ece3528-sup-0001-Appendices
advertisement

Supporting Information
Appendix S1........................................................................................................................ 2
The Pareto front is the locus of all points in which the gradients of the performance
functions are positive-linearly dependent ....................................................................... 2
Appendix S2...................................................................................................................... 10
The Pareto front associated with 2 tasks in a 2D-mirphospace is a hyperbola ............. 10
Appendix S3...................................................................................................................... 16
The Pareto front of 2 tasks in an n-dimensional morphospace has hyperbolic
projections ..................................................................................................................... 16
Appendix S4...................................................................................................................... 19
Calculation of the deviation of the Pareto front from a straight line for 2 tasks in a 2Dmorphospace ................................................................................................................. 19
Appendix S5...................................................................................................................... 22
Each Pareto front of 2 tasks in a 2D morphospace is generated by a 1-dimensional
family of norm-pairs ..................................................................................................... 22
Appendix S6...................................................................................................................... 38
Generally, for 3 tasks in a 2D morphospace, the norms can be uniquely determined by
the shape of the Pareto front ......................................................................................... 38
Appendix S7...................................................................................................................... 43
The boundary of the 3-tasks Pareto front is composed of the three 2-tasks Pareto fronts
....................................................................................................................................... 43
Appendix S8...................................................................................................................... 55
1
The resulting Pareto front when one of the performance function is maximized in a
region ............................................................................................................................ 55
Appendix S9...................................................................................................................... 58
Bounds on the Pareto front for general performance functions show that normally it is
located in a region close to the archetype ..................................................................... 58
Appendix S10.................................................................................................................... 63
The Pareto front of r strongly concave performance functions is a connected set of
Hausdorff dimension of at most r-1. ............................................................................. 63
References ......................................................................................................................... 67
Appendix S1
The Pareto front is the locus of all points in which the gradients of the performance
functions are positive-linearly dependent
In this appendix we will analytically calculate the Pareto front for a system that needs to
perform r tasks in an n-dimensional morphospace V. Each performance function has a
single maximum - the archetype 𝑣𝑖∗ , and it decreases monotonically with the distance
from the archetype, where the distance is derived from a general inner-product norm.
Each performance function may depend on a different inner product norm.
⇒ The performance at task i is Pi (v) pi ( v vi*
2
i
) , where v vi*
2
i
(v v*i )T M i (v v*i )
, M i is a positive definite matrix, and Pi is a monotonically decreasing function of a
single argument.
We say that v is Pareto optimal relative to P1 ,..., Pr , if for every v ' v there exists
j 1,..., n such that p j ( v v*j
2
j
) p j ( v ' v*j
2
2
j
) . Since P1 ,..., Pr are monotonically
decreasing with their argument, it is equivalent to say that 𝑣 is Pareto optimal relative to
P1 ,..., Pr if for every v ' v there exists j 1,..., n such that v ' v*j
Denote Di (v) v vi*
2
i
2
j
v v*j
2
j
.
. The Pareto front associated with P1 ,..., Pr is exactly the same as
the Pareto front associated with D1 ,..., Dr . Hence, from now on, without loss of
generality, we will assume that Pi (v) Di (v)
Here we will show that the Pareto front associated with r tasks in an n-dimensional
morphospace V is given by all points 𝑣 for which:
r
(I) i 0 , i 0 , s.t.
i 1
r
M (v v ) 0 .
i 1
i
i
*
i
Note that since Pi (v) (v v*i )T M i (v v*i ) , this is equivalent to
r
P (v ) 0 .
i 1
i
i
For the rest of this Appendix we will denote gi : Pi (v) .
In this Appendix, we will regard V as an inner-product space, using the standard
Euclidean inner product (using the standard basis of measured traits). Do not be confused
with the inner products associated with each performance function Pi , which is only used
to define Pi by measuring distance from the respective archetype 𝑣𝑖∗ .
To show that if v is Pareto optimal it satisfies property (I), we will rely on a theorem from
a paper by Gerstenhaber(4). Our approach is to show that if v does not satisfy property
(I), it is not Pareto optimal. Note that if v does not satisfy property (I) then i : gi 0 , as
if i : gi 0 , then property (I) will be satisfied by choosing: i 1 , j i : j 0 .
Here are some relevant definitions quoted from (ref):
The halfline generated by the vector u V is the set of all points {u | 0} .
3
The convex polyhedral cone framed by u1 ,..., ur V is the convex hull of their respective
halflines.
Note that this is equivalent to the set of all non-negative linear combinations
r
{ i ui | i 0} .
i 1
Let A be a convex polyhedral cone. L(A) is defined to be the convex hull of all linear
subspaces contained in A.
l(A) is the dimension of L(A).
A convex polyhedral cone A is said to be pointed if 𝑙(𝐴) = 0.
Note that A is pointed if and only if L(A) does not contain a nontrivial full line (a 1dimensional linear subspace), if and only if A does not contain a full line.
Lemma 1: A convex polyhedral cone A framed by g1 ,..., g r is pointed if and only if
g1 ,..., g r do not satisfy property (I)
Proof:
1. “Only if”: If A is not pointed, it contains a full line spanned by the vector 𝑥 ≠ 0. It
means that both x and -x are in A.
r
x A x i gi with i 0 .
i 1
r
x A x i g i with i 0 .
i 1
4
r
r
r
i 1
i 1
i 1
0 x x i gi i gi ( i i ) gi
i 0, i 0 i i 0
r
As x 0 , not all i are zero, and not all i are zero i 0 and
i 1
r
r
r
i 1
i 1
i 1
r
i 1
i
0
( i i ) i i 0 .
We showed that g1 ,..., g r satisfy property (I).
Hence, if g1 ,..., g r do not satisfy property (I), A is pointed
r
2. “If”: If g1 ,..., g r satisfy property (I), there exist 1 ,..., r 0, i 0 such that
i 1
r
g
i 1
i
0 . Choose i such that i 0 . Denote x i gi . Then x 0 .
i
x A by
definition.
r
j 1
j i
j
g j i gi x .
r
g
j 1
j i
j
j
A by definition x A .
x 0, x A and x A A contains the non-trivial full line: { x | } A is not
pointed.
Hence, if A is pointed, g1 ,..., g r do not satisfy property (I) ∎
5
According to theorem 17 in (ref), a convex polyhedral cone A is pointed if and only if
there exists a half plane H V such that, except for the origin, A is contained in the
interior of H.
The interior of a half plane is defined as {x | h x 0} , where h is the unit vector
perpendicular to the hyperplane separating the space into 2 halves.
Note that for a convex polyhedral cone 𝐴 framed by nonzero vectors g1 ,..., g r , and for
every vector h:
(0 x A : x h 0) i : gi h 0 .
“ ” is trivial, as gi A
r
r
i 1
i 1
“ ” stems from the fact that 0 x A, ( i 0, i 0) such that x i gi
Putting together all of the above, we get:
g1 ,..., g r do not satisfy property (I) ⇔
The convex polyhedral cone A framed by g1 ,..., g r is pointed ⇔
There exists a half plane H V such that, except for the origin, A is contained in the
interior of H ⇔
There exists a vector h such that i : h gi 0 (note that i : gi 0 )
Claim 1: If there exists a vector ℎ, such that i : h gi (v) 0 , then v is not Pareto optimal.
Proof: Consider a vector v ' v h . The performance of task i of v’ is
Pi (v ') Pi (v h) . Since Pi is smooth, we can approximate:
6
Pi (v h) Pi (v) h Pi (v) O( 2 ) Pi (v) h g i O ( 2 )
By assumption, h gi 0 so for small enough , i : Pi (v ') Pi (v) .
This implies that v is not Pareto optimal, as required.
From all of the above we can deduce that if g1 (v),..., g r (v) do not satisfy property (I), v is
not Pareto optimal.
Note that we’ve shown that a Pareto optimal point must satisfy property (I), without
using any prior assumptions on the nature of the performance functions Pi (v) , beside
differentiability.
On the other hand, if a point 𝑣 satisfies property (I), it is Pareto optimal:
Consider the following function ( i are given by property (I)):
r
r
i 1
i 1
f (u ) i Pi (u ) i (u vi* )T M i (u vi* )
r
r
v is an extreme point of f as ( f )(v) i Pi (v) i gi (v) 0 .
i 1
i 1
f has a single maximal point, since:
r
r
r
i 1
i 1
i Pi (v) i (u vi* )T M i (u vi* ) 2 i M i (u vi* ) 0
i 1
7
implies
r
vmax ( i M i ) 1 ( i M i vi* )
i 1
(∑𝑖 𝛼𝑖 𝑀𝑖 is positive-definite as all 𝑀𝑖 are positive definite, all 𝛼𝑖 are non-negative and not
all of them are zero, which implies ∑𝑖 𝛼𝑖 𝑀𝑖 is also invertible). And r
r
i 1
i 1
2 i Pi (v) i M i
which is the negative of a positive definite matrix, and hence a negative definite matrix
vmax is a maximum. Also notice that vmax is a global maximum since f is defined
continuously on the entire space and has a single extremum.
r
So if v satisfies property (I) it maximizes
P
i i
i 1
(i.e. v vmax ). If it is not Pareto optimal,
it means that there is a point v ' v such that i : Pi (v) Pi (v ') and since i : i 0 we
get
r
r
i 1
i 1
i Pi (v) i Pi (v ') , in opposed to the maximality of v. So if v satisfies property
(I), it is Pareto optimal. ∎
Conclusion 1: 𝑣 is Pareto optimal v satisfies property (I) ⇔ there exists no vector h
such that i : h gi 0 .
Conclusion 2: v is Pareto optimal v satisfies property (I) v maximizes
r
P (u)
i 1
(with i given by property (I)).
8
i i
In other words, the set of Pareto optimal points equals the set of all points 𝑣 for which
r
there exist i 0, i 0 , such that
i 1
r
P (v ) 0
i 1
i
i
𝛼𝑖
Note that as ∑𝑟𝑖=1 𝛼𝑖 ≠ 0, we can define 𝛽𝑖 = ∑𝑟
𝑖=1 𝛼𝑖
∑𝑟𝑖=1 𝛼𝑖 𝛻𝑃𝑖 (𝑣) = 0 ⇔
1
∑𝑟 𝛼 𝛻𝑃𝑖 (𝑣)
∑𝑟𝑖=1 𝛼𝑖 𝑖=1 𝑖
. Then 𝛽𝑖 ≥ 0, ∑𝑟𝑖=1 𝛽𝑖 = 1, and:
= 0 ⇔ ∑𝑟𝑖=1 𝛽𝑖 𝛻𝑃𝑖 (𝑣) = 0
Hence, ∃𝛼𝑖 ≥ 0, ∑𝑟𝑖=1 𝛼𝑖 > 0 s.t. ∑𝑟𝑖=1 𝛼𝑖 𝛻𝑃𝑖 (𝑣) = 0
⇔ ∃ 𝛼𝑖 ≥ 0, ∑𝑟𝑖=1 𝛼𝑖 = 1, s.t. ∑𝑟𝑖=1 𝛼𝑖 𝛻𝑃𝑖 (𝑣) = 0
Thus, the set of Pareto optimal points equals the set of all points 𝑣 for which there exist
𝛼𝑖 ≥ 0, ∑𝑟𝑖=1 𝛼𝑖 = 1, such that ∑𝑟𝑖=1 𝛼𝑖 𝛻𝑃𝑖 (𝑣) = 0
We consider performance functions of the form 𝑃𝑖 (𝑣) = (𝑣 − 𝑣𝑖∗ )𝑇 𝑀𝑖 (𝑣 − 𝑣𝑖∗ ) ⇒
𝛻𝑃𝑖 (𝑣) = 𝑀𝑖 (𝑣 − 𝑣𝑖∗ ). Hence,
𝑟
𝑟
∑ 𝛼𝑖 𝛻𝑃𝑖 (𝑣) = 0 ⇒ ∑ 𝛼𝑖 𝑀𝑖 (𝑣 − 𝑣𝑖∗ ) = 0 ⇒ 𝑣 = (∑ 𝛼𝑖 𝑀𝑖 )
𝑖=1
𝑖
𝑖=1
−1
(𝛼𝑖 𝑀𝑖 𝑣𝑖∗ )
Conclusion 3: The set of Pareto optimal points, associated with 𝑃1 , … , 𝑃𝑟 is given by:
{(∑𝑖 𝛼𝑖 𝑀𝑖 )−1 ∑𝑖(𝛼𝑖 𝑀𝑖 𝑣𝑖∗ ) |𝛼𝑖 ≥ 0, ∑3𝑖=1 𝛼𝑖 = 1}
9
Appendix S2
The Pareto front associated with 2 tasks in a 2D-mirphospace is a hyperbola
We would like to prove that the Pareto front associated with 2 tasks in a 2-dimensional
morphospace is a section of a hyperbola or a line. As explained in Appendix S1, the
performance of task 𝑖 is taken to be:
𝑃𝑖 = −(𝑣 − 𝑣𝑖∗ )𝑇 𝑀𝑖 (𝑣 − 𝑣𝑖∗ )
Where 𝑀𝑖 is a positive-definite 2× 2 matrix, and 𝑣𝑖∗ = (𝑥𝑖∗ , 𝑦𝑖∗ ) is the archetype for task 𝑖.
Positive definite matrices have positive eigenvalues and are Hermitian, and thus 𝑀𝑖 can
be diagonalized by a rotation matrix. Thus
𝜆𝑖,1 ²
𝑀𝑖 = 𝑅(𝜃𝑖 ) (
0
0
𝜆𝑖,2 ²
) 𝑅(−𝜃𝑖 ) ,
where 𝑅(𝜃) is an orthogonal matrix (rotation matrix by angle 𝜃) and 𝜆𝑖,1 > 0, 𝜆𝑖,2 > 0
(i.e. real and non-zero).
Note: The contours of such performance functions 𝑃𝑖 are concentric ellipses with
𝜆
eccentricity 𝜆 = 𝜆𝑖,2 which are rotated by an angle of 𝜃 relative to the y axis. These
𝑖,2
contours and their parameters are widely used in the main text.
As will be explained immediately, we can assume without loss of generality that:
1. 𝑀1 = I, implying - (𝑣 − 𝑣1∗ )𝑇 𝑀1 (𝑣 − 𝑣1∗ ) = (𝑣 − 𝑣1∗ )𝑇 (𝑣 − 𝑣1∗ ) .
2. 𝑣1∗ = (0,0)
3. 𝑣2∗ = (1,0)
4. One of 𝑀2 ′𝑠 eigenvalues is 1.
Those assumptions will be true in a rotated, translated and rescaled coordinate system.
We will show that the Pareto front is a hyperbola. Since a hyperbola remains a hyperbola
under such transformations, and all such transformations are invertible, it is enough to
work in the coordinate system where the above assumptions hold.
10
The first and second assumptions are satisfied by the transformation 𝑣 → 𝑇𝑟(𝑣1∗ )𝑇1 𝑣
where:
𝑇1 = 𝑅(𝜃1 )
(
1
𝜆𝑖,1
0
0
1
𝜆𝑖,2
)
(then translate such that 𝑣1∗ is at (0,0), rotate such that 𝑀1 is diagonal, and then scale such
that 𝑀1 = 𝐼).
Under the above transformation, the second archetype moves to:
̃
{Δ𝑥
̃ } = 𝑇1−1 (𝑣2∗ − 𝑣1∗ )
Δ𝑦
The third assumption is satisfied, while keeping assumptions 2, and keeping 𝑀1 scalar by
further applying:
𝑇2 = (
̃
Δ𝑥
̃
Δ𝑦
̃
−Δ𝑦
)
̃
Δ𝑥
(Move the second archetype to the 𝑥 axis and then scale it to be at (1,0)).
̃ ≠ 0 or Δ𝑦
̃ ≠0
This transformation is invertible since Δ𝑥
We apply the transformation 𝑣 → 𝑇2 𝑇1 𝑣.
In this coordinate system:
2
̃ 2 + Δ𝑦
̃ 2 )𝑣 𝑇 𝑣
The functional ‖𝑣 − 𝑣1∗ ‖1 becomes ‖𝑇2 𝑇1 𝑣 − 𝑣1∗ ‖12 = (Δ𝑥
𝑇
2
The functional ‖𝑣 − 𝑣2∗ ‖2 becomes ‖𝑇2 𝑇1 𝑣 − 𝑣2∗ ‖22 = (𝑣 − (1,0)) 𝑀(𝑣 − (1,0))
Where 𝑀 = (𝑇2 𝑇1 )𝑇 𝑀2 𝑇2 𝑇1
Since 𝑀2 is positive definite and 𝑇2 𝑇1 is invertible, 𝑀 is positive definite.
𝜆12
→ 𝑀 = 𝑅(𝜃) (
0
0
) 𝑅(−𝜃), with 𝜆1 > 0, 𝜆2 > 0
𝜆22
11
Finally, assumption 1 and 4 are reached by using the following lemma:
Lemma 1: The Pareto front is invariant to scaling of any of the norms
Proof: 𝑣 is Pareto optimal with respect to 𝑃1 (𝑣), 𝑃2 (𝑣) if for every 𝑣 ′ ≠ 𝑣 there exists 𝑗 ∈
2
2
𝑗
𝑗
{1,2} such that ‖𝑣 − 𝑣𝑗∗ ‖ < ‖𝑣 ′ − 𝑣𝑗∗ ‖ . Let 𝛽𝑗2 > 0 be a constant for each 𝑗 ∈ {1,2}.
2
2
2
2
𝑗
𝑗
‖𝑣 − 𝑣𝑗∗ ‖ < ‖𝑣 ′ − 𝑣𝑗∗ ‖ ⇔ 𝛽𝑗2 ‖𝑣 − 𝑣𝑗∗ ‖ < 𝛽𝑗2 ‖𝑣 ′ − 𝑣𝑗∗ ‖ , which means that the
𝑗
𝑗
norm-pairs {𝛽𝑗2 ‖𝑣 −
2
𝑣𝑗∗ ‖ }
𝑗
and {‖𝑣 −
1
2
𝑣𝑗∗ ‖ }
𝑗
result in the same Pareto front. ∎
1
We choose 𝛽12 = (Δ𝑥
and 𝛽22 = 𝜆2 and we get that
̃ 2 +Δ𝑦
̃ 2)
1
2
̃ 2 + Δ𝑦
̃ 2 )𝑣 𝑇 𝑣 , (𝑣 − (1,0))𝑇 𝑅(𝜃) (𝜆1
(Δ𝑥
0
0
) 𝑅(−𝜃)(𝑣 − (1,0)) results in the same
𝜆22
Pareto front as
1
𝑇
𝑣 𝑇 𝑣 , (𝑣 − (1,0)) 𝑅(𝜃) (0
0
𝜆22
) 𝑅(−𝜃)(𝑣 − (1,0)). Denote 𝜆2 =
𝜆21
𝜆22
𝜆21
.
To conclude, we can assume without loss of generality that:
2
||𝑣 − 𝑣𝑖∗ ||𝑖 = (𝑣 − 𝑣𝑖∗ )𝑇 𝑀𝑖 (𝑣 − 𝑣𝑖∗ ) = (𝑣 − 𝑣𝑖∗ )𝑇 𝑅(𝜃) (
1 0
) 𝑅(−𝜃)(𝑣 − 𝑣𝑖∗ )
0 𝜆2𝑖
With 𝑣1∗ = (0,0), 𝑣2∗ = (1,0), 𝜆12 = 1, 𝜆22 = 𝜆2
As seen in Appendix S1 (conclusion 1), the Pareto front associated with 2 tasks is given
by:
{𝑣 | ∃ 0 ≤ 𝛼 ≤ 1 𝑠. 𝑡. 𝛼𝑔1 (𝑣) + (1 − 𝛼)𝑔2 (𝑣) = 0}
Where 𝑔𝑖 = 𝛻𝑃𝑖 (𝑣)
Thus, the gradients of the 2 performance functions at a point that is Pareto optimal
relative to 2 tasks point in opposite directions.
