Assessment of the acoustic telemetry positioning
advertisement

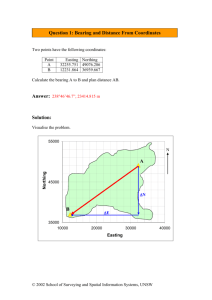
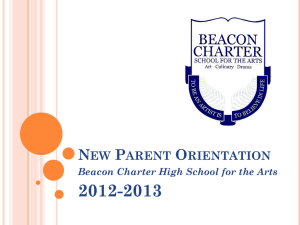
Assessment of the acoustic telemetry positioning system The performance of the acoustic telemetry system was assessed by determining positions of three beacon tags. The beacon tags were associated with two acoustic receivers located above intakes 1 and 5, and another one about 275 m from the powerhouse (Figure 1b in the main article). The position estimates for the beacon tags were computed with the software ALPS (Lotek Wireless Inc., Newmarket, Canada), using detections recorded in 15 randomly selected days when the receivers also detected tagged bull trout. The number of positions obtained for each beacon tag per hour was divided by the number of positions expected (i.e., 120) based on their burst rate of 30 seconds. The resulting proportions were multiplied by 100 and the values were used as a measure of positioning efficiency. Overall, median positioning efficiency was highest in the spring and lowest in the fall (Figures 1a, 1c, 1e). There was substantial variation in positioning efficiency among beacon tags, with those located on the powerhouse wall having the lowest values in each season (Figures 1a, 1c, 1e). Positioning efficiency for the beacon tags located on the powerhouse wall decreased with increases in operational discharge (Figures 1b and 1d). For the beacon tag located about 275 m from the powerhouse, positioning efficiency decreased with operational discharge changing from low to intermediate values and then increased with higher discharge (Figure 1f). The reasons for this unlikely relationship with discharge are unclear and indicate that other factors (e.g. wind, precipitation) not evaluated here might also have been responsible for variation in positioning efficiency of that beacon tag. 1 The easting and northing components of the position estimates were subtracted from the corresponding components of the fixed known locations of the beacon tags to compute positioning errors. Positioning errors were classified according to the quality class of each position as determined by their reliability number. Reliability number is a variable computed by ALPS that represents the effective number of receivers participating in the computation of a position estimate, with smaller errors occurring with increasing reliability number [1]. In our study, reliability number ranged from 0 to 7 and accordingly we categorized each positioning error into one of seven possible classes. Approximately 90% of the positions had absolute errors under 50 m on both the easting and northing components. Positions with absolute errors under 10 m on the easting and northing components comprised, respectively, 63% and 43% of the data (Figures 2a–b). As expected, error in the position estimates decreased in magnitude and variability with increasing reliability number (Figures 2c–d). We estimated the parameters of a t-distribution (using the “fitdistr” function in the R package “MASS”; [2]) fitted to the errors in the easting and northing components of positions in each reliability number class (Table 1). We used the estimates to fix the parameters of the t-distribution describing the positioning error in the observation equation (Eq. 2 in Additional file 2) of the DCRWS state-space model. References 1. Niezgoda G, Benfield M, Sisak M, Anson P: Tracking acoustic transmitters by code division multiple access (CDMA)-based telemetry. Hydrobiologia 2002, 483:275– 286. 2 2. Venables WN, Ripley BD: Modern Applied Statistics with S. 4th edition. New York: Springer; 2002. 3 Table 1 Maximum likelihood estimates of t-distribution parameters fitted to positional error data on the easting and northing components Parameter m t n 1 177.52 748.94 99.68 2 15.69 24.10 0.80 3 3.71 13.67 1.38 4 2.05 6.01 1.74 5 −1.62 4.25 1.79 6 −3.94 4.62 4.50 7 −1.83 0.90 2.22 1 — — — 2 23.78 24.64 0.69 3 −10.59 19.21 1.64 4 −11.57 15.63 4.39 5 −6.78 9.92 7.31 6 −3.20 0.92 0.88 7 −3.77 0.38 1.41 RN class Easting Northing The location and scale parameters are denoted, respectively, by m and t , and n denotes degrees of freedom. RN stands for reliability number and is a measure of position quality. It was not possible to estimate the parameters for RN class 1 in the northing component. 4 Therefore, in the DCRWS state-space model, parameter values for RN class 1 in the northing component were fixed to the values estimated for RN class 1 in the easting component. The units for the location and scale parameters are meters. 5 Figure 1 Efficiency of the acoustic telemetry system in positioning beacon tags by season (a, c, e) and hourly mean total operational discharge (b, d, f). (a, b) Beacon 6 tag on receiver above intake 1. (c, d) Beacon tag on receiver above intake 5; (e, f) Beacon tag on a receiver located about 275 m from the powerhouse. See Figure 1b in the main article for the location of the receivers and beacon tags. The lines in (b, d, f) denote a LOESS smoother identifying the trend in the data. 7 Figure 2 Error in the position estimates of three beacon tags (data were pooled). Cumulative empirical distribution function of the absolute error in the (a) easting and (b) northing components of the beacon tags position estimates. Relationship between reliability number (RN) and positioning error in the (c) easting and (d) northing components. 8