In order to detect potential mosquito breeding grounds, we are
advertisement

1
Mosquito Chasers
Mid-Project Report
Fall Semester 2015
-Full ReportBy
Chad Wachsmann
Austin Worden
Josh Olson
Ryan Robinson
Department of Electrical and Computer Engineering
Colorado State University
Fort Collins, Colorado 80521
Project Advisor: Dr. Ali Pezeshki
Approved by: Dr. Ali Pezeshki
2
Abstract:
Every year there are upwards of 350 million cases of Dengue Fever worldwide. This mosquitoborne illness spreads rapidly in tropical and subtropical climates and is currently without a cure.
Experts in the field of disease control have expressed interest in knowing the exact location of
breeding grounds for mosquitos. There is a need for a system of effectively and efficiently
identifying mosquito breeding grounds in larger, urban population centers, with Mexico City at
the frontline.
This report presents a newer approach at creating this system. We have used the Scale Invariant
Feature Transform (SIFT) algorithm to process large sets of images. These pictures are taken 20
feet above the ground from a quadcopter. We then use Support Vector Machines (SVM) and
vector quantization to determine the probability that an image contains a potential mosquito
breeding ground. Our program contains two main sections: training and testing. First, we use a
large set of known images to “train” the program so that it can recognize which new images have
potential breeding grounds and which do not. The new images are sent into the testing program
that uses data from the training to determine probability.
The images fed into the program are also geotagged. In the future, we plan to develop a type of
heat map using the geotagging information and probability outputs, allowing us to see the
relative probabilities of mosquito breeding grounds in a certain city or other locations on a map.
3
Table of Contents
Title
1
Abstract
2
Table of Contents
3
1. Introduction
4
2. Design Constraints and Objectives
5
3. SIFT Theory
6
4. Code
6
5. Picking a Correct Camera
9
6. Geotagging Images and Time Stamping Images
10
7. Risk Mitigation
11
8. Conclusion and Future Work
15
References
17
Appendix A - Abbreviations
18
Appendix B - Budget
19
Appendix C - Project Plan Evolution
20
Appendix D - Training Code
24
Appendix E - Testing Code
28
Appendix F - Remove Noise Function
30
Appendix G - Confusion Matrix Generator
31
Appendix H – Field of View Calculations
32
4
1. Introduction
Every year there are upwards of 350 million cases of Dengue Fever worldwide. This mosquitoborne illness spreads rapidly in tropical and subtropical climates and is currently without a cure.
Experts in the field of disease control have expressed interest in knowing the exact location of
breeding grounds for mosquitos. There is a need for a system of effectively and efficiently
identifying mosquito breeding grounds in larger, urban population centers, with Mexico City at
the frontline.
Our proposed solution to this problem is to attach a camera to quadcopter and use the quadcopter
to take aerial pictures of the area. We will then use create a computer program to analyze the
images and determine which images have potential mosquito breeding grounds. This approach is
very viable because the quadcopter will be able to cover a large amount of land in a short period
of time and will have a unique viewing angle that will allow us to spot potential breeding
grounds that are on roofs or hard to reach areas.
In this application, we will need to quickly analyze and classify hundreds of images in a very
short amount of time – a task that doesn’t make sense to do by hand. We will use MATLAB to
write a program that performs these tasks on as many images as is needed. There exists a handful
of robust image processing algorithms that can be used in the first step of our solution, using a
computer to “look” at a large set of images instead of viewing and classifying every single
ourselves. In 1999, David Lowe, a professor of computer science at the University of British
Columbia, published a paper detailing image processing algorithm called SIFT (Scale Invariant
Feature Transform). This algorithm is ideal for our application because it is resistant to changes
in scale, rotation, and relative position. this means the the algorithm is able to recognize objects
no matter where they are in the image, which way they face, or what size they are. This
algorithm is used as our primary tool in identifying breeding grounds. The other primary step of
the process is classifying these images, in terms of whether or not they contain a potential
mosquito breeding ground. This is done using technology called Support Vector Machines, or
SVM. Mathworks has written their own SVM library and it is included in Matlab. This SVM is
what will be used to classify each image as either containing a potential breeding ground, or not
containing one.
Once the quadcopter has images of an area, we will use our code to search for specific items in
the images that indicate the possibility of a mosquito breeding ground. Mosquito breeding
grounds occur wherever there is stagnant water. Some common sources of stagnant water are
puddles, buckets, and old tires. The first step of our project will be to create a program that can
recognize if any of these three items are in a specific image.
5
Alongside this, our more specific task was to use this program with a method of gathering these
images quickly and efficiently. We will be using a quad copter that was created by a previous
year’s senior design team. We will then attach a GoPro to the quadcopter and generate an
automated flight plan to fly it around and take pictures. We then take these images from the
camera and feed them through the program. The program will then generate a map that describes
what areas have potential mosquito breeding grounds.
In Chapter 2, we will talk about what constraints we need to be cautious about while still
achieving our objectives. Chapter 3 presents the necessary theory behind the SIFT algorithm,
where it comes from, how it functions, and the key features that make it useful for our purpose.
