A.3.2.4
advertisement

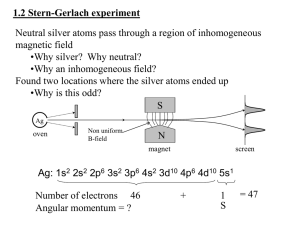
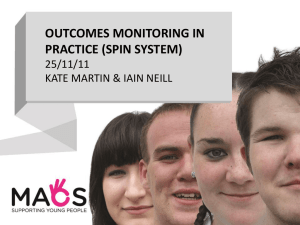
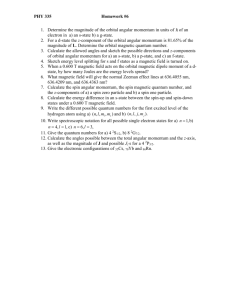
A.3.2.4 Spin Stabilization 1 A.3.2.4 Spin Stabilization of Launch Vehicle Third Stage A.3.2.4.1 Introduction We leave the third stage without any active control, placing the majority of the avionics in the second stage and subsequently causing a large reduction in cost for the launch system. Thrust misalignment within the solid rocket motor and center of mass offset still present instability problems that we must address. Thus we decide to spin stabilize the third stage, much like a football quarterback spinning the ball during a pass to ensure that it reaches the receiver just in time for the game winning touchdown. We introduce a specialized adapter called a spin table between the second and third stages, allowing the third stage to spin freely. At the appropriate time, transversely mounted thrusters are activated to achieve the required spin rate. The technique of spin stabilization nearly eliminates thrust offset instability and greatly reduces final pointing error during the burning of solid rocket motors. Through communication with A. Guzik in the Trajectory group, we determine that an acceptable final pointing error for the third stage will be no more than 1o from the nominal pointing value for each payload. Using analysis methods developed by Longuski, we develop MATLAB codes that numerically predict pointing errors associated with both the spinning up of the third stage and the thrusting of the third stage.1 These codes are named AAE450_DNC_spin_offset and Spin_Rate respectively. We create the codes based on a further simplification of the equations of motion as detailed in section A.3.2.1, namely the aerodynamic forces have been eliminated and the spinning-up and the thrusting maneuvers are separate so that the spin moment and the thrust force are not applied at the same time. While we can calculate the velocity pointing error directly for certain cases, we can also calculate the pointing error from the pointing error of the angular momentum vector. Both methods are used to analyze the thrusting maneuver, while only the angular momentum method is used to analyze the spin-up maneuver. Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 2 In Figure A.3.2.4.1.1, we sketch the free body diagram of the third stage, with associated body fixed unit vector basis r̂ . Let us note that the weight force causes a negligible moment about the body center of mass, while the thrust force causes a much larger scale moment. Any pointing error associated with the gravitational moment will be very small in comparison to the error from thruster offset, especially over the short duration of the thruster burn. Thus we neglect the gravity force from the derived equations of motion. Figure A.3.2.4.1.1: Simplified free body diagram of third stage with spin moment and thrust vector. (Author: Jeffrey Stuart) A.3.2.4.2 Thrusting Maneuver Analysis of the thrusting maneuver is complicated by the changing position of the center of mass along the rocket axis of symmetry and the time dependence of the moments of inertia. We use Euler’s equations of motion detailed in Eq. A.3.2.4.2.1-A.3.2.4.2.3 and the definition of angular momentum (Eq. A.3.2.4.2.4) to numerically calculate time histories of the angular velocity and momentum in the body-fixed frame. M 1 I 1 1 I11 ( I 3 I 2 ) 2 3 A.3.2.4.2.1 M 2 I 2 2 I2 2 ( I 1 I 3 )31 A.3.2.4.2.2 M 3 I 3 3 I3 3 ( I 2 I 1 )1 2 A.3.2.4.2.3 where M is the moment about one of the body axes, I is the moment of inertia, and ω is the angular velocity. Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 3 H i I i i A.3.2.4.2.4 where H is the angular moment in the body fixed frame, I is the moment of inertia, and ω is the angular velocity. Additionally, we derive equations for the change in velocity from Newton’s Second Law, which will be used to calculate the velocity pointing error. Equation A.3.2.4.2.5 summarizes these relations for the inertial accelerations and an Euler 3-1-2 rotation. Note for simplicity that we assume the thrust is offset in only one of the transverse body axes. a X c3 c2 s1 s 2 s3 a s c s s c Y 3 2 1 2 3 a Z s 2 c1 s3 c1 c3 c1 s1 c3 s 2 s1c2 s3 T sin( ) / m s3 s 2 s1c 2 c3 0 T / m c1c2 A.3.2.4.2.5 where T is the thrust, χ is the angular offset to the thrust vector, m is the instantaneous mass and a is the components of the inertial acceleration. Using Eq. A.3.2.4.2.4 and the Euler 3-1-2 rotation, we arrive at the relation between inertial and body-fixed angular momentum in Eq. A.3.2.4.2.6. H X c3 c2 s1 s 2 s3 H s c s s c Y 3 2 1 2 3 H Z s 2 c1 s3 c1 c3 c1 s1 c3 s 2 s1c2 s3 I 11 s3 s 2 s1c 2 c3 I 2 2 I 33 c1c2 A.3.2.4.2.6 where s and c are sine and cosine of the associated Euler angles, and the X,Y,Z subscripts denote inertial unit vectors initially aligned with the 1,2,3 body-fixed unit vectors respectively. Discovering these quantities is useful in that it now allows us to calculate the pointing error from relations as noted by Longuski, namely those presented in Eq. A.3.2.4.2.7A.3.2.4.2.8.1 X H X / HZ A.3.2.4.2.7 Y H Y / H Z A.3.2.4.2.8 where ρ is the inertial pointing error and H is the inertial angular velocity. For this analysis, we make the simplifying assumption that there is only one moment caused by thruster offset, given by Eq. A.3.2.4.2.9. M 1 T ( L d cm ) sin( ) Author: Jeffrey Stuart A.3.2.4.2.9 A.3.2.4 Spin Stabilization 4 where M is the moment, T is the thrust, L is the total length of the third stage from the forward tip, dcm is the displacement of the center of mass from the forward tip, and χ is the angular offset to the thrust vector. From research conducted by N. Wilcox, the 3σ thrust offset χ is a constant 0.5871o for all solid motors. Because the plots for each case are so similar, only the results from the 5kg payload are discussed visually, while the plots for the 200g and 1kg payloads are placed at the end of this section. Unless explicitly stated otherwise, any observation made about the 5kg plots also applies to the 1kg and 200g payload cases. Figure A.3.2.4.2.1 shows the angular momentum thrusting error plot for the full burn time. The large band we see is in fact a spiral starting at the origin and moving inward toward the point (0.05,0.75). This spiraling behavior is in large part a consequence of the non-constant center of mass with additional influence from the changing moments of inertia. 1.5 Hy/Hz (deg) 1 0.5 0 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 Hx/Hz (deg) Figure A.3.2.4.2.1: Third stage pointing error for 5kg payload over full burn time (Author: Albert Chaney) Though this plot provides information for the full burn time, the true area of interest is the behavior during the final few seconds of the burn, which we have plotted in Fig. A.3.2.4.2.2. We can find the final pointing error much easier from this plot than from Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 5 Fig. A.3.2.4.2.1. The final pointing error is found by simply finding the magnitude of the vector from the origin (marked by an asterisk) to the center of the circle formed by the pointing error curve. While visual methods of calculating this displacement are somewhat subjective, we can mitigate these effects by ensuring that the pointing error is well below the limit of 1o. As we can see in Fig. 3.2.4.2.2, the final pointing error is approximately 0.75o for a spin rate of 200rpm. 0.8 0.7 Hy/Hz (deg) 0.6 0.5 0.4 0.3 0.2 0.1 0 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 Hx/Hz (deg) Figure A.3.2.4.2.3: Third stage