Chapter 16
advertisement

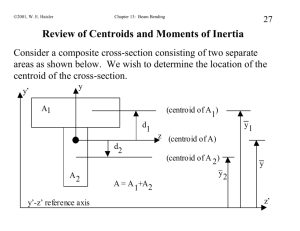
Chapter 21. 3-D Kinetics of a Rigid Body Basic Questions 1. What is the origin of 3D motion of a rigid body? - m, p , F (Translation) and I, H , M (Rotation) 2. How to establish the equations of motion of a body in 3-D motion? 3. How to establish the energy and momentum principles? Equations of motion for a rigid body in 3-D motion d mv dp 1. Translation: F dt dt Mass m: Resistance to F d I dH 2. Rotation: M dt dt Moment of inertia I: Resistance to M (2-D motion) or Inertia tensor I in 3-D motion Inertia Tensor (Moments of inertia + Products of inertia) : Depending on the shape of body, axes and planes of rotation 1. Moments of Inertia (Mass distribution about a reference axis) Moment of inertia for a differential element dm dm r 2 (r: Shortest distance from dm to the reference axis) e.g. About x axis, dI xx rx2dm ( y 2 z 2 )dm z where rx 2 y 2 z 2 : Distance from dm to x axis dm z y x Moment of inertia of a whole body about x, y, z axes I xx rx2 dm ( y 2 z 2 )dm > 0 (Positive) m m I yy ry2 dm ( x 2 z 2 )dm > 0 (Positive) m m I zz rz2 dm ( x 2 y 2 )dm > 0 (Positive) m m x y 2. Products of Inertia (Mass distribution about reference planes) Product of inertia for a differential element dm dm r1r2 ( r1, r2 : Shortest distances from 2 orthogonal planes to dm) e.g. About y-z and x-z planes, dI xy xydm dI yx where x (y): Distance from dm to y-z (x-z) plane z dm z y x x y Products of inertia Ixy, Iyz, Izx of total body about x-y, y-z, z-x planes I xy I yx xy dm > 0 or < 0 or = 0 m I yz I zy yz dm > 0 or < 0 or = 0 m I xz I zx xz dm > 0 or < 0 or = 0 m The sign of a Product of inertia depends on the symmetry of mass distribution about its orthogonal planes. 3. Inertia tensor - Inertial property of a rotating body in 3D motion Definition: I xx I I yx I zx I xy I yy I zy I xz I yz I zz If the body shape is symmetry about x-y, y-z, and x-z planes, All products of inertia = 0, i.e. I xx I 0 0 0 I yy 0 0 0 : Diagonalized tensor I zz Ix = Ixx, Iy = Iyy, Iz = Izz : Principal moments of inertia a 4. Moment of inertia about an arbitrary axis of rotation z Z If, tensor I about xyz reference frames: Known dm Q: What is the moment of inertia about an r arbitrary Oa axis along an unit vector û a ? ua b = r sin O x Moment of inertia for a differential element dm, = dm b 2 [b: the shortest (perpendicular) distance from dm to Oa] ( b r sin uˆa r ) By definition of moment of inertia, 2 I Oa m b 2 dm uˆa r dm m uˆa r uˆa r dm m where uˆa u xiˆ u y ˆj u z kˆ and r xiˆ yˆj zkˆ uˆa r (u y z u z y )iˆ (u z x u x z ) ˆj (u x y u y x)kˆ Then, I Oa [(u y z u z y ) 2 (u z x u x z ) 2 (u x y u y x) 2 ]dm m u x 2 ( y 2 z 2 )dm u y 2 ( z 2 x 2 )dm u z 2 ( x 2 y 2 )dm m m m 2u x u y xydm 2u y u z yzdm 2u z u x zxdm m m m I Oa I xxu x 2 I yy u y 2 I zz u z 2 2 I xyu xu y 2 I yz u y u z 2 I zx u z u x where u x , u y , u z : Direction cosines of x y z axes y 5. Parallel-axis and Parallel-plane theorems If Moments and Products of inertia about G (Mass center) & Position of G (xG, yG, zG) about the axes of interest: Known Moments of Inertia Ixx = (Ix’x’)G + m(yG2 + zG2) Iyy = (Iy’y’)G + m(xG2 + zG2) : Parallel-axis theorem Izz = (Iz’z’)G + m(xG2 + yG2) Products of Inertia Ixy = (Ix’y’)G + mxGyG Iyz = (Iy’z’)G + myGzG : Parallel-plane theorem Izx = (Iz’x’)G + mzGxG z’ z G y’ x’ zG y xG x yG Angular momentum, H z Consider a rotating rigid body with v x’ rA Q: What is the angular momentum about a point A? G dm A A y x Let XYZ be the inertial frame of reference Differential angular momentum of a differential element dm about A = dH A A v dm where A : Position vector from A to dm v : Velocity of dm in the XYZ Since v v A A from 3-D kinematics, dH A A (v A A )dm A v Adm A ( A )dm Total angular momentum of a whole body HA A v A dm A ( A )dm m m Adm v A A ( A )dm m m : General expression of Angular momentum Angular momentum of a body for special cases (Point O) i.e. v A 0 (1) Point A is Fixed H O O ( O )dm m (2) Point A is a Mass Center (Point G) i.e. G dm = 0 m H G G ( G )dm m (3) Arbitrary Point A H A Adm v A A ( A )dm m m G / A mvG H G (See Prob. 21-22) where G / A : Position vector from A to G vG : Velocity of G in the XYZ Rectangular components of H H ( )dm For a fixed point A, m Q: Express H , and in terms of x, y, z components. H xiˆ H y ˆj H z kˆ ( xiˆ yj zk ) [( xiˆ y ˆj z kˆ) ( xiˆ yˆj zkˆ)]dm m = [ x ( y 2 z 2 )dm y xydm z xzdm] iˆ m m m + [ x xydm y ( x 2 z 2 )dm z yzdm] ˆj m m m + [ x zxdm y yzdm z ( x 2 y 2 )dm]kˆ m m m ( I xxx I xy y I xzz )iˆ ( I yxx I yy y I yzz ) ˆj ( I zx x I zy y I zz z )kˆ Rectangular components of H x component : Hx = Ixxx – Ixyy - Ixzz y component : Hy = -Iyxx + Iyyy - Iyzz z component : Hz = -Izxx – Izyy + Izzz If x y z axes: Principal axes of inertia, i.e. all products of inertia = 0 Hx = Ixx Hy = Iyy Hz = Izz (Same as 2-D motion)