04. Integer Programming - Operations Research: A Model
advertisement

4 Integer Programming
Natural occurrences of integer variables (e.g., the
number of buses allocated to a route, the number of
boxes of hardwood flooring purchased, etc. But also:
logical variables.
1950s: Gomory’s cutting plane techniques
Early 1960s: Land & Doig’s Branch-&-Bound
method.
4.1 Basic concepts.
P1: Max z = x1 + x2
s.t.
3x1 + 5x2 ≤ 15
5x1 + 2x2 ≤ 10
x1, x2 ≥ 0.
In addition, some or all variables must be integers.
These are additional requirements.
MILP: mixed-integer linear programming problems
AILP: all-integer linear programming problems.
(a)
(b)
(c)
(d)
Simple rounding will not do!
Example:
Max z = 2x1 + x2
s.t. 7x1 + 48x2 ≤ 84
x1 + 12x2 ≥ 3
x1,
x2 ≥ 0 and integer.
Optimal solution of LP relaxation:
x = (6.5455, 0.7955) with z = 13.8864,
while the optimal all-integer solution is
x = (5, 1) with z = 11.
No rounding can achieve this.
Change b2 from “3” to “13,” (broken line) the AILP
has no feasible solution.
On the other hand, some types of problems have
integer solutions naturally.
x1 + x2 ≤ 10
5x1 + 3x2 ≥ 15
x1
≤ 6
x2 ≤ 7
x1, x2 ≥ 0.
Extreme points (3, 0), (6, 0), (6, 4), (3, 7), (0, 7), & (0,
5).
Ignoring the integrality conditions & solving the LP
relaxation will result in an integer solution. Some large
classes of problems fall into this category.
z IP : Optimal objective value of the integer problem,
z LP : optimal objective value of the LP relaxation. Then
z IP ≤ z LP .
Absolute integrality gap z LP z IP ,
z LP z IP
relative integrality gap
.
max {| z LP | , | z IP |}
Earlier example: x LP = (6.5455, 0.7955) with z LP =
13.8864, & x IP = (5, 1) with z IP = 11.
Then: absolute integrality gap 13.8864 11 = 2.8864,
relative integrality gap is 2.8864/13.8864 = .2079.
Indicator of difficulty: relative integrality gap > 0.1:
difficult, if > 0.5: very difficult. This is, of course, only
known after the fact.
Another type of relaxation is the Lagrangean
relaxation PLagr. First, choose some or all of the given
structural constraints (the dualized constraints),
multiply them by some preselected nonnegative
constants (Lagrangean multipliers or dual variables)
and subtract them from the objective function. Then
the dualized constraints are removed from the set of
constraints.
Example: Refer to problem P4 and set up its
Lagrangean relaxation by dualizing the first
constraint, using the Lagrangean multiplier u1 = 2.
The relaxed problem is
1
PLagr
: Max z1Lagr = 10x1 + 10x2 – 2(3x1 + 5x2 – 15)
s.t. 5x1 + 2x2 ≤ 10
x1, x2 ≥ 0 and integer.
Optimal solution: x1 2 , x2 0 with z1Lagr 38 .
Alternatively, if we dualize the second constraint with,
say, a Lagrangean multiplier of u2 = 3, a different
relaxed problem results:
2
2
= 10x1 + 10x2 – 3(5x1 + 2x2 – 10)
PLagr
: Max z Lagr
s.t. 3x1 + 5x2 ≤ 15
x1, x2 ≥ 0 and integer,
which has an optimal solution of x1* 0 , x2* 3 with
*2
zLagr
42 .
We could also dualize both constraints. The objective
function is then Max 10x1 + 10x2 – u1(3x1 + 5x2 – 15) –
u2(5x1 + 2x2 – 10) subject to only the nonnegativity
constraints and the integrality requirements.
For multipliers u1 = 2 and u2 =1, the objective function
reduces to Max zLagr = –x1 – 2x2 + 40, with an optimal
solution x1 0 , x2 0 and z = 40. Choosing instead
multipliers u1 = 1 and u2 = 2 results in an objective
function Max zLagr = –3x1 + x2 + 35, which has
unbounded “optimal” solutions (x2 can be chosen
arbitrarily large).
The optimal objective value z Lagr is greater than or
equal to the value of the objective function of the
original (maximization) problem. The choice of
Lagrangean multipliers determines how close the gap
between z Lagr and z will be. In the context of linear
programming, selecting Lagrangean multipliers equal
to optimal values of the dual variables, the inequality
z Lagr z is actually satisfied as an equation. This idea
is used in a heuristic method in Section 4.3.3.
Integer variables either occur naturally or due to the
way we must formulate constraints. For instance,
logical variables are zero-one variables introduced to
model logical implications. In standard linear
programming, all constraints must hold.
