The purpose of this experiment was to calibrate a
advertisement

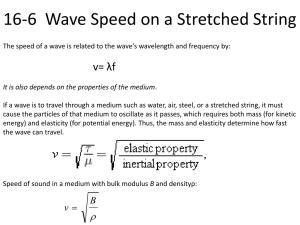
Jason Fong 702847140 date of experiment: 11-28-00 partner: Rosanne Hong and Victor Hwei Physics 4AL Lab 5 Experiment 7 Abstract and Introduction The purpose of this experiment was to investigate traveling and standing waves on a string. Various modes of standing waves were created and examined. The predicted and measured frequencies of the sample of modes that were examined were found to agree fairly well. The velocity of a traveling wave in a string is determined by the tension in the string and the density of the string. The tension of the string affects the velocity because it provides the force to return the string to its original position after it is displaced. The tension on each particle of the string comes from the neighboring particles of the string. When a particle of the string is displaced up, the neighboring particles pull down on the displaced particle while they are being pulled up by the displaced particle. The greater the tension, the greater the pulling force on each particle will be, and the displacement of the particles of the string will occur more quickly. Thus, a greater tension on the string will result in a greater wave velocity on the string. The density of the string affects the velocity of the traveling wave because it effects the mass of each particle of the string. The greater the density of the string, the greater the mass of particles of the string that are of equivalent volume. The greater mass means that each particle will have more inertia and will accelerate slower. The slower acceleration of each particle causes the traveling wave to propagate through the string slower because the force of the wave is more slowly transferred to each neighboring particle of the string. Thus, a greater density of the string will result in a lower velocity of a traveling wave. Standing waves are formed by the interference of the waves traveling in opposite directions along the string. When a standing wave is present on the string, there are points of maximum amplitude called antinodes and points of no movement called nodes. The displacement at each point of the combined wave is found by summing together the displacements caused by each individual wave. The antinodes are formed at points where the phases of the two interfering waves cause the maximum constructive interference, and the nodes are formed at the points of complete destructive interference so that the displacements of the waves cancel each other out. Different frequencies of the wave driver will create different modes of standing waves in the string. A mode of the string is a certain standing wave pattern created on the string. Each of the modes are identified by a n number. n=1 signifies the fundamental standing wave of the string. Each of the modes are characterized by a certain pattern of nodes and antinodes. The modes are different from nodes in that a mode is a certain standing wave pattern and a node is a point of zero displacement on the string. Formulas The following are the formulas used in this lab. The tension T in the string of mass m is given by: T mg The uncertainty in that is given by: T gm The density μ of the mass m string based on the tension T on the string and the total length of the stretched string Ltotal is given by: m Ltotal The uncertainty in that is given by: 1 m m L m 2 L m L L L 2 2 2 2 The formula for the predicted velocity v of the wave based on the tension T on the string and the density μ of the string is: v predicted T The uncertainty in this is: 2 v predicted 2 2 1 T v v T T 3 T 2 T 4 2 The measured velocity of the traveling wave can be obtain by using the total length traveled and the time taken to travel that distance. vmeasured L t The uncertainty in this is: v v 1 L L t L 2 t L t t t 2 vmeasured 2 2 2 The formula relating wavelength λ of mode n to the length of the string L: n 2L n The formula relating the frequency f of the wave to the velocity v of a traveling wave and the wavelength λ: fn v n The uncertainty in this is: v f f n v n v 2 Using the formula relating the string length to wavelength gives: fn nv 2L For a predicted frequency, the uncertainty would be: f pred v pred n nv pred 2L 2 n 2L 1 T T 3 2 T 4 2 Procedure This experiment was set up by taking a long string, clamping one end down, running it horizontally over a table, and placing the other end over a pulley and vertically hanging a weight off the end of the string. The density of the string was found by weighing the string and measuring the length of the string after the weight was attached, and then using those values to calculate the density. A device to drive the wave motion was attached to the end near the clamp, and a laser and a light detector were placed at the end near the pulley. The wave driver could drive the string at an inputted frequency. The light detector would measure the displacement of the string by measuring the intensity of the laser light reflected. The laser was positioned so that more of the beam would be intercepted when the string rose