12
Let’s try to give a geometrical intuition to the above statement. The gradients of the
performance functions at point 𝑣 point in opposite directions if and only if 𝑣 is a
tangency point between 2 contours of the performance function.
2
Each point 𝑣 is on some contour of 𝑃1 : 𝐶1 = {𝑣 ′ | ||𝑣 ′ − 𝑣1∗ ||1 = ||𝑣 − 𝑣1∗ ||1 2 }, and on a
2
contour of 𝑃2 : 𝐶2 = {𝑣 ′ | ||𝑣 ′ − 𝑣2∗ ||2 = ||𝑣 − 𝑣2∗ ||2 2 }. As mentioned in the main text, 𝐶1
and 𝐶2 are ellipses. Point 𝑣 is a common point to 𝐶1 and 𝐶2 . It can be an intersection
point, an internal tangency point (when the intersection of the interiors of both ellipses is
non-empty), or an external tangency point.
The gradients of the performance functions at point 𝑣 point in opposite directions ⇔ 𝑣 is
an external tangency point between the 2 contours.
If the gradients of the performance function at a point 𝑣 do not point in opposite
directions, it is either an internal tangency point or an intersection point between 𝐶1 and
2
2
𝐶2 . In both cases 𝐶1 ○ ∩ 𝐶2 ○ ≠ 𝜙, where 𝐶𝑖 ○ = {𝑣 ′ | ||𝑣 ′ − 𝑣𝑖∗ ||𝑖 < ||𝑣 − 𝑣𝑖∗ ||𝑖 } - all
points that outperform 𝑣 in the 𝑖-th task (see figure S1a). It means that there exists 𝑣 ′ ∊
𝐶1 ○ ∩ 𝐶2 ○ ⇒ 𝑃1 (𝑣 ′ ) > 𝑃1 (𝑣) and 𝑃2 (𝑣 ′ ) > 𝑃2 (𝑣), i.e., if the gradients at point 𝑣 don’t
point at opposite directions, we can find a point 𝑣 ′ at the neighborhood of 𝑣 that performs
both tasks better than it. That is why a point for which the gradients don’t point in
opposite directions is not Pareto optimal. In case of an external tangency point 𝑣, 𝐶1 ○ ∩
𝐶2 ○ = {𝑣}, in which case there are no points that outperform 𝑣 in both tasks (figure S1b).
13
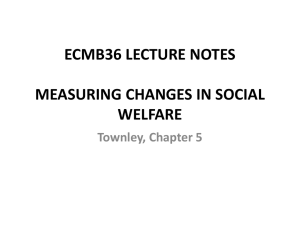
Figure S1: The Pareto front is composed of tangency points between performance functions’
contours. Archetypes are marked as red dots, Pareto front in blue. (a) A point whose
contours intersect is not Pareto optimal; points in the intersection area outperform it in both
tasks. (b) A point whose contours are tangent is optimal – there is no intersection area with
other outperforming points.
Denote the Pareto front by P.F., as seen in Appendix S1 (conclusion 3):
𝑃. 𝐹 = {(𝛼𝑀1 + (1 − 𝛼)𝑀2 )−1 (𝛼𝑀1 𝑣1∗ + (1 − 𝛼)𝑀2 𝑣2∗ ) | 0 ≤ 𝛼 ≤ 1}
⇒ ∀0 ≤ 𝛼 ≤ 1 ∃𝑣 ∈ 𝑃. 𝐹 ∶
𝑣 = (𝛼 𝑀1 + (1 − 𝛼)𝑀2 )−1 (𝛼 𝑀1 𝑣1∗ + (1 − 𝛼)𝑀2 𝑣2∗ ) =
−1
1 0
(𝑅(𝜃) (𝛼 𝐼 + (1 − 𝛼) (
)) 𝑅(−𝜃) )
0 𝜆2
1
0
((1 − 𝛼) 𝑅(𝜃) (
0
) 𝑅(−𝜃 ′ )(1,0)) =
𝜆2
(−1 + 𝛼)(−𝛼 + (−2 + 𝛼)𝜆2 + 𝛼(−1 + 𝜆2 )Cos[2𝜃]) (−1 + 𝛼)𝛼(−1 + 𝜆2 )Cos[𝜃]Sin[𝜃]
(−
,
)
−2𝛼 + 2(−1 + 𝛼)𝜆2
𝛼 + 𝜆2 − 𝛼𝜆2
When 𝛼 → 0, 𝑣 → (1, 0). When 𝛼 → 1, 𝑣 → (0,0). Thus, the Pareto front lies on a curve
between the archetypes 𝑣1∗ ′ and 𝑣2∗ ′ .
We next characterize this curve. Denote 𝑣 = (𝑥, 𝑦). By eliminating 𝛼, we get that our
curve is a quadratic curve that satisfies:
14
𝑥 2 (1 − 𝜆2 )𝑆𝑖𝑛2 (2 𝜃) − 2𝑥𝑦(1 − 𝜆2 )𝑆𝑖𝑛(2 𝜃)𝐶𝑜𝑠(2 𝜃) − 𝑦 2 (1 − 𝜆2 )𝑆𝑖𝑛2 (2 𝜃)
− 𝑥 (1 − 𝜆2 )𝑆𝑖𝑛2 (2 𝜃) + 𝑦 ((1 + 𝜆2 − (1 − 𝜆2 )𝐶𝑜𝑠(2 𝜃)) 𝑆𝑖𝑛(2 𝜃) = 0
A general quadratic curve is of the form 𝐴𝑥𝑥 𝑥 2 + 2𝐴𝑥𝑦 𝑥𝑦 + 𝐴𝑦𝑦 𝑦 2 + 2𝐴𝑥 𝑥 + 2𝐴𝑦 𝑦 +
𝐴=0
If J = 𝐴𝑥𝑥 𝐴𝑦𝑦 -
𝐴2𝑥𝑦
𝐴𝑥𝑥
< 0 and Δ = 𝐷𝑒𝑡 ( 𝐴𝑥𝑦
𝐴𝑥
𝐴𝑥𝑦
𝐴𝑦𝑦
𝐴𝑦
𝐴𝑥
𝐴𝑦 ) ≠ 0 then the equation
𝐴
represents a hyperbola.
For our curve:
J = 𝐴𝑥𝑥 𝐴𝑦𝑦 , 𝐴2𝑥𝑦 = −(−1 + λ2 )2 sin2 (2𝜃) , Δ = 4𝜆2 (−1 + 𝜆2 ) sin([2𝜃]4 )
J < 0 and Δ ≠ 0 unless 𝜆 = 1 𝑜𝑟 𝜃 = 0 𝑜𝑟
𝜋
2
and then J = 0 and Δ = 0. This means that
the Pareto optimal points lie on a section of a hyperbola between the 2 archetypes, unless
𝜋
𝜆 = 1 𝑜𝑟 𝜃 ∈ {0, 2 } and then they lie on the line between the archetypes. This matches
previous results [1] since if 𝜆 = 1 both norms are equal. This also shows that if both
𝜋
norms’ contours are perpendicular to the line between them (𝜃𝑖 ∈ {0, 2 }), the Pareto front
is the line between the archetypes.
To conclude, we showed that the Pareto front associated with 2 archetypes in a 2-D trait
space with performance functions that decrease monotonically with a general innerproduct norm distance from the archetype is a section of a hyperbola (or a line) between
the archetypes.
15
Appendix S3
The Pareto front of 2 tasks in an n-dimensional morphospace has hyperbolic
projections
In this Appendix we will characterize the Pareto front for 2 tasks in an n-dimensional
morphospace.
We would like to prove that the Pareto front in an n-dimensional trait space for a system
that needs to perform 2 tasks, when each performance function depends on a different
inner-product norm, is a 1-dimensional curve connecting the archetypes whose
projections on the principle planes of a certain coordinate system are hyperbolae (or
lines).
As shown in Appendix S1, the performance functions 𝑃𝑖 can be written as
𝑃𝑖 (𝑣) = −(𝑣 − 𝑣𝑖∗ )𝑇 𝑀𝑖 (𝑣 − 𝑣𝑖∗ )
with positive-definite 𝑀𝑖 that can be decomposed as
𝜆2𝑖,1
𝑀𝑖 = 𝑅𝑖 ( 0
0
0
0
… 0 ) 𝑅𝑖𝑇
0 𝜆2𝑖,𝑁
where 𝑅𝑖 is an orthogonal matrix. The Pareto front is the locus of all points satisfying
𝛼1 𝑀1 (𝑣 − 𝑣1∗ ) + 𝛼2 𝑀2 (𝑣 − 𝑣2∗ ) = 0, 𝛼1 + 𝛼2 = 1
Moreover, there exists a basis in which 𝑀1 = 𝐼, simply redefine:
𝜆𝑖,1
𝑣 ∶= ( 0
0
0
0
… 0 ) 𝑅𝑛𝑇 𝑣
0 𝜆𝑖,𝑛
In which 𝑀2 (describing 𝑃2 ) is still positive-definite (as it does not depend on the basis).
Denote 𝐴𝑖 = 𝛼𝑖 𝑀𝑖 , 𝐴 = 𝐴1 + 𝐴2 , 𝐵𝑖 = 𝐴−1 𝐴𝑖
16
𝐵1 + 𝐵2 = 𝐴−1 (𝐴1 + 𝐴2 ) = 𝐴−1 𝐴 = 𝐼
𝑣 = 𝐴−1 (𝐴1 𝑣1∗ + 𝐴2 v2∗ ) = 𝐵1 𝑣1∗ + 𝐵2 𝑣2∗
The eigenvalues of 𝑀𝑖 are positive. The eigenvalues of 𝐴𝑖 are non-negative as 𝛼𝑖 ≥ 0. As
𝛼𝑖 are real, 𝐴𝑖 are symmetric. 𝐴1 has a single eigenvalue - 𝛼1 , since 𝑀1 is assumed to be
the identity matrix. The eigenvalues of 𝐴2 are 𝛼2 𝜆𝑗2 . As 𝐴1 is scalar, the eigenvectors
of 𝐴 = 𝐴1 + 𝐴2 are the same as those of 𝐴2 , with eigenvalues 𝛼1 + 𝛼2 𝜆𝑗2 . These
eigenvalues are positive since at least one 𝛼𝑖 is positive, therefore A is invertible. The
eigenvalues of 𝐴−1 are 𝛼
1
1
+ 𝛼2 𝜆2𝑗
. 𝐴 is symmetric as a sum of 2 symmetric matrices.
As 𝐴1 is scalar, it commutes with 𝐴2 . [𝐴1 , 𝐴2 ] = 𝐴1 𝐴2 − 𝐴2 𝐴1 = 0 ⇒ [𝐴, 𝐴1 ] = 0 and
[𝐴, 𝐴2 ] = 0 ⇒ [𝐴−1 , 𝐴1 ] = 0
𝐴𝑖 𝐴𝑇
−1
𝑇
[𝐴−1 , 𝐴2 ] = 0 ⇒ 𝐵𝑖𝑇 = (𝐴−1 𝐴𝑖 )𝑇 = 𝐴𝑇𝑖 𝐴−1 =
and
= 𝐴𝑖 𝐴−1 = 𝐵𝑖 .
Also, 𝐴−1 has the same eigenvectors as 𝐴, 𝐴1 and 𝐴2 so the eigenvalues of 𝐵1 are
𝛼1
𝛼1 +𝛼2 𝜆2𝑗
=
𝛼
𝛼+(1−𝛼) 𝜆2𝑗
and of 𝐵2 are
1−𝛼
𝛼
1−𝛼+ 2
𝜆
𝑗
𝐵1 and 𝐵2 are mutually diagonalizable: Let D be such that 𝐷𝐵1 𝐷−1 = Λ1 . Now 𝐵2 = 𝐼 −
𝐵1 ⇒ 𝐷𝐵2 𝐷−1 = 𝐷(𝐼 − 𝐵1 )𝐷−1 = 𝐼 − Λ1
𝑣 = 𝐷−1 Λ1 𝐷 𝑣1∗ + 𝐷−1 (𝐼 − Λ1 )𝐷 𝑣2∗
= 𝑣2∗ + 𝐷−1 Λ1 𝐷 (𝑣1∗ − 𝑣2∗ ) → 𝐷(𝑣 − 𝑣2∗ ) =
Λ1 𝐷(𝑣1∗ − 𝑣2∗ )
Consider the rotated coordinate system, 𝑣 ≔ 𝐷−1 𝑣, and rename 𝑣2∗ ∶= 𝐷−1 𝑣2∗ . In this
𝛼
system 𝑣 −
𝑣2∗
= Λ1 (𝑣 −
𝑣1∗ )
𝛼+(1−𝛼) 𝜆21
=(
⋮
0
…
0
⋱
…
⋮
𝛼
) (𝑣 − 𝑣1∗ ).
𝛼+(1−𝛼) 𝜆2𝑛
∗
∗
∗
∗
Denote 𝑣 = (𝑣1 , … , 𝑣𝑛 ), 𝑣1∗ = (𝑣1,1
, … , 𝑣1,𝑛
), 𝑣2∗ = (𝑣2,1
, … , 𝑣2,𝑛
)
For every 2 coordinates 𝑗, 𝑘 we get that:
17
𝑣𝑘 𝑣𝑗 (𝜆𝑗 − 𝜆𝑘 ) + 𝑣𝑘 (𝑣1,𝑗 𝜆𝑘 − 𝑣2,𝑗 𝜆𝑗 ) + 𝑣𝑗 (𝑣2,𝑘 𝜆𝑘 − 𝑣1,𝑘 𝜆𝑗 ) + 𝑣1,𝑘 𝑣2,𝑗 𝜆𝑗 − 𝑣1,𝑗 𝑣2,𝑘 𝜆𝑘
=0
Thus, the projection of the Pareto front on any main plane is a quadratic curve, with
parameters:
2
J = 𝐴𝑥𝑥 𝐴𝑦𝑦 − 𝐴2𝑥𝑦 = −(𝜆𝑗 − 𝜆𝑘 ) , Δ = −(𝜆𝑗 − 𝜆𝑘 )
2
For components for which 𝜆𝑗 ≠ 𝜆𝑘 , 𝐽 < 0 and Δ ≠ 0, so the projection on their plane is a
hyperbola. For components for which 𝜆𝑗 = 𝜆𝑘 , 𝐽 = 0 and Δ = 0, so the projection on
their plane is a line.
To conclude, we get that the Pareto front associated with 2 archetypes in an ndimensional trait space is a 1-dimensional curve between the 2 archetypes. There exists a
coordinate system such that the projection of this curve on each principal plane is a
section of a hyperbola or a line between the projections of the archetypes.
18
Appendix S4
Calculation of the deviation of the Pareto front from a straight line for 2 tasks in a
2D-morphospace
In this Appendix, we calculate the maximal deviation of the Pareto front associated with
2 tasks in a 2D morphospace from the line between the archetypes (which is the Pareto
front in case the norms are equal).
The deviation of the front from the line between the archetypes is defined as the maximal
height ℎ of a point on the front with respect to the line, divided by the Euclidean distance
between the archetypes, D.
1
1
We can assume without loss of generality that the archetypes are at (− 2 , 0) and (2 , 0),
since this assumption can be satisfied by a combination of translations/rotations and
isometric scaling, all of which preserve distance ratios. Notice that in this case 𝐷 = 1 so
ℎ
the ratio 𝐷 is simply ℎ.
Norm 𝑖 depends on the parameters 𝜆𝑖 , 𝜃𝑖 , i.e - 𝑀𝑖 = R(θi ) (
1 0
) 𝑅(−θi ). During the
0 𝜆2𝑖
𝜋
solution we assume that 0 ≤ 𝜃𝑖 < 2 . This is possible since the Pareto front is symmetric
𝜋 1
under the transformation: 𝜃𝑖 , 𝜆𝑖 → 𝜃𝑖 + 2 , 𝜆 (see Appendix S5)
𝑖
Appendix S1 (Conclusion 3) gives a parametric representation of the front, {𝑥(𝑢), 𝑦(𝑢)},
with a parameter 0 ≤ 𝑢 ≤ 1. As the line between the archetypes lies on the 𝑥 axis, the
maximal deviation is given by max |𝑦(𝑢) |. max |𝑦(𝑢) | = |𝑦(𝑢𝑚𝑎𝑥 )|, for 𝑢𝑚𝑎𝑥 with
𝜕𝑢 𝑦|𝑢𝑚𝑎𝑥 = 0 (The maximum is not obtained at the edges, since 𝑦(0) = 𝑦(1) = 0).
So, from Appendix S1:
𝑦(𝑢) = −
1
(−1 + 𝑢)𝑢 (−(−1 + 𝜆21 )Sin[2θ1 ](Cos[θ2 ]2 + 𝜆22 Sin[θ2 ]2 ) − (−1 + 𝜆22 )(−1 − 𝜆21 + (−1 + 𝜆21 )Cos[2θ1 ])Sin[2θ2 ])
2
2𝜆22 + 𝑢(1 + 𝜆21 + (−3 + 𝜆21 )𝜆22 + 𝑢(−1 + 𝜆21 + 𝜆22 − 𝜆21 𝜆22 )) + (−1 + 𝑢)𝑢(−1 + 𝜆21 )(−1 + 𝜆22 )Cos[2(θ1 − θ2 )]
Straightforward calculation shows that 𝜕𝑢 𝑦 = 0 for 𝑢𝑚𝑎𝑥 =
1
λ
1+ 1
λ2
19
Substituting this into the expression for 𝑦, we get that the maximal deviation for given
parameters 𝜆1 , 𝜃1 and 𝜆2 , 𝜃2 is:
ℎ(𝜆1 , 𝜃1 𝜆2 , 𝜃2 ) = |−
(−1+𝜆21 )(1+𝜆22 )Sin[2θ1 ]−(−1+𝜆22 )((−1+𝜆21 )Sin[2(θ1 −θ2 )]+(1+𝜆21 )Sin[2θ2 ])
2(1+𝜆21 +4λ1 λ2 +𝜆22 +𝜆21 𝜆22 −(−1+𝜆21 )(−1+𝜆22 )Cos[2(θ1 −θ2 )])
|
It is bounded by:
|−
≤
=
(−1 + 𝜆21 )(1 + 𝜆22 )Sin[2θ1 ] − (−1 + 𝜆22 )((−1 + 𝜆21 )Sin[2(θ1 − θ2 )] + (1 + 𝜆21 )Sin[2θ2 ])
|
2(1 + 𝜆21 + 4λ1 λ2 + 𝜆22 + 𝜆21 𝜆22 − (−1 + 𝜆21 )(−1 + 𝜆22 )Cos[2(θ1 − θ2 )])
|(−1 + 𝜆21 )(1 + 𝜆22 )Sin[2θ1 ]| + |(−1 + 𝜆22 )(−1 + 𝜆21 )Sin[2(θ1 − θ2 )]| + |(1 + 𝜆21 )(−1 + 𝜆22 )Sin[2θ2 ]|
2||1 + 𝜆21 + 4λ1 λ2 + 𝜆22 + 𝜆21 𝜆22 | − |(−1 + 𝜆21 )(−1 + 𝜆22 )Cos[2(θ1 − θ2 )]||
|(−1 + 𝜆21 )(1 + 𝜆22 )Sin[2θ1 ]| + |(−1 + 𝜆22 )(−1 + 𝜆21 )Sin[2(θ1 − θ2 )]| + |(1 + 𝜆21 )(−1 + 𝜆22 )Sin[2θ2 ]|
2(1 + 𝜆21 + 4λ1 λ2 + 𝜆22 + 𝜆21 𝜆22 − (1 − 𝜆21 )(1 − 𝜆22 )|Cos[2(θ1 − θ2 )]|)
≤
(1 − 𝜆21 )(1 + 𝜆22 ) + (1 − 𝜆22 )(1 − 𝜆21 ) + (1 + 𝜆21 )(1 − 𝜆22 )
2(1 + 𝜆21 + 4λ1 λ2 + 𝜆22 + 𝜆21 𝜆22 − (1 − 𝜆21 )(1 − 𝜆22 ))
= −
−3 + 𝜆21 + 𝜆22 + 𝜆21 𝜆22
4(λ1 + λ2 )2
So, the maximal deviation from the line between the archetypes, for any given 𝜃1 , 𝜃2 is
bounded by
3−𝜆21 −𝜆22 −𝜆21 𝜆22
.