However, if we have the choice of one of a number of
different machines, each with its own capacity, the
actual capacity constraint is not given by all machines,
but only by the machine that is chosen. We speak of an
either-or constraint. Another class is that of conditional
constraints. They can be spotted by the wording “if
this, then that.”
Formulate logical constraints by using a table. For two
zero-one variables y1 and y2, there are four solutions:
#
1
2a
2b
3
y1
0
0
1
1
y2
0
1
0
1
The table below shows the exclusion constraints that
allow excluding one specific solution without affecting
any of the others.
Solution Formulation
Wording
to be
excluded
1
y1 + y2 ≥ 1
“At least one of the two
activities needs to be chosen”
2a
y1 ≥ y2
“If activity y2 is chosen, then
activity y1 must also be
chosen”
2b
y1 ≤ y2
“If activity y1 is chosen, then
activity y2 must also be
chosen”
3
y1 + y2 ≤ 1
“At most one of the activities
can be chosen”
The table below shows all 8 solutions for 3 variables
#
1
2a
2b
2c
3a
3b
3c
4
y1
0
0
0
1
0
1
1
1
y2
0
0
1
0
1
0
1
1
y3
0
1
0
0
1
1
0
1
The table blow shows how each individual solution can
be excluded.
Sln to be Formulation
excluded
1
y1 + y2 + y3 ≥ 1
2a
2b
2c
3a
3b
3c
4
Wording
“At least one of the three
activities must be chosen”
y1 + y2 ≥ y3
“If neither y1 nor y2 are
chosen, then y3 must be
chosen”
y1 + y3 ≥ y2
“If neither y1 nor y3 are
chosen, then y2 must be
chosen”
y2 + y3 ≥ y1
“If neither y2 nor y3 are
chosen, then y1 must be
chosen”
–y1 + y2 + y3 ≤ 1 “If y1 is not chosen, then y2
and y3 must both be chosen”
y1 – y2 + y3 ≤ 1 “If y2 is not chosen, then y1
and y3 must both be chosen”
y1 + y2 – y3 ≤ 1 “If y3 is not chosen, then y1
and y2 must both be chosen”
y1 + y2 + y3 ≤ 2 “No more than two of the
three activities can be
chosen”
If more than a single solution is excluded, we combine
the pertinent logical constraints. For example, two
variables, excluding #1 and #2a is achieved by the
constraints y1 + y2 ≥ 1 and y1 ≥ y2 which can be
collapsed into the single constraint y1 = 1. Then replace
y1 by the value of 1 everywhere to reduce the size of
the model.
Another logical constraint may require an activity y0
to be chosen only if at least k activities in a set J = {y1,
y2, …, yn} are also chosen. This can be formulated as
y0 1k ( y1 y2 ... yn ) .
4.2 Applications of Integer Programming
Knapsack problems
Define variables yj = 1, if the item is included, & 0
otherwise.
Alternatively, yj: the number of items of type j that are
included, so that yj ≥ 0 and integer.
Cargo loading, capital budgeting.
Highrise Shopping Amusement Warehouses Airport
mall
park
Profit
contribution
(in m$)
Resource
consumption
10
6
12
2
7
4
2
5
1
3
Seven resource units are available.
P: Max z = 10y1 + 6y2 + 12y3 + 2y4 + 7y5
s.t.
4y1 + 2y2 + 5y3 + 1y4 + 3y5 7
y1, y2,
y3, y4, y5 = 0 or 1.
The LP relaxation has the optimal solution y 2 = 3.5,
y1 y3 y 4 y5 0 with the objective value z 21.
Optimal integer solution: y1 y 2 y 4 1, y3 y5 0
with objective value z = 18.
Even for simple problems, enumeration does not
work! n: number of variables, # slns = the number of
0-1 solutions (feasible or not).
n
# slns
1
21=1
2
22=4
3
23=8
4
24=16
40
240 ≈ 1 trillion
A computer that examines 1 quadrillion solutions per
second requires > 40 million years for a problem with
n = 100 variables.
4.2.1 Cutting Stock Problems (Trim Loss
Problems)
Given some material, change its shape from whatever
shape exists to whatever shape is needed.
Example: Wooden rods in standard profile & width.
Twenty 12 ft rods and twenty-five 10 ft rods are
available.
Sixty 8 ft rods, forty 5 ft rods, & seventy-five 3 ft rods
are needed.
Cut: 50¢ per cut
Purchase: $2, $1.50, & $1.10 for the 8 ft, 5 ft, and 3 ft
lengths.
Objective: Minimize waste (nonlinear! short pieces are
waste, long unused pieces may be used later) or
minimize cost.
Cutting plan:
Define variables yj as the number of times the j-th
pattern is cut. In addition, denote by v1, v2, & v3 the
number of 8 ft, 5 ft, and 3 ft rods that are purchased.
