MBW and MBXW
advertisement

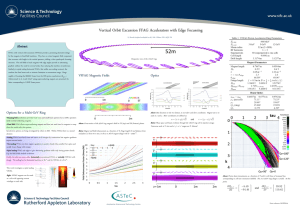
LHC Project Note XXX 2009-11-30 Per.Hagen@cern.ch Magnetic model of the normal-conducting magnets MBW, MBXW(H) and MCBW(H/V) P. Hagen for the FiDeL team CERN, Technology Department Keywords: Normal-conducting Magnets, Magnetic Field Model, Harmonics, LHC. 1. Introduction Function in the machine: The resistive MBXW magnets (optical function D1) are used in combination with the MBRC magnet (D2) to reduce the beam separation from 194 mm in the arcs to 0 mm around the high luminosity experiments ATLAS (IP1) and CMS (IP5). One MBXW magnet is used in the orbit bump around the LHC-b muon spectrometer (IP8). The MBW magnets (optical functions D3 and D4) are used in the cleaning regions, IR3 and IR7, to increase the beam separation from 194 mm in the arcs to 224 mm. The MCBW H/V magnets are used in the cleaning regions for orbit correction (horizontal / vertical). Each corrector acts on one beam. The “V” type is just a tilted “H” corrector [1]. Normalconducting magnets are needed in these places to avoid the issue of particle showers from the IP or collimators inducing quench. See Appendix A for optics calculations. The magnetic length is 3.4 m for MBW and MBXW, 1.7 m for MCBW, and the nominal field is 1.3-1.4 T (see Table I), for a nominal current of about 700 A. Fig. 1: MBXW cross-section. This is an internal CERN publication and does not necessarily reflect the views of the LHC project management. Fig. 2: MBW cross-section. Table I: Main parameters of MBW, MBXW and MCBW based upon measurements, design values within () if different Magnet type Magnetic length Beam separation Aperture (gap height) Operating temperature Nominal field Nominal current Resistance Inductance Power dissipation at Inom (m) (mm) (mm) (C) (T) (A) (mohm) (mH) (kW) MBW 3.4 194-224 52 < 65 1.44 (1.42) 720 52 (55) 178 (180) 27 (29) MBXW MCBW 3.43 (3.4) 1.73 (1.7) 0-27 224 63 52 < 65 < 65 1.38 (1.28) 1.0 (1.1) 750 (690) 500 (550) 58 (60) 48 (60) 144 (145) 42 (50) 33 (29) 10 (14) Numbers and variants: The MBXW and MBW have similar “H” design and are made from the same materials by BINP (Novosibirsk, Russia). The MBXW has a common bore for the 2 beams, whilst the MBW has two bores. The field direction is vertical (“up” or “down”) for both beams. The MCBW has a single bore and the field is vertical for H and horizontal for V. Several magnets are connected in series to achieve the needed integrated bending strength. They operate as one optical element: 6 MBXW in series operate as D1, and 2 or 3 MBW magnets in series operate as either D3 or D4. The MCBW act alone with a dedicated power supply. The number of MBXW in LHC is “2 IP × 2 sides of IP × 6 magnets + 1 for IP8 = 25 magnets”. 25 + 4 spare magnets were produced. The number of MBW for IR3 is “2 sides × 2 optical functions × 3 magnets = 12 magnets” and for IR7 is “2 sides × 2 optical functions × 2 magnets = 8 magnets”. This gives 20 MBW used in LHC. 20 + 4 spares were produced. There are 20 MCBW correctors. 16 are used in the cleaning sections: “2 IP × 2 sides of IP × 2 beams × (1 H + 1 V)”. MCBWH.5L8.B1 has replaced a faulty superconducting orbit corrector. So there are 3 spares. -2- Naming convention: The MBW and MBXW magnets are identified by consecutive production numbers 1 to n. The MTF naming schemes are respectively HCMBW__001-BI0000nn, HCMBXW_001-BI0000nn and HCMCBW_001-BI0000nn. BI is the manufacturer code for BINP. Expected operational cycles, range of current: The operational current range (proton energy range 450 GeV to 7 TeV) for MBW is around 41-643 A, corresponding to the field range 0.08-1.3 T. The operational current range for MBXW is 43-685 A, corresponding to the field range 0.08-1.3 T. The optical strength scales linearly with the particle momentum during ramp (true for all magnets). The field does not change once collision energy has been reached. That is, the optical functions remain constant during the LHC squeeze. These numbers are based upon LHC optics V6.503 released in 2008. The MCBW correctors do not have any predefined optical strength. The operational currents and fields are given in Tables II-V for the circuits. The FiDeL model parameters were revised slightly in 2009 so we show original values from 2008 and the ones from 2009, as well as the difference between them (units) in Tables VI-VII. Table II: Operational currents and fields for MBW circuits based upon FiDeL 2008. CIRCUIT RD34.LR3 RD34.LR7 E = 450 GeV I (A) B (T) 40.97 0.08 40.97 0.08 E = 3.5 TeV I (A) B (T) 318.68 0.65 318.68 0.65 E = 5 TeV I (A) B (T) 455.34 0.93 455.34 0.93 E = 6 TeV I (A) B (T) 547.13 1.11 547.13 1.11 E = 7 TeV I (A) B (T) 642.65 1.30 642.65 1.30 Table III: Operational currents and fields for MBXW circuits based upon FiDeL 2008. CIRCUIT RD1.LR1 RD1.LR5 E = 450 GeV I (A) B (T) 43.17 0.08 43.17 0.08 E = 3.5 TeV I (A) B (T) 335.76 0.65 335.76 0.65 E = 5 TeV I (A) B (T) 479.80 0.92 479.80 0.92 E = 6 TeV I (A) B (T) 577.47 1.11 577.47 1.11 E = 7 TeV I (A) B (T) 685.21 1.29 685.21 1.29 Table IV: Operational currents and fields for MBW circuits based upon FiDeL 2009. CIRCUIT RD34.LR3 RD34.LR7 E = 450 GeV I (A) B (T) 40.93 0.08 40.93 0.08 E = 3.5 TeV I (A) B (T) 318.32 0.65 318.35 0.65 E = 5 TeV I (A) B (T) 454.85 0.93 454.90 0.93 E = 6 TeV I (A) B (T) 546.63 1.11 546.68 1.11 E = 7 TeV I (A) B (T) 642.39 1.30 642.45 1.30 Table V: Operational currents and fields for MBXW circuits based upon FiDeL 2009. CIRCUIT RD1.LR1 RD1.LR5 E = 450 GeV I (A) B (T) 43.12 0.08 43.10 0.08 E = 3.5 TeV I (A) B (T) 335.34 0.65 335.22 0.65 E = 5 TeV I (A) B (T) 479.24 0.92 479.06 0.92 E = 6 TeV I (A) B (T) 576.97 1.11 576.74 1.11 E = 7 TeV I (A) B (T) 684.99 1.29 684.66 1.29 Table VI: Difference between operational currents and fields for MBW: FiDeL 2009 minus 2008 (units). CIRCUIT RD34.LR3 RD34.LR7 E = 450 GeV I (units) B (units) -11 0 -10 0 E = 3.5 TeV I (units) B (units) -11 0 -10 0 E = 5 TeV I (units) B (units) -11 0 -10 0 E = 6 TeV I (units) B (units) -9 0 -8 0 E = 7 TeV I (units) B (units) -4 0 -3 0 Table VII: Difference between operational currents and fields MBXW: FiDeL 2009 minus 2008 (units). CIRCUIT RD1.LR1 RD1.LR5 E = 450 GeV I (units) B (units) -13 0 -16 0 E = 3.5 TeV I (units) B (units) -12 0 -16 0 E = 5 TeV I (units) B (units) -12 0 -15 0 -3- E = 6 TeV I (units) B (units) -9 0 -13 0 E = 7 TeV I (units) B (units) -3 0 -8 0 Summary of manufacturing parameters: the main parameters of the MBW, MBXW and MCBW are shown in Table I. 2. Layout Slots and positions: the 20 MBW are located in IR3 and IR7 according to Table VIII. The 24 MBXW are located in IR1 and IR5 according to Table IX. These tables are based upon the installation in 2008. The field measurements have been done from the CS (connection side) to the NCS (non connection side), as usual. Half of the MBW magnets have been vertically -rotated in the tunnel w. r. t. this orientation. The reason for the rotation is to better shield the power cables from radiation coming from the collimators. The transformation of harmonics when doing a vertical rotation is described in the Appendix of Ref. [2]. For the normal MBW dipoles the equations becomes: 𝑏 ′ n = (−1)n−1 𝑏n 𝑎′ n = (−1)n−2 𝑎n These equations are valid for both apertures as they have a common reference system. Care must be taken when using the data in MAD as there are several definitions of the coordinate system for beam 2 [3]. Circuits: The two apertures in the MBW magnet are connected in series. All MBW magnets in the optical functions D3 and D4 are connected in series, both sides of the “IP”. This minimises the number of power converters by taking into account that the integrated field strength is the same (full symmetry). Similarly all MBXW on both sides of the IP are in series. This gives a total of 2 circuits for D1 (MBXW) and 2 for D3 + D4. See Tables VIII and IX. Table VIII: MBW slot allocation, optical function, nominal beam separation, position (s) in beam 1 direction and vertical rotation. SLOT FUNCTION BEAM SEP S MAGNET V ROTATED MBW.F6L3 D4.L3 194.0 6473.2548 HCMBW__001-BI000004 MBW.E6L3 195.4 6477.4898 HCMBW__001-BI000012 MBW.D6L3 198.8 6481.7248 HCMBW__001-BI000016 MBW.C6L3 D3.L3 219.2 6499.7478 HCMBW__001-BI000005 Yes MBW.B6L3 222.6 6503.9828 HCMBW__001-BI000017 Yes MBW.A6L3 224.0 6508.2178 HCMBW__001-BI000019 Yes MBW.A6R3 D3.R3 224.0 6821.0718 HCMBW__001-BI000020 MBW.B6R3 222.6 6825.3068 HCMBW__001-BI000014 MBW.C6R3 219.2 6829.5418 HCMBW__001-BI000018 MBW.D6R3 D4.R3 198.4 6847.5648 HCMBW__001-BI000021 Yes MBW.E6R3 195.4 6851.7998 HCMBW__001-BI000013 Yes MBW.F6R3 194.0 6856.0348 HCMBW__001-BI000001 Yes MBW.D6L7 D4.L7 194.1 19779.7494 HCMBW__001-BI000008 MBW.C6L7 195.7 19783.9844 HCMBW__001-BI000010 MBW.B6L7 D3.L7 221.4 19819.1389 