Chapter 4 will go into detail about our code. It will detail the process we followed and the
algorithms used to complete the task. In chapter 5, we explain the process we went through to
choose the appropriate camera for this project. We will also talk about the calculations that we
performed to determine the optimal height to fly the quadcopter. Chapter 6 describes our current
progress in geotagging the images, how we were able to get this capability in spite of the
GoPro’s capabilities, and what we plan to do with the geotagging in the future. Chapter 7 will
detail the risks that we might encounter and how to avoid them. Chapter 8 will conclude our
report and talk about our plans for next semester.
2. Objectives and Design Constraints
Objectives:
As the semester has progressed and we have set reasonable goals for ourselves to accomplish,we
decided that our best course of action would be to pursue a proof of concept approach. It was
our goal by the end of the first semester to be able to identify a puddle, a bucket, and a tire with
over 80% accuracy from the air.
1st Semester Objective:
1. Identify a test set from the air with 80% accuracy.
2. Have a concrete plan and idea for geotagging images
Design Constraints:
We are limited to one pound of payload on the quadcopter and are limited to 30 minutes of flight
time. We also are limited to only testing in Coby’s facility until FAA approval is given to
operate the quadcopter in other areas. Also, because there is no real rush on how fast it is
6
necessary to run through our algorithms, our only constraint we put on the algorithm to run
through iterations was out of convenience. Our entire program needs to be able to run through
our data set over night (a ten hour period).
Flight Time: 30 minutes
Weight of Camera: 1 lb
Budget: $600
Time for code to run: 10 hours
3. SIFT Theory
SIFT stands for Scale-Invariant Feature Transform developed by David Lowe[1]. It is an image
processing technique to determine whether or not an image contains a specific feature. This
technique works on any feature regardless of its scale, rotation, translation, or illumination to a
certain extent. Sift works by calculating the difference between two images convolved with
different Gaussian curve. The difference image is represented by a large collection of vectors.
Several training sets are used to determine the dominant orientation, these dominant orientations
are assigned to localized keypoints. After the localized key points are determined, the gradient is
performed to determine the direction and magnitude of the greatest change at that location. The
result is 1-by-128 feature vector that represents the localized key feature. Matching image
features on new images accesses these key points and compares them to the new image to find
the key points closest to the descriptor vector.
4. Code
In order to detect potential mosquito breeding grounds, we are following a method detailed in the
paper “Detection of Potential Mosquito Breeding Sites based on Community Sourced Geotagged
Images”[2]. In their paper, Ankit Agrawal, Ushasi Chaudhuri, Subhasis Chaudhuri, and Guna
Seetharaman used several key steps to determine mosquito breeding grounds, all centered around
the SIFT algorithm. By using two sets of training data, one set where a potential mosquito
breeding ground is present and one where a potential mosquito breeding ground is not present,
this method can predict whether a new image has a mosquito breeding ground in it. The first step
in this process was to run the training images through the SIFT algorithm. The output of this
algorithm would be an array of all the feature vectors for each image. A feature vector is a 1-by128 array that contains information about the orientation and magnitude of the key feature. Each
image produces several thousand feature vectors, which results in an X-by-128 array. The next
step is to take the feature vectors from each image in the training set, and union them together.
This step combines all the feature vectors while removing any possible duplicates. After we have
a master list of all the unique feature vectors, we use a method, called k-means clustering, to
7
essential group together all the vectors that are very similar. This method will take in an array of
data and reduce it into ‘K’ clusters. Each of the clusters will represent several of the unique
feature vectors. Following Agrawal, Chaudhuri, Chaudhuri, and Seetharaman’s method, we are
using, where N is the number of total unique feature vectors. After we have K clusters, we go
back and compare each of the original image’s full set of feature vectors to the generated
clusters. This process is called Vector Quantization. The result of this comparison is an X-by-1
array, where each cell is an integer. This integer represents which one of the clusters was closest
to the feature vector, we will then perform a histogram on the array produced from each image.
This new array will be a K-by-1 array where each cell is a decimal number between 0 and 1.
Each cell is representative of a cluster. So cell 1 represents cluster 1, and so on. The value in this
cell is now the probability that a specific cluster will appear in a specific image. After this step,
we have a K-by-1 array for each image in the training data set. These array are then used to train
a Support Vector Machine (SVM). SVM is a tool used to classify data by graphing all the
training data points fed into it, and trying to find a hyperplane that separates the two sets of data.
Once the SVM is trained, we can use it to predict whether or not a new image has a mosquito
breeding ground in it.
Once we have the SVM trained, a new image has to go through a similar process in order for the
SVM to accurately predict the presence of a mosquito breeding ground within the image. The
first step is for the image to be analyzed using the SIFT algorithm. After this, the image will go
through a vector quantizer using the same clusters from the training data. This will transform the
image’s feature vectors into an array describe which of the training clusters each of the image’s
feature vectors is closest to. The next step is to perform a histogram of the newly produced array.
Now we have an array describing the probability of the clusters appearing in the image being
tested. This is the same data format that the SVM was trained with so we can now use the SVM
to predict if the new image has a mosquito breeding ground in it or not.