4(λ1 +λ2 )2
Let’s focus on the special case when one of the performance functions depends on
Euclidean norm, i.e. – λ1 = 1.
In this case the upper bound becomes ℎ ≤
1−𝜆2
ℎ(1, 𝜃1 , 𝜆2 , 𝜃2 ) =
When setting 𝜃2 =
𝜋
4
, and this is a tight bound:
2(1+𝜆2 )
(1 − 𝜆2 )𝑆𝑖𝑛[2𝜃2 ]
2(1 + 𝜆2 )
this bound is obtained (as expected, 𝜃1 is irrelevant when 𝜆1 = 1).
Hence, when task 1 depends on Euclidean norm, the maximal deviation of the front per
given 𝜆2 is obtained for 𝜃2 =
𝜋
4
and is given by:
ℎ(1, 𝜃1 , 𝜆2 , 𝜃2 ) ≤
20
(1 − 𝜆2 )
2(1 + 𝜆2 )
In this case, the deviation of the Pareto front from the line between the archetypes,
maximized on all 𝜆2 ′𝑠, and on all 𝜃2 ′ 𝑠 is half the distance between the archetypes. The
deviation approaches this value as 𝜆2 → 0 (the contours of the second norm becomes
more and more eccentric).
21
Appendix S5
Each Pareto front of 2 tasks in a 2D morphospace is generated by a 1-dimensional
family of norm-pairs
Here, we would like to deal with the following question: Let PF be a Pareto front
associated with 2 tasks in a 2D-morphospace, where each performance decays from its
archetype with a different inner-product norm. In Appendix S2 we showed that under the
above assumptions, the Pareto front is a segment of a hyperbola (or a line) that connects
the archetypes 𝑣1∗ and 𝑣2∗ . In that case, can we deduce the norms that the performance
functions decay with from the exact shape of the Pareto front?
When approaching the question presented above, we assume that the position of the
archetypes is known. This is a reasonable assumption – for a given hyperbola/line-shaped
data set, the 2 edge points of the front are assumed to be the archetypes.
We will show that not all hyperbola-shaped datasets can be explained by the model with
its current assumptions – there are hyperbolae that are not generated by any pair of
norms. However, if for a hyperbola-shaped dataset there exists a pair of norms that
generates it, then there exists a one-dimensional family of norm-pairs that generate it.
This is expected. A hyperbola is a quadratic curve defined by an equation of the form:
𝐴𝑥𝑥 𝑥 2 + 2𝐴𝑥𝑦 𝑥𝑦 + 𝐴𝑦𝑦 𝑦 2 + 2𝐴𝑥 𝑥 + 2𝐴𝑦 𝑦 + 𝐴 = 0. Hence, it is defined by 5 free
parameters (we can normalize the equation by one of the coefficients). We assume that
the position of the archetypes is known. A hyperbola-shaped front must pass through the
2 archetypes, leaving it with 3 free parameters (each point yields a single equation the
hyperbola’s coefficients must satisfy, reducing the number of free parameters by one).
The norms that the performance functions depend on are represented by the matrices
𝑀1 , 𝑀2 , where 𝑀𝑖 = 𝑅(𝜃𝑖 ) (
1 0
) 𝑅(−𝜃𝑖 ) (Appendix S2). Hence, besides the position
0 𝜆2𝑖
of the archetype 𝑣𝑖∗ , each norm can be describes by 2 parameters - the ratio between the
eigenvalues of the norm’s matrix, 𝜆2𝑖 , and the angle of the rotation matrix that
22
1
diagonalizes it, 𝜃𝑖 (𝑃𝑖 = −(𝑣 − 𝑣𝑖∗ )𝑇 𝑅(𝜃𝑖 ) (
0
0
) 𝑅(−𝜃𝑖 )(𝑣 − 𝑣𝑖∗ )). It means that if the
𝜆2𝑖
location of the archetypes is known, the 2 performance functions together have 4 free
parameters. Thus, the problem of deducing the norms from the shape of the Pareto front
is expectedly degenerate, since we try to determine 4 free parameters (the norms of the
performance functions) using only 3 observed parameters (the hyperbola). Also, we
expect the family of norm-pairs that generate each hyperbola to depend only on 1
parameter – i.e. - to be 1-dimensional.
Consider a hyperbola/line-shaped dataset that is generated by a pair of norms 𝑀1 and 𝑀2 ,
with archetypes 𝑣1∗ , 𝑣2∗ . We can transform to a coordinate system where 𝑣1∗ = (0,0) and
𝑣2∗ = (1,0), 𝑀1 = 𝐼 and 𝑀2 is a positive definite matrix, using a transformation under
which a hyperbola/line remains a hyperbola/line. Such transformation was shown to exist
in Appendix S2. There is a 1-to-1 correspondence between norm-pairs that generate the
transformed front in the transformed coordinate system and the norm-pairs that generate
the front in the original coordinate system. Hence, if we show that there is a 1dimensional family of norm pairs that generate the front in the transformed system, the
conclusion will also hold in the original system.
Assume that in the transformed coordinate system, the quadratic curve that the Pareto
front lies on is represented by:
𝐴𝑥𝑥 𝑥 2 + 2𝐴𝑥𝑦 𝑥𝑦 + 𝐴𝑦𝑦 𝑦 2 + 2𝐴𝑥 𝑥 + 2𝐴𝑦 𝑦 + 𝐴 = 0
We constrain the curve to go through the archetypes at (0,0) and (1,0), and get that 𝐴 =
0 and 𝐴𝑥𝑥 = − 2𝐴𝑥
So we expect the Pareto front to be of the form
(𝑃𝐹) 𝐴𝑥𝑥 𝑥 2 + 2𝐴𝑥𝑦 𝑥𝑦 + 𝐴𝑦𝑦 𝑦 2 − 𝐴𝑥𝑥 𝑥 + 2𝐴𝑦 𝑦 = 0
Each quadratic curve is associated with 2 parameters, Δ and 𝐽, defined by:
J = 𝐴𝑥𝑥 𝐴𝑦𝑦 -
𝐴2𝑥𝑦
𝐴𝑥𝑥
and Δ = det ( 𝐴𝑥𝑦
𝐴𝑥
𝐴𝑥𝑦
𝐴𝑦𝑦
𝐴𝑦
23
𝐴𝑥
𝐴2 𝐴
𝐴𝑦 ) = − 𝑥𝑥 𝑦𝑦 − 𝐴𝑥𝑥 𝐴𝑥𝑦 𝐴𝑦 − 𝐴𝑥𝑥 A2y
4
𝐴
For a hyperbola 𝐽 < 0 and Δ ≠ 0. For a line, 𝐽 = 0 and Δ = 0.
We would like to find all norm-pairs (𝑚1 , 𝑚2 ) that generate (𝑃𝐹), given that the pair
(𝐼, 𝑀2 ) generates it.
Let 𝑚1 depend on parameters 𝜆1 , 𝜃1 and 𝑚2 depend on parameters 𝜆2 , 𝜃2 . Namely 1
𝑚1 = 𝑅(𝜃1 ) (
0
0
1
) 𝑅(−𝜃1 ) ; 𝑚2 = 𝑅(𝜃2 ) (
𝜆12
0
0
) 𝑅(−𝜃2 )
𝜆22
As will be shown in Appendix S7 (Lemma 1), the quadratic curve on which lies a Pareto
front associated with 2 tasks can be given by the equation: 𝜋𝑧 (𝑔1 (𝑣) × 𝑔2 (𝑣)) ≡ 0,
where
𝑔𝑖 (𝑣) = ∇𝑃𝑖 (𝑣) = 𝑚𝑖 (𝑣 − 𝑣𝑖∗ ).
Denote
𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 ) = 𝜋𝑧 (𝑔1 (𝑣) ×
𝑔2 (𝑣)) ⇒
𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 )
= 𝑦 (1 + λ12 + λ22 + λ12 λ22 + (−1 + λ12 )(1 + λ22 )Cos[2θ1 ]
− (−1 + λ12 )(−1 + λ22 )Cos[2(θ1 − θ2 )] − (1 + λ12 )(−1 + λ22 )Cos[2θ2 ])
+ 2𝑥𝑦(−(−1 + λ12 )(1 + λ22 )Cos[2θ1 ] + (1 + λ12 )(−1 + λ22 )Cos[2θ2 ])
+ 𝑥((−1 + λ12 )(1 + λ22 )Sin[2θ1 ] − (−1 + λ1)(−1 + λ22 )Sin[2(θ1 − θ2 )]
− (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
+ 𝑦 2 ((−1 + λ12 )(1 + λ22 )Sin[2θ1 ]
+ (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] − (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
+ 𝑥 2 (−(−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1
− θ2 )] + (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
The Pareto front associated with 𝑚1 , 𝑚2 is thus given by 𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 ) = 0.
1
𝜋
Here we observe the invariance of the Pareto front under 𝜆𝑖 → 𝜆 , 𝜃𝑖 → 𝜃𝑖 + 2, which is
𝑖
inherent to the problem since the norms are symmetric under this transformation. This is
only a “technical” degeneracy rather than a genuine one, since 𝑑𝑖 (𝜆𝑖 , 𝜃𝑖 ) is essentially the
1
𝜋
same as 𝑑𝑖 (𝜆 , 𝜃𝑖 + 2 ). The resulting norms only differ by a factor of 𝜆, and generate the
𝑖
24
same contours and the same Pareto front (see Appendix S2). Hence, we can assume 0 ≤
𝜋
𝜃 < 2.
We would like to know when 𝑃𝐹 = 0 and 𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 ) = 0 represent the same
line/hyperbola. This happens if and only if these quadratic forms are equal up to a factor,
i.e. - 𝑃𝐹 = 𝛽 𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 ).
We know that 𝑃𝐹 and 𝑃𝐹(𝜆1 = 1, 𝜆, 𝜃1 = 0, 𝜃) represent the same quadratic curve.
Hence,
∃𝛽 𝑠. 𝑡. 𝑃𝐹 = 𝛽 𝑃𝐹(𝜆1 = 1, 𝜆, 𝜃1 = 0, 𝜃).
Examining
the
expression
for
𝑃𝐹(𝜆1 = 1, 𝜆, 𝜃1 = 0, 𝜃), we find out that the coefficients of 𝑥 2 and of 𝑦 2 are opposite to
one another. That is – if the hyperbola was indeed generated by the given norm-pair, it
mush have 𝐴𝑥𝑥 = −𝐴𝑦𝑦 .
First, let’s find which norm pairs generate 𝑃𝐹 given that it is a line. If the front is a line,
then both 𝐽 = 0 and Δ = 0. As 𝐴𝑥𝑥 = −𝐴𝑦𝑦 and 𝐽 = −𝐴2𝑦𝑦 − 𝐴2𝑥𝑦 we get that 𝐴𝑦𝑦 =
0 and 𝐴𝑥𝑦 = 0
We look for all other 𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 , for which exists 𝛽 such that 𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 ) = 𝛽𝑃𝐹.
We know that when this happens, the coefficients of 𝑥 2 and of 𝑦 2 are opposite to one
another. This results in the equation:
(𝐴) − 2(−1 + λ1 )(−1 + λ2 )Sin[2(θ1 − θ2 )] = 0
𝜋
This equation is satisfied if λ1 = 1, λ2 = 1 or 𝜃1 = 𝜃2 as all angles are taken modulo 2 .
Also, we know that the coefficients of 𝑥 2 , 𝑦 2 and 𝑥𝑦 are zero. This results in the
following equation:
(𝐵)((−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )]
− (1 + λ12 )(−1 + λ22 )Sin[2θ2 ]) = 0
Substituting into (𝐵) each of the solutions found for equation (𝐴), we get that:
25
If 𝜆1 = 1, equation (B) becomes: −2(−1 + λ2 )Sin[2θ2 ] = 0. It is satisfied if λ2 = 1 or
𝜋
θ2 = 0 (as all angles are taken modulo 2 ).
If 𝜆2 = 1, equation (B) becomes: 2(1 − λ1 )Sin[2θ1 ] = 0. It is satisfied if λ1 = 1 or θ1 =
0.
If 𝜃1 = 𝜃2 , equation (B) becomes: 2(𝜆1 − λ2 )Sin[2θ2 ] = 0. It is satisfied if θ2 = 0, or
𝜆1 − λ2 = 0
To conclude, equations (𝐴) and (𝐵), which must be satisfied in order that
𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 ) will represents the same line as 𝑃𝐹, are satisfied if and only if:
(I)
𝜆1 = 𝜆2 and 𝜃1 = 𝜃2
𝑜𝑟
(II)
𝜃1 = 𝜃2 = 0
Note that if 𝜆𝑖 = 1, 𝜃𝑖 has no effect on the norm and we can take it to be whatever fits.
On the other hand, it can be easily checked that if one of those conditions holds,
𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 ) represents a line (or intersecting lines) that the line between the
archetypes lies on.
It means that 2 norms generate the line between the archetypes if and only if one of the
above conditions holds. The meaning of (I) is that 𝑚1 = 𝑚2 , and (II) means that 𝑚1 ′𝑠
and 𝑚2 ′𝑠 elliptic contours each have an axis parallel to the 𝑥 axis (which is parallel to
𝑣1∗ − 𝑣2∗ )
Note that if a dataset is shaped like a line, 2 Euclidean norms will always generate it. This
means that in order for the above conclusions to hold, we only need to translate, rotate
and isometrically scale the coordinate system such that the archetypes are at (0,0) and
(1,0). This implies that the above conclusions also hold in the original coordinate system.
Equality of matrices is not affected by change of basis, which covers (I). Regarding case
(II) – notice that the contours’ axes transform like regular vectors when applying
translations / rotations, and parallel vectors remain parallel under any linear
transformation.
26
To summarize – for a given archetype pair (𝑣1∗ , 𝑣2∗ ), the norm-pair (𝑚1 , 𝑚2 ) generates a
Pareto front which is the line between them if and only if 𝑚1 = 𝑚2 or both 𝑚1 and 𝑚2
have elliptic contours with an axis that is parallel to 𝑣1∗ − 𝑣2∗ .
After taking care of which norms generate a line-shaped front, we will assume from now
on that the front is not a straight line but a hyperbola.
We saw that on the frame we work on, the Pareto front lies on a curve given by the
equation:
𝐴𝑥𝑥 𝑥 2 + 2𝐴𝑥𝑦 𝑥𝑦 − 𝐴𝑥𝑥 𝑦 2 − 𝐴𝑥𝑥 𝑥 + 2𝐴𝑦 𝑦 = 0
We know that 𝐴𝑥𝑥 ≠ 0, since otherwise 𝛥 = 0 and the resulting Pareto front is not a
hyperbola, so we can normalize the coefficient of 𝑥 2 to be 1, and equate both
(normalized) representations:
𝑥 2 − 𝑥 + 2𝐴𝑥𝑦 𝑥𝑦 − 𝑦 2 + 2𝐴𝑦 𝑦 = 0
And
𝑥2 − 𝑥
+ 𝑦
(1 + λ12 + λ22 + λ12 λ22 + (−1 + λ12 )(1 + λ22 )Cos[2θ1 ] − (−1 + λ12 )(−1 + λ22 )Cos[2(θ1 − θ2 )] − (1 + λ12 )(−1 + λ22 )Cos[2θ2 ])
(−(−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] + (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
+ 2𝑥𝑦
+ 𝑦2
(−(−1 +
λ12 )(1
(−(−1 + λ12 )(1 + λ22 )Cos[2θ1 ] + (1 + λ12 )(−1 + λ22 )Cos[2θ2 ])
+ λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] + (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
((−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] − (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
(−(−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] + (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
=0
These normalized representations describe the same hyperbola if and only if the
coefficients are equal. This results in 3 equations (equation set E1):
(−1+λ21 )(1+λ22 )Sin[2θ1 ]+(−1+λ21 )(−1+λ22 )Sin[2(θ1 −θ2 )]−(1+λ21 )(−1+λ22 )Sin[2θ2 ]
(I)
−1 +
(II)
−2𝐴𝑦 +
(III)
−𝐴𝑥𝑦 +
(1−λ21 )(1+λ22 )Sin[2θ1 ]+(−1+λ21 )(−1+λ22 )Sin[2(θ1 −θ2 )]+(1+λ21 )(−1+λ22 )Sin[2θ2 ]
=0
(1+λ21 )(1+λ22 )+(−1+λ21 )(1+λ22 )Cos[2θ1 ]−(−1+λ21 )(−1+λ22 )Cos[2(θ1 −θ2)]−(1+λ21 )(−1+λ22 )Cos[2θ2 ]
(1−λ21 )(1+λ22 )Sin[2θ1 ]+(−1+λ22 )((−1+λ21 )Sin[2(θ1 −θ2 )]+(1+λ21 )Sin[2θ2 ])
(1−λ21 )(1+λ22 )Cos[2θ1 ]+(1+λ21 )(−1+λ22 )Cos[2θ2 ]
2
2
(1−λ1 )(1+λ2 )Sin[2θ1 ]+(−1+λ22 )((−1+λ21 )Sin[2(θ1 −θ2 )]+(1+λ21 )Sin[2θ2 ])
Consider equation (I):
27
=0
=0
2(−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )]
=0
−(−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ22 )((−1 + λ12 )Sin[2(θ1 − θ2 )] + (1 + λ12 )Sin[2θ2 ])
It is satisfied when λ12 = 1 or λ22 = 1 or θ1 = θ2 . Substituting either 𝜆𝑖 = 1 into equations
(I) and (III) yields equations that don’t depend on 𝜃𝑖 (this is expected since in case 𝜆𝑖 = 1
the respective norm is Euclidean and 𝜃𝑖 is meaningless). So it is safe to assume that in
this case it is true, in a sense, that 𝜃1 = 𝜃2 . From now on we’ll simply use 𝜃 to denote
the common angle. Equations (I) and (II) now become (regardless of which condition
satisfied equation (I)):
−2𝐴𝑥𝑦 + 2 cot[2𝜃] = 0
2𝐴𝑦 (λ12 − λ22 ) + λ12 cot[𝜃] + λ22 tan[𝜃]
=0
−λ12 + λ22
This means that 𝜃 ≔ θ1 = θ2 =
arccot[𝐴𝑥𝑦 ]
2
For the second equation we see that it reduces to
2𝐴𝑦 (1 −
λ22
λ22
)
+
cot[𝜃]
+
tan[𝜃] = 0
λ12
λ12
2
λ
2
λ
It means that from this equation we can only deduce (λ2 ) . Denote 𝐶 = (λ2 ) . C depends
1
1
on the parameters of the hyperbola:
arccot[𝐴𝑥𝑦 ]
]
2
𝐶=
arccot[𝐴𝑥𝑦 ]
−2𝐴𝑦 + tan[
]
2
−2𝐴𝑦 − cot[
Note that for consistency, the value deduced for C from equation (II) must be positive. If
𝐶 ≤ 0, it means that there is no pair of norms that generate this hyperbola. We know that
the Pareto front is generated by 𝑚1 = 𝐼, 𝑚2 = 𝑀2 , so their parameters must satisfy
28
equation
(II).
arccot[𝐴𝑥𝑦 ]
𝜆 tan[
2
arccot[𝐴𝑥𝑦 ]
𝜆1 = 1, 𝜆2 = 𝜆, 𝜃1 = 0, 𝜃2 = 𝜃 ⇒ 2𝐴𝑦 (1 − 𝜆) + cot[
2
]+
]=0
arccot[𝐴𝑥𝑦 ]
]
2
⇒ 𝜆2 =
=𝐶
arccot[𝐴𝑥𝑦 ]
−2𝐴𝑦 + tan[
]
2
−2𝐴𝑦 − cot[
𝜆2 > 0 , therefore 𝐶 > 0. This means that for every choice of 𝜆1 > 0, choosing 𝜆22 =
𝐶 𝜆12 will result in 𝜆22 greater than zero, and hence 𝑚2 that depends on 𝜆2 will represent
an inner-product norm. Hence, the parameters 𝜃1 = 𝜃2 =
arccot[𝐴𝑥𝑦 ]
, 𝜆1 , 𝜆2 = √𝐶𝜆1
2
define 2 norms, 𝑚1 and 𝑚2 that generate (PF), for every 𝜆1 > 0. This means that there is
a 1-dimensional family of norm-pairs that generate PF, parameterized by 𝜆1 . Note that
choosing 𝑚1 determines 𝑚2 uniquely.