Min z = 1y1 + 1y2 + 1.5y3 + 1.5y4 + 0.5y5 + 0.5y6 + 1y7 +
1.5y8 + 2v1 + 1.5v2 + 1.1v3.
s.t. y1 + y2 + y3 + y4 ≤ 20.
y5 + y6 + y7 + y8 ≤ 25.
(supply constraints)
y1 + y5 + v1 ≥ 60.
2y2 + 1y3 + 2y6 + 1y7 + v2 ≥ 40.
1y1 + 2y3 + 4y4 + 1y7 + 3y8 + v3 ≥ 75.
(demand constraints)
(1)
(2)
(3)
(4)
(5)
y1, y2, …, y8; v1, v2, v3 ≥ 0 and integer.
Optimal solution: y1 = 2, y 2 = 0, y3 = 0, y 4 = 18, y5 =
5, y6 20, y7 = 0, and y8 = 0, as well as v1 = 53, v 2 = 0,
& v3 = 1. No rods are left over, the demand is exactly
satisfied.
2-dimensional cutting stock problems: same
formulation, cutting plans are more difficult to set up.
Material usage: pattern 1: 34/40 sq ft = 85%,
pattern 2: 32/40 sq ft = 80%.
However: pattern 1 requires frequent machine
adjustments. Also: guillotine cuts.
4.2.2 Diet Problem Revisited
Two foodstuffs, one nutrient.
Min z = 3x1 + 4x2
s.t.
x1 + 2x2 5
x1, x2 0.
plus: “if food 1 is in the diet, then food 2 should not be
included.
Define logical variables y1 (and y2) as one, if food 1
(food 2) is included in the diet, and zero otherwise.
y1
0
0
1
1
y2
0
1
0
1
OK?
No
A formulation that allows the first three cases &
prohibits the last case is
y1 + y2 1.
y1, y2 = 0 or 1.
Adding these constraints to the formulation is not
sufficient, though, as it allows the continuous variables
x1 & x2 to change independent of y1 and y2. We need
linking constraints. Here,
x1 My1 &
x2 My2,
with M >> 0 (but not too large, scaling).
Validity: If y1 = 1 (the food is included in the diet),
then the constraint reads x1 M, &, given that M is
sufficiently large, the constraint is redundant.
On the other hand, if y1 = 0 (the food is not included in
the diet), the constraint reads x1 ≤ 0, &, since x1 ≥ 0, x1
= 0 follows. In other words, if a food is not in the diet,
its quantity is zero.
Different additional (conditional) constraint:
“if food 1 is included in the diet, then food 2 must be
included in the diet as well.”
y1
0
0
1
1
y2 OK?
0
1
0 No
1
Here, the additional constraint
y1 y2
together with the linking constraints will do.
4.2.3 Land Use
Two choices for a parcel of land: harvest or protect
(but not both). Define variables y1= 1, if we harvest &
0 otherwise, & y2 = 1, if we protect, & 0 otherwise.
y1
0
0
1
1
y2 OK?
0
1
0
1 No
Again, the additional constraint is y1 + y2 ≤ 1. (There
are no other variables, so that there is nothing to link).
Allow 3 options: Harvest (y1), build a sanctuary (y2), or
allow the building of a municipal well (y3).
y1 y2 y3 OK?
0 0 0
0 0 1
0 1 0
1 0 0
0 1 1
1 0 1
No
1 1 0
No
1 1 1
No
Formulate: y1 + y2 ≤ 1 (eliminates the solutions in the
last two rows of the decision table), & the constraint
y1 + y3 ≤ 1 (eliminates the solution in the third row
from the bottom of the table).
4.2.4 Modeling Fixed Charges
Manufacture a combination of three Operations
Research texts:
Gabby and Blabby (GB),
Huff, Fluff, and Stuff (HFS), &
“Real OR” (ROR).
There are
3 printing machines are available (only 1 is needed),
2 binding machines (again, only one is needed).
Processing times for printing and binding machines
P1
GB 3
HFS 2
ROR 4
P2 P3
6 4
3 3
5 5
B4
GB 10
HFS 12
ROR 15
B5
10
11
14
The capacities of the three printing machines are 120
100, and 110 hours (7,200, 6,000, and 6,600 minutes).
Capacities of the binding machines: 333⅓ and 300
hours, respectively (or 20,000 and 18,000 minutes).
The costs to lease the machines are independent of the
number of books made with them. They are $10,000,
$8,000, $9,000, $20,000, and $23,000, respectively. The
profit contributions of the three books (other than the
leasing costs) have been identified as $40, $60, and $70.
Also, produce at least 500 copies of the landmark ROR
book in order to maintain a good academic image.
Define variables x1, x2 and x3 as the number of books
of the three types that are manufactured and sold.
Also, define binary variables y1, y2, …, y5 that assume a
value of one, if a machine is leased, and 0 otherwise.