All of our coding was done in Matlab. The first step in our coding process was to either create or
find a working SIFT algorithm. After researching David Lowe, we found a demo version of his
SIFT algorithm being offered from the University of British Columbia [1]. Since this algorithm
was created by David Lowe and was compatible with Matlab, it was the more reliable option.
Since we are using the demo version of his software, there are some limitations of the algorithm.
The biggest limitation being that the algorithm will throw an error if the image fed into the
algorithm has more than 1800 pixels in any direction. This limits the image size to just over 3
Megapixels. Using Matlab, we can reduce our picture from its original size to a size that the
SIFT algorithm will accept. However, this will reduce the resolution of the image. As a result, it
may be more difficult to predict the presence of a mosquito breeding ground because the
breeding ground will take up less pixels in the image and be harder to detect.
8
All of the remaining steps (K-Means clustering, Vector Quantization, Histogram, and SVM)
were accomplished using methods that were created by Mathworks and included in Matlab. the
remainder of our code ensures that the data is handled correctly between methods and that it is in
the format required for each method.
After we created a rough draft of our code, we tested it first on a sample set of 30 black squares
and 30 black triangles on a white background. The goal was that our classifier would be able to
accurately predict if an image was a square or a triangle. In order to determine how well our
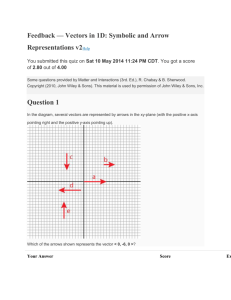
classifier was working, we developed a confusion matrix. A confusion matrix is an easy way to
visualize how well the classifier predicts the contents of an image. Figure 1 shows the confusion
matrix that we used to visualize our accuracy. Figure 2 shows the result of our first test. This first
test wasn’t accurate enough so we needed a way to improve the accuracy. After looking at an
image with the SIFT feature vectors overlaid on the image, we noticed that there were a lot of
small vectors that looked like noise. We then developed a Matlab function that would remove
these noise vectors after the SIFT step was performed. We set this function up so that you could
directly feed it the information that the SIFT algorithm generated. The function would then
regenerate this information. The only difference between the two sets of data is that the second
set of data would not contain any information associated with feature vectors which had a
magnitude below X, where x is a variable that could be adjusted to remove more noise or less
noise. For this sample set of data, removing some of the noise ended up improving the accuracy.
After testing different values of X, it was determined that the best value of X for the squares and
triangle data set was X=0.9 and gave us an accuracy of about 85%.
Number of Pictures Containing Potential
Mosquito Breeding Grounds that were
Correctly Classified
Number of Pictures Containing Potential
Mosquito Breeding Grounds that were
Incorrectly Classified
Number of Pictures Containing No Potential
Mosquito Breeding Grounds that were
Correctly Classified
Number of Pictures Containing No Potential
Mosquito Breeding Grounds that were
Incorrectly Classified
Figure 1
23
7
2
28
Figure 2
9
We decided to run another simple test to further verify that our code was working as planned.
We generated a set of 40 black squares on a white background and 40 circles on a white
background. We then used 30 of each set of images to train the classifier. After the classifier was
trained, we used tested all 40 images in each data set. After testing with different values of X, the
most accurate value ended up being 0.5 with an accuracy of about 81%. We consider this
accuracy to be high enough since Agrawal, Chaudhuri, Chaudhuri, and Seetharaman’s paper
reported a similar accuracy.
After proving that our code works with simple images, we started to gather and test images that
might represent mosquito breeding grounds. We started with pictures of a bucket filled with
water vs. pictures with no bucket. We first ran the code with no noise reduction. This resulted in
an accuracy of 56% which was not desirable. After testing this code with many different values
of X, we realized that the noise reduction function was having little effect on the accuracy of our
code. This caused us to go back to the basics and review our code. during this we realized a
significant mistake that we had made.
One of the key features of the SIFT algorithm is its ability to be scale-invariant and rotation
invariant. When we went to create the remove noise function, We saw that all the key feature
vectors were unit vectors. We were so focused on trying to remove the noise from the image, that
we started doing our calculations based on the unit vectors scaled to their appropriate length. The
essential result of this was that we lost ability to be scale invariant. As a result. our accuracy was
greatly diminished. After fixing this error and running the code with the bucket of water data set
vs. the no bucket data set, we ended up with the confusion matrix shown in figure 3. This
confusion matrix result in an overall accuracy of 86%.
25
0
8
17
Figure 3
5. Picking a Camera - GoPro Hero 3
Early into the project we knew that we had a few different design constraints that we needed to
consider. Something very important was that we picked a camera with the right specifications
for the project. We are limited to a $600 budget for our entire team, so naturally, an infrared
sensor was not something within our budget, as anything worth using would use our entire
10
budget. We also needed a camera with at least 30+ hours of battery life as that is the max
ammount of flying time that our battery limits us to. We also needed to make sure our camera
was under one pound for the quadcopter to operate correctly.
After a series of calculations and understanding (FOV) Field of View, we decided that a GOPro
Hero 3 would have enough resolution to accomplish what we needed to. We were mainly
concerned with how high we could fly the quadcopter in order to have a satisfactory Pixels per
Centimeter rating. Attached in Appendix E are the calculations that were done to know what the
correct number of Pixels per Centimeter on each specific height we could fly the quadcopter.
