Vectors, dot and cross product
advertisement

First year:
(I)
Vectors, dot and cross product
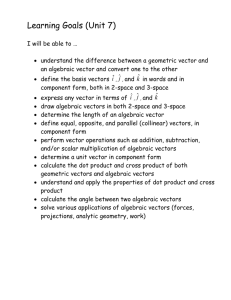
Vectors
The actual definition of vectors and vector spaces is quite theoretical, but as
far as first year maths is concerned, a vector u is something that looks like
that:
x1
x
u 2 .
...
x
n
x1 ,..., xn are the coordinates of the vector u .
x1 ,..., xn are real or complex numbers, but for the moment we suppose that
they are real.
In practice you will only have to deal with vectors having only two or three
coordinates, but we will stick to the notation above in order to avoid saying the
same thing twice for n 2 and n 3 .
Two-dimensional vectors belong to R2 and three-dimensional vectors belong
to R3.
Let’s see how two-dimensional vectors work:
2
3
1
2
Let u1 , u 2 , u3 and u 4 . See if you can spot those
3
2
1
1
vectors on the graph below:
Three-dimensional vectors are a bit trickier to plot.
2
3
1
2
Let v1 3 , v2 2 , v3 1 and v4 1 .
3
3
4
4
The extra dimension makes them harder to spot:
A set S {u1 ,..., uk } of vectors is said to be linearly independent if
1u1 ... k uk 0 implies 1 ... n 0 .
1
0
2
For example, let u1 , u 2 and u3 . Then
0
1
3
0
2u1 3u 2 u3
0
so that S {u1 , u 2 , u3 } is not linearly independent. On the other hand, the set
{u1 , u2 } is linearly independent since
0
1u1 2u 2 1 implies 1 2 0 .
2 0
The fact that a set is not linearly independent means that some vectors in the
set can be expressed as linear combinations of other vectors in the set. For
example S (as above) is not linearly independent and
u3 2u1 3u 2 .
A basis for Rn ( n 2 or n 3 ) is a set of n linearly independent vectors.
For example {u1 , u2 } (as above) is a basis for R2 since {u1 , u2 } consists of two
linearly independent vectors.
If a set S of vectors is a basis for Rn, then every vector in Rn can be written as
a linear combination of vectors in S .
(II)
Dot product
The dot product is also sometimes called the scalar product.
x1
y1
x2
y
Let u and v 2 .
...
...
x
y
n
n
The dot product of u and v is
u v x1 y1 x2 y2 ... xn yn .
1
4
For example, say u 2 and v 5 . Then u v 1 4 2 5 3 6 32.
3
6
It is important to keep in mind that the dot product of two vectors is a number
and not a vector.
Two vectors u and v are said to be orthogonal if u v 0 .
2
1
2
. Then u v 2 1 3 0.
For example, let u and v
3
3
2 / 3
If you plot u and v , it becomes rather obvious that they are orthogonal:
Given a linearly independent set of vectors {u1 , u 2 ,..., u n } in Rn, it is possible to
turn it into an orthogonal set (i.e. a set where the vectors are orthogonal to
each other) using the Gram-Schmidt process.
Gram-Schmidt process:
Take the first vector in your set, in this case u1 and call it v1 (just to initiate the
process). Then set
e1
v1
v1 v1
e1 is the first vector in your orthogonal set.
Now set
v2 u2 (u2 v1 )v1 and e2
v2
.
v2 v2
e2 is the second vector in your orthogonal set.
For the third vector we proceed similarly:
v3 u3 (u3 v1 )v1 (u3 v2 )v2 and e3
v3
.
v3 v3
Etc…
If you like formulae, the following one gives you the k th vector of the
orthogonal set
vk uk (uk v1 )v1 (uk v2 )v2 ... (uk vk 1 )vk 1 and ek
vk
vk vk
1
2
For example, let’s take u1 , and u 2 .
0
3
Set v1 u1 . Since v1 v1 1 , we can also set e1 u1.
Now, set v2 u2 (u2 v1 )v1 . We have u2 v1 1 2 0 3 2 so that
0
2 1 0
v
v2 2 and e2 2 .
32 1
3 0 3
.
(III)
Cross Product
When it comes to the cross product, we have to take n 3 , i.e. we consider
three-dimensional vectors.
1
0
0
Let i 0 , j 1 and k 0 . {i, j, k} is a basis, so every vector in R3 can be
0
0
1
described as a linear combination of the vectors in the basis. Namely, if
x1
u x2 then u x1 i x2 j x3 k .
x
3
The cross product of two vectors u and v is a vector that is orthogonal to both
u and v and, more precisely, the cross product of u and v is given by the
following formula:
x1
y1
x
u x2 , v y 2 u v i 2
y2
x
y
3
3
x3
y3
j
x1
x3
y1
y3
k
x1
x2
y1
y2
.
There is a trick to remember the formula for the cross product:
i
u v x1
y1
j
x2
y2
k
x3
y3
you can treat the right-hand side like the determinant of a 3 3 matrix and
expand with respect to the first row. Of course, this is just a trick, not a proper
formula.
For example, take
i j k
1
1
0
u 0 and v 1 . Then u v 1 0 1 i j k 1.
1
1
1
0 1 1
Check that u (u v) 0 and that v (u v) 0 , so that u v is indeed
orthogonal to both u and v .
With three vectors u, v and w , you can form w (u v ) . This dot-cross product
is sometimes called the triple product.
z1
x1
y1
z1
If u x2 , v y 2 and w z 2 , then w (u v) x1
x
y
z
y1
3
3
3
z2
x2
z3
x3 .
y2
y3