higher. So, the intensity of the light reflected would indicate what position the string was in. In order to measure the velocity of a traveling wave, the wave driver sent a single pulse down the string and then the time for several return pulses of the wave was taken from the scope readings of the laser light intensity. The number of pulses detected and the length of the string were used to calculate the velocity. The velocity of the wave and the length of the string was then used to calculate predicted values for the frequencies of various modes of standing waves. Then those modes were produced and the actual frequencies needed to produce them were noted. The frequencies were found by adjusting the frequency of the wave driver until the amplitude on the scope was at a relative maximum and the expected number of nodes were visible along the string. Data Analysis and Error Analysis A predicted velocity of the wave was first calculated by using the tension on the string and the density of the string. The tension was supplied by the weight hanging on the end of the string over the pulley, so the tension force is the force of gravity pulling on the weight. T Mg where T is the tension force in the string, M is the mass of the weight used, and g is the acceleration due to gravity. The density of the string was more difficult to calculate since depending on the weight used, the string would stretch different amounts so that the length and density of the string would be different. The length of the string up to the pulley is the same for all weights used, so only the length from the pulley to the weight would change. The length from the driver end to the pulley was found to be 230 ± 1 cm, and since the radius of the pulley was 2.5 cm, the length of the string over the pulley was a quarter of the circumference of the circle, or 0.039 ± 0.001 m. The density could then be found by using the stretched length of the string and the measured mass of the string. The mass of the string was found to be 13.6 ± 0.1 g, or 0.0136 ± 0.0001 kg. The tension and density of the string could then be used to find the velocity of a traveling wave along the string. The following table summarizes the resulting densities and predicted velocities for each of the different weights. Mass Tension Total Length Density Predicted Velocity .3000 ± 0.0001 kg 2.955 ± 0.001 N 2.93 ± 0.01 m .00464 ± 0.00004 kg/m 25.2 ± 0.1 m/s .2570 ± 0.0001 kg 2.534 ± 0.001 N 2.62 ± 0.01 m .00519 ± 0.00004 kg/m 22.1 ± 0.1 m/s .2500 ± 0.0001 kg 2.463 ± 0.001 N 2.53 ± 0.01 m .00538 ± 0.00004 kg/m 21.4 ± 0.1 m/s This table shows that for increasing masses, the velocity of a traveling wave increases. This makes sense since a greater mass creates a greater tension in the string. As previously discussed, the greater tension will lead to a greater traveling wave velocity. For the first part of the lab, traveling waves were used to measure the velocity of waves on the string. The measured velocity could then be compared to the velocity predicted. A single pulse was sent from the wave driver, and that pulse was allowed to reflect a few times. The wave travels two lengths of the string between each time it reaches the laser detector. The scope readings of the reflected laser lights showed downward spikes each time the pulse reached the other end. The scope shows a spike because the string will have much increased displacement when the pulse arrives at the laser spot. Using the scope readings, the time was taken for a certain number of spikes in the graph. The distance between each spike represents twice the length of the string since the pulse must travel back to the driver and then to the laser again between each spike. The velocity could then be calculated by using the time and the distance for the number lengths needed to create that number of spikes. The following table summarizes the results. Mass Time Spikes Lengths Total Length Measured Traveled Traveled Velocity .3000 ± 0.0001 kg 1.741 ± 0.001 s 8 16 36.80 ± 0.01 m 21.14 ± 0.01 m/s .2570 ± 0.0001 kg 1.718 ± 0.001 s 7 14 33.20 ± 0.01 m 19.32 ± 0.01 m/s .2500 ± 0.0001 kg 1.764 ± 0.001 s 7 14 33.20 ± 0.01 m 18.82 ± 0.01 m/s The predicted velocities were faster than the measured velocities. This makes sense since the wave will lose energy as it moves up and down the string. The energy loss will be due to air resistance, heat, and the imperfect transfer of energy between each particle of the string and the imperfect reflection of the wave at the endpoints of the string. The energy loss will result in a reduced measured speed of the wave as seen in the tables. The following table summarizes the difference between the predicted and measured velocities. The percentage difference is given by v pred vmeas v pred . Mass vpred vmeas Absolute Percentage Difference Difference .3000 ± 0.0001 kg 25.2 ± 0.1 m/s 21.14 ± 0.01 m/s 4.06 16.1 % .2570 ± 0.0001 kg 22.1 ± 0.1 m/s 19.32 ± 0.01 m/s 2.78 12.6 % .2500 ± 0.0001 kg 21.4 ± 0.1 m/s 18.82 ± 0.01 m/s 2.58 12.1 % The case using the 300 g weight was investigated further. The time for the pulse from the wave driver to first reach the laser was