These were the final results at possible flying heights:
20 ft: 2.8 Pixels/centimeter
30 ft: 1.9 Pixels/centimeter
40 ft: 1.4 Pixels/centimeter
It was conclusive that the GoPro Hero 3 Silver Edition would give us the necessary image
quality that we need for our sift algorithm to work correctly for our goals this semester.
The camera also made all of the initial testing go very smoothly because of the user friendly
interface that the GoPro incorporates. We could take the images from our phones before we
would ever actually even need to create a triggering mechanism for the camera. If it turns out
we need to have higher quality images later on in the project when we incorporate a flight plan
with a quadcopter that is constantly moving, we will be able to re-evaluate later. However, for
now we have images that are behaving as we would expect.
Down side to GoPro: One of the major downsides to working with a GoPro is that a GoPro
unfortunately does not have an internal GPS chip. So, because the overall goal for the project
was to develop a heatmap by the end, it will be necessary to figure out a way to geotag each
image, as described in the following section.
6. Geotagging
As stated above, one of the downsides to using a GoPro is that there is no GPS chip located
internally. However, because we decided to move forward with that camera choice, the only
possible way we could create a heatmap would be to Geotag the images. After some research
and discussions, we were able to construct a way to do this. Every JPEG image, which is the
image file that a GoPro will captur, has a set of metadata. This metadata is known as EXIF
metadata; standing for Exchangeable Image File. This file includes copious amounts of
information.
11
The two pieces that we are most concerned with are the date stamp and the GPS tag. These two
lines of data are important to us because we have found that the PIXHAWK system that is flown
with our quadcopter can output a set of IMU data. This IMU data ends up being able to track the
GPS coordinates of quadcopter to the nearest meter along with the timestamp from the moment
the quadcopter was turned on. However, since this was not in the same format that the
timestamp on the GoPro was done in, it is necessary to create a way to interchange the two with
an algorithm.
In order to write to an image’s EXIF file we were able to find a open source MATLAB script by
Peter Burns [3]. This MATLAB code takes the existing metadata and writes over it to create an
image with the gps coordinates from the IMU data. We attached to an appendix what our IMU
dataset looks like when generated. By using one large MATLAB script with a few giant “for
loops” we will be able take the GPS coordinates and time stamped data from the IMU data file
the PIXHAWK generates and rewrite the metadata of a GoPro Captured image. By doing this,
we will most likely be able use google maps with an add-on to create a heat map of where we
spotted possible mosquito breeding grounds.
7. Risk Mitigation
The following table lists out possible risks that may prevent a successful working product being
delivered by May. So we have decided to create possible testing plans for each risk we have
listed.
Risk Mitigation
Risk #
Risk Description
Risk Result
Risk
Level
Mitigation Plan
1
Incompatible Image
Software would be
useless
8
Double check image
type and
be in constant
communication with
Josh and Austin
2
Unable to Trigger Camera
Would have no
9
Work a Plan with
12
pictures
Coby
3
Images are Blurry
Software may not
work
7
Work with Go Pro
and understand how
to receive a clear
image
4
Inadequate Sample Set
Code would be
useless
8
Understand the
research enough to
generate our own
sample set
5
Inadequate Open Source
Software
The project is a
bust
10
Invest some of our
budget into
commercial software
6
Code doesn’t work during
dry seasons
Only works for wet 3
times
Create a more robust
code and
do further research
7
SIFT and SVM are not
Compatible
Project is a bust
Constant
Communication
between Josh and
Austin
10
Risk #2: This is the first risk we are concerned with.Triggering the camera is something
important to test. Our testing plan for this could be something simple. Right now our camera is
triggered on a 5 second time interval. However, as we further develop the project with a flight
plan, we will need to make sure that our camera triggers when we need it to. A simple check of
triggering the camera 20 times and making sure there is no delay would be a sufficient in
determining if more time needs to be spent working with the process.
Risk #3: Blurry images would really prevent the system from working. So, what we have
decided to do is implement a MatLab script that can sort through image quality and eliminate
images that will not work. The theory is called Blind/Referenceless Image Spatial Quality
Evaluator (BRISQUE). We will run the BRISQUE code on our images and then do a visual
check on 50 or so images to make sure that the code was able to eliminate all of the blurry
images from our data set.
Risk #5: Implementing our Design
As our design is being built, there are several steps that will be taken to ensure that the code
being written, is being written correctly.Our code will have a couple major sections. These
sections are SIFT, K-means clustering, vector quantization, and SVM. Each of these sections of
code will be written separately and verified.
13
The SIFT section needs to be able to read in multiple images and run it through a SIFT
algorithm. In order to test this, we created the section that will read in the images. This section
needed to be able to read in the image names from a folder and feed that name into the SIFT
algorithm. To verify this, all that was needed was a simple print statement that would print that
name of the image before feeding it into the algorithm. The algorithm itself was tricky to verify.