P: Max z = 40x1 + 60x2 + 70x3
10,000y1 8,000y2 9,000y3 20,000y4 23,000y5
s.t. 3x1 + 2x2 + 4x3 7,200 + M(1−y1)
6x1 + 3x2 + 5x3 6,000 + M(1−y2)
4x1 + 3x2 + 5x3 6,600 + M(1−y3)
10x1 + 12x2 + 15x3 20,000 + M(1−y4)
10x1 + 11x2 + 14x3 18,000 + M(1−y5)
x3 500
y1 + y2 + y3 = 1
y4 + y5 = 1
x1, x2, x3 0 and integer
y1, y2, y3, y4, y5 = 0 or 1.
With M = 1,000,000, the optimal solution is y 2 = y 4 = 1
and y1 y3 y5 = 0 (i.e., we lease the second printing
and the first binding machine), and make x1 = 0 GB
books, x 2 = 1,039 HFS books, and x3 = 502 ROR books.
The profit associated with this plan is $69,480. Note
that the slack capacities indicate huge (and
meaningless) values for machines not leased. Their
right-hand side values have the artificial value of M =
1,000,000, from which nonexistent usage is subtracted.
Now allow more than one printing and/or binding
machine to be used. We now need additional variables
xij to denote books of type i processed on machine j:
P: Max z = 40x1 + 60x2 + 70x3
–10,000y1–8,000y2–9,000y3–20,000y4–23,000y5
s.t. x1 = x11 + x12 + x13
x2 = x21 + x22 + x23
x3 = x31 + x32 + x33
3x11 + 2x21 + 4x31 ≤ 7,200y1
6x12 + 3x22 + 5x32 ≤ 6,000y2
4x13 + 3x23 + 5x33 ≤ 6,600y3
10x14 + 12x24 + 15x34 ≤ 20,000y4
10x15 + 11x25 + 14x35 ≤ 10,000y5
x3 ≥ 500
y1 + y2 + y3 ≥ 1
y4 + y5 ≥ 1
x11 + x12 + x13 = x14 + x15
x21 + x22 + x23 = x24 + x25
x31 + x32 + x33 = x34 + x35
y1, …, y5 = 0 or 1
x1, x2, x3; x11, x12, …, x35 ≥ 0 and integer.
The objective function has not changed. The first three
constraints link xij and xi so that they define the
amounts of the products actually made. The next five
constraints are capacity constraints restricting the
number of units we can make by the machine
capacities (zero if we do not lease the machine). The
next constraint ensures that we make at least 500 units
of the ROR book, and the next two constraints specify
that we must choose at least one of each of the two
types of machines. The last three structural
constraints require books printed also to be bound.
The optimal solution is to lease the first printing
machine and both binding machines. As before, we
make no GB books, but 2,600 HFS books and 500 ROR
books. The only significant change is the increase of
HFS books from 1,039 to 2,600, resulting in a doubling
of the profit from $69,480 to $138,000.
4.2.5 Workload Balancing
Goal: Distribute the workload evenly. Tasks cannot be
split.
Example:
Processing times for worker-task combinations
T1
W1 5
W2 4
W3 7
T2
1
3
5
T3
9
8
6
T4
4
3
4
T5
9
8
7
Define variables yij = 1, if employee Wi is assigned to
task Tj, and zero otherwise.
Assign each task to exactly one employee.
y1j + y2j + y3j = 1 for all j = 1, ..., 5.
Actual working times of the employees:
w1 = 5y11 + 1y12 + 9y13 + 4y14 + 9y15,
w2 = 4y21 + 3y22 + 8y23 + 3y24 + 8y25, and
w3 = 7y31 + 5y32 + 6y33 + 4y34 + 7y35,
Possibility:
Min z = max {w1, w2, w3}.
Rewrite as
Min z, s.t. z ≥ w1, z ≥ w2, and z ≥ w3 + other constraints.
Min z
s.t. z ≥ 5y11 + 1y12 + 9y13 + 4y14 + 9y15
z ≥ 4y21 + 3y22 + 8y23 + 3y24 + 8y25
z ≥ 7y31 + 5y32 + 6y33 + 4y34 + 7y35
y11 + y21 + y31 = 1
y12 + y22 + y32 = 1
y13 + y23 + y33 = 1
y14 + y24 + y34 = 1
y15 + y25 + y35 = 1
yij = 0 or 1 for i=1, 2, 3; j=1, …, 5.
Solution: W1 – T2 & T5, W2 – T1 & T4, W3 – T3.
Workloads: 10, 7, and 6 hours.
Alternative: Min z
= ((1/3)w w1)2 + ((1/3)w w2)2 + ((1/3)w w3)2.
Always combine “equity” with an efficiency objective
(otherwise workloads of 12, 12, & 12 are preferred to
7, 8, 9).