pointing error for 5kg payload during last few seconds of burn time (Author: Albert Chaney) To complete the analysis, we also compare the results from the angular momentum method to the results for the direct calculation method. We plot the results for the direct calculation in Fig. A.3.2.4.2.4. The pointing error traces out a large scale spiral from the beginning of the burn to the end of the burn. The smaller oscillations about the spiral are caused by the non-constant inertias and center of mass location. As we can see, the final velocity pointing error is approximately 0.77o for the same spin rate of 200rpm. Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 6 0.9 0.8 0.7 vY/vZ (deg) 0.6 0.5 0.4 0.3 0.2 0.1 0 -0.2 0 0.2 0.4 0.6 0.8 vX/vZ (deg) Figure A.3.2.4.2.4: Third stage pointing error for 5kg payload calculated directly from numerically integrated velocities. (Author: Jeffrey Stuart) 3.2.4.3 Spin-Up Maneuver While the spinning-up maneuver is not complicated by non-constant moments of inertia, we still developed the code under the assumption that such analysis would at some point be useful, which is why all equations presented here include terms for varying moments of inertia. Additionally, rather than calculate Euler angles and use them to calculate the elements of a direction cosine matrix, the elements of the direction cosine matrix were directly calculated from differential relations. We also simplify Euler’s equations to arrive at the differential equations A.3.2.4.3.1-A.3.2.4.3.3. P I 1 1 I11 ( I 3 I 2 ) 2 3 A.3.2.4.3.1 0 I 2 2 I2 2 ( I 1 I 3 )1 3 A.3.2.4.3.2 S I 3 3 I3 3 A.3.2.4.3.3 where S is the applied spin moment, P is the moment caused by thruster misalignment (again assumed to be 0.5871o). Using the same techniques as for the thrusting maneuver angular momentum method, we determine the pointing error associated with the spinning-up maneuver. Author: Jeffrey Stuart In Fig. A.3.2.4 Spin Stabilization 7 A.3.2.4.3.1, we plot the pointing error for the entire spin-up maneuver. From visual inspection of this figure and Fig. A.3.2.4.2.3, we can see that the pointing error associated with the thrusting maneuver is much larger than the pointing error from the spinning-up maneuver. This is as we expect, for two reasons: first, the thrusting maneuver is of a much longer duration than the spinning-up maneuver, and second, the thrusting maneuver also has higher destabilizing moments than the spinning up maneuver. 0.3 0.25 Hy/Hz (deg) 0.2 0.15 0.1 0.05 0 -0.05 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 Hx/Hz (deg) Figure A.3.2.4.3.1: Pointing error from spinning-up maneuver of third stage, 5kg (Author: Jeffrey Stuart) There are several other constraints on the spin-up maneuver besides the goal of attaining the needed spin rate for the thrusting maneuver. One major constraint that we face is the structural limitations of the launch vehicle itself. From data provided by the S. Izzo in the Structures group, we know that the maximum acceptable angular acceleration is 170rpm per second. Another constraint is that we must keep the mass of the spin up system as low as possible to remain within the constant mass and inertia assumption from the analysis. This constraint on the size will also necessitate that the spin up thrusters be relatively low power. Within AAE450_DNC_spin_offset, we can select the spin moment and the duration of the spin up maneuver to satisfy these constraints. We calculate the needed thrust from the spin moment and the diameter of the third stage, assuming two small solid motors are used for the spin-up. Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 8 Figure A.3.2.4.3.2 contains plots for the angular velocities about the body-fixed axes r̂ . We note that the scale for ω3 is in revolutions per minute while the scales for ω1 and ω2 are in radians per second. The dotted line in the plot of ω3 is the desired angular velocity for the thrusting maneuver. The plots of ω1 and ω2 indicate that they are sinusoidal in nature of the form given by Eqs. A.3.2.4.3.4 and A.3.2.4.3.5. Angular Velocity, rpm Omega 3 300 200 Burn 200 rpm 100 0 0 0.5 1 1.5 2 -3 1 2.5 3 3.5 4 4.5 5 3 3.5 4 4.5 5 3 3.5 4 4.5 5 Omega 1 x 10 0.5 Angular Velocity, rad/sec 0 -0.5 -1 0 0.5 1 1.5 2 -3 1 2.5 Omega 2 x 10 0.5 0 -0.5 -1 0 0.5 1 1.5 2 2.5 Time, sec Figure A.3.2.4.3.2: Body-fixed angular velocities during spin-up maneuver, 5kg (Author: Jeffrey Stuart) 1 A sin( Kt 2 ) B cos( Kt 2 ) A.3.2.4.3.4 2 C sin( Kt 2 ) D cos( Kt 2 ) A.3.2.4.3.5 where ω is the angular velocity, K is a constant determined by the inertia properties, and A, B, C, and D are constants determined by the initial conditions. A.3.2.4.4 Results In Table A.3.2.4.4.1, we have summarized the required spin rate, spin-up thrust, and pointing errors for all three payload cases. As is expected from the similar size of the third stages, the required thrust and spin-up times are quite close across all three designs. Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 9 Additionally, we satisfy the constraints by noting that the needed thrust from the spin-up motors is less than 10 Newtons, while the required burn time is typically about 4.5 seconds. For all cases, the total pointing error is less than 0.9o, less than the required 1o. We also note that the angular acceleration is well below the structural limit. Table A.3.2.4.4.1 Third Stage Spin Results Payload 200g 1kg 5kg Spin rate 180 200 200 Spin moment 2.00 2.25 2.15 Thruster average force 7.35 7.76 7.82 Spin-up time 4.13 4.53 4.49 Spin-up pointing error 0.05 0.05 0.05 Thrusting pointing error 0.82 0.82 0.75 Total pointing error 0.87 0.87 0.80 Pointing error limit 1.00 1.00 1.00 Angular acceleration 43.62 44.15 44.55 Max angular accel 170.00 170.00 170.00 Units rpm N-m N sec deg deg deg deg rpm/sec rpm/sec When we inspect the results, we come to the startling and rather amusing realization that the results for the spin thrusters are in fact rather close to the performance characteristics of low powered solid grain model rocket motors. Provided in Table A.3.2.4.4.2, we have the performance characteristics of one such motor, the Estes E9.2 Though the idea seems almost ludicrous at first, when we stop to consider the actual sizes of the third stages we quickly realize that these motors are at least on the right scale of what we will need for the physical rocket. We will have to design and build a system that is much more reliable than the average model rocket motor, but we expect the resulting design to be very similar to what we see in the low powered rocket community. Table A.3.2.4.4.2 Estes E9 Performance Data Total Impulse: 27.87 N-sec (σ = 0.42) Peak Thrust: 19.47 N-sec (σ = 1.25) Burn Time: 3.09 sec (σ = 0.06) Average Thrust: 9.02 N-sec Propellant Mass: 35.80 g Inert Mass: 22.10 g Price $15.19 Per 3 pack Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 10 A.3.2.4.5 Conclusions The analysis presented here shows the characteristics of the spin-stabilized third stage of our three launch vehicles. As designed, the third stage will have a velocity pointing error of no more than 1o from the nominal and will undergo angular accelerations well below structural failure values. The launch vehicle now has a viable scheme for removing the avionics package from the third stage while still maintaining the required trajectory and achieving the required orbit. Though the work presented here is complete in and of itself, we can identify several aspects that can be developed further: 1. The effect of a non-constant center of mass and moments of inertia can be more fully investigated, in particular for the spin-up maneuver. 