SIFT is a process of determining the keypoints in an image. David Lowe created this method of
determining key points. At the end of the day we determined that the SIFT algorithm we were
using was correct and accurate because it was actually written by David Lowe. The last task for
this section of code is to correctly store the output from the algorithm. This task was validated by
running a couple test pictures through the algorithm, looking at the output, and comparing it to
what the code stored. I Matlab, it is very easy to compare variables in the workspace. While
testing this task, it was determined that the data type we were using to store the data, was not
flexible enough to store different sized data sets. Each picture run through SIFT will have a
different sized output. As a result, the global variable needs to be flexible enough to account for
this.
The next section of the code is the K-means clustering. This is a relatively small section of code.
The first portion of the code will combine all the unique vectors that were outputted from the
SIFT section into one variable. This union of data was relatively easy to verify. I created a
couple of small variables, combined them, and looked at the output in Matlab’s workspace. It
was determined that the union of these vectors was done correctly on a small scale, therefore it
will work when we try to union thousands of vectors. Once the union was complete, the vectors
had to go through a process called K-means clustering. This will group vectors together into ‘K’
unique clusters. Luckily, Matlab has created a method to do just this. The easiest way to verify
that this was working correctly was to feed in several vectors and then look at the output. The
output was a matrix containing information about the K clusters. Since this is an official Matlab
and the output was in the expected format, we can conclude that the K-means Clustering section
works correctly.
The third section of the code is Vector Quantization. This section of the code will compare the
clusters to the original SIFT data and classify each of the original SIFT vectors as one of the new
clusters. Matlab has also created a function for this. To verify that the output of this code was
what we expected, we generated a couple of sample clusters and sample vectors and fed it into
the Vector Quantizer. The output of this should be a matrix of size 1 by the number of vectors,
where each cell is an integer value between 1 and the number of clusters. When we looked at the
output of the Quantizer, we saw that the matrix was the correct size and only contained valid
values. This coupled with the fact that Matlab wrote this function, it is safe to assume that the
Vector Quantizer works correctly. Once the quantization is complete, a histogram needs to be
created for each image. This histogram will produce a matrix of size 1 by the number of clusters.
Each cell in the matrix will show how many times a certain cluster appears in an image. This
14
value will then be divided by the total number of vectors such that the value in each cell
represents the probability of a certain vector appearing in an image. This was verified in a very
similar manner to the Vector Quantizer. We fed in some sample data and looked at the output.
The output of the histogram section was a matrix of correct size where each cell had a value
between 0 and 1. This is exactly as it should be and verifies that the histogram section works
correctly.
The final section to verify is the SVM section. SVM stands for Support Vector Machine. The job
of this section of code is to classify new data into one of two groups based on the training data
received. Matlab has written a function that does just this. Similar to the other sections of code,
we fed some sample data into it and looked at the output. The output should have been a label
classifying the new data into one of the two predefined groups. We generated a sample set of
data to feed into the SVM and we looked at the output. The output was one of the two groups so
we were able to verify that this function at least did what Matlab said it should. However, it was
very tricky to create a sample set of data such that we could determine the accuracy of the SVM.
As a result, we did a proof of concept test to verify that the classifier worked along with the rest
of the code.
Proof of Concept
The first step in verifying that the implementation of our design works correctly will be to test
our code on a set of simple images. We chose to generate a set of images of black squares on a
white background and a set of images of black triangles on a white background. If our code and
classifier are working correctly, then we should be able to use these simple images to test
whether or not our code works. Once all the code sections were integrated, we fed the two simple
sample sets of images into our program.as a result, our code created a classifier that we could use
to predict whether a new image is a square or a triangle. To verify that our classifier works, we
will ask the classifier to predict whether an image is a square or a triangle. The images we will
use are the images that we used to train the classifier. If the classifier is working correctly, then
we should have 100% accuracy using the images we used to train the classifier.
The first time we did this, we found the classifier did not work. After looking at the code we
found a possible reason as to why it didn’t work. We believe that the vectors outputted from the
SIFT code were all unit vectors. We believe that these vectors need to be scaled to their
respective lengths. We will continue to test our classifier using this simple data set. Our plan is
that this data set, along with the sectional testing, will allow us to find all the errors in our code.
If we work out all the bugs in our code and we still don’t have 100% accuracy, we will have to
go back to the drawing board to determine a new method of classifying images. The sections that
have the highest probability of not working the way we need to are the SFIT section or the SVM
section. If it is determined that one of these sections isn’t accurate enough, then we will find a
new method to accomplish the same goal.
15
8. Conclusion and Future Work
We had a very productive semester. We were able to successfully create a classifier that could
predict the presence of a potential mosquito breeding ground. This classifier was created using
the SIFT algorithm created by David Lowe and by following the implementation described by
Agrawal, Chaudhuri, Chaudhuri, and Seetharaman. On top of this success, we were started to
generate a set of data that could be used to train our classifier. We were able to generate a robust
set of data because of the calculations that were done to determine the best altitude to take
pictures from. We have also made a good amount of progress towards being able to geotag the
images. This is the first major step to potentially being able to generate a heatmap of the
potential mosquito breeding grounds.