However, note that there exist hyperbola-shaped data sets that cannot be describes as a
Pareto front associated with 2 tasks. This is since the existence of any solution relies on C
being positive. C is defined by the parameters of the hyperbola (𝐶 =
arccot[𝐴𝑥𝑦 ]
]
2
arccot[𝐴𝑥𝑦 ]
−2𝐴𝑦 +tan[
]
2
−2𝐴𝑦 −cot[
).
We can find a hyperbola with parameters that define a negative C, which means that it is
not the Pareto front of any norm pairs. This also means that given a hyperbola, it is easy
to check whether or not it is generated by a norm-pair by simply calculating 𝐶. An
example for a hyperbola with 𝐶 < 0 is 𝑥 2 − 2𝑥𝑦 − 𝑦 2 − 𝑥 + 2𝑦 = 0.
So, knowing at least one norm pair that generates the Pareto front, we can deduce all
norm pairs. However, another question can be asked: can we determine from the
parameters of the hyperbola whether there are norm pairs that generate the hyperbola, and
29
if so what are the norms? We will show that in the common case, it is numerically
possible.
To approach this question, assume we have data shaped like a hyperbola section. From
the data, we can identify the edge points of the hyperbola, and change coordinate system
such that the edge points are at (0,0) and (1,0). Those points are assumed to be the 2
archetypes - 𝑣1∗ = (0,0) and 𝑣2∗ = (1,0). The new coordinate system results from the old
coordinate system by a rotation, translation and isometric scaling. Note the difference
between this transformation and the one described earlier – in both of them we transform
the archetypes to be at (0,0) and (1,0). However, earlier we transformed such that one of
the norms that generates the front is Euclidean. Here we can’t do so as we don’t know
which norm pairs generate the hyperbola. As before, we get that under such
transformations, a hyperbola remains a hyperbola, and there is a 1-to-1 correspondence
between norm-pairs that generate the transformed front in the transformed coordinate
system and the norm-pairs that generate the front in the original coordinate system.
Hence, once we find which norms generate the front in the transformed coordinate
system, we can transform back and find the norms that generate the front in the original
coordinate system. If we find that there isn’t a norm pair that generates the hyperbola in
the transformed coordinate system, this conclusion will hold in the original coordinate
system.
In this coordinate system, the hyperbola is given by the equation
𝐴𝑥𝑥 𝑥 2 + 2𝐴𝑥𝑦 𝑥𝑦 + 𝐴𝑦𝑦 𝑦 2 − 𝐴𝑥𝑥 𝑥 + 2𝐴𝑦 𝑦 = 0
The 𝑥 coefficient and free parameter are determined since the hyperbola has to pass
through the archetypes at (0,0) and (0,1).
We would like to know which pairs of norms, if exist, generate a Pareto front with those
parameters. We search for parameters 𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 such that 𝑃𝐹(𝜆1 , 𝜆2 , 𝜃1 , 𝜃2 ), defined
before, describes the same curve as 𝐴𝑥𝑥 𝑥 2 + 2𝐴𝑥𝑦 𝑥𝑦 + 𝐴𝑦𝑦 𝑦 2 − 𝐴𝑥𝑥 𝑥 + 2𝐴𝑦 𝑦 = 0.
30
We know that 𝐴𝑥𝑥 ≠ 0, since otherwise 𝛥 = 0 and the Pareto front is a line, so we can
normalize the coefficient of 𝑥 2 to be 1, and equate both (normalized) representations:
𝑥 2 − 𝑥 + 2𝐴𝑥𝑦 𝑥𝑦 + 𝐴𝑦𝑦 𝑦 2 + 2𝐴𝑦 𝑦 = 0
and
𝑥2 − 𝑥
+ 𝑦
(1 + λ12 + λ22 + λ12 λ22 + (−1 + λ12 )(1 + λ22 )Cos[2θ1 ] − (−1 + λ12 )(−1 + λ22 )Cos[2(θ1 − θ2 )] − (1 + λ12 )(−1 + λ22 )Cos[2θ2 ])
(−(−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] + (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
+ 2𝑥𝑦
+ 𝑦2
(−(−1 +
λ12 )(1
(−(−1 + λ12 )(1 + λ22 )Cos[2θ1 ] + (1 + λ12 )(−1 + λ22 )Cos[2θ2 ])
+ λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] + (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
((−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] − (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
(−(−1 + λ12 )(1 + λ22 )Sin[2θ1 ] + (−1 + λ12 )(−1 + λ22 )Sin[2(θ1 − θ2 )] + (1 + λ12 )(−1 + λ22 )Sin[2θ2 ])
=0
These normalized representations describe the same hyperbola if and only if the
coefficients are equal. This results in 3 equations (equation set E2):
(I)
−𝐴𝑦𝑦 +
(II)
−2𝐴𝑦 +
(III)
−𝐴𝑥𝑦 +
(−1+λ21 )(1+λ22 )Sin[2θ1 ]+(−1+λ21 )(−1+λ22 )Sin[2(θ1 −θ2 )]−(1+λ21 )(−1+λ22 )Sin[2θ2 ]
(1−λ21 )(1+λ22 )Sin[2θ1 ]+(−1+λ21 )(−1+λ22 )Sin[2(θ1 −θ2 )]+(1+λ21 )(−1+λ22 )Sin[2θ2 ]
=0
(1+λ21 )(1+λ22 )+(−1+λ21 )(1+λ22 )Cos[2θ1 ]−(−1+λ21 )(−1+λ22 )Cos[2(θ1 −θ2)]−(1+λ21 )(−1+λ22 )Cos[2θ2 ]
(1−λ21 )(1+λ22 )Sin[2θ1 ]+(−1+λ22 )((−1+λ21 )Sin[2(θ1 −θ2 )]+(1+λ21 )Sin[2θ2 ])
(1−λ21 )(1+λ22 )Cos[2θ1 ]+(1+λ21 )(−1+λ22 )Cos[2θ2 ]
(1−λ21 )(1+λ22 )Sin[2θ1 ]+(−1+λ22 )((−1+λ21 )Sin[2(θ1 −θ2 )]+(1+λ21 )Sin[2θ2 ])
=0
=0
The solution of this equation set behaves quite differently depending on 𝐴𝑦𝑦 .
First assume that 𝐴𝑦𝑦 = −1. In that case, equation set E2 becomes equation set E1. Note
that as mentioned under equation set E1, this scenario happens if 𝜃1 = 𝜃2 , 𝜆1 = 1 or 𝜆2 =
1 (one of the norms is Euclidean). We know that the resulting solution is as calculated
above for E1, and that it is valid only if the hyperbola’s parameters are such that C > 0.
Here, given only the fit of the hyperbola, we can determine if there are norms that
generate the hyperbola, and what are the norms if they exist.
When 𝐴𝑦𝑦 ≠ −1, solving equations (E2.I)+(E2.III) results in:
λ12 = 1 +
2(1 + 𝐴𝑦𝑦 )
−1 − 𝐴𝑦𝑦 + (−1 + 𝐴𝑦𝑦 )Cos[2θ1 ] + 2𝐴𝑥𝑦 Sin[2θ1 ]
31
λ22 = 1 +
2(1 + 𝐴𝑦𝑦 )
−1 − 𝐴𝑦𝑦 + (−1 + 𝐴𝑦𝑦 )Cos[2θ2 ] + 2𝐴𝑥𝑦 Sin[2θ2 ]
Substituting this into equation (II) we get:
2
(IV) Sin[2θ1 ] (4(𝐴𝑥𝑦 + 𝐴𝑦 + 𝐴𝑦𝑦 𝐴𝑦 )Cos[2θ2 ] + (−4𝐴𝑥𝑦 2 + (1 + 𝐴𝑦𝑦 ) ) Sin[2θ2 ]) +
4 Cos[2θ1 ] (𝐴𝑦𝑦 Cos[2θ2 ] − (𝐴𝑥𝑦 𝐴𝑦𝑦 + 𝐴𝑦 + 𝐴𝑦𝑦 𝐴𝑦 )Sin[2θ2 ]) = 0
𝜋
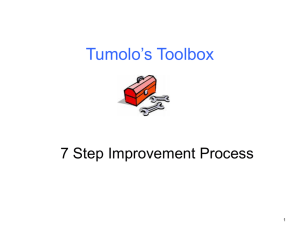
For every 𝜃2 , we will show that there exists a single angle 𝜃1 (modulo 2 ), such that
equation (IV) is satisfied. (An example for specific parameters 𝐴𝑦𝑦 , 𝐴𝑥𝑦 , 𝐴𝑦 is shown in
Fig.S2)
2
For convenience denote 𝜉 ≔ (1 + 𝐴𝑦𝑦 ) − 4𝐴𝑥𝑦 2 , 𝜂 = 4(𝐴𝑥𝑦 + 𝐴𝑦 + 𝐴𝑦𝑦 𝐴𝑦 )
There are 2 cases:
(A) 𝜃2 ≠
𝜋
4
𝜋
(𝑚𝑜𝑑 2 ):
Now Cos[2θ2 ] ≠ 0 and we can divide the equation by it:
(Sin[2θ1 ](𝜂 + 𝜉 Tan[2θ2 ]) + 4 Cos[2θ1 ] (𝐴𝑦𝑦 Cos[2θ2 ] − (𝐴𝑥𝑦 𝐴𝑦𝑦 + 𝐴𝑦 + 𝐴𝑦𝑦 𝐴𝑦 )Sin[2θ2 ])) = 0
Again, there are 2 cases:
𝜂
(A.1) Tan[2θ2 ] = − 𝜉
Substituting this into equation (IV) we get the equation:
2
8(1 + 𝐴𝑦𝑦 ) (𝐴𝑦𝑦 + 4𝐴𝑦 (𝐴𝑥𝑦 + 𝐴𝑦 ))
(
) Cos[2θ1 ] = 0
𝜉
2
(1 + 𝐴𝑦𝑦 ) (𝐴𝑦𝑦 + 4𝐴𝑦 (𝐴𝑥𝑦 + 𝐴𝑦 )) ≠ 0. This is because we assume that 𝐴𝑦𝑦 ≠ −1,
and, in addition, the Δ property of the quadratic curve is 𝛥 = 4(𝐴𝑦𝑦 + 4𝐴𝑦 (𝐴𝑥𝑦 + 𝐴𝑦 ))
and for a hyperbola 𝛥 ≠ 0. Hence, cos[2θ1 ] must equal 0 for the equation to be satisfied,
𝜋
𝜋
meaning 𝜃1 = 4 (𝑚𝑜𝑑 2 ).
32
𝜂
(A.2) Tan[2θ2 ] ≠ − 𝜉 :
𝜋
𝜋
In that case, we can assume that 𝜃1 ≠ 4 . This is because when 𝜃1 = 4 , Cos[2θ1 ] = 0,
Sin[2θ1 ] = 1, and 𝜃1 =
𝜋
4
solves the equation only if 𝜂 + 𝜉 Tan[2θ2 ] = 0. Note that
either 𝜉 ≠ 0 or 𝜂 ≠ 0, since if both 𝜉 = 0 and 𝜂 = 0, it can be shown that the Δ property
of the quadratic curve becomes 0. This means that this equation has a solution only if
𝜂
Tan[2θ2 ] = − 𝜉 , which is assumed not to be case.
𝜋
So we assume 𝜃1 ≠ 4 . In that case, Cos[2𝜃1 ] ≠ 0 and we can divide the equation by it.
The equation becomes:
8(𝐴𝑦𝑦 − (𝐴𝑥𝑦 𝐴𝑦𝑦 + 𝐴𝑦 + 𝐴𝑦𝑦 𝐴𝑦 )) Tan[2θ2 ] + Tan[2θ1 ](𝜂 + 𝜉 Tan[2θ2 ]) = 0
Note that if 𝜂 + 𝜉 Tan[2θ2 ] ≠ 0, as was shown earlier to be the case here, then 𝜃1 such
that:
Tan[2θ1 ] =
−4𝐴𝑦𝑦 + 4(𝐴𝑦 + 𝐴𝑦𝑦 𝐴𝑥𝑦 + 𝐴𝑦𝑦 𝐴𝑦 ) Tan[2θ2 ]
(𝜂 + 𝜉 Tan[2θ2 ])
solves equation (IV).
𝜋
Note that once Tan[2𝜃1 ] is determined, 𝜃1 is determined modulo 2 . However, we assume
𝜋
that 0 ≤ 𝜃1 , 𝜃2 < 2 , so determining 𝜃1 up to
𝜋
𝜋
2
is enough. Moreover, we know that if
1
𝜃1 → 𝜃1 + 2 , then if also 𝜆1 → 𝜆 the Pareto front doesn’t change. Examining the term for
1
𝜆1 , we see this symmetry.
𝜋
To conclude, for each 𝜃2 ≠ 4 , there is a single 𝜃1 in the range 0 ≤ 𝜃1 <
𝜃1 , 𝜃2 , 𝜆(𝜃1 ), 𝜆(𝜃2 ) generate the hyperbola.
𝜋
(B) 𝜃2 = 4 :
In that case, 𝜃1 =
𝜋
4
is a solution to the equation if and only if 𝜉 = 0.
33
𝜋
2
such that
𝜋
Otherwise, 𝜃1 ≠ 4 , and we can divide by cos[2𝜃1 ] to get:
2(𝜂 + 𝜉 tan[2θ1 ]) = 0
Again, for a hyperbola, it is not possible that both 𝜂 and 𝜉 are zero, so the only way that
𝜂
the equation will be satisfied is if tan[2θ1 ] = 𝜉 .
To conclude, for every value of 𝜃2 , we can determine a unique value for 𝜃1 in the range
𝜋
[0, 2 ) such that the hyperbola on which lies the Pareto front that is generated by the 2
norms 𝑀1 (𝜆1 (𝜃1 ), 𝜃1 ), 𝑀2 (𝜆2 (𝜃2 ), 𝜃2 ) is the same as the hyperbola described by 𝑥 2 −
𝑥 + 2𝐴𝑥𝑦 𝑥𝑦 + 𝐴𝑦𝑦 𝑦 2 + 2𝐴𝑦 𝑦 = 0. The 𝜃1 that matches 𝜃2 is given by:
θ1 =
𝜋
If 𝜃2 ≠ 4 , tan[2𝜃2 ] ≠
4𝐴𝑦𝑦 + 𝜂 tan[2θ2 ]
1
arctan[
]
(𝜂 + 𝜉 tan[2θ2 ])
2
𝜂
𝜉
θ1 =
𝜋
𝜋
4
𝜂
If 𝜃2 ≠ 4 , tan[2𝜃2 ] = 𝜉 , 𝜉 ≠ 0
θ1 =
If 𝜃2 =
1
𝜂
arctan [ ]
2
𝜉
𝜋
4
Note that this describes a 1-dimensional continuous curve. When 𝜃2 ≠
𝜂
1
𝑇𝑎𝑛[2𝜃2 ] → 𝜉 , then 𝜃1 = 2 𝐴𝑟𝑐𝑇𝑎𝑛 [
4𝐴𝑦𝑦 +𝜂 tan[2θ2 ]
(𝜂+𝜉 tan[2θ2 ])
𝜋
1
]→
2
𝜋
4
and
𝐴𝑟𝑐𝑇𝑎𝑛[∞] =
𝜋
4
𝜂
which is the solution when 𝜃2 ≠ 4 , 𝑇𝑎𝑛[2𝜃2 ] = 𝜉 .
𝜋
𝜋
1
When 𝜃2 → 4 , then the solution when 𝜃2 ≠ 4 , θ1 = 2 arctan[
1
𝜂
𝜋
θ1 = 2 arctan [𝜉 ] which is the solution when 𝜃2 = 4 .
34
4𝐴𝑦𝑦 +𝜂 tan[2θ2 ]
(𝜂+𝜉 tan[2θ2 ])
] goes to
Note that 𝜃2 ≠ 𝜃1 since we assume 𝐴𝑦𝑦 ≠ −1, so when 𝜃2 →
𝜋
4
𝜋
4
it is okay to assume 𝜃1 ≠
.
To conclude, for every 𝜃2 , there is a single 𝜃1 (𝜃2 ), such that norms with the parameters
𝜃1 (𝜃2 ), 𝜃2 , 𝜆12 (𝜃1 (𝜃2 )), 𝜆22 (𝜃2 ) generate the hyperbola. However, those parameters will
represent matrices of inner-product norms only if 𝜆12 (𝜃1 (𝜃2 )) > 0 and 𝜆22 (𝜃2 ) > 0.
Hence, if there exists 𝜃2 such that 𝜆12 (𝜃1 (𝜃2 )) > 0 and 𝜆22 (𝜃2 ) > 0, the norms
represented by 𝜃1 (𝜃2 ), 𝜃2 , 𝜆12 (𝜃1 (𝜃2 )), 𝜆22 (𝜃2 ) will generate the hyperbola. We can find
all norms that generate a given hyperbola by considering all 𝜃2 ′𝑠 for which 𝜆12 (𝜃1 (𝜃2 )) >
0 and 𝜆22 (𝜃2 ) > 0. In that case, we know that there is a 1-dimensional family of norms
that generate this hyperbola. If there doesn’t exist such 𝜃2 , it means that there doesn’t
exist a pair of norms that generates the given hyperbola.