4.3 Solution Methods for Integer
Programming Problems
4.3.1 Cutting Plane Methods
The first exact techniques for solving integer
programming problems were cutting plane techniques.
General idea: Solve linear programming relaxation, i.e.,
the given problem without integrality requirements.
If the optimal solution is integer, we are done.
Otherwise, introduce a cutting plane, i.e., an additional
constraint that (1) cuts off (i.e., makes infeasible) the
present optimal solution, while (2) not cutting off any
feasible integer point.
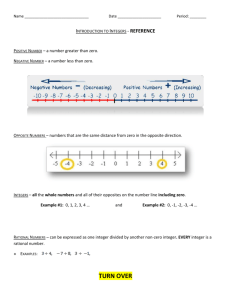
Example: Consider the all-integer programming
problem:
P: Max z = y1 + y2
s.t.
3y1 + 2y2 ≤ 6
y1 + 3y2 ≤ 3
y1, y2 ≥ 0 and integer.
The shaded area shows the feasible set of the linear
programming relaxation, and y LP = (12/7, 3/7) is the
optimal solution of the linear programming relaxation.
The triangle shown by the broken lines connecting (0,
0), (2, 0), and (0, 1) is the convex hull of the feasible set.
The dotted line is the cutting plane 5y1 + 10y2 ≤ 12. It is
indeed a cutting plane, as the present optimal solution
12, and since all four
y LP is cut off as 90/7 = 12 76
feasible integer points satisfy the condition & are thus
not cut off.
Computation performance of cutting planes has been
disappointing.
Example: We use a simple Dantzig cut, which does not
require any knowledge beyond the solution typically
provided by a solver. Other, more efficient, cutting
planes work on the same principle.
Given: an all-integer linear programming problem.
Include all slack and excess variables, so that all
constraints are equations. Let there be n nonnegative
variables (including the slack and excess variables)
and m structural equation constraints, and assume
that the present optimal solution of the linear
programming relaxation has at least one noninteger
component.
Separate the variables into two disjoint sets B and N,
where B includes all variables that are presently
positive, while N includes all variables that are
presently zero. If the solution is nondegenerate, the set
B will include exactly m variables, and the set N
exactly (n–m) variables. In case of primal degeneracy,
the set N will include more than (n – m) variables, in
which case we define N as any (n – m) variables
presently at zero.
A Dantzig cut requires the sum of all variables in the
set N to be at least “1.” Validity: (1) Since all variables
in the set N equal zero, the cutting plane invalidates
the present solution. (2) Any feasible solution to the
original integer problem will need to have at least one
variable in N assume a positive value, which, since this
is an all-integer optimization problem, must be at least
one. Hence, the sum of all the variables that are
presently zero, must be at least one.
Add the cut to the problem & re-solve the problem
(preferably with a warm start). Stop, if the new
solution is integer; else, repeat. The the process, the zvalue cannot increase (decrease) for max (min)
problems.
In each step, the feasible set shrinks. Unfortunately,
for Dantzig cuts, this is not necessarily finite.
Example: Consider the integer programming problem:
Max z = 3y1 + 2y2
s.t. 3y1 + 7y2 22
5y1 + 3y2 17
y1
2
y1,
y2 0 and integer.
Adding slack variables S1 and S2 and an excess
variable E3, we obtain the following formulation with
n = 5 variables and m = 3 structural constraints:
Max z = 3y1 + 2y2
s.t. 3y1 + 7y2 + S1
= 22
5y1 + 3y2 +
S2
= 17
y1 –
E3 = 2
y1, y2, S1, S2, E3 0 and integer.
The optimal solution is y1 2.0385 , y2 2.2692 ,
S1 S 2 0 , and E3 0.0385 with z 10.65385 . Here, N
= {S1, S2}, so that the Dantzig cut is
S1 + S2 ≥ 1
(or 8y1 + 10y2 ≤ 38). Subtracting a new excess variable
E4 from the left-hand side of this cut, we obtain S1 + S2
– E4 = 1. Adding this cut to the problem and solving it
again, we obtain the new solution y1 2.1538 ,
y2 2.0769 , S1 1, S 2 E4 0 and E3 0.1538 with an
objective value z 10.61539 . Clearly, another cut is
required. The sequence of cutting planes generated in
the process is shown in the table below.
