- Surrey Research Insight Open Access
advertisement

Partial volume effects in dynamic contrast magnetic resonance renal
studies
1. D. Rodriguez Gutierreza, 1, ,
2. K. Wellsa, 2, ,
3. O. Diaz Montesdeocab, 3, ,
4. A. Moran Santanab, 4,
5. I.A. Mendichovszkyc, 5, ,
6. I. Gordon, ,
Abstract
This is the first study of partial volume effect in quantifying renal function on dynamic contrast
enhanced magnetic resonance imaging. Dynamic image data were acquired for a cohort of 10 healthy
volunteers. Following respiratory motion correction, each voxel location was assigned a mixing vector
representing the ‘overspilling’ contributions of each tissue due to the convolution action of the imaging
system's point spread function. This was used to recover the true intensities associated with each
constituent tissue. Thus, non-renal contributions from liver, spleen and other surrounding tissues
could be eliminated from the observed time–intensity curves derived from a typical renal cortical
region of interest. This analysis produced a change in the early slope of the renal curve, which
subsequently resulted in an enhanced glomerular filtration rate estimate. This effect was consistently
observed in a Rutland–Patlak analysis of the time–intensity data: the volunteer cohort produced a
partial volume effect corrected mean enhancement of 36% in relative glomerular filtration rate with a
mean improvement of 7% in r2 fitting of the Rutland–Patlak model compared to the same analysis
undertaken without partial volume effect correction. This analysis strongly supports the notion that
dynamic contrast enhanced magnetic resonance imaging of kidneys is substantially affected by the
partial volume effect, and that this is a significant obfuscating factor in subsequent glomerular filtration
rate estimation.
Keywords
Magnetic resonance imaging;
Point spread function;
Partial volume effect;
GFR
Dynamic contrast enhanced magnetic resonance imaging (DCE-MRI) of the kidneys has been
suggested as a possible alternative to radioisotope renography (RR) for estimating differential renal
function (i.e. filtration). In DCE-MRI the injection of DTPA, a pure glomerular filtrate, tagged to
gadolinium (Gd) allows MRI renography to be undertaken. Data is acquired as a function of time and
the distribution of the Gd-DTPA in the kidney reflects different aspects of renal function depending on
the time frame selected for analysis. Whilst DCE-MRI has the same basis as RR, advantages of DCEMRI compared to RR include the lack of ionising radiation, increased spatial resolution and availability
of volumetric data that contains both tracer kinetics and anatomical information.
To date, DCE-MRI and, even RR techniques have failed to robustly estimate absolute glomerular
filtration rate (GFR) when compared to ‘gold standard’ plasma-sampling methods using 51Cr-EDTA or
inulin clearance[1]. Prior work has identified various factors that need to be considered for accurate
quantification of glomerular filtration rate on DCE-MRI. These include movement artefacts [2], the
selection of a suitable region of interest (ROI) for the analysis [3] non-linear relationship between
signal intensity and gadolinium concentration [4] and suitability of the models used to estimate
GFR [5]. Within this area, the effects of image distortions due to non-linear phase from magnetic
susceptibility have thus far been ignored, and these may be significant at the boundary of the kidney
and in particular, for small cortical ROIs. Movement correction is often considered as the first preprocessing step needed for subsequent analysis, as respiratory motion causes kidney displacement
mainly in the cranial-caudal direction. The selection of a suitable ROI for analysis has been reported
as crucial and this has been comprehensively reviewed in the literature [6]. As glomerular filtration is
essentially a cortical function, the common approach is for cortical ROIs to be generated. Whilst all
the aforementioned aspects are recognised as confounding factors on GFR quantification, there has,
until now, been no consideration of the partial volume effect (PVE) in DCE-MRI in the published
literature.
The PVE occurs where the signals from two or more tissues combine to produce a single image
intensity value within a particular voxel. This is a result of the finite bandwidth of the image acquisition
system, occurring mostly near the boundaries between tissues, and is present to a greater or lesser
degree in all imaging modalities. In particular, functional imaging techniques, such as DCE-MRI, offer
relatively poor spatial resolution, often sacrificed for better temporal resolution. The resulting larger
point spread function (PSF), and concomitantly larger voxels (compared to the size of the voxel in the
anatomical areas of interest), are more likely to present significant PVEs. This potentially impacts on
ROI selection, and its interpretation for subsequent GFR estimation. Whether using manual, wholekidney [7] or semi-automated segmentation of cortical and medullary regions [8], the result of these
techniques is the definition of a ROI where every voxel is labelled as either belonging solely to one
particular tissue class (inside the ROI) or not (outside the ROI). In contrast, partial volume (PV)
analysis assigns a set of mixing values to each voxel, representing the corresponding fractional signal
component from various adjacent tissue structures that contribute to the observed voxel signal
intensity. This robustly accounts for the convolution action of the system's point spread function and
the signal mixing this produces in adjacent structures. Whilst there is significant interest in PV for
image quantification of brain data, PV quantification techniques have yet to be investigated for DCEMRI renography. The brain analysis methods can be considered to fall into two basic approaches:
those that utilise probabilistic approaches to infer the most likely tissue composition of a
voxel[9] and [10], or those that utilise a mixing map estimated from anatomical data registered onto
functional data[11].