After looking back at all we’ve accomplished this semester, we realize that there is still plenty of
work to be done in several areas. The first area to be focused on would be the code. As of now,
we have been able to use our code to predict the possible presence of mosquito breeding grounds
with an accuracy up to 86%. There is room for improvement for this statistic. In order to increase
the accuracy of this classifier, there are several steps we can take. The first step we plan to take is
to gather more training data. In Agrawal, Chaudhuri, Chaudhuri, and Seetharaman’s paper, they
gathered close to 500 images, 250 had potential mosquito breeding grounds and 250 did not have
potential breeding grounds. We plan to increase our training data from 50 to at least 500. More
training data usually improves accuracy. However, as you increase the number of training
images used, you could encounter an issue where the classifier becomes over trained and the
overall accuracy of the system will decrease. Next semester, we would ideally try to find out an
optimal number of images to use to train our classifier. Another way we could improve the
accuracy of our code would be to use a different SVM. The SVM we used is a SVM that
Mathworks wrote and included in Matlab. However, there are many other open source SVMs
that we could use. For example, in Agrawal, Chaudhuri, Chaudhuri, and Seetharaman’s paper,
they mention which SVM machine they used for their implementation of this design. Currently
in our code, we have to reduce the resolution of our images in order to input it to the SIFT
algorithm. This is a possible area that could be hurting our accuracy. A possible way to fix this
would be to take a single picture and then crop it into several smaller pictures. We would then
use these smaller pictures to do the predictions. One of the problems with our code right now is
that the output of the data could be improved. Currently, the output of the code is in an array
format. This could be greatly improved so that it is easier to read and interpret. One of the
possible solutions we have discussed is to generate a heatmap displaying the probability of a
mosquito breeding ground being in a certain location. In order to do this, we would need to find
and use a different SVM. this new SVM would need to have the ability to report back the
probability of the prediction being correct.
16
Once we have our core code working, we have several possible additions that would improve our
overall project. Currently when we attach the GoPro to the quadcopter, the quadcopter has to be
manually flown around. There are many open source software packages that we could use to
automate the flight path of the quadcopter. This would allow us to optimize the coverage of the
quadcopter and the coverage of our prediction software.
Currently we are only able to predict if there is a potential mosquito breeding currently in an
image. The next step would be to train our SVM to predict if the location will contain a potential
breeding ground once it starts raining at that location. For example, we currently assume that a
bucket full of water is a potential breeding ground while an empty bucket is not a potential
breeding ground. However, once it starts raining near the bucket, the bucket will fill with water
and become a potential breeding ground for mosquitos. There are two possible ways to
implement this change. The most simple way would be to create two instances of our code. one
instance will be trained to predict whether an image currently contains a potential breeding
ground while the second instance will be trained to predict if the image will contain a breeding
ground in the future. The second way to implement this change would be to choose a different
SVM. This new SVM will need to be a 3-class classifier. The three classes would be current
breeding ground, future breeding ground, and no chance to be a breeding ground. The plan for
next semester will be to try both solutions and implement the solution that is more accurate.
17
References
[1]D. Lowe, ‘Keypoint detector’, Cs.ubc.ca, 2015. [online] Available:
http://www.cs.ubc.ca/~lowe/keypoints/ . [Accessed: 12-Dec-2015].
[2]A. Agarwal, U. Chaudhuri, S. Chaudhuri, G Seetharaman, ‘Detection of potential mosquito
breeding sites based on community sourced geotagged images’ Geospatial InfoFusion and Video
Analytics IV; and Motion Imagery for ISR and Situation Awareness II,2014.
[3]P. Burns, 'run_exiftool - File Exchange - MATLAB Central', Mathworks.com, 2015.
[Online]. Available: http://www.mathworks.com/matlabcentral/fileexchange/42000-run-exiftool.
[Accessed: 12- Dec- 2015].
18
Appendix A - Abbreviations
SIFT - Scale Invariant Feature Transform
SVM - Support Vector Machine
Metadata - a set of data that describes and gives information about each image
IMU - Inertial Measurement Unit
GPS - Global Positioning System
EXIF - Exchangeable Image File Format
19
Appendix B - Budget
The budget for this project was $200 for each member, totaling $800. This all came from
the ECE Student Project Fund. The only item we had to spend some of this budget on was the
GoPro camera, which we bought used. In order to obtain a complete set of sample data to train
our program, we went around to thrift stores to find a 5 gallon bucket and tire stores to get any
old tire. We finally got donations for the bucket and tire from CSU Surplus and Alpine Tire
Center, respectively. Fortunately, we were able to use a Quad Copter from that one place to take
aerial images, free of charge.
Items Purchased
Cost
GoPro Hero 3 Silver Edition
$200
5 Gallon Bucket
Donation: CSU Surplus
Old Tire
Donation: Alpine Tire Center
Total: $200
Figure 4
20
Appendix C - Project Plan Evolution
21
Initial Project Plan -
22
Mid-semester Plan Revision –
23
End of Fall Semester Project Plan
24
Final Project Plan:
Project Plan Explanation:
As the semester has progressed, naturally we have needed to make change to our project plan.