HCMBW__001-BI000007 Yes MBW.A6L7 224.0 19824.0739 HCMBW__001-BI000011 Yes MBW.A6R7 D3.R7 224.0 20164.2509 HCMBW__001-BI000002 MBW.B6R7 222.1 20169.1859 HCMBW__001-BI000006 MBW.C6R7 D4.R7 195.7 20204.3404 HCMBW__001-BI000003 Yes MBW.D6R7 194.1 20208.5754 HCMBW__001-BI000009 Yes -4- Table IX: MBXW slot allocation, optical function, nominal beam separation, position (s) in beam 1 direction and vertical rotation SLOT MBXW.A4R1 MBXW.B4R1 MBXW.C4R1 MBXW.D4R1 MBXW.E4R1 MBXW.F4R1 MBXW.F4L5 MBXW.E4L5 MBXW.D4L5 MBXW.C4L5 MBXW.B4L5 MBXW.A4L5 MBXW.A4R5 MBXW.B4R5 MBXW.C4R5 MBXW.D4R5 MBXW.E4R5 MBXW.F4R5 MBXW.F4L1 MBXW.E4L1 MBXW.D4L1 MBXW.C4L1 MBXW.B4L1 MBXW.A4L1 FUNCTION BEAM SEP D1.R1 0.0 0.8 3.6 8.4 15.3 24.1 D1.L5 24.1 14.5 8.4 3.6 0.8 0.0 D1.R5 0.0 0.8 3.6 8.4 15.3 24.1 D1.L1 24.1 15.3 8.4 3.6 0.8 0.0 S 61.3220 65.5880 69.8540 74.1200 78.3860 82.6520 13246.7896 13251.0556 13255.3216 13259.5876 13263.8536 13268.1196 13390.7636 13395.0296 13399.2956 13403.5616 13407.8276 13412.0936 26576.2312 26580.4972 26584.7632 26589.0292 26593.2952 26597.5612 MAGNET V ROTATED HCMBXW_001-BI000021 HCMBXW_001-BI000020 HCMBXW_001-BI000024 HCMBXW_001-BI000023 HCMBXW_001-BI000025 HCMBXW_001-BI000028 HCMBXW_001-BI000013 HCMBXW_001-BI000004 HCMBXW_001-BI000012 HCMBXW_001-BI000010 HCMBXW_001-BI000011 HCMBXW_001-BI000005 HCMBXW_001-BI000006 HCMBXW_001-BI000002 HCMBXW_001-BI000007 HCMBXW_001-BI000016 HCMBXW_001-BI000003 HCMBXW_001-BI000008 HCMBXW_001-BI000022 HCMBXW_001-BI000014 HCMBXW_001-BI000017 HCMBXW_001-BI000019 HCMBXW_001-BI000015 HCMBXW_001-BI000018 3. Measurements The requirements of measurements during production are described in detail in [4-6]. Transfer function: Each magnet is measured with a Hall probe array (19 probes positioned horizontally). The field integral is evaluated by measuring many points in the longitudinal direction, covering 4 m to include head effects and with a measurement point for each 2 mm. The MBW magnet is cycled 4 times from 0 to 810 A, ramp rate 5 A/s and flat-top of 30 s to stabilise the field (reproducibility). The MBW integral field measurements are evaluated for the currents 100, 500, 720 and 810 A. The MBXW magnet is cycled 4 times from 0 to 835 A, ramp rate 5 A/s and flat top of 25 s. The MBXW integrated field measurements are evaluated for the currents 100, 500, 730 and 830 A. The MCBW magnet is cycled 4 times from 0 to 650 A, ramp rate 25 A/s and flat top of 25s. The field integral are evaluated for the currents 100, 500, 550 and 600 A, The Hall probe measurements are calibrated with absolute values to a NMR measurement of the MBW-, MBXW-2 and MCBW-1 magnets. As we can see in Table VIII and IX the beam separation is dependent on the longitudinal position. For this reason, the field is measured horizontally to cover +/- 45 mm of aperture. However, for the FiDeL parameters we use only the measurements at the central position as we otherwise would have to take the actual slot into account for each magnet. The goals of the Hall measurements were to achieve an absolute error below 5 units. -5- Field harmonics: 3 magnets of each family were measured at CERN with rotating coils: MBW 1, 9 and 15 and MBXW 1, 9 and 20. These measurements give us an estimate of the multipoles of the series production. The field errors of MCBW are only a fraction of units and can therefore be ignored given the fact that it is a corrector. 4. MBW transfer function 4.1 INITIAL DECISIONS Table X shows the integrated transfer function for all the Hall measurements. There is no significant difference between aperture 1 and 2 so we can safely take the average value of the two for the purpose of computing the FiDeL parameters. These data served as the only source for fitting the REFPARM in 2008. This time we also want to make comparison with all the rotating coil measurements. Please note that 640 A is the maximum foreseen current: at this level, saturation is around 1%. Table X: Statistics summary of MBW Hall probe measurements, integrated field, average and sigma expressed in units of geometric value at 100 A. Aperture I (A) 1 1 1 1 2 2 2 2 100 500 720 810 100 500 720 810 TF (Tm / A) TF ave (units) TF sigma (units) 0.00692104 0 4 0.00690243 -27 4 0.00672390 -285 14 0.00648078 -636 21 0.00692110 0 4 0.00690242 -27 3 0.00672368 -285 14 0.00648070 -636 20 100 0 MBW 1 TF (units) -100 -200 -300 -400 -500 -600 -700 0 200 400 600 800 Current (A) Fig. 3: Comparison of all the measurements of the MBW 1 magnet after removing geometric at 100A and converting to units. Original NMR measurement (red circles), 2 separate rotating coil measurements magnet at CERN (green box and blue triangles), Hall integral (black diamonds). -6- Fig. 3 shows all measurements we have of MBW 1. The rotating coil measurements are all local ones from the central part. The measurements agree within 20 units over the current range. Fig. 4 shows the plots of all local rotating coil measurements together. We decide to use the average (dotted line) for making one fit for all the MBW magnets. Table XI gives the average and spread expressed in units of geometric at 100 A. The local rotating coil measurements have about 50 units less saturation w. r. t. the Hall measurements at 720 A (244 units instead of 294 units), which is already beyond the maximum operational current of 650 A (see Tables X and XI). 50 MBW 1,9,15 TF (units) 0 -50 -100 -150 -200 0 200 400 600 800 Current (A) Fig. 4: All local measurements of MBW 1, 9 and 15 plotted together for comparison, circles = RC measurement, average = dotted line. Table XI: Statistics summary of all local MBW rotating coil measurements, average and sigma expressed in units of geometric value at 100 A. I (A) 30 40 100 150 200 300 400 500 600 650 700 720 750 810 TF ave (units) TF sigma (units) 12 5 -3 5 0 0 4 3 6 5 6 4 1 1 -11 3 -38 4 -82 6 -184 9 -244 14 -347 17 -590 20 -7- 4.2 GEOMETRIC We use the integral Hall measurement at 100 A to define the geometric component. We give each magnet its individual value for the purpose of being as accurate as possible for simulations in MAD-X. Since the magnets are connected in series on only 2 circuits we expect that the geometric will be practically the same for both circuits: this is the case, within 1 unit, see Table XII. Table XII: TF geometric, average and spread for the MBW circuits CIRCUIT RD34.LR3 RD34.LR7 TF (Tm / A) TF (units) 0.00692186 0.00692121 Average Stdev 0.5 -0.5 0.00692154 0.7 4.3 SATURATION COMPONENT There are no dynamic, time-dependent components for normal-conducting magnets. The fits are done according to the equations in [7]. We use only the saturation component to fit the TF curve in Fig. 4. 𝑇𝐹 = 𝛾 𝑔𝑒𝑜 + 𝑇𝐹 𝑠𝑎𝑡 𝑇𝐹 𝑠𝑎𝑡 = − 𝜎𝑚 𝐼 − 𝐼0 [1 + 𝑒𝑟𝑓 (𝑆 )] 2 𝐼𝑛𝑜𝑚 In principle we should also have included the residual magnetisation component, which can be seen in Table XI as 12 units at 30 A. However, the power supply cannot reproduce the precycle done for the measurements as it can only go slightly lower than the injection current. Therefore we do not know how strong this effect is. The fit is based on the average of the Hall measurements merged with average of local measurements in Table X and XI. We give more weight to the Hall measurements at high current, assuming the local RC measurements underestimate head effects. The measurements with current < 300A are not considered. We notice that in Table XI the values for currents between 150 and 400 A are slightly positive. This could be because we have defined the geometric at too low current where the residual magnetisation is still present. But we need to use the value at 100 A in order to calibrate the curve to the absolute Hall integral value at 100 A. The alternative would have been to define the geometric at 500 A, but we assume to have some saturation at this current. -8- 100 0 TF (units) -100 -200 -300 -400 -500 -600 -700 0 200 400 600 800 Current (A) Fig. 5: Fit of the MBW TF component saturation (units), rotating coil measurements (triangles), FiDeL curve (dotted line), Hall probe measurements (diamonds). Fig 5. illustrates that we have some discrepancy between the RC and Hall integral measurements at high current. The fit goes almost exactly through the Hall measurements points at 100 and 810 A. There is a difference of 30 units between fit and Hall measurement at 720 A. The FiDeL fit parameters are shown in Table XIII and XIV. The residual fit error is shown in Fig. 6. This is just based on the difference between the FiDeL and the measured values without considering uncertainty of the measurements and estimates. The error of the fit is below 20 units in the operational current range. Table XIII: FiDeL TF 2008 fit parameters for MBW saturation Parameter s I0 s Inomref Units (T m /A) (A) (adim) (A) Value 0.00167790 900.9500 3.5982 720 Table XIV: FiDeL TF 2009 fit parameters for MBW saturation Parameter s I0 s Inomref Units (T m /A) (A) (adim) (A) -9- Value 0.00161642 896.2477 3.5510 720 30 Residual error (units) 20 10 0 -10 -20 -30 -40 30 230 430 630 830 Current (A) Fig. 6: Error of the fit of the MBW TF, 2009 parameters (units). 