The aim of the work presented here is to demonstrate the magnitude of the PV effect in DCE-MRI
renography using a method based on the mixing map approach. We propose a method for PV
correction in dynamic DCE-MRI data using anatomical MRI images and knowledge of the PSF of the
particular MRI pulse sequence used to acquire the dynamic data. These are used to calculate mixing
vectors for each voxel within a user-defined ROI and to de-compose the observed intensity for each
voxel into its constituent parts corresponding to the contributions of each influencing tissue. We
assessed the PV effect using the Rutland–Patlak approach to estimate GFR.
1. Materials and methods
1.1. Overview of the methodology
This approach employs several pre-processing steps before a relative measure of GFR can be
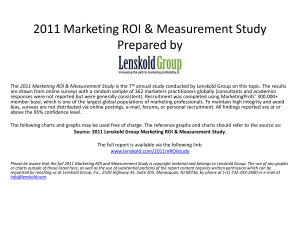
undertaken, whether using PVE analysis or not. Fig. 1 provides a schematic diagram of the flow of
data processing used in the methodology, the most significant aspects of which are described in the
ensuing sub-sections detailed below. The method was applied to DCE-MRI data obtained from
scanning a cohort of 10 healthy volunteers on a 1.5 T Siemens Avanto scanner running a syngo MR
2004V 4VB11A platform. Each human volunteer was first scanned using a true-FISP pulse sequence
to acquire breath-hold anatomical data. This 2D data consisted of 18 slices with 7.5 mm thickness (no
gap), an in-plane voxel dimension of 1.56 mm × 1.56 mm, TR = 3.34 ms, TE = 1.67 ms and an
acquisition bandwidth of 590 Hz/pixel. Oblique-coronal DCE-MRI data volumes were then acquired
using
a
SPGR
3D-FLASH
Volumetric
Interpolated
Breath-hold
Examination
(VIBE)
with
TE/TR = 0.53/1.63 ms, flip angle = 17°, acquisition matrix = 128 × 104, 400 mm × 325 mm FOV and
1500 Hz/pixel bandwidth. This dynamic image data were acquired every 2.5 s over a period of several
minutes, with each dynamic dataset consisting of 3D volumes with 18 slices of 7.5 mm thickness (no
gap) and an in-plane voxel dimension of 3.1 mm × 3.1 mm. The in-plane voxel dimension was
deliberately set to be twice that of the anatomical data for reasons given below. The dynamic data
was then motion corrected[12]. The anatomical and dynamic scans were optimized (18 slices) to
ensure full coverage of the kidneys in all volunteers, regardless of the kidneys’ dimensions,
anatomical position or spatial orientation.
Fig. 1.
Flow chart showing the main processing stages used in the PV correction method.
The anatomical data (from the FISP sequence) were manually segmented, under clinical expert
guidance, into a set of binary tissue templates including kidney, liver, spleen and background, as
illustrated in Fig. 2. Our definition of ‘background’ represents any voxel signal emanating from a signal
that is neither kidney nor spleen/liver. Each tissue template was then convolved with an
experimentally determined 3D PSF representing the intrinsic impulse response of the dynamic SPGR
3D-FLASH (VIBE) pulse sequence used for dynamic acquisition (details of the experimental PSF
phantom work appear below, illustrated in Fig. 3)[13]. This produced a blurred representation of the
spatial influence of each functional tissue class, with values in the range [0, 1]. Superimposing each
convolved template onto the corresponding organ position in the original anatomical image produced
a mixing map representing the action of the PSF on the functional data. Where the blurred templates
overlap, the relative magnitude of each overlapping contribution in each voxel describes the relative
signal contribution from each adjacent tissue class to the observed intensity. Where there is no
overlap in the templates, then the voxel may be considered to be a pure voxel, representing functional
information from only a single tissue class. Thus mixing vectors were assigned to each voxel, with
mixing vector components representing the fractional contribution of the adjacent tissues to the
observed voxel intensity. Mixing vector components of less than 1% were truncated to zero. Note that
in this work, in common with other PV correction methods and compartmental models of the kidney,
we make an assumption of instantaneous mixing as well as a spatially invariant time–intensity
distribution for each single tissue type.
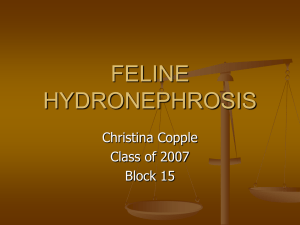
Fig. 2.
(Top row) Tissue templates overlaid on anatomical MR data on left. The right image shows the large
rectangular ROIs used in the latter part of the analysis, and a colour-coded representation of the number of
tissues contributing to each voxel (with contributions >1%). Voxels containing signal contributions from one
tissue are in red, two tissues in green and three tissues in blue. Note this only illustrates the number of tissues
being PV mixed – the overall magnitude of these mixing components is shown in Fig. 4. Nonetheless, this
demonstrates that the kidney/liver and kidney/spleen boundaries, that corresponds to the region most often
used for ROI analysis of kidney function, contains mixtures from three different tissue components. (Bottom
row) Functional image data used to manually define the cortical ROIs used in the analysis. Colour-coding
corresponds to voxels obtained from the above mixing map. This demonstrates the heterogenic nature of PV
mixing in the cortical region. Without PV correction, contamination of the assumed renal signal by the
influence of the surrounding tissue signals would produce significant variation in estimated GFR, dependent
on size and position of the ROI used for analysis.