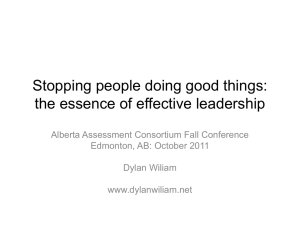
We can examine the existence of such 𝜃2 numerically: we plot 𝜆12 (𝜃1 (𝜃2 )) and 𝜆22 (𝜃2 ),
and check if there is an area where both 𝜆12 and 𝜆22 are positive. An example for such a
plot is given in Fig S3.
To conclude, we showed that we cannot uniquely determine norm pairs that generated a
given front. Some hyperbolae cannot be described as the Pareto front of 2 tasks in 2D.
For those who can be described, there is a one-dimensional family of norm-pairs that
generate them. However, it is generally enough to determine a single parameter of one of
the norms, to completely determine both norms. If such a parameter could be obtained by
other means (e.g. – a biomechanical model, etc.), the above method can be used to
exactly determine the norms, and therefore the relative importance of each trait to the
performance.
35
Fig S2: When considering the set of norm-pairs parameters that generate a given hyperbola,
𝜽𝟏 is a function of 𝜽𝟐 . Here, an example is shown for the hyperbola with parameters as
displayed in the figure.
Fig S3: 𝝀𝟐𝟏 (𝜽𝟏 (𝜽𝟐 )) and 𝝀𝟐𝟐 (𝜽𝟐 ), for 2 different hyperbolae. a) A plot of 𝝀𝟐𝟏 (𝜽𝟏 (𝜽𝟐 )) and
𝟏
𝝀𝟐𝟐 (𝜽𝟐 ) for a hyperbola with the parameters: 𝑨𝒙𝒚 = −𝟗, 𝑨𝒚𝒚 = −𝟓, 𝑨𝒚 = − . It can be
𝟐
seen that there exist 𝜽𝟐 ′𝒔 for which both 𝝀𝟐𝟏 (𝜽𝟏 (𝜽𝟐 )) and 𝝀𝟐𝟐 (𝜽𝟐 ) are positive. This means
36
that there are norms whose Pareto front is the above hyperbola. b) A plot of 𝝀𝟐𝟏 (𝜽𝟏 (𝜽𝟐 )) and
𝟏
𝝀𝟐𝟐 (𝜽𝟐 ) for a hyperbola with the parameters: 𝑨𝒙𝒚 = 𝟑, 𝑨𝒚𝒚 = 𝟏, 𝑨𝒚 = − . It can be seen
𝟑
that there isn’t any 𝜽𝟐 such that both 𝝀𝟐𝟏 (𝜽𝟏 (𝜽𝟐 )) and 𝝀𝟐𝟐 (𝜽𝟐 ) are positive. This means that
this hyperbola cannot be described as the Pareto front of any norm.
37
Appendix S6
Generally, for 3 tasks in a 2D morphospace, the norms can be uniquely determined
by the shape of the Pareto front
Let us assume that we have 3 tasks in a 2𝐷-morphospace. The matrices that describe the
norms that the performance functions depend on are denoted by 𝑀𝑖 , for 𝑖 ∈ {1,2,3}.
Denote the parameters that 𝑀𝑖 depends on with 𝜆𝑖 , 𝜃𝑖 .
The Pareto front in this case is given by (Appendix S1):
3
𝑣 = (∑ 𝛼𝑖 𝑀𝑖 )
𝑖=1
−1
3
3
(∑ 𝛼𝑖 𝑀𝑖 𝑣𝑖∗
𝑖=1
) 𝑠. 𝑡. 0 ≤ 𝛼𝑖 ≤ 1, ∑ 𝛼𝑖 = 1
𝑖=1
As proven in Appendix S7, the boundary of 𝑃1,2,3, the 3-tasks Pareto front, is composed
of the three 2-tasks fronts. Hence, given a dataset, we can take its boundary and assume
that it represents 3 hyperbolae. Denote by 𝑃𝑖,𝑗 the 2-tasks front between 𝑣𝑖∗ and 𝑣𝑗∗ . Since
there are 3 tasks, each one is associated with two 2-tasks fronts. From the front 𝑃𝑖,𝑗 we
can deduce the 1-dimensional family of norm-pairs that generates it, as explained in
𝑖
Appendix S5. Denote this family by ℱ𝑖,𝑗 . Denote by ℱ𝑖,𝑗
the family of norms that are
associated with task 𝑖 and were calculated from the front 𝑃𝑖,𝑗 . Thus, there are 2 families of
𝑖
𝑖
potential norms that task 𝑖 might depend on - ℱ𝑖,𝑗
and ℱ𝑖,𝑘
(𝑖 ≠ 𝑗 ≠ 𝑘). However, each
task can depend only on one norm. It means that if the hyperbolae triad is indeed
𝑖
generated by a norms-triad, then there must be at least one common member between ℱ𝑖,𝑗
𝑖
𝑖
𝑖
and ℱ𝑖,𝑘
. Denote ℱ 𝑖 = ℱ𝑖,𝑗
∩ ℱ𝑖,𝑘
, then ℱ 𝑖 ≠ 𝜙. Choosing a member 𝑛𝑖 ∈ ℱ 𝑖 determines
(see Appendix S5) a member 𝑛𝑖,𝑗 of ℱ𝑖,𝑗 and a member 𝑛𝑖,𝑘 of ℱ𝑖,𝑘 . Those in turn
determine a member 𝑛𝑗 ∈ ℱ𝑗 and 𝑛𝑘 ∈ ℱ 𝑘 . Define 𝑁𝑗,𝑘 = {(𝑛𝑗 , 𝑛𝑘 )|𝑛𝑖 ∈ ℱ 𝑖 }. 𝑁𝑗,𝑘
includes all pairs of norms on which the performance of task 𝑗 and task 𝑘 can depend,
deduced from looking on task 𝑖. On the other hand, task j and task k generate 𝑓𝑗,𝑘 . This
means that the existence of a triplet of norms that generate the Pareto front requires that
𝑁𝑗,𝑘 ∩ 𝑓𝑗,𝑘 ≠ 𝜙.
38
Hence, three cases are possible:
(I)
|𝑁𝑗,𝑘 ∩ ℱ𝑗,𝑘 | = 1. In that case, there is only one triplet of norms that generates
the given Pareto front.
(II)
|𝑁𝑗,𝑘 ∩ ℱ𝑗,𝑘 | > 1. In that case, the norms-triplet cannot be determined
uniquely from the front.
(III)
|𝑁𝑗,𝑘 ∩ ℱ𝑗,𝑘 | = 0. In that case, the hyperbole-bound triangular shape
corresponds to no triplet of norms and hence cannot be explained in the scope
of the current model.
Let’s check under what conditions each of the above cases occur. But first, we prove the
following lemma:
Lemma 1: Let 𝑃𝑖,𝑗 be the Pareto front associated with tasks 𝑖 and 𝑗.
If one of the following occurs:
𝑗
𝑖
(I) 𝐼 ∈ ℱ𝑖,𝑗
or 𝐼 ∈ ℱ𝑖,𝑗 (where 𝐼 is identity matrix, representing the Euclidean norm)
(II) ∃(𝑚1 , 𝑚2 ) ∈ ℱ𝑖,𝑗 such that 𝜃1 = 𝜃2 .
Then for every 𝜆 > 0 there is a norm-pair that generate 𝑃𝑖,𝑗 given by
1
0
𝑚1 = 𝑅[𝜃𝑖,𝑗 ] (
0
) 𝑅[−𝜃𝑖,𝑗 ]
𝜆2
1
0
𝑚2 = 𝑅[𝜃𝑖,𝑗 ] (0 𝐶 𝜆2 ) 𝑅[−𝜃𝑖,𝑗 ]
𝑖,𝑗
where 𝐶𝑖,𝑗 > 0 and 𝜃𝑖,𝑗 are constant determined by the parameters of 𝑃𝑖,𝑗 .
̃𝑖∗ = (0,0), 𝑣𝑗∗ ↦ ̃
Proof: We transform to a coordinate system where 𝑣𝑖∗ ↦ 𝑣
𝑣𝑗∗ = (1,0).
This transformation is a combination of a translation, a rotation by an angle 𝜃̃, and an
isomorphic scaling. Under those transformations, the parameters of the norms transform
in the following way:
39
𝜆1 ↦ 𝜆̃1 = 𝜆1 ,
𝜆2 ↦ 𝜆̃2 = 𝜆2 ,
𝜃1 ↦ 𝜃̃1 = 𝜃1 + 𝜃̃,
𝜃2 ↦ 𝜃̃2 = 𝜃2 + 𝜃̃
It means that if condition (I) or (II) holds in the original coordinate system, it will hold in
the transformed coordinate system. So either way, from Appendix S5 we know that in the
transformed coordinate system, 𝑃𝑖,𝑗 ↦ 𝑃̃
𝑖,𝑗 whose parameter 𝐴𝑦𝑦 = −1. In that scenario,
̃
the family of norm pairs that generate 𝑃̃
𝑖,𝑗 , ℱ𝑖,𝑗 , was fully classified in Appendix S5:
̃2
̃2
̃ ̃
̃
ℱ
̃ 1, 𝑚
̃ 2 ) 𝑠. 𝑡. 𝜃̃1 = 𝜃̃2 = 𝜃̃
𝑖,𝑗 = (𝑚
𝑖,𝑗 , 𝜆2 = 𝐶𝑖,𝑗 𝜆1 , for 𝜃𝑖,𝑗 , 𝐶𝑖,𝑗 > 0 that are determined
by the parameters of the hyperbola 𝑃̃
𝑖,𝑗 . Going back to the original coordinate system, we
̃
can deduce that ℱ𝑖,𝑗 = (𝑚1 , 𝑚2 ) 𝑠. 𝑡. 𝜃1 = 𝜃2 = 𝜃𝑖,𝑗 , 𝜆22 = 𝐶𝑖,𝑗 𝜆12, for 𝜃𝑖,𝑗 = 𝜃̃
𝑖,𝑗 − 𝜃 ,
𝐶𝑖,𝑗 = 𝐶̃
𝑖,𝑗 . ∎
Consider a hyperbole-bound triangular shape with vertices 𝑣1∗ , 𝑣2∗ , 𝑣3∗ . Denote ℱ𝑖,𝑗 as
above. For now we assume that there is a triplet of norms – 𝑀1 , 𝑀2 , 𝑀3 - that generate that
shape, i.e. ℱ𝑖,𝑗 ∩ 𝑁𝑖,𝑗 ≠ 𝛷. We will attempt to characterize when this norm-triplet is
unique, and show that if it is not unique, there exists a 1-dimensional family of normtriplets that generate the same 𝑃1,2,3.
We choose coordinate system such that 𝑀1 = 𝐼. This is possible as shown in Appendix
S2. In that case, from lemma 1 we know that ℱ1,2 - the family of norm pairs that generate
𝑃1,2 , contains norms for which 𝜃1 = 𝜃2 =: 𝜃1,2 and
λ22
λ21
=: 𝐶1,2 , where 𝐶1,2 > 0, 𝜃1,2 are
defined by the parameters of 𝑃1,2 . Lemma 1 also tell us that ℱ1,3- the family of norm pairs
that generate 𝑃1,3 - contains norms for which 𝜃1 = 𝜃3 =: 𝜃1,3 and
λ23
λ21
=: 𝐶1,3 , where 𝐶1,3 >
0, 𝜃1,3 are defined by the parameters of 𝑃1,3 .
There are 2 cases, either 𝜃1,3 ≠ 𝜃1,2 or 𝜃1,3 = 𝜃1,2 .
Claim 1: If 𝜃1,3 ≠ 𝜃1,2 , then ℱ 1 = {𝑀1 } = {𝐼}, and the norm-triplet is unique.
1
1
Proof: Let 𝑀′ ∈ ℱ 1 ⇒ 𝑀′ ∈ ℱ1,2
and 𝑀′ ∈ ℱ1,3
. From the above conclusions on ℱ1,2
and ℱ1,3 we deduce that on one hand 𝜃𝑀′ = 𝜃1,3 and on the other hand 𝜃𝑀′ = 𝜃1,2 . If
𝜃1,3 ≠ 𝜃1,2 , the only possibility to resolve the conflict is if 𝜆𝑀′ = 1 and then 𝑀′ = 𝐼,
40
since in this case the norm is Euclidean and 𝜃 is meaningless. 𝑀1 is thus determined
uniquely, and since 𝑀2 is determined uniquely by 𝑀1 and also 𝑀3 is determined uniquely
by 𝑀1 . This means that there is only one triplet of norms that generates the Pareto front
⇒ we can uniquely deduce the norms that he performance functions depend on from the
Pareto front. ∎
Claim 2: If 𝜃1,3 = 𝜃1,2 , then there’s a 1-dimensional family of norm-triplets that
generates the given 𝑃1,2,3.
1
1
1
Proof: In that case ℱ1,2
= ℱ1,3
. This is true since according to lemma 1 ℱ1,2
contains all
1
norms with 𝜃 = 𝜃1,2 and any 𝜆 > 0, and ℱ1,3
contains all norms with 𝜃 = 𝜃1,3 and any
1
1
1
1
1
𝜆 > 0. Since ℱ 1 = ℱ1,2
∩ ℱ1,3
we get that ℱ 1 = ℱ1,2
= ℱ1,3
. ℱ1,2
is infinite since ℱ1,2 is
infinite (Appendix S5) and hence ℱ 1 is infinite. Under the current assumptions, there is
𝑀1 ∈ ℱ 1 with (𝑀2 , 𝑀3 ) ∈ ℱ2,3 (i.e. the norm 𝑀2 that is paired with 𝑀1 in ℱ1,2 and the
norm 𝑀3 that is paired with 𝑀1 in ℱ1,3 generate 𝑃2,3 ). Note that 𝑀2 and 𝑀3 both have the
same angle 𝜃. In that case, from lemma 1 we get that (𝑚2 , 𝑚3 ) ∈ 𝑓2,3 ⇔ 𝜃2 = 𝜃3 =
𝜃2,3 𝑎𝑛𝑑 𝜆23 = 𝐶2,3 𝜆22, for 𝜃2,3 and 𝐶2,3 determined by the parameters of the hyperbola.
(𝑀2 , 𝑀3 ) generates 𝑃2,3, and thus
𝜆2𝑀2
𝜆2𝑀3
= 𝐶2,3 and θM2 = θM3 = 𝜃2,3 . In addition,
(𝑀1 , 𝑀2 ) ∈ ℱ1,2 ⇒ 𝜆2M2 = 𝐶1,2 𝜆2𝑀1 .
(𝑀1 , 𝑀3 ) ∈ ℱ1,3 ⇒ 𝜆2M3 = 𝐶1,3 𝜆2𝑀1 .
⇒ 𝐶2,3 =
𝜆2M3
𝜆2M2
𝐶1,3 𝜆2𝑀1
=𝐶
2
1,2 𝜆𝑀1
Now take another
𝑀1′
𝐶
= 𝐶1,3 , and θM1 = θM2 = 𝜃1,2 = 𝜃1,3 = θM3 = 𝜃2,3.
1,2
1
∈ ℱ . We know that,
𝜆2𝑀′
2
=
𝐶1,2 𝜆2𝑀′
1
,
𝜆2𝑀′
3
=
𝐶1,3 𝜆2𝑀′
1
⇒
𝜆2 ′
𝑀
3
𝜆2 ′
𝑀
=
2
𝐶1,3 𝜆2 ′
𝑀
1
𝐶1,2 𝜆2 ′
𝑀1
=
𝐶1,3
𝐶1,2
= 𝐶2,3 . We also know that θ𝑀1′ = θ𝑀2′ , θ𝑀1′ = θ𝑀3′ ⇒ θ𝑀2′ = θ𝑀3′ ⇒
(𝑀2′ , 𝑀3′ ) ∈ ℱ2,3. Hence, every 𝑀1′ ∈ ℱ 1 is a part of a norm-triplet that generates the
hyperbolae triplet. Since ℱ 1 is infinite, it means that there are infinite number of normtriplets that generate the given hyperbolae-bound shape. The family is defined by one of
41
the 𝜆 parameters, since all 𝜃s are known, and every other 𝜆 is determined by the
respective 𝐶 constant. ∎
Those conclusions are true in the frame where 𝑀1 = 𝐼 – i.e. – there is a norm triplet that
generates the Pareto front in which the norm associated with task 1 is Euclidean. We can
go back to the original coordinate system by rotating, translating and rescaling the space.
Those transformations are invertible, so there is a 1-to-1 correspondence between normtriplets that generates the shape in the transformed coordinate system and norm-triplets
that generates the shape in the original coordinate system.
It can be seen that most of hyperbolae-bound triangular shapes that correspond to norms
triplets correspond to a single triplet, since it is much more common that 𝜃1 ≠ 𝜃2 .
This method can be used to find the norms that generate a given hyperbolae-bound
1
1
triangular shape. We can fit 𝑃1,2 and 𝑃1,3 , and find ℱ1,2 and ℱ1,3. Then, we find ℱ1,2
, ℱ1,3
1
1
and ℱ 1 = ℱ1,2
∩ ℱ1,3
. If ℱ 1 = ϕ we deduce that the shape corresponds to no norms-
triplet. Otherwise, we choose 𝑀1 ∈ ℱ 1 . We change coordinate system such that 𝑀1 = 𝐼
while 𝑣1∗ , 𝑣2∗ are at (0,0), (1,0), respectively. From the transformed 𝑓1,2 and 𝑓1,3 , we find
𝜃1,2 and 𝜃1,3 . Examining if 𝜃1,2 = 𝜃1,3 determines if the solution is unique or degenerate.
42
Appendix S7
The boundary of the 3-tasks Pareto front is composed of the three 2-tasks Pareto
fronts
In this Appendix, we will show that the boundary of the Pareto front associated with 3
tasks in a 2D morphospace is composed of the 3 Pareto fronts associated with each pair
of tasks
Consider the Pareto front defined by tasks i, j , denoted by 𝑃𝑖,𝑗 . As seen before - this front
is a section of a hyperbola (or a line as a special case).
Denote the hyperbola branch that contains 𝑃𝑖,𝑗 by 𝐵𝑖,𝑗 and the entire hyperbola by 𝐻𝑖,𝑗 (in
case 𝑃𝑖,𝑗 is a line, 𝐵𝑖,𝑗 = 𝐻𝑖,𝑗 ). The hyperbola branch divides the space into 3 parts – one
side of 𝐵𝑖,𝑗 , 𝐵𝑖,𝑗 itself and the other side of 𝐵𝑖,𝑗 .
Denote by 𝑃1,2,3 the Pareto front associated with all three tasks.
First note that ∀𝑖, 𝑗: 𝑃𝑖,𝑗 ⊆ 𝑃1,2,3 : If 𝑣 ∈ 𝑃𝑖,𝑗 , then for every 𝑣 ′ ≠ 𝑣, there is 𝑘 ∈ {𝑖, 𝑗}
such that 𝑃𝑘 (𝑣 ′ ) < 𝑃𝑘 (𝑣), and specifically there is 𝑘 ∈ {1,2,3} such that 𝑃𝑘 (𝑣 ′ ) < 𝑃𝑘 (𝑣)
⇒ 𝑣 ∈ 𝑃1,2,3 ⇒ 𝑃𝑖,𝑗 ⊂ 𝑃1,2,3 .