However, we still did manage to still to schedule and accomplish large portion of our early
semester goals. One of the major changes that took place was us losing one of our group
members. Because of this we needed to re assign tasks to other group members. It did not
however end up proving to be that much of a blow to the project as we originally thought it
would be. One of the main objectives that we are still working on is the geotagging process and
having a matlab script that automates it. As stated earlier, we do have a wa
25
Appendix D – Training Code
%read in images
%loop until all images are read in clear; addpath('Yes'); addpath('No');
YesPics = dir('Yes/*.jpg'); %directory containing water photos
NoPics = dir('No/*.jpg'); %directory containing no water photos
%read in the yes images and perform sift on them
SizeYes = length(YesPics); clear('A'); A = cell(1,SizeYes); for i = 1:SizeYes
%Convert selected image to .pgm file
X = imread(YesPics(i).name);
%resize image so that sift doesnt error out.
c = imresize(X, [1600,900]); imwrite(c,'test.pgm'); %call Sift function on the image
[image, descriptors, locs] = sift('test.pgm');
%show the image with the Sift vectors in the image
%showkeys(image, locs);
% [cleandes,cleanlocs] = removeNoise(descriptors,locs);
%
newdes = cleandes;
%
for j = 1:size(newdes,1) %
newdes(j,:)=newdes(j,:)*cleanlocs(j,3);
%
%
end
%put the vectors from each picture into a 3d array, 'A'
A{i} = descriptors; disp(i) end
%read in all the No pics and perform sift on them
SizeNo = length(NoPics); clear('B'); B = cell(1,SizeNo); for i = 1:SizeNo
%Convert selected image to .pgm file
X = imread(NoPics(i).name);
%resize image so that sift doesnt error out.
%
c = imresize(X, [1600,900]); imwrite(c,'test.pgm'); %call Sift function on the image
[image, descriptors, locs] = sift('test.pgm');
%show the image with the Sift vectors in the image %showkeys(image, locs);
[cleandes,cleanlocs] = removeNoise(descriptors,locs);
%put the vectors from each picture into an 3d array, 'B'
26
%
%
%
newdes = cleandes;
for j = 1:size(newdes,1) %
newdes(j,:)=newdes(j,:)*cleanlocs(j,3);
%
end
B{i} = descriptors;
disp(i) end
%union them together N=A{i}; for i =2:SizeYes
N=union(N,A{i},'rows'); end
for i =1:SizeNo
N=union(N,B{i},'rows'); end
disp('union')
%kmeans squared of unioned set %get the size of the matrix (#of vectors in the images)
[D,E] = size(N);
%kmeans clustering
%http://www.mathworks.com/help/stats/kmeans.html#buefthh-2
%convert the 3d array into a usable 2d array % Master = squeeze(N(1,:,:));
% %verify 3d->2d array conversion
% size(Master);
%Clusters contains the cluster information
K = ceil(sqrt(D));
[idx,Clusters] = kmeans(N, K); disp('clustered')
%vector quantization of inputed images
%create vector quantizer %codebook k-by-N matrix each column is a codeword
Codebook = transpose(Clusters);
%CodewordOutputPort
%if true, the index of the codeword closest to the input vector is outputed
%CodewordOutputPort = true;
VectorQuantizer =
dsp.VectorQuantizerEncoder('Codebook',Codebook);%,'CodewordOutputPort', true);
%step returns which cluster the input vector is closest to
%Input can be k-by-1 or k-by-M k=#ofVectorDescriptors %Input = transpose(descriptors);
%http://www.mathworks.com/help/dsp/ref/dsp.vectorquantizerencoder-class.html
%http://www.mathworks.com/help/dsp/ref/dsp.vectorquantizerencoder.step.html
%index = step(VectorQuantizer,Input);
%Vector Quantize A
%Create cell structure to hold all the clustered arrays YesClustered = cell(1,SizeYes);
27
%loop through all the images and vector quantize each of them for i = 1:SizeYes
%get the vectors for each image
Asimple = A{i};
%transpose the vectors for each image
Atranspose = transpose(Asimple); %vector quantize each image
release(VectorQuantizer);
YesClustered{i} = step(VectorQuantizer,Atranspose);
disp(i) end
%Vector Quantize B
%Create cell structure to hold all the clustered arrays NoClustered = cell(1,SizeNo);
%loop through all the images and vector quantize each of them for i = 1:SizeNo
%get the vectors for each image
Bsimple = squeeze(B{i});
%transpose the vectors for each image
Btranspose = transpose(Bsimple); %vector quantize each image
release(VectorQuantizer);
NoClustered{i} = step(VectorQuantizer,Btranspose); disp(i) end
disp('quantized')
%histogram of outputs from vector quantization
%calculate the total number of clusters NumClusters = size(Clusters);
NumClusters = NumClusters(1); %create array to hold the resulting histograms Yes =
zeros(SizeYes,NumClusters);
%loop through all the images and calculate the histogram for each for i = 1:SizeYes
%convert the clustered array into the right data format
Y = double(YesClustered{1,i});
