Chapter 8
advertisement

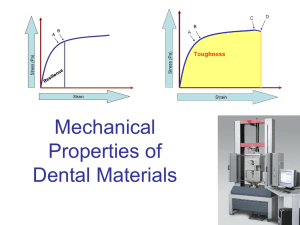
2001, W. E. Haisler 1 Chapter 8: Stress, Strain and Deformation in Solids Chapter 8 - Stress, Strain and Deformation in Solids For a beam in bending, we are often interested in determining the transverse displacement along the beam as shown below. y x u y ( x) u y ( x) displacement in y direction To do that, we would start with Conservation of Linear Momentum. Unfortunately, COLM is in terms of stress, . Consequently, we must have some way to relate stress to deformation. We will need additional equations as follows: Constitutive relations - relate stress to strain Kinematic relations - relate strain to displacement (gradients) 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 2 In the study of the motion of a solid or fluid, we will find it necessary to describe the kinematic behavior of a continuum body by defining expressions called strains in terms of the gradients of displacement components. In the example below, we consider an elastic bar of length L. If the bar is subjected by an axial force F, it will stretch an amount as shown in figure b). The quantity /L L is a measure of the change a) undeformed in length relative to the original length and is F F defined to be the axial L+ strain for the bar. b) stretched (deformed) 2001, W. E. Haisler In figure d), a shear load is applied that is parallel to the top surface as shown. The angle measures the amount the original right angle in figure c) has changed from a right angle, and the angle is related to the shear strain. What causes strain? 3 Chapter 8: Stress, Strain and Deformation in Solids o 90 c) undeformed F Mechanical loads (forces, pressures, etc.) Temperature change (thermal expansion) d) sheared (deformed) Moisture absorption ** Stress (relationship between stress and strain is the constitutive relationship) 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 4 In this chapter we will mathematically formalize these simple ideas to develop expressions for strains in terms of displacement components. We will consider two approaches: 1) mathematically precise approach and 2) a simpler geometrical approach. 2001, W. E. Haisler 5 Chapter 8: Stress, Strain and Deformation in Solids Deformations in solids are characterized by displacements of points and by elongations and rotations of line segments in the solid. z Initial State of Body u(r+dr) Q P Deformed State Q* dr u(r) dr* P* r r* x y r =position vector of point P (initial) r* =position vector of point P* (deformed) u(r) =displacement vector of point P dr = vector line segment between P and Q 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids Note the following geometry quantities: P moves to P*, Q moves to Q*, line segment P-Q deforms (stretches/rotates) to P*-Q*: = position vector of point P (initial state) = position vector of point P (in deformed state) u (r ) = displacement vector of point P (from initial to deformed state) dr = vector line segment between P and Q (initial state) dr * = vector line segment between P and Q (deformed state) u (r dr ) = displacement vector of point Q (from initial to deformed state) r r* 6 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 7 From geometry of the vectors, we can write two equations: displacement vector of point P: u (r ) r * r and dr u (r dr ) u (r ) dr * or dr * dr u (r dr ) u (r ) The last two terms represent the change (gradient) in displacement u with respect to position r , i.e., u (r dr ) u (r ) du dr (u ) ux x u y x uz x displacement gradient u ux y u y y uz y matrix (3x3). Note: not symmetric! ux z u y z uz z 2001, W. E. Haisler 8 Chapter 8: Stress, Strain and Deformation in Solids Definition of strain. Strain is a measure of the deformation and rotation of line segments. Consider two material elements dr & dr , which undergo deformations that will 1 2 bring them into new locations dr * & dr *; respectively. 