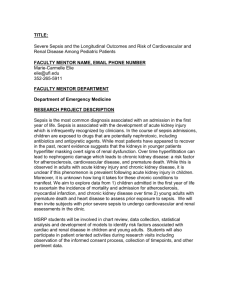
Fig. 3.
Phantom used for LSF estimation (left). Horizontal edges in the black squares labelled ‘a’ were used for
estimating the LSF at 0°, and vertical edges labelled ‘b’ for 90°. The phantom was then manually rotated to
capture the edge in the z-direction. The image on the right is an example of the gaussian–sinc mixture model
(line) fitted to the data.
In order to locate the above mixing map at the correct position within the functional image data, the
functional data were up-sampled to the same resolution as the template/anatomical data. For
registration, a method similar to that previously described [14], based on complex phase-image
correlation, was extended to 3D to allow for through plane motion, and then employed here for each
functional volume. Acquiring the anatomical data at 2× finer voxel dimensions and in the same slice
orientation compared to the functional data allows a simple bilinear interpolation to be used in the upsampling stage. This also provides greater control over locating the mixing map at the correct position
on the functional data, giving the registration potentially sub-voxel functional precision in the coronal
plane, and allows for slice motion to be accounted for. Final placement was checked by visual
inspection. In about half the cases this required a further manual translation of one to two voxels to
improve visually assessed alignment.
Given that the registrations were all manually checked, it is unlikely that any of these were misplaced
by more than one functional voxel volume, particularly as the data had been up-sampled to allow finer
positioning in the final registration. However, to examine this potential source of error, deliberate
misplacement of the cortical ROI by up to two voxels in each of the three orthogonal axial directions
was applied. This produced changes in the mixing components of typically a few percent in individual
voxels, except where the displacement produced a gross mismatch in overlapping regions (in
the z direction), in which case the error was clearly visible.
For subsequent analysis, a cortical ROI was then manually defined using a central kidney slice taken
from the first 160–180 s of the data, as shown in Fig. 2. As the functional images had already been
registered onto the aforementioned anatomic data, then this cortical ROI was also, implicitly, correctly
registered. Using this ROI, observed time–intensity curves could then be extracted. The robustness of
this approach to reproducibly recover PV-corrected time–intensity data has also been tested by using
an alternative large rectangular ROI for PV analysis that encompasses the entire kidney and contains
significant non-renal contamination. This is described in further detail below.
An arterial input function (AIF) for each volunteer was extracted from an aortic ROI in the functional
data and used in conjunction with Rutland–Patlak analysis [15] to produce an estimate of relative
GFR. The period corresponding to the first 30–90 s after baseline shift of the dynamic data was then
used for Rutland–Patlak analysis, where contrast enhanced PV ‘overspill’ contamination from the
medullary region was considered negligible. PVE-corrected and non-corrected Rutland–Patlak plots
have then been compared for each volunteer.
Details of the preliminary methodology used.
1.2. Estimation of the Point Spread Function
A linear, shift-invariant imaging system can be completely characterised by its PSF, i.e. the system
response to a unit impulse. Since any signal can be described as a series of shifted infinitesimal
impulses, the output of a linear, shift-invariant system can be considered a sum of PSFs, each shifted
to the location and scaled according to the height of the corresponding impulse. Although the linear
shift-invariant imaging system is an idealised concept and is, in practice, never fully realised, many
MR sequences can nonetheless be considered sufficiently shift-invariant to be commonly
characterised by their PSF [16]. In practice, the PSF can be estimated from a set of Line Spread
Functions (LSFs) at different orientations. The LSF is an integrated profile of the PSF along a given
direction:
…1
where x and y represent orthogonal directions. By measuring multiple LSFs at various angles, the
PSF can be constructed. However, in the case where the PSF is circularly symmetric, a single LSF
orientation may be used to characterise the PSF.
To obtain LSFs, an edge phantom containing perspex blocks (see Fig. 3) was imaged using the same
acquisition sequence as used for dynamic renal volunteer data acquisition as described above. LSFs
were estimated by differentiating edge profiles at 0° and 90° orientation in-plane, and for the zdirection. To minimise the effects of noise and improve sampling, multiple edge profiles along the
edge were co-registered before differentiation. This was achieved by finding the relative
displacement, x′, between two adjacent edge profiles ξp and ξp+1 that minimises the difference
between them:
….2
where xi is denotes the ith location along profile p. Once x′ was found ξp+1 was shifted accordingly and
the same process was applied to the next profile. This resulted in a satisfactorily well-sampled edge
profile that could be successfully differentiated to produce a reliable estimate of the corresponding
LSF profile as shown in Fig. 3.
The sampling of k-space during image acquisition results in a finite set of spatial frequencies being
captured. Thus, it is common in the literature to consider the PSF as a sinc function; that is, the
inverse Fourier Transform of an ideal low-pass filter. However, in addition to this, there are further
filtering effects such as relaxation resulting in exponential signal decay during acquisition. Other
factors that may also contribute to the observed PSF include not only signal decay during acquisition,
but limited bandwidth of acquired k-space data, other low-pass filtering applied on acquisition,
exponential signal decay and magnitude operator on complex Fourier-transformed data and mapping
into an integer interval for image display.
To model these effects, a gaussian–sinc mixture, LSFGS(x), was used to model the experimental LSF
data:
…..3
where bGS, hS, hG,μS, μG, σS, and σG are the fitting parameters
.