5. MBW field errors The local rotating coil measurements provide the field harmonics. We have to assume that the integral harmonics are equal to the local values, since the information about the heads are not available. We have only measurements for three magnets: MBW 1, 9 and 15. Table XV summaries the situation. We decide to model b3, b5 and b7 since the average is somewhat significant and larger than the spread. These harmonics are also expected (“allowed”) from design point of view. It is assumed the field errors in the cleaning insertions are of low importance since the beta-function is moderate. Anyhow we choose to model the field errors for the sake of completeness for MAD-X simulations. We decide to only use the geometric value for the harmonics. In fact we use the average value of 40 and 600 A since the harmonics seems rather constant in this current region. See last row in Table XV. Table XV: Average and standard deviation for the MBW harmonics. Ap I (A) b2 a2 b3 a3 b4 a4 b5 a5 b6 a6 b7 a7 b8 a8 b9 a9 b10 a10 b11 a11 ave stdev 1 1 40.0 0.3 1.8 0.1 0.1 1.5 0.4 0.0 0.1 0.0 0.4 0.0 -0.4 0.0 0.3 0.0 0.0 0.0 -0.3 0.0 0.0 0.0 -0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.4 0.1 0.2 0.0 0.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0 ave stdev 1 1 600.0 0.7 1.6 0.1 0.3 1.3 0.4 0.0 -0.1 0.1 0.5 0.0 -0.3 0.0 0.3 0.0 0.0 0.0 -0.3 0.0 0.0 0.0 -0.1 0.0 0.0 0.0 0.0 0.0 0.1 0.4 0.1 0.2 0.1 0.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0 ave stdev 1 1 810.0 1.5 1.3 0.2 -0.5 0.2 0.8 0.0 -0.2 0.2 1.0 0.1 -0.6 0.1 0.3 0.0 0.1 0.0 -0.3 0.0 0.0 0.0 0.1 0.4 0.1 0.2 0.1 0.2 0.0 ave stdev 2 2 40.0 -0.5 1.8 0.0 0.1 1.4 0.5 0.0 0.1 0.0 0.5 0.0 -0.4 -0.1 0.1 0.0 -0.3 -0.1 0.1 0.0 -0.1 0.0 0.0 0.0 0.0 0.0 0.1 0.2 0.1 0.5 0.1 0.2 0.1 0.2 0.1 0.0 0.0 0.0 0.0 0.0 0.0 ave stdev 2 2 600.0 -0.7 1.6 0.0 0.1 1.3 0.5 0.0 0.2 0.1 0.5 0.1 -0.3 0.1 0.2 0.0 0.0 0.1 -0.3 -0.1 0.1 0.0 0.2 0.4 0.2 0.2 0.1 0.2 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.0 0.1 0.0 0.1 0.0 ave stdev geo 2 2 810.0 -1.4 1.1 0.2 -0.4 -0.1 0.2 0.8 0.3 1.4 0.3 0.8 0.1 -0.5 -0.1 0.0 0.0 -0.2 -0.1 0.1 0.0 0.2 0.2 0.1 0.3 0.2 0.2 0.1 0.2 0.1 -0.4 -0.3 0.0 0.0 0.1 0.0 0.1 0.0 0.2 0.0 0.2 0.0 0.1 0.0 - 10 - 0.0 0.0 -0.1 0.0 0.1 0.0 0.1 0.0 0.1 0.0 0.1 0.0 6. MBXW transfer function 6.1 INITIAL DECISIONS Table XVI shows the integrated transfer function for all the Hall measurements. It depends on the calibration of one single NMR measurement of MBXW 1. The spread increases with the current but is low in most of the operational range. Please note that at the maximum operational current of 680 A the saturation is about 2%. Table XVI: Statistics summary of MBXW Hall probe measurements, integrated field, average and sigma expressed in units of geometric value at 100 A I (A) TF (Tm / A) TF ave (units) TF sigma (units) 100 0.00655273 0 7 500 0.00653464 -28 4 750 0.00627223 -428 14 830 0.00606208 -749 16 100 0 MBXW 1 TF (units) -100 -200 -300 -400 -500 -600 -700 -800 0 200 400 Current (A) 600 800 Fig. 7: Comparison of the measurements of the MBXW 1 magnet after removing geometric at 100A and converting to units. Original NMR measurement (red circles), 2 separate rotating coil measurements magnet at CERN (green box and blue triangles), Hall integral (black diamonds). Fig. 7 shows all measurements we have of MBW 1. The rotating coil measurements are all local ones from the central part. One can see that the Hall measurement has been calibrated to the NMR. The measurements agree within 30 units over the operational current range. The NMR measurement shows stronger saturation. The two rotating coil measurements were done after the magnet arrived at CERN. They fully overlap in Fig. 7. Fig. 8 shows the plots of all local rotating coils measurements together. Table XVII gives the average and spread expressed in units of geometric at 100 A. The NMR measurement was used for the FiDeL model parameters in 2008. This time we add the local RC measurements for the shape of the TF curve. - 11 - 100 MBXW 1,9,20 TF (units) 0 -100 -200 -300 -400 -500 -600 -700 -800 0 200 400 600 800 Current (A) Fig. 8: All local measurements of MBW 1, 9 and 20 plotted together for comparison, dots = rotating coil measurement, average = dotted line. Table XVII: Statistics summary of all local MBXW RC measurements, average and sigma expressed in units of geometric value at 100 A I (A) 30 40 100 150 200 300 400 500 600 650 700 750 800 830 TF ave (units) TF sigma (units) 6 4 -3 13 0 0 7 3 6 3 5 2 -1 2 -12 2 -43 8 -107 22 -229 33 -397 39 -593 40 -718 39 6.2 GEOMETRIC We use the integral Hall measurement at 100 A to define the geometric component. We give each magnet its individual value for the purpose of being as accurate as possible for simulations in MAD-X. Since the magnets, except MBXW 1 having its own power supply, are connected in series on only 2 circuits we expect that the geometric will be practically the same for both circuits, see Table XVIII. - 12 - Table XVIII: TF geometric, average and spread for the MBXW circuits CIRCUIT TF (Tm / A) TF (units) RD1.LR1 0.00655124 RD1.LR5 0.00655370 RBXWH.L8 0.00656430 -7.9 -4.1 12.0 Average Stdev 10.6 0.00655641 6.3 SATURATION COMPONENT There are no dynamic, time-dependent components for normal-conducting magnets. The fits are done according to the equations in [7]. We use only the saturation component to fit the TF curve in Fig. 8. In principle we should also have included the residual magnetisation component, which can be seen in Table XVIII as 6 units at 30 A. However, the power supply cannot reproduce the pre-cycle done for the measurements as it can only go slightly lower than the injection current. Therefore we do not know how strong this effect is. 𝑇𝐹 = 𝛾 𝑔𝑒𝑜 + 𝑇𝐹 𝑠𝑎𝑡 𝑇𝐹 𝑠𝑎𝑡 = − 𝜎𝑚 𝐼 − 𝐼0 [1 + 𝑒𝑟𝑓 (𝑆 )] 2 𝐼𝑛𝑜𝑚 The fit is based on the average of the Hall measurements merged with average of local measurements in Table XVI and XVII. We give more weight to the Hall measurements at high current, assuming the local RC measurements underestimate head effects. The measurements with current < 400A are not considered. We have also used a ROXIE model for the MBXW magnets. It gives significantly less saturation effect than what has been measured. Therefore we do not use it. Fig 9. illustrates that the fit matches well the Hall measurements, except at 500 A where there is a difference of 20 units. We assume in general the RC measurements underestimate head effects. The FiDeL fit parameters are shown in Table XIX and XX. The residual fit error is shown in Fig. 10. This is just based upon the difference between the FiDeL and the measured values without considering uncertainty of the measurements and estimates. Table XIX: FiDeL TF 2008 fit parameters for saturation. Parameter s I0 s Inomref Units (T m /A) (A) (adim) (A) Value 0.00075038 789.8300 4.3711 690 Table XX: FiDeL TF 2009 fit parameters for saturation. - 13 - Parameter s I0 s Inomref Units (T m /A) (A) (adim) (A) Value 0.00077631 791.7549 4.2487 690 100 0 -100 TF (units) -200 -300 -400 -500 -600 -700 -800 -900 0 200 400 600 800 Current (A) Fig. 9: Fit of the MBXW TF component saturation (units), measurements (triangles), FiDeL curve (dotted line), Hall probe measurements (diamonds), ROXIE estimate (squares). Residual error (units) 40 30 20 10 0 -10 -20 -30 0 200 400 600 Current (A) Fig. 10: Residual error of the fit of the MBXW TF (units). - 14 - 800 7. MBXW field errors The local RC measurements contain harmonics. We have to assume that the integral harmonics are equal to the local values. We have only measurements for three magnets: MBW 1, 9 and 20. Table XXI summaries the situation. The field quality is excellent! We decide not to model any. The only harmonic that shows up is b2, but the value is only -0.2 units Table XXI: Average and standard deviation for the MBXW harmonics. I (A) b2 ave stdev a2 b3 40.0 -0.2 0.1 -0.2 0.2 ave 500.0 stdev -0.2 0.1 0.0 0.1 ave 750.0 stdev ave 830.0 stdev 0.1 0.3 a3 b4 a4 b5 a5 b6 a6 b7 a7 b8 a8 b9 a9 b10 a10 b11 a11 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -0.1 0.3 0.1 0.0 0.0 0.0 0.0 0.1 0.1 0.0 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -0.2 0.1 0.0 -0.4 -0.1 0.1 0.3 0.1 0.0 0.0 0.0 0.0 0.1 0.2 0.0 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 -0.3 0.1 0.0 -0.9 -0.1 0.1 0.3 0.1 0.0 0.0 0.0 0.0 0.1 0.2 0.0 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 - 15 - 8. MCBW transfer function 8.1 INITIAL DECISIONS Table XXII