1 2 z Initial State of Body dr 1 dr 2 u(r) r Deformed State dr* 1 dr*2 r* y x 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 9 Previously, we obtained for a line segment dr *: dr * dr u (r dr ) u (r ) dr du dr dr (u ) We will obtain identical expressions for the two line segments dr * and dr * defined in the figure above: 1 2 dr * dr dr (u ) 1 1 1 and dr * dr dr (u ) 2 2 2 Consider the dot product of these two vectors (a scaler result!) 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 10 dr * dr * [dr dr (u )] [dr dr (u )] 1 2 1 1 2 2 dr dr dr [dr (u )] 2 1 2 1 [dr (u )] dr [dr (u )] [dr (u )] 1 2 1 2 T T =dr dr dr [(u ) (u ) (u ) (u ) ] dr 1 2 1 2 Recall that (u ) is a 3x3 matrix. The “T” in (u )T means that the matrix (u ) is transposed. The underlined term is defined as 2E so that dr * dr * dr dr dr (2 E ) dr 1 2 1 2 1 2 and E 12[(u ) (u )T (u ) (u )T ] Finite Strain Tensor 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 11 Note that the expression for the finite strain tensor E 12[(u ) (u )T (u ) (u )T ] contains two distinctive terms: 1 [(u ) (u )T ] linear in displacement gradients 2 1 [(u ) (u )T ] quadratic in displacement gradients 2 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 12 Infinitesimal Strain Tensor If the higher order terms are neglected from the finite strain tensor [E] (i.e., keep only linear displacement gradient terms), we obtain the infinitesimal strain tensor, []: 12[(u ) (u )T ] where [] is a 3x3 matrix given by: 2001, W. E. Haisler 13 Chapter 8: Stress, Strain and Deformation in Solids xx xy xz yx yy yz zx zy zz u u u 1 y x ( x) x 2 x y u 1 ux u y y ( ) x y 2 y u u u 1 ( x z ) 1 ( y uz ) 2 z x 2 z y 1 uz ux ( ) 2 x z 1 uz ( 2 y Note: Both [E] and [] are symmetric matrices. u z z y ) z u 2001, W. E. Haisler 14 Chapter 8: Stress, Strain and Deformation in Solids A 2-D geometrical look at xx (defined to be the change in length of a line segment dx which is originally oriented in the x direction) and undergoes displacements ux and uy: y Q* dx* P* ux(x) P x u (x) y dx uy(x+dx) u (x+dx) x Q (x+dx) x 2001, W. E. Haisler 15 Chapter 8: Stress, Strain and Deformation in Solids dx * dx xx = (change in length)/(original length) . dx 2 1/ 2 2 dx* dx u x ( x dx) u x ( x) u y ( x dx) u y ( x) u u dx(1 ) dx( ) x x u u u u dx 1 dx 1 2 x x x x ux dx dx x 2 uy dx x 2 x 2 x y y 2 1/ 2 2 1/ 2 2 1/ 2 x x uy x 2 Note: 1 a 1 (1/ 2)a (for small a). Thus, the last result is approximately: 2 1/ 2 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 16 2 2 u y u u 1 1 dx* dx 1 x x x 2 x 2 x The strain now becomes xx 2 2 u y u u 1 1 dx dx 1 x x x 2 x 2 x dx * dx dx dx 2001, W. E. Haisler 17 Chapter 8: Stress, Strain and Deformation in Solids After canceling the dx terms, the finite strain term becomes ux 1 ux 1 u y xx x 2 x 2 x 2 2 finite strain For small gradients, we assume that the squared terms are small compared to the un-squared terms and we obtain the linear, or small strain expression: ux xx x small strain 2001, W. E. Haisler 18 Chapter 8: Stress, Strain and Deformation in Solids Shear strain (rotation of line segments): dux y Note that 1 u y ux xy = ( ). 2 x y dy dy* dx* Geometrically, each of the dy two terms is an angle as dx shown at the left. xy is called a shear strain and dx geometrically is 1/2 x (average) of the angular rotation of line segments dx & dy which originally form a right duy angle. In contrast, the engineering shear strain xy is defined as u y ux the sum of these two angles, ie, xy = 2 xy = . x y 2001, W. E. Haisler 19 Chapter 8: Stress, Strain and Deformation in Solids The definition of the engineering shear strain xy from a graphical viewpoint is an approximation (similar to the square root approximation made in xx ). From the geometry above, dx * dy* cos * dx * dy* . Define xy to be the sum of the u y ux angular rotations, ie, xy = . (engineering shear strain) x y u y ux cos * cos( / 2 ) sin 2 xy xy x y xy xy As in the square root approximation made for xx (for the geometrical interpretation of strain), an assumption of “small” rotations has been made in defining the shear strain xy . 