For convenience sake, and without loss of generality, we assume that the gradient 𝑔𝑖 =
𝛻𝑃𝑖 is normalized (𝑔𝑖 ≠ 0 except at the archetype 𝑣𝑖∗ , everywhere else we can redefine
𝑔
𝑔𝑖 ≔ ‖𝑔𝑖 ‖).
𝑖
For now, assume that for 𝑖, 𝑗, 𝑘 ∈ {1,2,3} such that 𝑖 ≠ 𝑗 ≠ 𝑘, 𝐻𝑖,𝑗 ≠ 𝐻𝑖,𝑘 . The case
where there are overlapping hyperbolae will be discussed later.
We will implicitly consider the 2-dimensional morphospace V as embedded in a 3dimensional vector space in the trivial way ((𝑥, 𝑦) ↦ (𝑥, 𝑦, 0)) for the use of operations
such as cross product. So expressions such as 𝑔𝑖 × 𝑔𝑗 should be understood as operations
in the 3-dimensional space, while operations such as 𝜕𝑃 should be understood as
operations in the original 2-dimensional space.
43
Consider the functional 𝑓𝑖,𝑗 = 𝜋𝑧 ∘ (𝑔𝑖 × 𝑔𝑗 ), where 𝜋𝑧 is the standard projection
function 𝜋𝑧 (𝑥, 𝑦, 𝑧) = 𝑧. 𝑔𝑖 × 𝑔𝑗 = (0,0, ‖𝑔𝑖 ‖‖𝑔𝑗 ‖ sin[𝜃𝑖,𝑗 ]), where 𝜃𝑖,𝑗 is the angle
between 𝑔𝑖 and 𝑔𝑗 , measured anticlockwise from 𝑔𝑖 to 𝑔𝑗 , so we get
𝑓(𝑣) = ‖𝑔𝑖 (𝑣)‖‖𝑔𝑗 (𝑣)‖ sin[𝜃𝑖,𝑗 ]
Lemma 1: On 𝐵𝑖,𝑗 , 𝑓𝑖,𝑗 ≡ 0. On one side of 𝐵𝑖,𝑗 , close enough to it, 𝑓𝑖,𝑗 > 0, and on the
other side of 𝐵𝑖,𝑗 , close enough to it, 𝑓𝑖,𝑗 < 0.
Proof: First note that 𝑓 is continuous as a projection of a cross product of 2 continuous
functions.
As we demonstrated before – on the Pareto front 𝑃𝑖,𝑗 , the gradients point in opposite
directions, meaning sin[𝜃𝑖,𝑗 ] = 0, which implies 𝑓𝑖,𝑗 = 0.
We’ve also seen that 𝑃𝑖,𝑗 is part of a hyperbola (or line) 𝐻𝑖,𝑗 . 𝐻𝑖,𝑗 is given by a quadratic
(or linear) form 𝐻 such that 𝐻𝑖,𝑗 = {𝑣|𝐻(𝑣) = 0}
𝑓𝑖,𝑗 is also a quadratic (or linear) form (as a cross product of two linear forms), and
𝑓𝑖,𝑗 |𝑃 ≡ 𝐻|𝑃𝑖,𝑗 ≡ 0, which implies 𝑓 = 𝛼𝐻 for some 𝛼 ∈ ℝ.
𝑖,𝑗
In case 𝑃𝑖,𝑗 is a line – 𝑓𝑖,𝑗 is a linear functional and it is trivial that it is negative on one
half space, and positive on the other.
In the case where 𝑃𝑖,𝑗 is a hyperbola – by definition 𝑓𝑖,𝑗 = 𝛼𝐻 = 0 on the hyperbolae
(both branches). We’ll show that it changes sign between the 3 connected components of
ℝ2 ∖ 𝐻𝑖,𝑗 - let h be the line between the 2 foci of the hyperbola. h intersects each branch
44
of the hyperbola exactly once. Consider the function 𝑓𝑖,𝑗 ∘ ℎ - it is a quadratic real
function of a single parameter (since 𝑓𝑖,𝑗 : ℝ → ℝ2 is quadratic in 2 variables and ℎ: ℝ →
ℝ is linear). 𝑓𝑖,𝑗 ∘ ℎ = 0 on both intersections of ℎ with 𝐻𝑖,𝑗 . It means that 𝑓|ℎ has to
change sign once it passes the hyperbola. So on one side of a branch of the hyperbola
𝑓𝑖,𝑗 |ℎ is positive and on the other side it is negative.
Of course 𝑓𝑖,𝑗 is continuous, and 𝑓𝑖,𝑗 ≠ 0 on ℝ2 ∖ 𝐻𝑖,𝑗 , so its sign is constant across the
connected components. Hence, on one side of 𝐵𝑖,𝑗 , 𝑓𝑖,𝑗 is positive, and on the other side
𝑓𝑖,𝑗 is negative (as long as the other branch of the hyperbola is not approached).
All in all, in a neighborhood of 𝐵𝑖,𝑗 (and hence of 𝑃𝑖,𝑗 ), 𝑓𝑖,𝑗 is positive on one side of 𝐵𝑖,𝑗 ,
negative on the other side of 𝐵𝑖,𝑗 , and 0 on 𝐵𝑖,𝑗 . ∎
𝑓𝑖,𝑗 > 0 implies that 𝑔𝑗 is less than 𝜋 radians anticlockwise than 𝑔𝑖 , 𝑓𝑖,𝑗 < 0 implies that
𝑔𝑗 is more than 𝜋 radians anticlockwise than 𝑔𝑖 . We would like to show that 𝑃𝑖,𝑗 is at the
boundary of 𝑃1,2,3, the Pareto front associated with all 3 tasks. To do so, we need to show
that
∀ 𝑣 ∈ 𝑃𝑖,𝑗 𝑎𝑛𝑑 ∀𝜖 > 0: ∃𝑣 ′ ∈ 𝐵0 (𝑣, 𝜖) 𝑠. 𝑡. 𝑣 ′ ∈ ℝ2 \𝑃1,2,3
where 𝐵0 (𝑣, 𝜖) is an open ball of radius 𝜖 around 𝑣.
Theorem 2: ∀𝑖, 𝑗 (𝑖 ≠ 𝑗): 𝑃𝑖,𝑗 ⊆ 𝜕𝑃1,2,3
Proof: Assume without loss of generality that 𝑖 = 1, 𝑗 = 2 (the proof will be identical for
any pair of 𝑖, 𝑗 as long as 𝑖 ≠ 𝑗). Assume by negation 𝑃1,2 is not at the boundary of 𝑃1,2,3,
it means that there exist 𝑣 ∈ 𝑃1,2 and 𝜖 > 0 such that 𝐵0 (𝑣, 𝜖) ⊂ 𝑃1,2,3.
45
Let 𝜖 > 0, and 𝑢 ∈ 𝐵0 (𝑣, 𝜖).
Claim 2: For 𝑢 ∈ 𝑃1,2,3, 𝑓𝑖,𝑗 (𝑢) (𝑗 ≠ 𝑖) and 𝑓𝑖,𝑘 (𝑢) (𝑘 ≠ 𝑖, 𝑗) can’t be neither both
positive nor both negative.
Proof:
Assume 𝑓𝑖,𝑗 > 0 ⇒ 𝑔𝑗 is less than 𝜋 radians anticlockwise to 𝑔𝑖 .
In this case 𝑓𝑖,𝑘 can’t be positive: If 𝑓𝑖,𝑘 > 0, it means that 𝑔𝑘 is less than 𝜋 radians
anticlockwise to 𝑔𝑖 . In this case all three gradients lie in the same half-space -choose the
gradient 𝑔𝑚 that has the maximal angle with 𝑔𝑖 (𝑚 = 𝑎𝑟𝑔𝑚𝑎𝑥𝑚 {𝑓𝑖,𝑚 }). The angle
between 𝑔𝑖 and 𝑔𝑚 is smaller than 𝜋 (because both gradients are less than 𝜋 radians
anticlockwise from 𝑔𝑖 . Choose ℎ𝑢 to be the unit vector bisecting the angle between 𝑔𝑖
and 𝑔𝑚 (ℎ𝑢 =
𝑔̂𝑖 +𝑔̂𝑚
2
𝜋
). The angle between ℎ𝑢 and each gradient is smaller than 2 . Then,
∀𝑛: ℎ𝑢 ⋅ 𝑔𝑛 > 0. However, we showed in Appendix S1 that 𝑢 is Pareto optimal if and
only if there doesn’t exists a vector ℎ𝑢 such that ∀𝑛: ℎ𝑢 ∙ g n > 0. Since 𝑢 ∈ 𝑃1,2,3 (e.g. is
Pareto optimal), we must conclude that 𝑓𝑖,𝑘 ≯ 0.
To show that 𝑓𝑖,𝑗 , and 𝑓𝑖,𝑘 can’t both be negative, follow the above proof while changing
the word “anticlockwise” to “clockwise”. ∎
Corollary 1: For 𝑢 ∈ 𝑃1,2,3, such that ∀𝑖, 𝑗: 𝑢 ∉ 𝐻𝑖,𝑗 - 𝑠𝑔𝑛 (𝑓1,2 (𝑢)) = 𝑠𝑔𝑛 (𝑓2,3 (𝑢)) =
𝑠𝑔𝑛 (𝑓3,1 (𝑢)).
46
Proof: This results directly from the claim, the anti-symmetry of 𝑓𝑖,𝑗 , and the fact that
𝑓𝑖,𝑗 (𝑢) = 0 ⇔ 𝑢 ∈ 𝐻𝑖,𝑗
Claim 3: If 𝑢 ∉ 𝑃1,2,3 and 𝑢 ∉ 𝐻𝑖,𝑗 for any 𝑖, 𝑗, not all 𝑓1,2 (𝑢), 𝑓2,3 (𝑢), 𝑓3,1 (𝑢) have the
same sign (see Figure S4)
Proof: According to Conclusion 1 from Appendix S1, since 𝑢 is not Pareto optimal, all
three gradients 𝑔1 , 𝑔2 , 𝑔3 lie in the same half-space. Choose a vector 𝑙 on the line
separating the two half-spaces such that 𝜋𝑧 (𝑙 × 𝑔𝑖 ) are all positive (they are either all
positive or all negative since they are all in the same half-space). If we order the gradients
according to their anticlockwise angle from 𝑙 (they are all smaller than 𝜋) and name them
𝑔𝑖 , 𝑔𝑗 , 𝑔𝑘 we get that 𝑓𝑖,𝑗 > 0, 𝑓𝑗,𝑘 > 0 but 𝑓𝑘,𝑖 < 0, since the anticlockwise angles from 𝑖
to 𝑗, from 𝑗 to 𝑘 and from 𝑖 to 𝑘 are smaller than 𝜋 radians (they are all non-zero since 𝑢
is not on any hyperbola), and since 𝑓 is anti-symmetric 𝑓𝑖,𝑘 ≥ 0 ⇒ 𝑓𝑘,𝑖 ≤ 0.
This proves the claim for every assignment of 𝑖, 𝑗, and 𝑘.
Corollary 2: a point 𝑢 ∈ 𝑉, which is not on any hyperbola 𝐻𝑖,𝑗 is Pareto optimal if, and
only if, 𝑠𝑔𝑛 (𝑓1,2 (𝑢)) = 𝑠𝑔𝑛 (𝑓2,3 (𝑢)) = 𝑠𝑔𝑛 (𝑓3,1 (𝑢)).
Now, it is clear that if 𝑢 ∈ 𝑃𝑖,𝑗 , in every neighborhood of 𝑢 there are points from both
sides of 𝑃𝑖,𝑗 , meaning points with 𝑓𝑖,𝑗 > 0 and points with 𝑓𝑖,𝑗 < 0. This means that every
point on 𝑃𝑖,𝑗 that is not any other hyperbola 𝐻𝑘,𝑙 (i.e. not an intersection point), if it has
Pareto optimal points on one side of 𝑃𝑖,𝑗 , on the other side there are no Pareto optimal
points (since only 𝑓𝑖,𝑗 changes sign on 𝐻𝑖,𝑗 ).
If the point 𝑢 ∈ 𝑃𝑖,𝑗 is an intersection of two or more hyperbolae 𝐻𝑖,𝑗 and some 𝐻𝑘,𝑙 (not
necessarily on 𝑃𝑘,𝑙 ), then in every neighborhood there are points on 𝑃𝑖,𝑗 that are not
47
intersection points (the number of intersection points between 2 hyperbolae/lines is finite)
and therefore in that neighborhood there are points that are not Pareto optimal. Note that
the archetypes, for example, are at the intersection of 𝑃𝑖,𝑗 with 𝑃𝑖,𝑘 .
Thus – any point 𝑢 ∈ 𝑃𝑖,𝑗 for every pair of 𝑖, 𝑗, is not in the interior of 𝑃1,2,3, but since it is
in 𝑃1,2,3 it must be in 𝜕𝑃1,2,3. ∎
Theorem 3: For every 𝑢 ∈ 𝑃1,2,3 , if 𝑢 ∉ 𝑃𝑖,𝑗 for any 𝑖, 𝑗, then 𝑢 ∉ 𝜕𝑃1,2,3
Proof 3: First, we will show that 𝑢 is not on any hyperbola. If it were on some 𝐻𝑖,𝑗 , then
𝑔𝑖 (𝑢) × 𝑔𝑗 (𝑢) = 0. But since 𝑢 ∉ 𝑃𝑖,𝑗 then the gradients 𝑔𝑖 and 𝑔𝑗 cannot point to
opposite directions, so they must point in the same direction. i.e. 𝑔𝑖 + 𝛼𝑔𝑗 = 0 but 𝛼 <
0. Since 𝑢 is Pareto optimal, then the third gradient 𝑔𝑘 (𝑘 ≠ 𝑖, 𝑗) must point in the
opposite direction (otherwise there was ℎ s.t. ∀𝑛: ℎ ⋅ 𝑔𝑛 > 0, namely ℎ =
𝑔𝑖 +𝑔𝑘
2
). So we
get that 𝑔𝑖 and 𝑔𝑘 must point in opposite directions, which means that 𝑢 ∈ 𝑃𝑖,𝑘 , which is
in contradiction to the assumption.
So 𝑢 is not on any hyperbola, and hence there is a neighborhood of 𝑢 that doesn’t include
any point of 𝐻𝑖,𝑗 for each i,j. If 𝑢 is Pareto optimal, then the signs of 𝑓1,2 , 𝑓2,3 , 𝑓3,1 are all
equal on 𝑢, but since all 𝑓′𝑠 change signs only on the hyperbolae, they all have the same
sign in a neighborhood of 𝑢, which means that there is a neighborhood of 𝑢 which is
Pareto optimal, i.e. – 𝑢 is in the interior of 𝑃1,2,3.∎
Theorem 4: 𝜕𝑃1,2,3 = 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1
We showed that ∀𝑖, 𝑗: 𝑃𝑖,𝑗 ⊂ 𝜕𝑃1,2,3, and that for every 𝑢 ∈ 𝑃1,2,3, such that 𝑢 ∉ 𝑃𝑖,𝑗 for
any 𝑖, 𝑗, then 𝑢 ∉ 𝜕𝑃1,2,3. All that remains to be shown is that if 𝑢 ∉ 𝑃1,2,3, then 𝑢 ∉
𝜕𝑃1,2,3. That is true because 𝑃1,2,3 is a closed set. In Appendix S1 we showed that:
48
𝑃1,2,3 = {(∑𝑖 𝛼𝑖 𝑀𝑖 )−1 ∑𝑖(𝛼𝑖 𝑀𝑖 𝑣𝑖∗ ) |𝛼𝑖 ≥ 0, ∑3𝑖=1 𝛼𝑖 = 1}
So 𝑃1,2,3 is the image of the (compact) unit triangle (0 ≤ 𝛼1 + 𝛼2 ≤ 1) under the
continuous mapping
−1
𝛼1 , 𝛼2 ↦ 𝛼1 , 𝛼2 , 1 − 𝛼1 − 𝛼2 ↦ (∑ 𝛼𝑖 𝑀𝑖 )
𝑖
∑(𝛼𝑖 𝑀𝑖 𝑣𝑖∗ )
𝑖
(It is continuous since ∑𝑖 𝛼𝑖 𝑀𝑖 is a non negative combination of positive definite
matrices, and not all coefficients are zero, and hence it is positive definite, and hence
always invertible).
The image of compact sets are compact, and specifically closed, so there cannot be any
points outside 𝑃1,2,3 in 𝜕𝑃1,2,3. ∎
Lemma: For every 𝑖 ≠ 𝑗 ≠ 𝑘, 𝐻𝑖,𝑗 and 𝐻𝑘,𝑖 can intersect only once except in the
archetype 𝐴𝑖 .
Proof: First note that 𝐻𝑗,𝑘 goes through any intersection point between 𝐻𝑖,𝑗 and 𝐻𝑘,𝑖 . Let 𝑡
be an intersection point between 𝐻𝑖,𝑗 and 𝐻𝑘,𝑖 . 𝑡 ∈ 𝐻𝑖,𝑗 . As shown earlier this implies that
𝑔𝑖 (𝑡) ∥ 𝑔𝑗 (𝑡). 𝑡 ∈ 𝐻𝑘,𝑖 ⇒ 𝑔𝑖 (𝑡) ∥ 𝑔𝑘 (𝑡). From the above two conclusions we can
conclude that 𝑔𝑗 (𝑡) ∥ 𝑔𝑘 (𝑡) ⇒ 𝑡 is on 𝐻𝑗,𝑘 . We see that except the archetypes, each
intersection point between 2 of the hyperbolae is actually an intersection point between
all 3 hyperbolae. Two different hyperbolae can intersect only 4 times. As each pair of
hyperbolae intersect at an archetypes, it means that excluding the archetypes, there are at
most 3 intersection points between the hyperbolae, and specifically a total of at most 3
intersection points between any 𝑃𝑖,𝑗 and any 𝑃𝑘,𝑗 .
We showed that 𝜕𝑃1,2,3 = 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1. We now want to show that there are points
𝑣 ∈ 𝑃1,2,3 such that 𝑣 ∉ 𝑃𝑖,𝑗 for any {𝑖, 𝑗} ∈ {1,2,3} (i.e. – there are Pareto optimal points
beside the 3 2-tasks Pareto fronts).
49
Lemma: Let 𝑣 ∈ 𝑃𝑖,𝑗 such that 𝑣 is not an intersection point between 𝐻𝑖,𝑗 and any other
∗)
hyperbola 𝐻𝑖,𝑘 . Then, if 𝑣 = (∑𝑚 𝛼𝑚 𝑀𝑚 )−1 ∑𝑚(𝛼𝑚 𝑀𝑚 𝑣𝑚
for 𝛼𝑚 ≥ 0, ∑3𝑖=1 𝛼𝑖 = 1,
then 𝛼𝑘 = 0, for 𝑘 ∈ {1,2,3}, 𝑘 ≠ 𝑖, 𝑗.