Optimal solution
y1 2.0385 , y2 2.2692 , S1 0 , S2 0 ,
E3 0.0385 with z 10.65385 (optimal
solution of the LP relaxation).
y1 2.1538 , y2 2.0769 , S1 1, S2 0 ,
E3 0.1538 , E4 0 with z 10.61539 .
y1 2.2692 , y2 1.8846 , S1 2 , S2 0 ,
E3 0.2692 , E4 1, E5 0 with z 10.5769 .
y1 2.3846 , y2 1.6923, S1 3 , S2 0 ,
E3 0.3846 , E4 2 , E5 1, E6 0 with
z 10.53846 .
y1 2.5 , y2 1.5 , S1 4 , S2 0 , E3 0.5 ,
E4 3 , E5 2 , E6 1, E7 0 with z 10.5 .
y1 2.6154 , y2 1.3077 , S1 5 , S2 0 ,
E3 0.6154 , E4 4 , E5 3 , E6 2 , E7 1,
E8 0 with z 10.46154 .
y1 2.7308 , y2 1.1154 , S1 6 , S2 0 ,
E3 0.7308 , E4 5 , E5 4 , E6 3 , E7 2 ,
E8 1, E9 0 with z 10.42308 .
y1 2 , y2 2 , S1 2 , S 2 1, E3 0 with
z 10 (optimal all-integer solution)
Cutting plane
S1 + S2 ≥ 1 or
S1 + S2 – E4 = 1
S2 + E4 ≥ 1 or
S2 + E4 – E5 = 1
S2 + E5 ≥ 1 or
S2 + E5 – E6 = 1
S2 + E6 ≥ 1 or
S2 + E6 – E7 = 1
S2 + E7 ≥ 1 or
S2 + E7 – E8 = 1
S2 + E8 ≥ 1 or
S2 + E8 – E9 = 1
S2 + E9 ≥ 1 or
S2 + E9 – E10 =
1
Even for this toy example, a large number of cuts are
need to solve the problem. This is true in general.
“Deep cuts” are much better, but cannot compete with
“branch & bound methods” discussed next.
One could use the objective function to derive a cut:
Since all variables must be integer, the value of the
objective function z = 3y1 + 2y2 must also be integer.
The LP relaxation of the problem has an objective
value of z 10.65385 , hence z ≤ 10 must hold.
A cutting plane is then 3y1 + 2y2 + S4 = 10. Solving the
problem with this added constraint results in the
solution y1 3.3333 , y2 0 , S1 12 , S 2 0.3333,
E3 1.3333 and S4 0 with z = 10. (Since the
objective value has not changed, we presently
encounter dual degeneracy).
The next cutting plane is then y2 + S4 ≥ 1, (or,
alternatively, 3y1 + y2 + S5 = 9). Adding the cut results
in an optimal solution y1 2.6667 , y2 1, S1 7 ,
S2 0.6667 , E 3 0.6667, S 4 S5 0 , with z 10.
The next cut is S4 + S5 ≥ 1, or, rewritten in terms of the
original variables and the new slack variable S6, it is
written as 6y1 + 3y2 + S6 = 18. The optimal solution is
then y1 y2 2 , S1 2 , S 2 1, E3 S 4 0 , S5 1,
S6 0 , with z 10 . This solution is an integer
optimum. The cuts are shown in the figure below.
4.3.2 Branch-and-Bound Methods
These methods are very flexible & are applicable to
AILP & MILPs.
Idea: Starting with the LP relaxation, subdivide the
problem into subproblems, whose union includes all
integer solutions that are not worse than the best
known integer solution.
For instance, if presently y3 = 5.2, we subdivide the
problem (the “parent”) by adding the constraint y3 ≤ 5
& y3 ≥ 6, respectively (thus creating “children”).
Example:
Max z = 5y1 + 9y2
s.t.
5y1 + 11y2 94
Constraint I
10y1 + 6y2 87
Constraint II
y1 , y2 ≥ 0 and integer.
Solution Tree
Note: Each node of the solution tree represents one
linear program.
The constraints at a node are all original constraints
plus all additional constraints between the root of the
tree & the node in question.
As we move down the tree, the problems get to be
more constrained & thus their objective values cannot
improve.
At any stage, the problem to be worked on is the
“best” active node (whose z-value is the present upper
bound (for max problems, lower bound for min
problems)), the best known integer solution is the
present lower bound (for max problems, upper bound
for min problems).
Different modes: fully automatic (specify integrality
conditions & let the optimizer do its thing), fully
manual (manually construct the solution tree & solve
the LPs graphically), or semi-automatic (manually
construct the solution tree, whose LP solutions are
obtained by some LP solver).
Same example:
If the IP problem has no feasible solution:
P: Max z = y1 + 4y2
s.t. 28y1 + 7y2 ≤ 49
30y1 6y2 ≥ 36
y1, y2 ≥ 0 and integer.
4.3.3 Heuristic Methods
Knapsack problem:
P: Max z = 12y1 + 20y2 + 31y3 + 17y4 + 24y5 + 29y6
s.t.
2y1 + 4y2 + 6y3 + 3y4 + 5y5 + 5y6 19
y1,
y2,
y3,
y4,
y5, … y6 = 0 or 1.