This empirical model was fitted to each individual LSF for all three component directions (coronal,
sagittal and trans-axial directions) using iterative least squares. These fittings were performed on
different edge locations within a slice and on different slices of the phantom data and the average
result for each orientation was used to construct a 3D model gaussian–sinc PSF with a resultant Full
Width at Half Maximum (FWHM) of 6.8 mm in the x and y (coronal in-plane) directions and 17.2 mm in
the z-direction. Fig. 3 illustrates the phantom used and the LSF model fit to the data [13].
1.3. Human data acquisition
Oblique-coronal anatomical and DCE-MRI data volumes from healthy volunteers with assumed
normal renal function were acquired on a 1.5 T Siemens Avanto scanner (Siemens Medical Solutions,
Erlangen, Germany) as described above. The cohort consisted of 10 volunteers in the age range 22–
36 years (mean 27.8 years) with weight varying between 46 and 109 kg (mean 74.3 kg). The use of
human volunteers for this study was approved by the local ethics committee.
The oblique-coronal orientation along the long axis of the kidney was used to minimise movement
artefacts due to respiration. The motion in this plane was considered to be dominated by 2D
translation in the coronal plane. However, the motion correction step using a method previously
described [12] considered both 3D translation and rotation, using an assumption of rigid body
behaviour, consistent with other prior work in this area [2], [3] and [12]. The anatomical scan was
acquired as described above. It was followed by the acquisition of contrast enhanced dynamic data
using a SPGR 3D-FLASH pulse sequence (VIBE) as described above. This acquisition protocol was
deliberately designed to encompass both kidneys and aorta, so that arterial input function (AIF) data
could be extracted from a single dynamic renal volume, and moreover, to allow the same acquisition
protocol to be used on volunteers with significantly different internal organ locations and/or body mass
indices.
The Gd-DTPA dose (Magnevist, Schering, Germany) was 0.05 mmol/kg body weight, injected as a
bolus at 2 ml/s using an automatic injector (Spectris). The contrast agent bolus was immediately
followed by a 15 ml saline flush injected at the same speed.
1.4. Template and ROI definition
The anatomic MR data demonstrating major organs (kidneys, liver and spleen) were manually
segmented on all slices that contained kidney tissue, shown in Fig. 2. The higher resolution of the
anatomic data compared to the functional data minimises any subsequent misrepresentation of the
kidney boundary. This might occur, for example, as the kidney is often surrounded by a layer of fat,
which may produce phase-cancellation effects resulting in loss of boundary signal.
The resulting stack of tissue templates for each organ was then convolved with the aforementioned
3D PSF, to define the spatial extent of PSF-induced blurring, and hence PVE signal mixing, described
in further detail in the next section. ROI were difficult to draw on the most ventral and dorsal slices of
the kidneys in the oblique projection where there were relatively small amounts of kidney present.
However, by selecting the central kidney slice for subsequent analysis, the effects of these most
outlier slices on PVE-induced signal mixing was considered negligible.
For subsequent PV analysis, two manually defined ROIs taken from a central slice for each kidney
were used: a cortical ROI as defined by one of the authors (IG) and a large rectangular ROI. To
define a cortical ROI (Fig. 2, bottom row), normally indistinguishable in an anatomic MR image, the
first 50–70 s of the dynamic data following baseline shift were used, demonstrating enhancement of
the cortex by the assumed dominant effect of glomerular filtration, compared to renal perfusion and
tubular enhancement. A cortical ROI (as opposed to a parenchymal one) was chosen for two reasons:
the cortex is the site where glomerular filtration takes place, and, we wanted to specifically select ‘
cortical’ voxels to illustrate the PV effect on filtration estimation. The large rectangular ROIs
considered here consisted of a rectangular abdominal region surrounding the entire kidney and
deliberately encompassing adjacent anatomy (Fig. 2, top right). This was done to test the subsequent
recovery of the true renal signal using the proposed PV correction method as we recognised that the
large ROI contained high levels of signal corruption from PV mixing of adjacent tissue. No attempt
was made to investigate the PV effects from the internal (non-cortical) kidney tissue.
1.5. Data analysis
Assuming linear mixing of the contributing MR signals within a particular voxel, the problem of partial
volumes might be thought of as finding for every voxel ω, a mixing vector, αω:
αω={αω1,αω2,…,αωN}….4
where N is the number of tissue signals contributing to the overall observed signal intensity in a
particular voxel. Thus, the mixing vector describes the contribution of each tissue class j to the
observed intensity of a particular voxel ω, so that:
…..5
To generate the mixing vectors for each voxel location, the structural tissue templates described
above were registered with the movement-corrected dynamic data described above and convolved
with the 3D PSF. The superposition of these convolved templates onto the corresponding anatomical
locations produces overlap at their boundaries, and thus creates a component mixing map or α-map
of individual mixing components αωjfor each voxel location ω. The number of individual components
assigned to each voxel (in this case, from one to a maximum of three) is illustrated by colour coding
in Fig. 2. In this particular work, N = 3, and Eq. (5) is used to calculate the magnitude of the
background mixing component, once kidney and liver/spleen components have been determined from
the overlap of their convolved tissue templates. In this context, the background is defined as the
complement of the kidney and liver/spleen templates, i.e. the group of voxels excluded from the
templates.
