General derivation: Conservation of Angular Momentum
advertisement

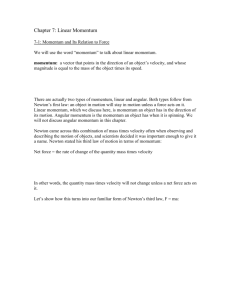
D:\687321514.doc p. 1 of 4 Conservation of Angular Momentum traction on +j surface linear momentum out (x+x,y+y) j (x,y+y) linear momentum in linear momentum out system body force -i traction on -i surface i traction on +i surface y (x,y) (x+x,y) x -j traction on -j surface linear momentum in Figure 3.14: Schematic of Conservation of Linear Momentum for 2-D Region control volume Assume the thickness of this region = z There is a lot going on......... let's simplify by looking at one face in detail & then repeat for the remaining faces (we will also consider the effect of the body force). y, j mass flux y y body force x r (x,y) x angular momentum = r x (linear momentum) x, i z traction vector D:\687321514.doc p. 2 of 4 How is the angular momentum of the control volume affected by what is happening on the right face and the body forces? What can affect the angular momentum in the control volume? mass flux into or out of the control volume body forces acting on the mass in the control volume tractions (force/unit area) acting on the boundaries of the control volume Let's consider each effect during a time period t 1. Effect of mass flux into or out of the control volume For any face: mass flux out = v n For this particular face, mass flux out = vx since n iˆ The mass has angular momentum => when it leaves, so does some AM angular momentum r mass v angular momentum per unit mass r v Therefore the angular momentum flux out for this face = vx r v The angular momentum leaving during t is vx r v y z t 2. Effect of body forces acting on the mass in the control volume Recall: moment * t= change in angular momentum Moment r Fdue to body force r volume density body force / unit mass vector r x y z g Therefore, the increase in linear momentum due to the body force = r x y z g t 3. Effect of tractions acting on the boundaries of the control volume For any face: Fdue to traction area (traction vector ) Moment r Fdue to traction r y z t(i ) Therefore, the increase in linear momentum due to the surface traction vector = r y z t(i ) t D:\687321514.doc p. 3 of 4 If you compare this to what we obtained when deriving conservation of linear momentum, you will see that all the linear momentum terms are simply replaced by r (linear momentum term) ... so if we repeat the same steps that we used when deriving COLM, we might expect to obtain the following r t( j ) (r vx v ) (r v y v ) r t(i ) (r v ) r g t x y x y which is the COLM equation with the linear momentum terms replaced by r (linear momentum term) From text Expand the partial derivatives of the product terms to obtain: r r r r vy v v r v vx v + vz v t t z y x r vx v r v y v r vz v x y z t (i ) t (j) t (k ) r r r t (j) t (i ) t (k ) r y z x z y x (4.3) r g Conservation of linear momentum is given by (4.1) above. Note that the doubleunderlined terms in equation (4.3) are exactly equal to r (linear momentum) and hence can be eliminated from (4.3). Assume that the position vector r is fixed relative r 0 . Equation (4.3) then reduces to: to time so that t r r r 0= vy v vx v vz v z y x r r r t (j) t (i ) t (k ) x z y Recall that the position vector for differential volume located at (x,y,z) is given by: (4.4) D:\687321514.doc p. 4 of 4 r xi yj zk r r r i , j, k x y z (4.5) Using (4.5), equation (4.4) becomes 0 i vx v j v y v k vz v i t (i ) j t (j) k t (k ) (4.6) Expanding the cross-product of the terms in brackets shows that the term in brackets is zero, illustrated by eqn. 4.7 vx v y k vx vz j v y vx k v y vz i vz vx j vz v y i (vx v y - v y vx )k (vx vz vz vx ) j (v y vz vz v y )i 0 (4.7) Therefore, equation (4.6) reduces to 0 = i t (i ) j t (j) k t (k ) (4.8) Cauchy’s formula, equation (3.32), which relates tractions to stresses, can now be substituted into equation (4.8) to obtain: 0 = i i xx j xy k xz j i yx j yy k yz k i zx j zy k zz (4.9) Carrying out the cross-products yields: 0 = k xy j xz k yx i yz j zx i zy or 0 = ( xy yx )k ( xz zx ) j ( yz zy )i (4.10) From equation (4.10), observe that conservation of angular momentum is satisfied if and only if the coefficients of the unit vectors are zero. Thus, one obtains three relations that must be satisfied: Conservation of Angular Momentum Requirement xy yx , yz zy , zx xz From this result, one can tell that the stress tensor is symmetric, meaning that there are only six independent components. These are xx, yy, zz, xy (or yx), xz (or zx), and yz (or zy). (4.11)