%perform histogram of each image [h,counts] = histcounts(Y,NumClusters);
ysize = size(Y);
ysize = ysize(2);
%convert the histogram into the relative freq of each cluster in each %image
Yes(i,:) = h/ysize; end
%create array to hold the resulting histograms No = zeros(SizeNo,NumClusters);
%loop through all the images and calculate the histogram for each for i = 1:SizeNo
%convert the clustered array into the right data format nope =
double(NoClustered{1,i}); %perform histogram of each image [h,counts] =
histcounts(nope,NumClusters);
nsize = size(nope); nsize = nsize(2);
%convert the histogram into the relative freq of each cluster in each
%image
No(i,:) = h/nsize; end disp('histo')
%create inputs for SVM Model
28
%array with with histogram information
%array contains info about water/nowater Size = SizeYes + SizeNo;
SvmData = zeros(Size,NumClusters); SvmLabel = zeros(Size,1);
for i = 1:SizeYes
SvmData(i,:) = Yes(i,:);
SvmLabel(i,1)= 1; end
for i = 1:SizeNo
SvmData(SizeYes + i,:) = No(i,:);
SvmLabel(SizeYes + i,1)= 0; end
%create SVM Model
SvmModel = fitcsvm(SvmData,SvmLabel);
%export SVM Model
%export cluster array save 'SvnModel.mat' SvmModel; save 'VectorQuantizer.mat'
VectorQuantizer; save 'NumClsuters.mat' NumClusters; save 'everything.mat'
29
Appendix E – Testing Code
%Main function to test each image
function [label] = testing(image)
addpath('Yes'); addpath('No'); addpath('testing');
%load the output variables from the training program load('SvnModel.mat');
load('VectorQuantizer.mat'); load('NumClsuters.mat');
%Read in image and convert to .pgm file
X = imread(image);
%resize image so that sift doesnt error out.
c = imresize(X, [1600,900]); imwrite(c,'tester.pgm'); %call Sift function on the image
[~, descriptors, locs] = sift('tester.pgm');
%call remove function
% [cleandes,cleanlocs] = removeNoise(descriptors,locs);
% newdes = cleandes;
%
for i = 1:size(newdes,1) %
newdes(i,:)=newdes(i,:)*cleanlocs(i,3);
%
%
end
%transpose the descriptors matrix so it can be quantized
descriptorsT = transpose(descriptors);
%Vector Quantization of image release(VectorQuantizer);
quantizedImage = step(VectorQuantizer,descriptorsT);
%Histogram
y = double(quantizedImage);
[h,counts] = histcounts(y,NumClusters);
% bins holds histogram data
ysize = size(y); ysize = ysize(2);
%Use SVM model to predict image
30
relativeFreqs = h/ysize;
label = predict(SvmModel,relativeFreqs);
%Report prediction
31
Appendix F – Remove Noise Function
%Removes SIFT vectors below magnitude X
function [newDesc,newLocs] = removeNoise(desc,locs)
%determines the total number of vectors
Size = size(locs);
Size = Size(1);
X=.5;
%Variable used to store the number of vectors with magnitude above X
newSize=0; for i =1:Size
%the array locs, column contains vector magnitude information if(locs(i,3) > X)
%locs(i,3);
%if the vector has a magnitude above X, then increment the counter
newSize =
newSize +1; end end
%generate empty arrays to store the data about the vectors that are larger
%than X
newLocs = zeros(newSize,4); newDesc = zeros(newSize,128);
%local counter to track how many vectors have been stored in the new
%arrrays a=1; for i =1:Size if(locs(i,3) > X)
%if the magnitude of the vector is above X, copy all the information
%corresponding
to that vector to the new array, then increment a
newLocs(a,:) = locs(i,:);
newDesc(a,:)
= desc(i,:);
a=a+1; end
end
%showkeys(image, newLocs); end
32
Appendix G - Confusion Matrix Code
clear;
%gather the name and location of all the images to be tested
YesPics = dir('testing/Yes/*.jpg'); %directory containing water photos
NoPics = dir('testing/No/*.jpg'); %directory containing no water photos
%TESTING = dir('testing/*.jpg'); addpath('testing'); addpath('testing/Yes'); addpath('testing/No');
%determine number of pictures to be tested
SizeYes = length(YesPics);
SizeNo = length(NoPics);
%SizeTesting = length(TESTING);
%clear variable and recreate it with the correct size clear('A');
A = cell(1,SizeYes+SizeNo);
%create a master list with all the image names for i = 1:SizeYes
%test each image and record the result in A
A{i} = testing(YesPics(i).name);
A{i+SizeYes} = testing(NoPics(i).name);
disp(i) end
%initialize the confusion matrix Confusion = zeros(2,2);
%sort the results into a confusion matrix for i=1:(SizeYes+SizeNo)
if(i < (SizeYes+1))
if(A{i} == 1)
%yes picture corectly classified
Confusion(1,1) = Confusion(1,1)+1;
else
%Yes picture incorrectly classified
Confusion(1,2) = Confusion(1,2) + 1;
end
else
if(A{i} == 1)
%no picture incorrectly classified
Confusion(2,1) = Confusion(2,1)+1;
else
%no picture correctly classified
Confusion(2,2) = Confusion(2,2) + 1;
end
end end
33
Appendix H - Field of View Calculations