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 20 Some examples u(x) Consider a bar of lenght L, P fixed at the left end, and with a force P applied at the L right end. The bar stretches uL x an amount uL at the right end. If the “engineering” strain in the x direction is defined to be (change in length)/(original length), then xx = uL/L. We could also find the expresssion for u(x) and apply the mathematical definition of xx . We have two boundary conditions on u(x): u(0)=0 and u(L)= uL. Assume u ( x) C1 C2 x where C1 and C2 are constants. Applying B.C.s gives C1 = 0 and C2 = uL/L so that u(x) = (uL/L) x. Thus the ux strain is given by xx = (uL/L). x 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids Example: At the point "A" shown on the wheel, the displacement field has been determined Point A to be as follows (using the finite element method): u x ( x, y ) (0.38 x 2 1.31xy 0.045 y 2 2.22 x 8.41 y )104 in u y ( x, y ) (0.25 x 2 1.62 xy 1.65 y 2 +3.44 x 7.03 y )104 in u z ( x, y ) 0 Determine the strains at point "A" which is located at x=4in, y=5in. 21 2001, W. E. Haisler 22 Chapter 8: Stress, Strain and Deformation in Solids u x ( x, y ) (0.38 x 2 1.31xy 0.045 y 2 2.22 x 8.41 y )104 in u y ( x, y ) (0.25 x 2 1.62 xy 1.65 y 2 +3.44 x 7.03 y )104 in xx u x x yy xy xz (0.76 x 1.31 y 2.22)104 in / in x 4", y 5" u y y 7.37 x104 in / in x 4", y 5" 2.01x104 in / in x 4", y 5" 1 u x u y 4 3.27 x 10 in / in , Note: xy 2 xy 2 y x x 4", y 5" yz zz 0 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 23 Now, do again, but consider finite strain. Comparing the two results, is it OK to assume small strains for this problem? 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 24 Some Thought Exercises Suppose we have an 8x8 square area outlined on a larger chunk of planar material (like a plate). Suppose the plate is loaded in the x-y plane so that the square is displaced and deformed to a rectangle as shown below [new x-y coordinates starting at lower left corner and going CCW are: (8,4), (20,4), (20,12) and (8,12)]. Picture shows “deformed” and “undeformed” area. What are your guesses for undeformed the strains? There is stretching in the x direction, so xx 0 . There is no stretching in the y direction, deformed so yy 0. All right angles remain right angles, hence there is no shear strain and xy 0 . 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 25 We can actually solve for the displacements and strains since we know the initial and final positions of the 4 corner points. Assume that the displacements are given by (a 2-D curve fit): u x ( x, y ) C1 C2 x C3 y C4 xy u y ( x, y ) C5 C6 x C7 y C8 xy Four constants are chosen because we know information at 4 points. Now apply know conditions for the four corner points: u x (0,0) 8 0 C1 C2 (0) C3 (0) C4 (0)(0) u x (8,0) 20 8 C1 C2 (8) C3 (0) C4 (8)(0) u x (8,8) 20 8 C1 C2 (8) C3 (8) C4 (8)(8) u x (0,8) 8 0 C1 C2 (0) C3 (8) C4 (0)(8) u y (0,0) 4 0 C5 C6 (0) C7 (0) C8 (0)(0) u y (8,0) 4 0 C5 C6 (8) C7 (0) C8 (8)(0) u y (8,8) 12 8 C5 C6 (8) C7 (8) C8 (8)(8) u y (0,8) 12 8 C5 C6 (0) C7 (8) C8 (0)(8) 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 26 In each of the above, the displacement at a point is set equal to the “final position” – “initial position” of that point. Solve for the constants and substitute back into u x and u y to obtain: u x ( x, y ) 8 0.5 x 0 y 0 xy 8 0.5 x u y ( x, y ) 4 0 x 0 y 0 xy 4 Last equation says that displacement of all points in y direction ( u y ) is a constant, which is consistent with the “picture” of deformed and undeformed area. Now calculate the strains: u x xx 0.5 in / in (a positive value indicates stretching) x u y (no stretching in y direction) yy 0 y 1 u x u y xy 0 0 0 (no shear strain) 2 y x 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 27 Suppose we have an 8x8 square area outlined on a larger chunk of planar material (like a plate). Suppose the plate is loaded in the x-y plane so that the square is displaced and deformed to a parallelogram as shown below [new x-y coordinates starting at lower left corner and going CCW are: (8,4), (16,4), (19,12) and (11,12)]. Picture shows “deformed” and “undeformed” area. What are your guesses for the strains? There is no undeformed deformed stretching in the x direction, so xx 0. There is no stretching in the y direction, so yy 0. However, original right angles are no longer right angles, hence there is some shear strain and xy 0 . 