Having obtained the corresponding mixing maps, the observed intensity oω(t) for each voxel
location, ω, at time t, within a ROI with Ω voxels within or surrounding the kidney can be defined as
…..6
where ij(t) represents the ‘true’ unmixed underlying intensity for tissue class j, at time t, and αωj is the
weighting or influence of a particular tissue class, j, at location ω. In matrix form, many individual voxel
observations can be combined into a set of equations of the form:
…..7
where o(t) = [o1(t), o2(t), …, oΩ(t)]T, i(t) = [i1(t), i2(t), …, iN(t)]T, and A is an Ω × N matrix with elementsαω
j.
Provided there are more observations per ROI than tissue types, that is Ω ≥ N, then solving for i(t) is
an over determined problem, where in solutions can be iteratively found, in a least-squares sense,
which then minimises the effects of measurement errors. Thus solving Eq. (7), produces an estimate
of the magnitude of the true signal tissue signal components, ij(t) at time t, that contribute to the
observed signal intensity. Repeated over each scanning interval leads to estimates of the unmixed
(i.e. PV-corrected) time–intensity curves for each component tissue. Note that within this framework
and the aforementioned assumptions of instant mixing, etc., once templates and mixing maps have
been defined, then ROI definition becomes a more arbitrary process: ROI definition simply selects
those Ω voxels (with Ω ≥ N) that the user wishes to include in Eq. (7) to solve for the N (=3 in our
case) tissue classes to be recovered. This allows us to produce PV-corrected estimates of the time–
intensity behaviour of each of the N tissue components being considered.
In order to quantify the effect of PV correction on the dynamic data, we have used the Rutland–
Patlak [15]approach that will estimate filtration of a renal curve. This is a well-known model that has
been successfully used in brain and kidney functional analysis. It is simple to apply, produces a
closed-form solution to estimate (in this case) relative GFR without need for a multi-parameter
estimation stage, apart from an analytical straight-line fit. The model only assumes unilateral flow from
the arterial compartment to the renal cortex and that no filtered tracer leaves the ROI. Provided that
analysis is undertaken within the appropriate timeframe, then the above assumption will remain
approximately valid [17]. Thus, glomerular filtration is estimated from plotting the following straight-line
equation:
…..8
where AROI(t) and RROI(t) represent the relative mean enhancement obtained from aortic arterial and
renal ROIs, respectively, defined as {S(t) − S(0)}/S(0), following the method of de Priester [18]. Using
Rutland–Patlak analysis between 30 and 90 s after the first rise of the signal from the baseline, S(0),
then leakage of contrast agent from the cortex is considered insignificantly small, and
thus k1 represents an estimate of GFR, and k2 an estimate of the blood pool contribution. We use a
semi-quantitative analysis based on the renal mean enhancement for the ROI which is sufficient for
the purpose of demonstrating PVEs in the analysis of DCE-MRI renal imaging. PVEs within the aorta
have also been ignored in this study as these represent a simple scaling factor common to both raw
and renal PV-corrected dynamic data.
It is perhaps also worth explicitly stating that this work is confined to relative estimates of GFR
quantification, as absolute quantification would otherwise require conversion from voxel intensity to
absolute [Gd] and accurate knowledge of the total 3D volume of the cortex. These are non-trivial
issues for absolute GFR estimation.
The processing times for PV correction were approximately 20 s per kidney using Matlab (The
MathWorks, Natick, MA) implementation on 32 bit dual core 1.86 GHz 3 Gb Windows Vista PC.
2. Results
The colour coding in Fig. 2 illustrates the number of tissue components that influence the observed
individual voxel intensities with the two ROIs used for analysis. This demonstrates there is significant
presence of adjacent tissue signals in the boundary region between the liver/spleen. Fig. 4 quantifies
this influence, which represents a typical distribution seen within the volunteer datasets, showing a
breakdown of the mixing components summed across each ROI. In both ROIs there is significant
presence from non-renal tissue.Table 1 further illustrates the variation observed in tissue composition
for the single-slice cortical ROIs across the cohort of volunteers for the single kidney slice. As can be
seen, the peri-renal components typically contribute approximately 20–30% to the overall tissue
composition within the ROIs, demonstrating significant contamination from adjacent tissues in what
was thought to be a ‘pure’ cortical ROI.
Fig. 4.
Corresponding bar charts demonstrating tissue signal composition from the ROIs in Fig. 2 (i.e. the sum of all
mixing values for each tissue inside an ROI) used in the analysis. Top row—Cortical ROI: demonstrates the
contributing tissue class signals from the right and left kidney, liver, spleen and background. Bottom row—
Large ROI (encompassing the entire kidney and surrounding anatomy). Note the significant non-renal
components in each of these ROIs which need to be accounted for in any subsequent analysis.
Table 1.
Overall tissue contributions (as a percentage) to the cortical ROIs (shown in Fig. 2) from kidney, liver and
background.
Volunteer
Right kidney cortical ROI
Left kidney cortical ROI
Kidney
Liver
Background
Kidney
Spleen
Background
1
80.1
0.8
19.1
75.3
0.3
24.5
2
69.7
3.8
26.5
73.6
0.0
26.4
3
65.7
1.3
33.0
64.7
0.4
34.9
4
82.9
0.7
16.4
81.2
0.0
18.8
5
76.3
1.1
22.6
67.8
2.4
29.8
6
75.6
0.9
23.5
76.0
0.1
24.0
7
79.3
1.1
19.6
78.3
0.7
21.0
8
72.1
3.2
24.7
72.7
0.7
26.6
9
81.0
1.5
17.5
78.0
2.8
19.2
10
76.3
4.2
19.5
78.5
1.3
20.2
Mean
75.9
1.9
22.2
74.6
0.9
24.5
Std. Dev.