shows the integrated transfer function for all the Hall measurements. It depends upon the calibration of one single NMR measurement of MCBW 1. The spread is unusually low in all the operational range. Saturation is about 1% at the nominal current of 500 A. Table XXII: Statistics summary of MCBW Hall probe measurements, integrated field, average and sigma expressed in units of geometric value at 100 A I (A) TF (Tm / A) TF ave (units) TF sigma (units) 100 0.00349836 0 5 500 0.00346060 -108 6 550 0.00342069 -222 6 600 0.00335983 -396 6 50 0 MCBW 1 TF (units) -50 -100 -150 -200 -250 -300 -350 -400 0 200 400 600 800 Current (A) Fig. 11: Measurements of the MCBW 1 magnet after removing geometric at 100A and converting to units. Local rotating coil measurement at CERN (green triangles), Hall integral (black diamonds). 8.2 GEOMETRIC We use the integral Hall measurement at 100 A to define the geometric component. Since the spread is only 6 units in Table XXII we use the same value for all 20 magnets. 8.3 SATURATION COMPONENT There are no dynamic, time-dependent components for normal-conducting magnets. The fits are done according to the equations in [7]. We use only the saturation component to fit the TF curve in Fig. 11. In principle we should also have included the residual magnetisation component, but the measurement in Fig. 11 does not show any effect so we are missing data to evaluate this effect. The data for the fit is shown in Table XXIII. We use the average of the Hall measurements. In addition we add some extra current points from the initial NMR measurement. The resulting TF curve is shown in Fig. 12 and the residual error in Fig. 13. - 16 - Table XXIV and XXV reveals that the FiDeL parameters are almost the same for 2008 and 2009. 𝑇𝐹 = 𝛾 𝑔𝑒𝑜 + 𝑇𝐹 𝑠𝑎𝑡 𝑇𝐹 𝑠𝑎𝑡 = − 𝜎𝑚 𝐼 − 𝐼0 [1 + 𝑒𝑟𝑓 (𝑆 )] 2 𝐼𝑛𝑜𝑚 Table XXIII: Data used to fit the MCBW transfer function, expressed in units of geometric value at 100 A I (A) TF ave (units) 100 0 196 -8 244 -10 292 -12 340 -15 388 -20 436 -31 484 -71 500 -108 550 -222 600 -396 50 0 -50 TF (units) -100 -150 -200 -250 -300 -350 -400 -450 0 100 200 300 400 500 600 Current (A) Fig. 12: Fit of the TF component saturation (units), triangles = measurements, dotted line = FiDeL curve, diamonds = Hall probe measurements. - 17 - Table XXIV: FiDeL TF 2008 fit parameters for saturation Parameter s I0 s Inomref Units (T m /A) (A) (adim) (A) Value 0.00049874 669.7600 3.2866 550 Table XXV: FiDeL TF 2009 fit parameters for saturation Parameter s I0 s Inomref Units (T m /A) (A) (adim) (A) Value 0.00049872 669.7253 3.2877 550 Residual error (units) 15 10 5 0 -5 -10 -15 0 200 400 600 Current (A) Fig. 13: Residual TF 2009 fit error (units). 9. Summary and critical issues All magnets have been measured individually with Hall probes. Each one of the three families (MBW, MBXW and MBCW) shows a pretty low spread (a few units). For the main magnets the geometric has been modelled individually, but the resulting differences in the TF of the circuits are small: within 1 unit for the MBXW and within 10 units for the MBW. For the correctors one TF has been adopted. The precision of this measurement, calibrated with NMR probes should be of a few units. All magnets have a relevant saturation (between 1 and 2% at nominal current). A systematic difference in the saturation component is observed between the Hall and - 18 - the rotating coil measurements (which do not include the magnet heads). Close to the nominal current we can expect a larger error of the model, of the order of 10 units. Field quality, measured with rotating coils, is very good and practically not sensitive to the current. It has been modelled only for a few harmonics in the MBW. Acknowledgements We wish to thank the personnel in BINP and CERN doing the measurements, R. Wolf for making the original analysis and REFPARM file for the 2008 start-up, L. Bottura, M. Buzio, S. Ramberger, G. de Rijk and E. Todesco for discussions, equations and feedback. References [1] [2] [3] [4] O. Bruning, et al., CERN Report 2004-003 (2004) R. Wolf, “Corrector Memo”, internal department memo, 2006 R. Wolf, “Field Error Naming Conventions For LHC magnets”, rev 3, EDMS 90250, 2001 G. de Rijk “Technical Specification for the magnet measurements of the MBW magnets for the LHC beam cleaning insertions”, EDMS 310226, 2001 [5] G. de Rijk “Technical Specification for the magnet