Greedy Method
“Value per weight” of the individual items
Variable y1
Value
12/2
per
=6
weight
Rank
1
y2
y3
y4
y5
y6
20/4 31/6 = 17/3 = 24/5 = 29/5 =
= 5 5.1667 5.6667 4.8
5.8
5
4
3
6
2
Idea: Increase the values of variables one by one,
starting with the highest rank, as long as resources are
available.
Solution: y = [y1, y2, y3, y4, y5, y6] = [1, 0, 1, 1, 0, 1] with
resource consumption 16 & z-value 89.
Swap method:
First swap move:
Leaving Entering New
ΔR
Δz
variable variable solution
y1
y2
0, 1, 1, 2 + 4 12 + 20
1, 0, 1 = +2 = + 8
New solution y = [0, 1, 1, 1, 0, 1] with resource
consumption 18 & z-value 97.
Further swap moves (terminate whenever no local
improvements are possible):
Leaving Entering New
ΔR
Δz
variable variable solution
y2
y1
1, 0, 1, 4 + 2 20 + 12
1, 0, 1 = 2
= 8
y2
y5
0, 0, 1, 4 + 20 + 24
1, 1, 1 5 = 1
= +4
New solution y = [0, 0, 1, 1, 1, 1] with resource
consumption 19 & z-value 101.
Leaving Entering New
ΔR
Δz
variable variable solution
y3
y1
1, 0, 0, 6+2 = 4 31+12 =
1, 1, 1
19
y3
y2
0, 1, 0, 6+4 = 2
31+20 =
1, 1, 1
11
y4
y1
1, 0, 1, 3 + 2 = 17 + 12 =
0, 1, 1
1
5
y4
y2
0, 1, 1, 3+4 = +1:
0, 1, 1 infeasible
y5
y1
1, 0, 1, 5+2 = 3
24+12 =
1, 0, 1
12
y5
y2
0, 1, 1, 5+4 = 1 24+20 = 4
1, 0, 1
y6
y1
y6
y2
1, 0, 1,
1, 1, 0
0, 1, 1,
1, 1, 0
5+2 = 3
29+12 =
17
5+4 = 1 29+20 = 9
No further improvements are possible, stop!
Note: Greedy alone may result in very poor solutions.
Example:
P: Max z = 10y1 + 8y2 + 7y3
s.t.
54y1 + 48y2 + 47y3 100
y1,
y2,
y3 = 0 or 1.
Greedy solution: y = [1, 0, 0] with resource
consumption 54 & z-value 10.
Optimal solution: y = [0, 1, 1] with resource
consumption 95 & z-value 15.
Another heuristic uses Lagrangean relaxation (see
Section 4.2). Given an IP problem PIP with some
objective function z. Set up the Lagrangean relaxation
PLagr of PIP by dualizing its i-th constraint using a
Lagrangean multiplier uˆi , obtaining the objective
function z Lagr z uˆi (ai1 y1 ai 2 y2 ... ain yn bi ) .
Denote an optimal solution to PIP by ( y1 , y2 ,..., yn ; z )
and an optimal solution to PLagr by ( yˆ1 , yˆ 2 ,..., yˆ n ; zˆLagr ) .
Whether or not the optimal solution to PLagr is feasible
for PIP, denote by ẑ the objective function value for PIP
with the point ( yˆ1 , yˆ 2 ,..., yˆ n ) inserted. Since
( yˆ1 , yˆ 2 ,..., yˆ n ) is optimal for PLagr , we have
zˆLagr zˆ uˆi (ai1 yˆ1 ai 2 yˆ 2 ... ain yˆ n bi ) ≥
z uˆi (ai1 y1 ai 2 y2 ... ain yn bi ) , which, in turn, is
greater than or equal to z (since uˆi 0 and
ai1 y1 ai 2 y2 ... ain yn bi 0 due to the assumption of
feasibility of PIP). We have now established the
relationship zˆLagr z from Section 4.1.
Consider
now
the
effect
of
the
term
uˆi (ai1 y1 ai 2 y2 ... ain yn bi ) on the relaxed objective
function zLagr. If (y1, y2, …, yn) is feasible for PIP, the
expression in brackets will be negative, so that
multiplying it with uˆi , where uˆi 0 , results in a
positive contribution. If, on the other hand, (y1, y2, …,
yn) is not feasible for PIP, the term will cause a negative
contribution to the value of zLagr.
Hence we have penalized the value of zLagr and the
value of this penalty is uˆi (ai1 y1 ai 2 y2 ... ain yn bi ) ,
and the larger the value of the Lagrangean multiplier
uˆi , the larger the magnitude of this penalty. Since we
are maximizing zLagr, the optimization process tends to
favor points (y1, y2, …, yn) that are feasible for PIP, and
this tendency will be stronger with larger values of
uˆi 0 ; for very large values of uˆi , the resulting
( yˆ1 , yˆ 2 ,..., yˆ n ) will therefore be feasible as long as
feasible solutions to PIP exist.