5.4
1.3
5.0
5.1
1.0
5.1
Approximately a quarter of the contribution to the MR signal represented within those ROIs originates from
non-renal tissues.
Observed time–intensity plots were extracted from the cortical and rectangular ROIs for each
volunteer dataset. Using Eq. (7), the observed time–intensity curves were then de-composed into their
constituent parts, illustrated in Fig. 5 (top row), using the aforementioned technique. The middle row
of Fig. 5 illustrates the true assumed (unmixed) temporal signals from spleen/liver ROIs. These were
extracted from ROIs taken from the central regions of these large organ templates, where we assume
the influence of PV mixing is negligible. These were compared to the extracted component
liver/spleen signals (following PV analysis) from the left/right rectangular ROIs. These demonstrate
excellent agreement between the pure or unmixed signals and extracted PV-corrected estimates from
the large rectangular ROI know to be heavily corrupted (see Fig. 4), supporting the assumptions used
in the analysis, in particular the empirical PSF model and its assumed shift-invariance.
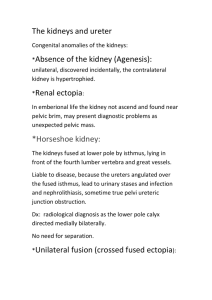
Fig. 5.
Top row: The observed time–intensity plot (labelled ROI, plotted as continuous line) extracted directly from the
large rectangular ROIs in Fig. 2. Using the PV analysis described in the text, PV-corrected responses were
extracted from this curve for left and right kidney (labelled LK, RK, respectively) liver (L), spleen (S), and
background (BK). The left column corresponds to the right kidney and the right column to the left kidney
throughout the figure. Note the dramatic change in shape of the PV-corrected LK/RK plots compared to the
flatter attenuated raw ROI plots. Middle row: Using the PV correction method, the recovered (PV-corrected)
liver and spleen components (○) re-plotted from the top row, compared to liver and spleen curves obtained
from ROIs containing only ‘pure’ voxels (i.e. only one signal component taken from the corresponding mixing
map) within the liver and spleen (continuous line). This illustrates successful recovery of the true tissue
component curves by PV analysis. Bottom row: The observed (i.e. uncorrected) time–intensity plot from the
cortical ROIs (lower plots), and the PV-corrected time–intensity plots from cortical (+) and rectangular ROIs
(upper continuous line). The similarity between both PV-corrected time–intensity plots illustrates the
robustness of the approach to the subjective task of renal cortical ROI definition during the period used for
Patlak analysis.
Removing the effect of these components using the aforementioned PV correction causes a change
in the shape of the recovered parenchymal renal curves with a steeper slope in the critical period of
filtration as can be seen from the time–intensity plots in the bottom row of Fig. 5. This also illustrates
the similarity between PV-corrected time–intensity plots for the cortical ROIs and the large rectangular
ROIs, demonstrating the robustness of the approach to the subjective task of renal cortical ROI
definition: this is despite the rectangular ROI suffering from >50% non-renal contamination.
Rutland–Patlak
analysis
was
applied
to
the
PV-corrected
and
uncorrected
data,
with
estimated k1 (GFR) produced. Table 2 illustrates the robustness of this approach to ROI selection,
taking the data from Fig. 5(bottom row), showing excellent consistency in estimated GFR, despite
widely different initial (uncorrected) estimates of k1. In both cases the estimated GFR has increased
and the r2 fit has improved. Table 3examines the effect of the PV correction on Rutland–Patlak
analysis across the entire volunteer cohort. In all cases, PV correction has produced an enhanced
estimate of k1 and a better conformation to the Rutland–Patlak model, as shown by an
improved r2 ( Fig. 6). This is perhaps surprising, given the relatively simple imaging model presented
here. However, the excellent consistency of the results across different tissues, ROIs and different
volunteers suggest that, at this region or tissue-based level of analysis, the PVE may be the dominant
obfuscating factor in GFR estimation using DCE-MRI methods.
Table 2.
Effect of ROI selection on k1 estimation, before and after PV correction.
ROI
Left kidney
k1
Right kidney
r2
k1
r2
Before
After
Before
After
Before
After
Before
After
Cortical ROI
0.015
0.023
0.90
0.96
0.014
0.022
0.93
0.97
Large ROI
0.005
0.023
0.84
0.97
0.005
0.021
0.80
0.98
Table 3.
Summary table showing the effects on k1 (relative GFR) before and after PV correction of cortical ROIs with
reported percentage change. The r2 fitting consistently demonstrates better model fitting after the PV
correction. This suggests that after the removal of the corrupting enhancement from other tissues, the
resulting data is more consistent with the Rutland–Patlak model.
Volunteer No.