2. Longuski and Javorsek present methods for reducing pointing error using specialized burning schemes.1,3 These techniques can be investigated further for application to the launch vehicle design. 3. We have only simplified designs for the spin-up thrusters and spin table, designs which must be more fleshed out to be truly viable. References 1. Longuski, J.M., Kia, T., and Breckenridge, W.G. “Annihilation of Angular Momentum Bias During Thrusting and Spinning-up Maneuvers,” The Journal of the Astronautical Sciences, Vol. 37, No. 4, Oct-Dec 1989, pp. 433-450. 2. “Estes E9,” National Association of Rocketry Standards and Testing [online], 2001, URL: http://www.nar.org/pdf/Estes/E9.pdf 3. Javorsek, D., and Longuski, J.M. “Velocity Pointing Errors Associated with Spinning Thrusting Spacecraft,” Journal of Spacecraft and Rockets, Vol. 37, No. 3, May-June 2000, pp. 359-365. Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 11 A.3.2.4.6 Accessory Plots for 200g Launch Vehicle 1.6 1.4 Hy/Hz (deg) 1.2 1 0.8 0.6 0.4 0.2 0 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Hx/Hz (deg) Figure A.3.2.4.6.1: Third stage pointing error for 200g payload over full burn time (Author: Albert Chaney) 0.9 0.8 Hy/Hz (deg) 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 -0.4 -0.2 0 0.2 0.4 0.6 Hx/Hz (deg) Figure A.3.2.4.6.2: Third stage pointing error for 200g payload during last few seconds of burn time (Author: Albert Chaney) Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 12 1 0.9 0.8 vY/vZ (deg) 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 -0.2 0 0.2 0.4 0.6 0.8 vX/vZ (deg) Figure A.3.2.4.6.3: Third stage pointing error for 200g payload calculated directly from numerically integrated velocities. (Author: Jeffrey Stuart) 0.35 0.3 Hy/Hz (deg) 0.25 0.2 0.15 0.1 0.05 0 -0.3 -0.2 -0.1 0 0.1 0.2 Hx/Hz (deg) 0.3 0.4 0.5 0.6 Figure A.3.2.4.6.4: Pointing error from spinning-up maneuver of third stage, 200g (Author: Jeffrey Stuart) Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 13 Angular Velocity, rpm Omega 3 200 150 100 Burn 180 rpm 50 0 0 0.5 1 1.5 2 Angular Velocity, rad/sec -3 1 2.5 3 3.5 4 4.5 3 3.5 4 4.5 3 3.5 4 4.5 Omega 1 x 10 0.5 0 -0.5 -1 0 0.5 1 1.5 2 -3 1 2.5 Omega 2 x 10 0.5 0 -0.5 -1 0 0.5 1 1.5 2 2.5 Time, sec Figure A.3.2.4.6.5: Body-fixed angular velocities during spin-up maneuver, 200g (Author: Jeffrey Stuart) A.3.2.4.7 Accessory Plots for 1kg Launch Vehicle 1.6 1.4 Hy/Hz (deg) 1.2 1 0.8 0.6 0.4 0.2 0 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Hx/Hz (deg) Figure A.3.2.4.7.1: Third stage pointing error for 1kg payload over full burn time (Author: Albert Chaney) Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 14 0.9 0.8 Hy/Hz (deg) 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 -0.4 -0.2 0 0.2 0.4 0.6 Hx/Hz (deg) Figure A.3.2.4.7.2: Third stage pointing error for 1kg payload during last few seconds of burn time (Author: Albert Chaney) 1 0.9 0.8 vY/vZ (deg) 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 -0.2 0 0.2 0.4 0.6 0.8 vX/vZ (deg) Figure A.3.2.4.7.3: Third stage pointing error for 1kg payload calculated directly from numerically integrated velocities. (Author: Jeffrey Stuart) Author: Jeffrey Stuart A.3.2.4 Spin Stabilization 15 0.3 0.25 Hy/Hz (deg) 0.2 0.15 0.1 0.05 0 -0.05 -0.3 -0.2 -0.1 0 0.1 0.2 Hx/Hz (deg) 0.3 0.4 0.5 0.6 Figure A.3.2.4.7.4: Pointing error from spinning-up maneuver of third stage, 1kg (Author: Jeffrey Stuart) Angular Velocity, rpm Omega 3 300 200 Burn 200 rpm 100 0 0 0.5 1 1.5 2 Angular Velocity, rad/sec -3 1 2.5 3 3.5 4 4.5 5 3 3.5 4 4.5 5 3 3.5 4 4.5 5 Omega 1 x 10 0.5 0 -0.5 -1 0 0.5 1 1.5 2 -3 1 2.5 Omega 2 x 10 0.5 0 -0.5 -1 0 0.5 1 1.5 2 2.5 Time, sec Figure A.3.2.4.7.5: Body-fixed angular velocities during spin-up maneuver, 1kg (Author: Jeffrey Stuart) Author: Jeffrey Stuart