PLTW Formula Sheet
advertisement

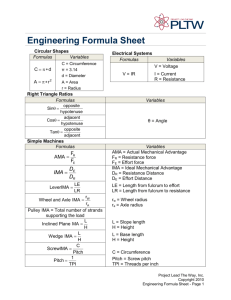
Engineering Formula Sheet Circular Shapes Formulas Variables C d A r2 C = Circumference π = 3.14 d = Diameter Electrical Systems Formulas V = IR I = Current R = Resistance A = Area r = Radius Right Triangle Ratios Formulas Variables opposite Sin hypotenuse adjacent Cos hypotenuse opposite Tan adjacent θ = Angle Simple Machines Formulas AMA FR FE IMA DE DR LeverIMA Variables AMA = Actual Mechanical Advantage FR = Resistance force FE = Effort force IMA = Ideal Mechanical Advantage DR = Resistance Distance DE = Effort Distance LE LR Wheel and Axle IMA Variables V = Voltage LE = Length from fulcrum to effort LR = Length from fulcrum to resistance rW rA Pulley IMA = Total number of strands supporting the load L Inclined Plane MA H L Wedge IMA H C ScrewIMA Pitch 1 Pitch TPI rw = Wheel radius ra = Axle radius L = Slope length H = Height L = Base length H = Height C = Circumference Pitch = Screw pitch TPI = Threads per inch Project Lead The Way, Inc. Copyright 2010 Engineering Formula Sheet - Page 1 Properties of Materials Formulas F σ AO ε LO δ FL O A OE σ ε F F L E 2 1 O δ 2 δ 1 A O E= Variables σ = Stress F = Axial force Ao = Cross-sectional area ε = Strain δ = Deformation Lo = Original length E = Modulus of Elasticity Fluids Formulas F P A V1 V2 T1 T2 Variables P = Pressure F = Force A = Area V = Volume P1 V1 P2 V2 Gear Ratios Formulas GR in out GR Nout Nin Nout dout in out Nin din out in Variables GR = Gear ratio ωin = Driver gear, rpm ωout = Driven gear, rpm Nin = Number of teeth on driver Nout = Number of teeth on driven din = Diameter of driver dout = Diameter of driven τin = Torque of driver, ft-lbs τout = Torque of driven, ft-lbs Kinematics Formulas V 2 * Sin 2 X i Vi gx Variables -g X = Range Vi = Initial velocity Sin 2 g = Acceleration due to gravity θ = Initial trajectory angle from the horizontal Vix Vi cos Vix = Initial horizontal velocity Viy Vi sin Viy = Initial vertical velocity Project Lead The Way, Inc. Copyright 2010 Engineering Formula Sheet - Page 2 Statics Formulas MF d FX 0 X(right ) X (left ) FY 0 Y up Y down M 0 CCW CW 2J M R Rectangular Sections bh3 I XX 12 Variables M = Moment about a point F = Force d = Perpendicular distance ∑ = Sum of X = Force in x-direction Y = Force in y-direction CCW = Counter-clockwise moment CW = Clockwise moment J = Number of joints M = Number of members R = Number of reaction forces IXX = Moment of inertia about x-x axis b = Base dimension h = Height Work and Power Formulas W F D P W t P V I P Q t P kA T L P UAT U 1 R Variables W = Work F = Force D = Distance P = Power W = Work t = Time V = Volts I = Current P = Rate of heat transfer Q = Energy transfer Δt = Difference in time k = Thermal conductivity A = Area of thermal conductivity L = Thickness ΔT = Difference in temperature U = Thermal transmittance (U-factor) R = Resistance to heat flow (R-value) Project Lead The Way, Inc. Copyright 2010 Engineering Formula Sheet - Page 3