Left kidney
Right kidney
k1 (×10−3/s)
k1 (×10−3/s)
r2
r2
Before
After
% inc
Before
After
Before
After
% inc
Before
After
1
4.8
7.2
35
0.92
0.95
4.4
7.2
37
0.90
0.95
2
6.0
9.2
36
0.91
0.96
6.0
1.1
44
0.92
0.96
3
5.2
8.4
39
0.91
0.96
5.2
9.2
43
0.95
0.97
4
7.6
1.2
33
0.83
0.89
6.0
7.6
24
0.79
0.86
5
3.6
7.2
48
0.82
0.95
2.8
6.0
52
0.72
0.90
6
7.6
1.4
44
0.75
0.88
7.2
11.2
35
0.80
0.88
7
8.4
1.2
32
0.95
0.98
8.0
11.2
29
0.97
0.98
8
4.8
7.6
40
0.77
0.88
4.4
7.6
41
0.81
0.90
9
6.0
7.6
21
0.88
0.91
6.8
8.8
22
0.93
0.94
10
6.0
9.2
34
0.90
0.96
5.6
8.8
39
0.93
0.97
Mean
6.00
6.02
36.2
0.86
0.93
5.64
7.87
36.6
0.87
0.93
Std. Dev.
1.50
3.36
7.36
0.07
0.04
1.53
2.90
9.37
0.08
0.04
Fig. 6.
Exemplar Rutland–Patlak analysis showing before (top) and after (bottom) PV correction of the intensity data
for the right (left column) and left (right column) kidneys from one of the volunteers. Note the change in slope
following PV correction. The Pearson coefficients top left R2 = 0.928 top right R2 = 0.904. Following PV
correction bottom left R2 = 0.974 bottom rightR2 = 0.955.
3. Discussion
The quantification of the renal curve derived from dynamic Gd contrast enhanced MR renography is
the subject of many publications. As the majority of the glomeruli are located in the renal cortex, most
authors use a cortical ROI when absolute quantification of GFR has been reported. However, the
above study has shown that the dynamic signal from the kidney contains significant contributions from
non-renal tissue, which may account for some of the variation observed in estimated GFR seen in the
prior literature, dependent on ROI location and size, when PVEs are ignored. Although there has
been recognition of the importance of the PVE within the brain, there is no quantification of its effect in
the kidney on DCE-MRI in the literature to date.
The above decomposition of the time–intensity curves from a user-defined renal ROI into its
constituent components reveals the importance of considering partial volume effects on a ROI placed
on the cortex. This study shows that within a central kidney slice containing a region of interest
naively thought to be ‘pure’ cortex of the left and right kidney, there was substantial contribution from
the adjacent tissues (∼25%). This effect can be expected to increase dramatically for those volumetric
slices at the extreme ends of the extent of the kidney. However, accurate definition of these regions is
non-trivial, and is the subject of on-going developments.
Our analysis also shows that removing the additional signal contribution due to partial volume effects
from surrounding tissues (liver/spleen and peri-renal) has a considerable effect (20–50% change) on
the slope of the recovered cortical Rutland–Patlak curve in this phase of the examination, the critical
time for the quantification of the GFR. We have also shown that using PV correction produced a
better fit to the data in Rutland–Patlak model space, suggesting the successful elimination of nonrenal time dependent signal components.
Conventionally, the signal from a cortical ROI, when applied to a model, uses an assumption that all
voxels comprise the same tissue type, and so have the same signal; or at least the average signal is
somehow characteristic of the region. Yet the outer cortical glomeruli are much denser than those in
the juxta-medullary region and thus a lower signal peak will be produced in this latter region
compared to the outer cortex. This is a limitation of all current kidney models. With further
development the PV model presented here one could address this issue, although in this initial
demonstration, the kidney is simplified as a single tissue type, and we have only addressed extrarenal factors. Further analysis considering PVEs from renal medulla and pelvic regions might be
expected to produce a better representation of the true, or unmixed, cortical curve. However, during
the crucial time necessary for analysis of GFR from DCE-MRI it can be assumed no gadolinium has
yet reached the collecting system. Thus overspill from these regions might be considered negligible in
this analysis.
If the method described here were to be extended to a voxel-by-voxel estimate of functional behaviour
(i.e. to produce parametric images), then other well known DCE-MRI effects ignored here (e.g.
magnetic field susceptibility variations and potential PSF shift variance due to Gd concentration
change), may need to be re-examined.
Our paper is the first publication discussing partial volume effects in MR urography and thus, it was
intended as a pilot study. In this paper we studied mainly the PV effects arising from the liver and the
spleen, as these organs are most likely to contribute the most to the partial volume in the kidneys.
However, further studies will be needed to fully understand the PV contributions from the renal
medulla, renal collecting system, muscle and bowel in all anatomical directions (antero-posterior,
lateral and cranio-caudal).
4. Conclusion
In conclusion, this study has demonstrated the importance of the PVE on the observed time–intensity
curve and subsequent Rutland–Patlak analysis for DCE-MRI. Its importance when quantifying GFR by
means of DCE-MRI was evident and has been widely ignored in the renal MRI literature. Renal
cortical ROIs have a contribution from non-renal tissues that may be as high as 20–30% due to the
PVE for the typical scanning sequences suggested for DCE-MRI. A method has been presented to
successfully remove these unwanted components that is robust to the subjective task of ROI
definition. Removal of such non-renal PVEs from renal ROIs can significantly change the slope of
renal time–intensity curves and so affect the estimation of GFR by DCE-MRI.
Acknowledgements
The authors would like to thank Baudouin Dennis de Senneville and Nicolas Grenier from the
University of Bordeaux for access and assistance with the motion correction software used in this
work. Kidney Research UK have funded the scanning of volunteers.