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 28 Suppose we have an 8x8 square area outlined on a larger chunk of planar material (like a plate). Suppose the plate is loaded in the x-y plane so that the square is displaced and deformed to a quadrilateral as shown below [new x-y coordinates starting at lower left corner and going CCW are: (9,4), (16.8,6), (17.5, 14.5) and (10.8,12.5)]. Picture shows “deformed” and “undeformed” area. What are your guesses for the strains? It appears that there is shortening or stretching in the x and y direction; hence, xx 0 and yy 0 . Original right angles are no longer right angles, hence there is some shear strain and xy 0 . 2001, W. E. Haisler 29 Chapter 8: Stress, Strain and Deformation in Solids Note on Tensor Stress & Strain Transformation For 2-D, Cauchy's formula provided the following relation: t( n) n The component of t( n ) in the direction of the unit outward normal n of a surface (or in x' direction is: n x ' x ' t( n) n (3.31) y’ t (n ) n’ xx n x’ s t( n) n xy yx yy Substitute Cauchy's formula into the above, and write in both vector and matrix notation: 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 30 n x'x' n n [n] [ ] [ n] (1x 2) (2 x 2) (2 x1) The expression n [n][ ][n] gives the component of stress, n , in the direction of the unit normal n (or in the direction of the x'-axis which makes an angle CCW from the x-axis). Lets do both the vector and matrix operations to show that they are the same. First, Cauchy's formula is t( n) n (cos i sin j ) xx ii yx ji xy ij yy jj ( xx cos xy sin )i ( yx cos yy sin ) j ( xx cos xy sin )i ( xy cos yy sin ) j 2001, W. E. Haisler 31 Chapter 8: Stress, Strain and Deformation in Solids Note yx xy . Now do the remaining vector operation for n to obtain: ( xx cos xy sin )i n x ' x ' t( n) n cos i sin j ( xy cos yy sin ) j cos2 2 sin cos sin 2 xx xy yy If we do this in matrix notion we obtain: xx xy cos n [n][ ][n] cos sin sin yy yx xx cos2 2 xy sin cos yy sin 2 (5.3) 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 32 The above is called the stress transformation equation (see eq. 5.3 in the notes). The stress transformation transforms stresses from an (x,y) coordinate system to an (x',y') system where x' is rotated by an angle CCW from the x-axis. We can similarly show that the strain transformation is given by: n x' x' n n [n] [ ] [ n] (1x 2) (2 x 2) (2 x1) The quantity n is the component of strain in the direction of a unit normal n . n is often called the unit elongation in the n direction (just as xx is the unit elongation in the i or xcoordinate direction). 2001, W. E. Haisler Chapter 8: Stress, Strain and Deformation in Solids 33 Notes: 1. Both [ ] and [ ] are second order tensors. 2. All second order tensors follow the same transformation form in transforming from (x,y,z) to another orthogonal coordinate system (x',y',z'), i.e., n x'x' n n [n][ ][n] and n x' x' n n [n][ ][n] 2001, W. E. Haisler 34 Chapter 8: Stress, Strain and Deformation in Solids 3. The same transformation applies to moments of inertia of a cross-section A (which is also a second order tensor): y’ y x’ I xx y 2dA , I xy xydA, I yy x 2dA A A A With respect to the x'-y' coordinate system at some angle , we have: I x ' x ' ( y ')2 dA A Can also get I x ' x ' by applying the coordinate transformation to the x-y moments of inertia written as a matrix: ( n is unit vector in x' direction): I xx [I ] I yx I xy , then I n I x ' x ' [n][ I ][n] I yy x