∗)
∗
Proof: 𝑣 = (∑𝑚 𝛼𝑚 𝑀𝑚 )−1 ∑𝑚(𝛼𝑚 𝑀𝑚 𝑣𝑚
⇒ ∑𝑚 𝛼𝑚 𝑀𝑚 (𝑣 − 𝑣𝑚
) = 0 . However, we
showed that we can
∗ )𝑇
∗
𝑃𝑚 (𝑣) = −(𝑣 − 𝑣𝑚
𝑀𝑚 (𝑣 − 𝑣𝑚
). Hence,
assume that
∑𝑚 𝛼𝑚 𝑔𝑚 (𝑣) = 0. 𝑣 ∈ 𝑃𝑖,𝑗 , so 𝑔𝑖 ||𝑔𝑗 ⇒ 𝛼𝑖 𝑔𝑖 + 𝛼𝑗 𝑔𝑗 = 𝑐 𝑔𝑖 ⇒ 𝑐 𝑔𝑖 + 𝛼𝑘 𝑔𝑘 = 0 (𝑘 ∈
{1,2,3}, 𝑘 ≠ 𝑖, 𝑗). Since 𝑣 is not an intersection point between 𝐻𝑖,𝑗 and any other
hyperbola, 𝑣 is not an archetype, so 𝑔𝑖 (𝑣) ≠ 0. Also, it means that 𝑔𝑖 (𝑣) ∦ 𝑔𝑘 (𝑣), as
otherwise 𝑣 would be on 𝐻1,3. It means that 𝑐 𝑔𝑖 + 𝛼𝑘 𝑔𝑘 = 0 ⇔ 𝑐 = 0 𝑎𝑛𝑑 𝛼𝑘 = 0. ∎
Theorem 5: Let 𝑣 ∈ 𝑃𝑖,𝑗 for any 𝑖 ≠ 𝑗. Let 𝑈 be an open environment of 𝑣. Then, there is
𝑣 ′ ∈ 𝑈 such that 𝑣 ′ ∈ 𝑃1,2,3 ∕ 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 .
Proof:
As mentioned earlier, 𝑃1,2,3 is the image of the triangle 𝑇 = {0 ≤ 𝛼1 + 𝛼2 ≤ 1} under the
map:
−1
𝑓: 𝛼1 , 𝛼2 ↦ (∑ 𝛼𝑖 𝑀𝑖 )
𝑖
∑(𝛼𝑖 𝑀𝑖 𝑣𝑖∗ )
𝑖
As shown earlier, 𝑓 is continuous. 𝑓({𝛼1 , 𝛼2 }) = 𝑣 ⇒ 𝑣 = (∑𝑖 𝛼𝑖 𝑀𝑖 )−1 ∑𝑖(𝛼𝑖 𝑀𝑖 𝑣𝑖∗ )
where 𝛼3 = 1 − 𝛼1 − 𝛼2
Let 𝑣 ∈ 𝑃𝑖,𝑗 . Either 𝑣 is an intersection point between 𝐻𝑖,𝑗 and another hyperbola 𝐻𝑘,𝑖 , or
it is not.
First assume that 𝑣 is not an intersection point between 𝐻𝑖,𝑗 and any other hyperbola 𝐻𝑘,𝑖 .
Let 𝑈 be an open environment of 𝑣 that doesn’t intersect any hyperbola besides 𝑃1,2 . The
above lemma implies that for every 𝑣 ′ such that 𝑣 ′ ∈ 𝑃𝑖,𝑗 ∩ 𝑈 , 𝑓 −1 (𝑣 ′ ) ⊆ 𝑇 can’t
50
contain points for which 𝛼𝑖 + 𝛼𝑗 ≠ 1. Let 𝛼̃𝑖 , 𝛼̃𝑗 be such that 𝛼̃𝑖 𝑔𝑖 (𝑣) + 𝛼̃𝑗 𝑔𝑗 (𝑣) = 0.
Such 𝛼̃𝑖 , 𝛼̃𝑗 exist since 𝑣 ∈ 𝑃𝑖,𝑗 .
Since 𝑓 is continuous, the origin of 𝑈 is open in 𝑇. {𝛼̃𝑖 , 𝛼̃𝑗 } ∈ 𝑓 −1 (𝑈) ⇒ 𝑓 −1 (𝑈) is a
non-empty open environment of {𝛼̃𝑖 , 𝛼̃𝑗 } and hence must contain points from the interior
of the triangle 𝑇, i.e there are {𝛼𝑖′ , 𝛼𝑗′ } ∈ 𝑓 −1 (𝑈), 𝛼𝑖′ + 𝛼𝑗′ < 1 such that 𝑓({𝛼𝑖′ , 𝛼𝑗′ }) ∈ 𝑈.
𝑓({𝛼𝑖′ , 𝛼𝑗′ }) can’t be on 𝑃𝑖,𝑗 . Otherwise, as 𝑈 doesn’t intersect any other hyperbola, we
would have gotten by the lemma that 𝛼𝑘′ = 0 , or 𝛼𝑖′ + 𝛼𝑗′ = 1, in contradiction to the
assumption. So, 𝑓({𝛼1′ , 𝛼2′ }) is not on 𝑃𝑖,𝑗 but also not on any other hyperbola, as by
assumption 𝑈 does not intersect them. However, 𝑓({𝛼1′ , 𝛼2′ }) ∈ 𝑃1,2,3 . So, we get that
𝑓({𝛼1′ , 𝛼2′ }) ∈ 𝑃1,2,3 \𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1
If 𝑣 is an intersection point between 𝐻𝑖,𝑗 and any other hyperbola 𝐻𝑘,𝑖 , then since the
number of intersection points between the different hyperbolae is finite, there exists 𝑢 ∈
𝑈 ∩ 𝑃𝑖,𝑗 that is not an intersection point between 𝑃𝑖,𝑗 and any other hyperbola. Let 𝑉 ⊆ 𝑈
be an open environment of 𝑢, then by the above proof there exists 𝑣 ′ ∈ 𝑉 ⊆ 𝑈 such that
𝑣 ′ ∈ 𝑃1,2,3 ∕ (𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 ). This is the required 𝑣′∎
So we showed that the boundary of the 3-tasks Pareto front is exactly the 3 2-tasks Pareto
fronts, but they are not identical (i.e. it is not ‘empty’). Now we would like to better
characterize the 3-tasks Pareto front.
Examine ℜ2 ⁄⋃𝑖,𝑗 𝐻𝑖,𝑗 . It is divided into connected components, 𝑋𝑘 .
Theorem 6: Each component 𝑋𝑘 is either entirely Pareto optimal or not Pareto optimal at
all.
Proof: Let 𝑥𝑘 ∈ 𝑋𝑘 . By corollary 2, 𝑥𝑘 is Pareto optimal ⇔ 𝑓1,2 (𝑥𝑘 ) = 𝑓2,3 (𝑥𝑘 ) =
𝑓3,1 (𝑥𝑘 ). By lemma 1, 𝑓𝑖,𝑗 changes signs only on 𝐻𝑖,𝑗 , which means that the sign of each
𝑓𝑖,𝑗 is constant across each 𝑋𝑘 . Hence, if 𝑥𝑘 is Pareto optimal, 𝑋𝑘 is entirely Pareto
optimal, and if 𝑥𝑘 is not Pareto optimal, 𝑋𝑘 is entirely not Pareto optimal.
51
Theorem 7: If 𝑋𝑘 is unbounded it is not Pareto optimal
Proof: The Pareto front is compact as a continuous image of a compact set (the triangle
𝑇), and hence it is bounded.
Theorem 8: 2 adjacent connected components, 𝑋𝑘 and 𝑋𝑚 , cannot be both Pareto optimal.
Proof: Assume 𝑋𝑘 is Pareto optimal. It means that in this area, 𝑓1,2 = 𝑓2,3 = 𝑓3,1.
Assume that without loss of generality that 𝑋𝑘 and 𝑋𝑚 are separated by 𝐻1,2. It means
that 𝑓1,2 (and only 𝑓1,2 ) has a different sign on 𝑋𝑘 and on 𝑋𝑚 . Hence, 𝑓1,2 ≢ 𝑓2,3 = 𝑓3,1 on
𝑋𝑚 , so 𝑋𝑚 is not Pareto optimal.
Theorem 9: Let 𝑢 ∈ 𝑃𝑖,𝑗 . Then 𝑢 is at the boundary of a Pareto optimal region.
Proof: Each 𝑢 is at the boundary of 2 connected components 𝑋𝑘 . Theorem 5 shows that in
every open environment 𝑈 of 𝑢 there are Pareto optimal points that are not on 𝑃𝑖,𝑗 . This
implies that one of the connected components is entirely Pareto optimal. According to
theorem 8, the second one is necessarily not Pareto optimal. This implies that 𝑢 is at the
boundary of a Pareto optimal region.
Theorem 10: Let 𝑢 ∈ 𝐻𝑖,𝑗 ∕ 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 . Then the connected components on which
boundary 𝑢 is, are not Pareto optimal.
Proof: 𝑢 cannot be Pareto optimal. Since 𝑢 ∈ 𝐻𝑖,𝑗 ⁄𝑃𝑖,𝑗 , 𝑔𝑖 and 𝑔𝑗 point to the same
direction. 𝑔𝑘 (𝑘 ≠ 𝑖 ≠ 𝑗) must also point to the same direction (otherwise 𝑔𝑘 would point
to the opposite direction than 𝑔𝑖 and 𝑔𝑗 , implying that 𝑢 ∈ 𝑃𝑖,𝑘 , 𝑃𝑗,𝑘 in contradiction). So,
all three gradients are in the same half plane. As shown in Appendix S1, this means 𝑢 is
not Pareto optimal. Since the Pareto front is compact, it is also closed, and has an open
compliment. Hence, there is an environment U of 𝑢 which is not Pareto optimal. If 𝑢 is
on the boundary of a connected component 𝑋𝑘 , then 𝑈 ∩ 𝑋𝑘 ≠ Φ, meaning that 𝑋𝑘
contains points that are not Pareto optimal, and hence 𝑋𝑘 is not Pareto optimal.
52
We showed that 𝜕𝑃1,2,3 = 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1, if for every 𝑖 ≠ 𝑗 ≠ 𝑘 ∈ {1,2,3}, 𝐻𝑖,𝑗 ≠ 𝐻𝑖,𝑘 ,
yet this statement is true also if there are such 𝑖, 𝑗, 𝑘.
Assume that 𝐻𝑖,𝑗 = 𝐻𝑖,𝑘 . As shown, 𝐻𝑖,𝑗 = {𝑢|𝑓𝑖,𝑗 (𝑢) = 0 ⇔ 𝑔𝑖 (𝑢) × 𝑔𝑗 (𝑢) = 0}, and
𝐻𝑖,𝑘 = {𝑢|𝑔𝑖 (𝑢) × 𝑔𝑘 (𝑢) = 0}. It means that on 𝐻𝑖,𝑗 , 𝑔𝑖 is parallel to 𝑔𝑗 , and 𝑔𝑖 is
parallel to 𝑔𝑘 ⇒ 𝑔𝑗 is parallel to 𝑔𝑘 ⇒ 𝑔𝑗 × 𝑔𝑘 = 0 on 𝐻𝑖,𝑗 ⇒ 𝑓𝑗,𝑘 = 0 on 𝐻𝑖,𝑗 . As
explained earlier, this implies that 𝐻𝑗,𝑘 = 𝐻𝑖,𝑗 . 𝐻𝑖,𝑗 divides the space into 2 (if it’s a line)
or 3 (if it’s a hyperbola) parts. Each of 𝑓𝑖,𝑗 , 𝑓𝑖,𝑘 , 𝑓𝑗,𝑘 changes sign when passing any branch
of 𝐻𝑖,𝑗 . So, either they always have the same sign (expect on 𝐻𝑖,𝑗 itself), or they never
have the same sign. As seen before - a point outside of 𝐻𝑖,𝑗 is Pareto optimal if and only
if 𝑓𝑖,𝑗 , 𝑓𝑖,𝑘 and 𝑓𝑗,𝑘 all have the same sign. So either the entire space (maybe except parts
of 𝐻𝑖,𝑗 ) is Pareto optimal, or none of it is. However, we showed that the Pareto front is
compact, and hence bounded, and hence it cannot be the entire space. So, the Pareto front
is placed on 𝐻𝑖,𝑗 (which has no interior), i.e. - 𝑃1,2,3 = 𝜕𝑃1,2,3.
To show that 𝜕𝑃1,2,3 = 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 we need to show that 𝑃1,2,3 = 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 .
On one hand, 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 ⊆ 𝑃1,2,3. On the other hand, 𝑃1,2,3 ⊆ 𝐻𝑖,𝑗 , so if 𝑢 ∈ 𝑃1,2,3,
𝑢 ∈ 𝐻𝑖,𝑗 and then 𝑔1 (𝑢), 𝑔2 (𝑢), 𝑔3 (𝑢) are either all aligned, or one is pointing away from
the other two. The first case happens if and only if the point is not Pareto optimal, so for
𝑢 ∈ 𝑃1,2,3 the latter must happen. However, in that case 𝑢 ∈ 𝑃𝑚,𝑛 for 𝑚, 𝑛 ∈ {1,2,3} ⇒
𝑢 ∈ 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 ⇒ 𝑃1,2,3 ⊆ 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 ⇒ 𝑃1,2,3 = 𝑃1,2 ∪ 𝑃2,3 ∪ 𝑃3,1 .
53
Figure S4: For 3 tasks in 2D, the Pareto front is the locus of all points such that all 𝒇𝒊,𝒋 have
the same sign. Each of the 2 tasks Pareto fronts, 𝑷𝒊,𝒋 (in blue), lies on a hyperbola 𝑯𝒊,𝒋 . 𝒇𝒊,𝒋
switches sign when passing 𝑯𝒊,𝒋 . 𝑯𝟏,𝟐 , 𝑯𝟐,𝟑 and 𝑯𝟑,𝟏 are plotted in green, gray and pink,
respectively. The Pareto front associated with the three tasks, 𝑷𝟏,𝟐,𝟑 is plotted in light blue.
54
Appendix S8
The resulting Pareto front when one of the performance function is maximized in a
region
Consider again the case of 3 tasks in 𝑛 dimensions, each with a point archetype 𝑎𝑖 , and a
performance function 𝑃̃𝑖 that decays with an inner-product norm from the archetype.
Denote by 𝑇 the resulting Pareto front. Now consider the case where 𝑃̃1 is truncated –
instead of a point archetype there is a region, 𝐴1 , that maximizes performance. Denote
the truncated performance function by 𝑃1 . Since 𝑃1 is truncated, it means that outside the
archetypal region, its contours are identical to those of 𝑃̃1. For convenience - denote
𝑃̃2 , 𝑃̃3 by 𝑃2 , 𝑃3 .
We would now like to calculate the Pareto front relative to 𝑃1 , 𝑃2 , 𝑃3 .
Theorem: The Pareto front relative to 𝑃1 , 𝑃2 , 𝑃3 is composed of 𝑃2,3 ∪ (𝑇⁄𝐴1° ), where 𝑃2,3
is the Pareto front related to 𝑃2 and 𝑃3 .
Proof:
Lemma: If 𝑥 ∉ 𝑇, it is not Pareto optimal.
Proof: 𝑥 ∉ 𝑇. In Appendix S1 we saw that this means that there is 𝑦 in the vicinity
of 𝑥 such that ∀𝑖: 𝑃̃𝑖 (𝑥) < 𝑃̃𝑖 (𝑦). This implies that 𝑃2 (𝑥) < 𝑃2 (𝑦), 𝑃3 (𝑥) <
𝑃3 (𝑦). When instead of considering 𝑃̃1 we consider 𝑃1 , it is possible that instead
of performing task 1 better than 𝑥, 𝑦 performs task 1 the same as 𝑥 (This happens
if both 𝑥 and 𝑦 are on 𝐴1 ). Hence, 𝑥 is not Pareto optimal also relative to 𝑃1 , 𝑃2
and 𝑃3 .
Lemma: If 𝑥 ∈ 𝑇 and 𝑥 ∉ 𝐴1° , then 𝑥 is Pareto optimal.
Proof: Let 𝑥 ∈ 𝑇, 𝑥 ∉ 𝐴1° . If there was a point 𝑦 that dominated 𝑥, it would mean
that 𝑃𝑖 (𝑥) ≤ 𝑃𝑖 (𝑦), with at least one proper inequality. 𝑃2 (𝑥) ≤ 𝑃2 (𝑦) or 𝑃3 (𝑥) ≤
55
𝑃3 (𝑦) ⇒ 𝑃̃2 (𝑥) ≤ 𝑃̃2 (𝑦) or 𝑃̃3 (𝑥) ≤ 𝑃̃3 (𝑦). If 𝑃1 (𝑥) < 𝑃1 (𝑦), it means that 𝑥 ∉
𝐴1 and certainly 𝑃̃1 (𝑥) < 𝑃̃1 (𝑦). For ∈ 𝜕𝐴1 𝑃1 (𝑥) = 𝑃1 (𝑦) ⇒ 𝑃̃1 (𝑥) ≤ 𝑃̃1 (𝑦),
and for 𝑥 ∈ 𝐴1 𝑃1 (𝑥) = 𝑃1 (𝑦) ⇒ 𝑃̃1 (𝑥) = 𝑃̃1 (𝑦). So, for 𝑥 ∉ 𝐴1° , 𝑃1 (𝑥) =
𝑃1 (𝑦) ⇒ 𝑃̃1 (𝑥) ≤ 𝑃̃1 (𝑦). Thus, 𝑃𝑖 (𝑥) ≤ 𝑃𝑖 (𝑦) ⇒ 𝑃̃𝑖 (𝑥) ≤ 𝑃̃𝑖 (𝑦), and 𝑃𝑖 (𝑥) <
(𝑦) ⇒ 𝑃̃𝑖 (𝑥) < (𝑦), so if 𝑥 is not Pareto optimal relative to {𝑃𝑖 } it is not Pareto
optimal relative to {𝑃̃𝑖 }. Since 𝑥 ∈ 𝑇, it is Pareto optimal relative to {𝑃̃𝑖 }, and
hence it is Pareto optimal relative to {𝑃𝑖 }.
Lemma: If 𝑥 ∈ 𝑇 ∩ 𝐴1° , then it is either on 𝑃2,3 or it is not Pareto optimal.
Proof: Let 𝑥 ∈ 𝑇 ∩ 𝐴10 . Assume 𝑥 is not on 𝑃2,3 . We would like to show that in
this case, 𝑥 is not Pareto optimal. There is 𝜖1 > 0 such that ̅̅̅̅̅̅̅̅̅̅̅
𝐵0 (𝑥, 𝜖1 ) ⊆ 𝐴1 , since
𝑥 ∈ 𝐴1° . There is 𝜖2 > 0 such that ̅̅̅̅̅̅̅̅̅̅̅
𝐵0 (𝑥, 𝜖2 ) does not intersect 𝑃2,3 since 𝑥 is not
on that front (It was shown in Appendix S7 that the Pareto front is closed. The
argument brought there applies to any number of dimensions). Let 𝜖 =
min(𝜖1 , 𝜖2 ). ̅̅̅̅̅̅̅̅̅̅
𝐵0 (𝑥, 𝜖) ⊆ 𝐴1 and does not intersect 𝑃2,3 . 𝑥 is not Pareto optimal
relative to 𝑃2 and 𝑃3 since it is not on 𝑃2,3 . We saw in Appendix S1 that if x is not
Pareto optimal (when the performance functions decay we a norm from a point
archetype), there is a direction such that points in this direction close enough to
the point dominate it. This means that there is 𝑦 ∈ ̅̅̅̅̅̅̅̅̅̅
𝐵0 (𝑥, 𝜖) that performs tasks 2
̅̅̅̅̅̅̅̅̅̅
and 3 better than 𝑥 does. 𝑦 ∈ 𝐵
0 (𝑥, 𝜖) ⊆ 𝐴1 ⇒ 𝑦 ∈ 𝐴1 ⇒ 𝑦 performs task 1 the
same as 𝑥 does since they are both on the archetype of task 1 ⇒ 𝑥 is dominated by
𝑦 ⇒ 𝑥 is not Pareto optimal.