Heuristic procedure: Start with some arbitrary value
of uˆi 0 , and solve the corresponding relaxation PLagr.
If the solution is feasible for PIP, uˆi 0 will be reduced
and PLagr solved again. If, on the other hand, the
solution is not feasible for PIP, increase uˆi 0 , and
solve PLagr again.
This process can be applied to any number of
constraints rather than just a single constraint as in
this example.
Example: Consider the assignment problem from
Section 2.2.7 with a maximization objective:
P: Max z = 4x11 + 3x12 + 1x13 + 8x21 + 5x22 + 3x23 +
2x31 + 6x32 + 2x33
s.t. x11 + x12 + x13
x21 + x22 + x23
x31 + x32 + x33
=1
=1
=1
x11 + x21 + x31
x12 + x22 + x32
x13 + x23 + x33
=1
=1
=1
x11, x12, x13, x21, x22, x23, x31, x32, x33 ≥ 0.
In addition to the usual constraints, we add the
constraint
2x11 + 3x12 + x13 + 4x21 + 6x23 + 5x32 + 2x33 ≤ 8.
This is a complicating constraint, as due to its
inclusion, the nice properties of the problem (such as
integrality of all extreme points) vanishes. An obvious
way to deal with this complication is to dualize the
complicating constraint and solve the resulting
(simple) assignment problem.
Without the complicating constraint, the unique
optimal solution is x13 x21 x32 1, and xij 0
otherwise, with z 15 . (This solution does not satisfy
the complicating constraint).
Dualizing
the
additional
constraint
as
uˆ (2 x11 3x12 x13 4 x21 6 x23 5x32 2 x33 8) , we add
this penalty term to the objective function of the
original problem. Using the dual variable uˆ ½ and
solving the Lagrangean relaxation, we obtain
xˆ13 xˆ21 xˆ32 1, and xˆij 0 otherwise. This is the
same solution obtained for the assignment problem
without the complicating constraint, so that the
additional constraint is still violated.
Concluding that the value of the dual variable must be
increased, we arbitrarily set uˆ : 5 . The unique optimal
solution to the relaxed problem is then
xˆ13 xˆ22 xˆ31 1 and xˆij = 0 otherwise, with z = 8. This
solution satisfies the additional constraint and is
therefore feasible to the original problem.
Try a value between û = ½ and û = 5, e.g., uˆ 1. The
resulting relaxed problem then has the unique optimal
solution xˆ11 xˆ22 xˆ33 1, and xˆij 0 otherwise, with z
= 11. This solution is feasible for the original problem.
We may continue with penalty values between ½ and
1, but terminate the process at this point. (Actually,
the solution happens to be optimal).
Alternatively, we could have dualized all six
assignment problem constraints and solved the
Lagrangean relaxation, which would then be a
knapsack problem. Since we are maximizing and since
all coefficients are nonnegative, we may write the six
assignment constraints as “≤” constraints:
P: Max z = 4x11 + 3x12 + 1x13 + 8x21 + 5x22 + 3x23 +
2x31 + 6x32 + 2x33
– u1(x11 + x12 + x13 – 1)
– u2(x21 + x22 + x23 – 1)
– u3(x31 + x32 + x33 – 1)
– u4(x11 + x21 + x31 – 1)
– u5(x12 + x22 + x32 – 1)
– u6(x13 + x23 + x33 – 1)
s.t. 2 x11 3x12 x13 4 x21 6 x23 5x32 2 x33 8
xij = 0 or 1 for all i, j.
We must simultaneously choose dual variables u1, u1,
…, u6. The resulting relaxation is an integer problem
which is typically not easy to solve. (In the previous
approach, the relaxation could be solved as an LP, it
always had integer solutions).
Arbitrarily choose uˆ1 uˆ2 ... uˆ6 ½, which results in
the objective function zLagr = 3x11 + 2x12 + 7x21 + 4x22 +
2x23 + x31 + 5x32 + x33 + 3. Maximizing this objective
function subject to the knapsack constraints results in
the solution xˆ11 xˆ21 xˆ22 xˆ31 xˆ33 1, and xˆij = 0
otherwise. This solution violates the second, third, and
fourth of the six assignment constraints, so that we
increase the penalty parameters for the violated
constraints to, say, uˆ2 uˆ3 uˆ4 5 .
The resulting knapsack problem, has an optimal
solution xˆ12 xˆ32 1 and xˆij 0 otherwise. This
solution violates only the fifth constraint in the
original problem. At this point, we could just increase
the value of uˆ5 and the process will continue.
The above example demonstrates that (1) it is not
always apparent beforehand which approach (i.e.,
dualizing which constraints) is preferable, and (2)
which values of the dual variables will result in quick
convergence. Actually, choosing good values for the
dual variable is more of an art than a science.