References
References
[1] C. Chantler, T.M. Barratt; Estimation of glomerular filtration rate from plasma clearance of 51-chromium
edetic acid; Archives of Disease in Childhood, 47 (254) (1972), pp. 613–617
[2] Y. Sun, J.M.F. Moura, C. Ho; Subpixel registration in renal perfusion MR image sequence; Proceedings of
the IEEE International Symposium on Biomedical Imaging: Macro to Nano, vol. 1 (2004), pp. 700–703
[3] J.A. de Priester, A.G.H. Kessels, E.L.W. Giele, J.A. den Boer, M.H.L. Christiaans, A. Hasman, J.M.A. van
Engelshoven; MR renography by semiautomated image analysis: performance in renal transplant recipients
Journal of Magnetic Resonance Imaging, 14 (2) (2001), pp. 134–140
[4] H. Rusinek, V.S. Lee, G. Johnson; Optimal dose of Gd-DTPA in dynamic MR studies; Magnetic Resonance in
Medicine, 46 (2) (2001), pp. 312–316
[5] L. Annet, L. Hermoye, F. Peeters, F. Jamar, J.P. Dehoux, B.E. van Beers; Glomerular filtration rate:
assessment with dynamic contrast-enhanced MRI and a cortical-compartmen model in the rabbit kidney
Journal of Magnetic Resonance Imaging, 20 (5) (2004), pp. 843–849
[6] N. Michoux, J.-P. Vallee, A. Pechere-Bertschi, X. Montet, L. Buehler, B.E.V. Beers; Analysis of contrastenhanced MR images to assess renal function. Magnetic Resonance Materials in Physics, Biology and Medicine,
19 (4) (2006), pp. 167–179
[7] M. Pedersen, Y. Shi, P. Anderson, H. Stodkilde-Jorgensen, J.C. Djurhuus, I. Gordon, J. Frokiaer; Quantitation
of differential renal blood flow and renal function using dynamic contrast-enhanced MRI in rats; Magnetic
Resonance Medicine, 51 (3) (2004), pp. 5F–517
[8] V.S. Lee, H. Rusinek, M.E. Noz, P. Lee, M. Raghavan, E.L. Kramer; Dynamic three-dimensional MR
renography for the measurement of single kidney function: initial experience; Radiology, 227 (1) (2003), pp.
289–294
[9] R.K.-S. Kwan, A.C. Evans, G.B. Pike; MRI simulation-based evaluation of image-processing and classification
methods; IEEE Transactions on Medical Imaging, 18 (11) (1999), pp. 1085–1097
[10] K. Van Leemput, F. Maes, D. Vandermeulen, P. Suetens; A unifying framework for partial volume
segmentation of brain MR images; IEEE Transactions on Medical Imaging, 22 (1) (2003), pp. 105–119
[11] M. Quarantelli, K. Berkouk, A. Prinster, B. Landeau, C. Svarer, L. Balkay; Integrated software for the
analysis of brain PET/SPECT studies with partial-volume-effect correction; Journal of Nuclear Medicine, 45 (2)
(2004), pp. 192–201
[12] B.D. de Senneville, I.A. Mendichovszky, S. Roujol, I. Gordon, C. Moonen, N. Grenier; Improvement of MRIfunctional measurement with automatic movement correction in native and transplanted kidneys; Journal of
Magnetic Resonance Imaging, 28 (October (4)) (2008), pp. 970–978
[13] D. Rodriguez Gutierrez, O. Diaz Montesdeoca, A. Moran Santana, K. Wells, I. Mendichovszky, I. Gordon;
MR-based renography as a replacement for radionuclide diagnostic renography studies; Proceedings of the
IEEE Nuclear Science Symposium & Medical Imaging Conference Record, IEEE Volume 6, 3 (2007), pp. 4556–
4563
[14] E.L. Giele, J.A. de Priester, J.A. Blom, J.A. den Boer, J.M. van Engelshoven, A. Hasman; Evaluation of two
cortical fraction estimation algorithms for the calculation of dynamic magnetic resonance renograms;
Computer Methods and Programs in Biomedicine, 67 (3) (2002), pp. 169–176
[15] C.S. Patlak, R.G. Blasberg, J.D. Fenstermacher; Graphical evaluation of blood-to-brain transfer constants
from multiple-time uptake data; Journal of Cerebral Blood Flow Metabolism, 3 (1) (1983), pp. 1–7
[16] M.C. Steckner, D.J. Drost, F.S. Prato; Computing the modulation transfer function of a magnetic
resonance imager; Medical Physics, 21 (3) (1994), pp. 483–489
[17] N. Hackstein, H. Kooijman, S. Tomaselli, W.S. Rau; Glomerular filtration rate measured using the Patlak
plot technique and contrast-enhanced dynamic MRI with different amounts of gadolinium-DTPA; Journal of
Magnetic Resonance Imaging, 22 (3) (2005), pp. 406–414
[18] J.A. de Priester, J.A. den Boer, M.H. Christiaans, A.G. Kessels, E.L. Giele, A. Hasman, H.P. van Hooff, J.M.
van Engelshoven; Automated quantitative evaluation of diseased and nondiseased renal transplants with MR
renography; Journal of Magnetic Resonance Imaging, 17 (1) (2003), pp. 95–103