measured to be 99.6 ± 0.1 ms. The time for the 8 spikes, or 16 lengths of the string, was 1740.8 ± 0.1 ms; so the time for one length is 108.8 ms. The time from the 8 spikes is 9.24% off from the time for the pulse to first reach the laser. The time for the 8 spikes is slower because energy is lost in the later reflections of the wave due to the reasons mentioned above. The loss of energy means that the wave will travel slower, which results in a longer time measured for the wave to travel a length of the string. The frequency of the fundamental mode for each weight is the frequency that will produce the n=1 standing wave in the string. This standing wave will have nodes at the endpoints and an antinode at the center of the string. The wavelength is twice the length of the string since only half of the wavelength will fit on the string. Using this information, the frequency for the fundamental mode for each weight can be calculated from the measured velocities of the wave on the string using the formula f n v n . The following table summarizes the results. Mass Wavelength Predicted Velocity Predicted Fundamental Frequency f1 .3000 ± 0.0001 kg 4.60 ± 0.01 m 25.2 ± 0.1 m/s 5.478 ± 0.002 Hz .2570 ± 0.0001 kg 4.60 ± 0.01 m 22.1 ± 0.1 m/s 4.804 ± 0.002 Hz .2500 ± 0.0001 kg 4.60 ± 0.01 m 21.4 ± 0.1 m/s 4.652 ± 0.002 Hz The frequencies for each of the other modes can by calculated with the n number of each mode by using f n nv . For the case with the 300 g weight, this was done for various modes as 2L listed in the following table. Based on previously calculated values, this table uses a velocity of 21.14 ± 0.01 m/s for waves in the string and a length of 2.30 ± 0.01 m for one length of the string that the wave travels along. Mode Predicted frequency 2 9.19 ± 0.04 Hz 3 13.79 ± 0.07 Hz 4 18.38 ± 0.09 Hz 5 22.98 ± 0.11 Hz 10 45.96 ± 0.22 Hz 20 91.91 ± 0.43 Hz 30 137.87 ± 0.65 Hz The frequency for various modes were found by adjusting the frequency of the wave driver until the desired mode was found. The mode was considered to have been found when the amplitude was at a maximum relative to other frequencies near it, and when the proper number of nodes were visible along the string. The following table summarizes the predicted and measured frequencies. Mode Predicted Frequency Measured Frequency 3 13.96 ± 0.07 Hz 13.786 ± 0.001 Hz 6 27.91 ± 0.13 Hz 27.572 ± 0.001 Hz 11 51.17 ± 0.24 Hz 50.548 ± 0.001 Hz 16 74.43 ± 0.35 Hz 73.525 ± 0.001 Hz 21 97.70 ± 0.46 Hz 96.501 ± 0.001 Hz The values for the frequencies agree pretty well. The slight difference is probably caused by factors such as air resistance, heat, imperfect transfer of energy between particles of the string, and imperfect reflection of the waves at the endpoints. For the even modes (n=2,4,6,...), there is a node at the center of the string. When a bar was placed at that node, the standing wave continued to remain in place on the string. The bar did not interfere with the wave because the string does not move at the node, so restricting movement at the node would not affect the wave. For odd modes, however, there is an antinode at the center of the string. When the bar was left at the same center point and odd modes were attempted to be created, the wave was disrupted once it reached the bar. Since the wave needs to move at the antinode, the wave is disrupted because the bar restricts the strings movement. This was observed as the standing wave being disrupted after passing the bar for odd modes. When the wave driver frequency was set halfway between the fundamental and the next higher mode, the resulting wave was not a standing wave. The wave was a jumble of interfering waves that had a lower amplitude than either of the standing wave frequencies. This is because the frequency halfway between the standing waves does not cause the outgoing and reflected waves to undergo the proper amount of constructive interference. The wave does not completely destructively interfere either, so the result is a jumbled wave that does not resemble a standing wave. The laser was placed 14.3 cm away from the pulley. As the frequency is increased, there will be a point when the wavelength becomes comparable to the distance separating the laser and pulley. When the wavelength is this distance, there will be a node at the laser spot. Since the node will not move, the laser light detector will not detect any movement, so no useful information will be collected by the laser light detector. This frequency can be calculated by considering what frequency would create a wavelength of the distance between the laser and the pulley, or .143 m. f v 25.2 m s 176 Hz .143 m Thus, the situation described above will occur at a frequency of around 176 Hz. Conclusion This experiment investigated the behavior of traveling and standing waves in a string. The velocity of traveling waves were found for various tensions on the string. The case with a 300 g mass providing the tension was examined in further detail. Various modes of standing waves were created and the predicted and measured frequencies of a set of modes were found to agree fairly well.