whatsup/.