measurements of the MBXW magnets for the LHC beam cleaning insertions”, EDMS 473793, 2002 [6] S. Ramberger et al “Normal-Conducting Separation and Compensation Dipoles for the LHC Experimental Insertions”, EDMS 703192, 2006 [7] FiDeL Model specifications, EDMS 908232, 2008 - 19 - Appendix A We include the following simple treatment to better understand the optical issues involved. The strength assigned to an optical element like a magnet is normalised with the design radius for a particle with nominal momentum, and nominal bending field in the arc. A dipole has the simple strength equation: kb = Bb Bmb_arc ρ0 There is a good reason for this normalisation. The B field scales linearly with particle momentum to preserve geometry. Dividing by Barc and ρ0 we obtain momentum invariance and a circle with unit radius. For small angles (sinΘ ~ Θ) we can multiply the dipole field with the magnetic length to get the deflection angle. Therefore the bending strength of an ideal arc dipole can be approximated with a simple equation for the bending deflection: θmbarc = k mb_arc lmb_arc = 2π nmb_arc Thanks to the normalised bending strength, we can now express small bending angles in the machine using simple geometry (without explicit reference to magnetic fields). In addition the deflection can be thought of as taking place in the middle of the magnet (discontinuity rather than a smooth arc function). The principle is shown in Fig. 14. Dn+1 IR region where no Barc field so s-axis is a straight line segment Dn ln ln+1 Δh = bs/2 Θd s-axis Δs Fig. 14: Simplified diagram for particle motion through two magnets changing the beam separation. The beam goes through the Dn magnet where it receives a small deflection angle in the middle of the magnet (ln/2). The beam travels in a straight line to next dipole magnet where the deflection angle is cancelled. The s-axis is a straight line for the IR-region and is in the mid-plane between the 2 beams. If we imagine that the same process takes place in the other beam travelling from right to left in Fig. 11 (not shown for simplicity), the change in beam separation is 2Δh so the deflection angle is: Θd = tan−1 ( The bending strength for Dn is: - 20 - Δbs ) 2Δs 𝑘𝑑 = 1 𝛩 𝑙𝑛 𝑑 Example: On the right side of IP1 (ATLAS) we have D1 equal to 6 x MBXW in series. The s-coordinate of s(D1_mid) = 71.987 m and for s(D2_mid) = 157.900 m so Δs = 85.913 m. Δh = 0.194 / 2 m because before D1 the beam separation is close to 0 and after D2 the standard arc-separation is required. This gives: Θd ~ 𝑘𝐷1 = 0.194 2∗85.913 1 6 𝑙𝑀𝐵𝑋𝑊 𝑘𝐷2 = 1 𝑙𝑀𝐵𝑅𝐶 rad ~ 1.129 mrad 𝛩𝑑 ~ 1.129 6 ∗ 3.4 ∗ 1000 𝛩𝑑 ~ 1.129 9.45 ∗ 1000 As a rule of thumb we can expect that 1 m of superconducting dipole magnet in LHC (NbTi) corresponds roughly to 2.5 m of a conventional magnet (max operational field of 8.5 T vs 3.5 T). Finally we present the equations for computing the Δh more precisely. These equations are based upon the notation in Fig. 11. The bending magnet forces the particle into a circular motion with a bending radius ρD over an interaction region equal to the magnetic length. The equation for motion on a circular path requires: 𝑠 2 + (∆ℎ − 𝜌𝐷1 )2 = 𝜌𝐷1 2 where s=0 when it encounters the magnet and s = lD1 at exit. Over this length the bending angle has increased linearly in s from 0 to Θd. We relate the magnetic length and bending radius: 𝑙𝐷1 = 𝜌𝐷1 sin 𝛩𝐷 Since Θd is small we find 𝜌𝐷1 = 𝑙𝐷1 𝛩𝐷 The increase in h for the interval 0 ≤ s ≤ lD1 can be written as: 2 𝑙𝐷 𝑠𝛩 𝛥ℎ1 (𝑠) = 1 [1 − √1 − ( ) ] 𝛩𝐷 𝑙𝐷1 The increase in h after exit of D1 and until it enters D2 (drift space) is given by Θd: 𝛥ℎ𝑑 (𝑠) = (𝑠 − 𝑙𝐷1 ) tan 𝛩𝐷 D2 will undo the bending angle. We find the equation Δh2 by rotating the equation for Δh1 around both the h and the s-axis: - 21 - 𝑙𝐷 𝛥ℎ2 (𝑠) = − 𝛩 2 [1 − √1 − ( 𝐷 (𝑠−𝑙𝐷2 )𝛩 𝑙𝐷2 2 ) ]+ 𝑙𝐷2 𝛩𝐷 [1 − √ 1 − 𝛩𝐷 2 ] Note that also in D2 we have used s=0 for the start of the magnetic length. The last term in the equation is due to the fact that we introduce the boundary condition for convenience: 𝛥ℎ2 (0) = 0 This allows us to express the total Δh as the sum of the 3 individual components and the beam separation as 2Δh. Fig 12. shows the graph of beam separation right of IP1 using the equations. 0.25 0.2 0.15 0.1 0.05 0 60 80 100 120 140 160 Fig. 15: Beam separation (m) on the right side of IP1 (ATLAS) as function of s (m). - 22 -