Lemma: If 𝑥 ∈ 𝑃2,3 , then 𝑥 is pareto optimal (even if it is on 𝐴1 )
Proof: If 𝑥 ∈ 𝑃2,3 it means that no other point performs both task 2 and task 3
better than it, which in turn means that no other point performs all 3 tasks better
than it, without regard to performance 1. Hence, 𝑥 is Pareto optimal.
56
When considering the case of performance functions that decay with Euclidean norm, we
get a circular shaped archetypal region, and a resulting Pareto front as depicted in Fig. 12
in the main text.
For the special case where 𝑎2 = 𝑎3 , 𝑃2 = 𝑃3 , we effectively get the case of 2 tasks, one
maximized in a region and one at a single point. Such a case, where 𝑃1 and 𝑃2 /𝑃3 decay
with different inner product norms, is depicted in Fig. 11 in the main text.
57
Appendix S9
Bounds on the Pareto front for general performance functions show that normally
it is located in a region close to the archetype
We would like to find conditions as general as possible under which the Pareto front will
be constrained to an area close to the line between the archetypes. We consider the case
of more general performance functions, and of archetypes that are regions instead of
points.
We start with the case of 2 point-like archetypes: 𝑎1 and 𝑎2 . Denote by 𝐶21 the contour of
the first performance function, 𝑃1 , on which lies 𝑎2 . Define 𝐵21 as the set of points in
which performance 1 is greater or equal to its value on the contour (i.e. 𝐵21 = {𝑥|𝑃1 (𝑥) ≥
𝑃1 (𝑎2 )}). In the same manner, denote by 𝐶12 the contour of the second performance
function, 𝑃2 , on which lies 𝑎1 , and 𝐵12 = {𝑥|𝑃2 (𝑥) ≥ 𝑃2 (𝑎1 )}.
Claim: Under these conditions, the Pareto front is bounded in 𝐵21 ∩ 𝐵12.
Proof: Let 𝑧 ∉ 𝐵21 ∩ 𝐵12. There are 3 options: 𝑧 ∈ 𝐵21⁄𝐵12 , 𝑧 ∈ 𝐵12⁄𝐵21 , 𝑧 ∉ 𝐵12 ∪ 𝐵21 .
If 𝑧 ∈ 𝐵21⁄𝐵12 , it is dominated by 𝑎1 as 𝑃2 (𝑧) < 𝑃2 (𝑎1 ) since 𝑎2 ∈ 𝐵12 and 𝑃1 (𝑧) <
𝑃1 (𝑎1 ) since 𝑎1 is the archetype of task 1 so it maximizes the performance of that task.
The same argument shows that if 𝑧 ∈ 𝐵12⁄𝐵21 , then 𝑧 is dominated by 𝑎2 . If 𝑧 ∉ 𝐵12 ∪ 𝐵21 ,
it is dominated by any point in 𝐵12 ∪ 𝐵21. Hence, the Pareto front is restricted to the area
𝐵12 ∩ 𝐵21.
In this area the Pareto front does not have to be connected. Such scenario can arise when
the performance functions are not monotonic, or do not depend monotonically on strictly
concave functions (See Fig S5).
58
Consider now the case of 𝑘 point-like archetypes. Denote by 𝐶𝑗𝑖 the contour of the 𝑖 𝑡ℎ
performance function, 𝑃𝑖 , on which 𝑎𝑗 lies. Denote by 𝐵𝑗𝑖 the set of points in which
performance 𝑖 is greater or equal to its value on the contour (𝐵𝑗𝑖 = {𝑥|𝑃𝑖 (𝑥) ≥ 𝑃𝑖 (𝑎𝑗 )}).
For each 𝑗, the Pareto front must lie in ⋃𝑘𝑖=1, 𝐵𝑗𝑖 , since each point outside this set is
𝑖≠𝑗
dominated by 𝑎𝑗 . If 𝑥 ∉ ⋃𝑘𝑖=1, 𝐵𝑗𝑖 ⇒ ∀𝑖 ≠ 𝑗: 𝑥 ∉ 𝐵𝑗𝑖 ⇒ 𝑥 performs task 𝑖 for 𝑖 ≠ 𝑗 worse
𝑖≠𝑗
than any phenotype in 𝐵𝑗𝑖 . As ∀𝑖: 𝑎𝑗 ∈ 𝐵𝑗𝑖 , 𝑥 performs task 𝑖 worse than 𝑎𝑗 . 𝑥 performs
task 𝑗 worse than 𝑎𝑗 . Since 𝑎𝑗 is the archetype of task 𝑗, 𝑥 performs task 𝑗 worse than 𝑎𝑗
⇒ 𝑥 performs all tasks worse than 𝑎𝑗 ⇒ 𝑥 is not Pareto optimal.
Conclusion: 𝑥 ∈ Pareto front ⇒ 𝑥 ∈ ⋃𝑘𝑖=1, 𝐵𝑗𝑖 for every 𝑗.
𝑖≠𝑗
⇒Pareto front ⊆ ⋂𝑘𝑗=1 ⋃𝑘𝑖=1, 𝐵𝑗𝑖
𝑖≠𝑗
Consider again the case of 2 archetypes. Assume now that instead of a point, one of the
archetypes is a region. We would like to find a bound to the Pareto front in this scenario.
We assume the first archetype 𝐴1 is a closed bounded region. Let 𝑥1,2 be the point on 𝐴1
with the best performance of task 2. Since 𝐴1 is compact and 𝑃2 is continuous, such points
exist. As before, let 𝐵21 be the set of points outperforming 𝑎2 in task 1, 𝐵21 = {𝑥|𝑃1 (𝑥) ≥
𝑃1 (𝑎2 )}. Let 𝐵12 be the set of points outperforming 𝑥1,2 in task 2, 𝐵12 = {𝑥|𝑃2 (𝑥) ≥
𝑃2 (𝑥1,2 )}. Take a point 𝑧 outside of 𝐵21 ∩ 𝐵12. Again there are 3 options: 𝑧 ∈ 𝐵12⁄𝐵21 , 𝑧 ∈
𝐵21⁄𝐵12 , 𝑧 ∉ 𝐵21 ∪ 𝐵12. If 𝑧 ∈ 𝐵12⁄𝐵21 , then 𝑃1 (𝑧) < 𝑃1 (𝑎2 ) since 𝑎2 ∈ 𝐶21 and 𝑧 ∉ 𝐶21 , and
𝑃2 (𝑧) < 𝑃2 (𝑎2 ) since 𝑎2 is the archetype of task 2 so it maximizes the performance of
that task. It means that 𝑧 is dominated by 𝑎2 , and hence it is not Pareto optimal. If 𝑧 ∈
𝐵21⁄𝐵12 , then 𝑃2 (𝑧) < 𝑃2 (𝑥1,2 ) since 𝑥1,2 ∈ 𝐵12 and 𝑧 ∉ 𝐵12 , and 𝑃1 (𝑧) ≤ 𝑃1 (𝑥1,2 ) since
𝑥1,2 is on 𝐴1 , the archetype of task 1 so it maximizes the performance of that task.
Therefore, 𝑧 is dominated by 𝑥12 and is not Pareto optimal. If 𝑧 ∉ 𝐵21 ∪ 𝐵12, it is
59
dominated by any point in 𝐵21 ∪ 𝐵12. Hence, the Pareto front is restricted to the area 𝐵21 ∩
𝐵12 in this case as well.
We further ask what happens in the case where there are 3 archetypes – the first
archetype, 𝐴1 is a region, and the 2 other are points - 𝑎2 , 𝑎3 . Let 𝑥1,2 and 𝑥1,3 be the point
3
2
on 𝐴1 with the best performance of task 2 and 3, respectively. Let 𝐵1,2
, 𝐵1,2
be the set of
3
2
points that outperform 𝑥1,2 in task 2 and 3, respectively. Let 𝐵1,3
, 𝐵1,3
be the set of points
𝑗
that outperform 𝑥1,3 in task 2 and 3, respectively. By definition - ∀𝑥 ∈ 𝐵1,𝑖 , 𝑧 ∉
𝑗
𝐵1,𝑖 : 𝑃𝑗 (𝑧) < 𝑃𝑗 (𝑥).
3
2
In that case, the Pareto front must be contained in 𝐵1,2
∪ 𝐵1,2
: Any point outside of this
set is dominated by 𝑥1,2 , since 𝑥1,2 is contained in both contours, it performs tasks 2 and 3
better than any point outside of those contours, and task 1 better than any other point
3
2
since it is on 𝐴1 . The same argument applies to 𝐵1,3
∪ 𝐵1,3
. From the same arguments
brought earlier, the front is contained in 𝐵21 ∪ 𝐵23 and in 𝐵31 ∪ 𝐵32. Hence, the front is
3
3
2
2
bounded in (𝐵1,2
∪ 𝐵1,2
) ∩ (𝐵1,3
∪ 𝐵1,3
) ∩ (𝐵21 ∪ 𝐵23 ) ∩ (𝐵31 ∪ 𝐵32 )
𝑖
𝑘
If all 3 archetypes are regions, each term can be replaced by (𝐵𝑗𝑖 ∪ 𝐵𝑗𝑘 ) → (𝐵𝑗,𝑖
∪ 𝐵𝑗,𝑖
)∩
𝑖
𝑘
𝑖
𝑘
(𝐵𝑗,𝑘
∪ 𝐵𝑗,𝑘
), resulting in the Pareto front bounded by ⋂3𝑗=1 ⋃3𝑖≠𝑘≠𝑗,𝑖,𝑘=1(𝐵𝑗,𝑖
∪ 𝐵𝑗,𝑖
)∩
𝑖
𝑘
(𝐵𝑗,𝑘
∪ 𝐵𝑗,𝑘
)
𝑖
𝑘
Conclusion: The Pareto Front ⊆ ⋂3𝑗=1 (𝐵𝑗,𝑖
∪ 𝐵𝑗,𝑖
)
𝑖≠𝑗≠𝑘
60
Figure S5: The Pareto front does not have to be connected for non monotonic
performance functions. A and B: A plot of 2 chosen non-monotonic performance
functions,
5.2𝑒
−(𝑥2 +𝑦2 )
0.1
+ 4.9𝑒
−((𝑥−1)2 +𝑦2 )2
.5
+ 5𝑒
−((𝑥)2 +(𝑦−1)2 )2
.5
−((𝑥)2 +(𝑦+1)2 )2
.5
+
−((𝑥−1)2 +(𝑦−1−1)2 )2
.5
+
+ 5.1𝑒
−((𝑥+1)2 +𝑦2 )2
.5
and
2𝑒
𝑃1 = 4.1𝑒
𝑃2 = 4.1𝑒
−((𝑥+1−1)2 +(𝑦−1)2 )2
.5
+ 5.1𝑒
−((𝑥−1)2 +(𝑦−1)2 )
0.1
+ 4.9𝑒
−((𝑥−1)2 +(𝑦+1−1)2 )2
.5
−((𝑥−1−1)2 +(𝑦−1)2 )2
.5
+ 3𝑒
−((𝑥−1.9)2 +(𝑦+1.3)2 )2
.2
+ 5𝑒
.
C: The Pareto front related to those performance functions is not connected. 𝐶21 - the
contour of performance function 1 going through 𝑎2 , the archetype of task 2, is in thick
61
purple. 𝐶12 - the contour of performance function 2 going through 𝑎1 , the archetype of
task 1, is in thin blue. 𝑎1 and 𝑎2 are red dots. The Pareto front is plotted in red. It can be
seen that it is not connected.
62
Appendix S10
The Pareto front of r strongly concave performance functions is a connected set of
Hausdorff dimension of at most r-1.
We would like to calculate the Pareto front of a system that needs to perform r tasks in an
n-dimensional trait space V = ℛ 𝑛 . Each performance function 𝑃𝑖 (𝑣) has a single
maximum - the archetype 𝑣𝑖∗ . 𝑃𝑖 is assumed to be smooth and strongly concave.
In Appendix S1 we’ve shown that for such a system, for a Pareto optimal point v there
𝑟
⃑ 𝑃𝑖 (𝑣)} that equals zero.
exists a convex linear combination of {∇
𝑖=1
For performance functions 𝑃𝑖 (𝑣) that decay with inner product norms, we’ve shown that
𝑟
⃑ 𝑃𝑖 (𝑣)}
if there exists a convex linear combination of {∇
that equals zero, v is Pareto
𝑖=1
optimal.
This remains true for strongly concave performance functions:
Lemma 1: For strongly concave {𝑃𝑖 }, if there exists a convex linear combination of
𝑟
⃑ 𝑃𝑖 (𝑣)} that equals zero, then v is Pareto optimal
{∇
𝑖=1
Proof: By assumption, there exist {𝛼𝑖 ≥ 0}𝑟𝑖=1 , ∑𝑟𝑖=1 𝛼𝑖 = 1 such that ∑𝑟𝑖=1 𝛼𝑖 ⃑∇ 𝑃𝑖 (𝑣) =
0.
63
Consider the function 𝑓 = ∑𝑟𝑖=1 𝛼𝑖 𝑃𝑖 . Since all 𝑃𝑖 ’s are strongly concave, all 𝛼𝑖 ’s are
positive and are not all zero, f is strictly concave. By our assumption ⃑∇𝑓(𝑣) =
∑𝑟𝑖=1 𝛼𝑖 ⃑∇ 𝑃𝑖 = 0, and together those imply that v maximizes f. Since f is monotonic with
all 𝑃𝑖 ’s, this implies v is Pareto optimal.
Hence, v is Pareto optimal iff there is a convex combination of ⃑∇ 𝑃𝑖 (𝑣) that equals zero.
𝑟
In addition, for each convex set {𝛼𝑖 }𝑖=1 , there exists a v such that ∑𝑟𝑖=1 𝛼𝑖 ⃑∇ 𝑃𝑖 (𝑣) = 0.
This is because each of the 𝑃𝑖 is strongly concave on ℛ 𝑛 , and hence decays to negative
infinity. This implies that ∑𝑟𝑖=1 𝛼𝑖 𝑃𝑖 decays to negative infinity, so it must attain a
maximum. This maximum point v will satisfy ∑𝑟𝑖=1 𝛼𝑖 ⃑∇ 𝑃𝑖 (𝑣) = 0. Also, from strict
concavity, there will be only a single point v that satisfies this relation.
𝑟
To conclude, we found that for every convex set {𝛼𝑖 }𝑖=1 there is a single point v such that
∑𝑟𝑖=1 𝛼𝑖 ⃑∇ 𝑃𝑖 (𝑣) = 0, v is Pareto optimal, and those are all Pareto optimal points.
Hence, the set {𝛼1 , … 𝛼𝑟 |𝛼𝑖 ≥ 0, ∑𝑟𝑖=1 𝛼𝑖 = 1} fully determines the Pareto front.
Denote by T := {𝛼1 , … 𝛼𝑟 |𝛼𝑖 ≥ 0, ∑𝑟𝑖=1 𝛼𝑖 = 1} the unit (r-1)-simplex. 𝑇 ⊂ ℛ 𝑟−1. By the
above considerations, we can define a function h:T→ ℛ 𝑛 by assigning each {𝛼1 , … 𝛼𝑟 }
with the maximal point of ∑𝑟𝑖=1 𝛼𝑖 𝑃𝑖 . By the above results, we know that Im(T) equals
the Pareto front.
Lemma 2: h is continuously differentiable
64
Proof:
Take 𝛼 ≔ {𝛼1 , … , 𝛼𝑟 } ∈ 𝑇 ⊂ ℛ 𝑟−1 . Take 𝑣 = ℎ(𝛼) ∈ ℛ 𝑛 .
⃑ 𝑃𝑖 (𝑦). k is continuously differentiable.
𝑘(𝛼, 𝑣) = 0 , where 𝑘(𝑥, 𝑦) ≔ ∑𝑟𝑖=1 𝑥𝑖 ∇
Denote 𝑘 = {𝑘1 , … , 𝑘𝑛 }
𝜕𝑘1
𝜕𝑦1
Then
⋮
𝜕𝑘1
(𝜕𝑦𝑛
⋯
⋱
⋯
𝜕𝑘1
𝜕𝑦𝑛
⋮
𝜕𝑘𝑛
= ∑𝑟𝑖=1 𝛼𝑖 ∇2 𝑃𝑖 .
𝜕𝑦𝑛 )
Since 𝑃𝑖 is strongly convex, ∇2 𝑃𝑖 is positive definite for every i, and hence ∑𝑟𝑖=1 𝛼𝑖 ∇2 𝑃𝑖
is positive definite, and hence not singular.
According to the implicit function theorem, this implies that there exists an open
environment U of 𝛼 (U itself is not necessarily contained in T) , an open environment V
of v, and a unique continuously differentiable function 𝑔: 𝑈 → 𝑉 such that ∀𝑥 ∈ 𝑈:
𝑘(𝑥, 𝑔(𝑥)) = 0.
However, we know that ∀𝛼 ′ ∈ 𝑇: ∃ a single v’ such that 𝑘(𝛼 ′ , 𝑣) = 0. This implies that
ℎ|𝑈∩𝑇 = 𝑔| 𝑇 ⇒ ℎ is continuously differentiable at 𝛼.
This is true for every 𝛼 ∈ 𝑇, and hence h is continuously differentiable on T.
Corollary: For strongly concave and smooth performance functions, the Pareto front is
connected.
65
Proof: We saw that the Pareto front is the image of T under h. T is connected (as the unit
(r-1)-simplex in ℛ 𝑟 ) and h is continuous, and hence the Pareto front is connected.
Corollary: The Pareto front has Hausdorff dimension of at most r-1
Proof: This follows as T has Hausdorff dimension of r-1 (as the unit (r-1)-simplex) and h
is 𝐶 1 .
∎
Note that v is Pareto optimal relative to 𝑃1 , … , 𝑃𝑟 ⇔ ∄𝑣 ′ ≠ 𝑣 𝑠. 𝑡 ∀𝑖: 𝑃𝑖 (𝑣) < 𝑃𝑖 (𝑣 ′ ) ⇔
∄𝑣 ′ ≠ 𝑣 𝑠. 𝑡 ∀𝑖: 𝑓(𝑃𝑖 (𝑣)) < 𝑓(𝑃𝑖 (𝑣′)) where 𝑓: ℛ → ℛ is a monotonic increasing
function ⇔ v is Pareto optimal relative to 𝑓 ∘ 𝑃1 , … , 𝑓 ∘ 𝑃𝑟
Corollary: The Pareto front relative to 𝑃1 , … , 𝑃𝑟 , where each 𝑃𝑖 is a smooth monotonically
increasing function of a strongly concave function is continuous and has a maximal
Hausdorff dimension of r-1.
66
References
1. Grant PR, Abbott I, Schluter D, Curry RL, Abbott LK (1985) Variation in the size
and shape of Darwin’s finches. Biological Journal of the Linnean Society 25:1-39.
2. Barber CB, Dobkin DP, Huhdanpaa H (1996) The quickhull algorithm for convex
hulls. ACM Trans Math Softw 22:469–483.
3. Klee V, Laskowski MC (1985) Finding the smallest triangles containing a given
convex polygon. Journal of Algorithms 6:359-375.
4. M. Gerstenhaber (1951) Theory of convex polyhedral cones, Chap. XVIII of Cowles
Commission Monograph No. 13, Activity analysis of production and allocation, ed. T. C.
Koopmans, Wiley, New York,.
67