3rd Ankara International Aerospace Conference
advertisement

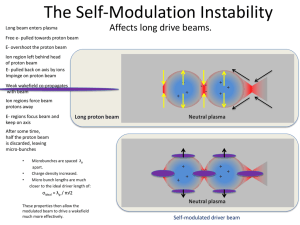
4. ANKARA INTERNATIONAL AEROSPACE CONFERENCE 27-29 September, 2007 - METU, Ankara AIAC-2007-000 FLEXURAL–TORSIONAL COUPLED VIBRATION ANALYSIS OF A ROTATING CLOSED SECTION COMPOSITE TIMOSHENKO BEAM BY USING DTM O. Ozdemir Ozgumus 1, M. O. Kaya2 Istanbul Technical University, Faculty of Aeronautics and Astronautics, Istanbul, Turkey ABSTRACT This study introduces the Differential Transform Method (DTM) to analyse the free vibration response of a rotating, closed section, composite, Timoshenko beam which features material coupling between flapwise bending and torsional vibrations due to ply orientation. The governing differential equations of motion are derived using Hamilton’s principle and solved by applying DTM. The natural frequencies are calculated and the effects of the bending-torsion coupling, the slenderness ratio and several other parameters on the natural frequencies are investigated using the computer package, Mathematica. Wherever possible, comparisons are made with the studies in open literature. COMPOSITE BEAM MODEL A straight composite beam with length L , height h and breadth b is shown in Fig. 1. In the righthanded Cartesian coordinate system, the x -axis is the centroidal axis of the beam. The flapwise displacement, w( x, t ) and the torsional rotation, ( x, t ) occur about the y -axis and the x -axis, respectively. Here, x and t , respectively denote the spanwise coordinate and the time. The beam rotates with a constant angular velocity, . Since the cross-sections of the beam have symmetry in both planes, the x -axis is also the locus of the geometric shear centers of the beam cross-sections. Therefore, the beam features material coupling between flapwise bending and torsional vibrations only due to ply orientation. z y R h L x b Figure 1. Configuration of a Uniform, Rotating, Composite, Timoshenko Beam 1 2 Research Assistant in Aeronautics Department, E-mail: ozdemirozg@itu.edu.tr Associate Professor in Aeronautics Department, E-mail: kayam@itu.edu.tr AIAC-2007-000 Ozdemir Ozgumus, Kaya FORMULATION Potential and Kinetic Energy Expressions The total potential energy expression, U is given by Ref.[1] and derivation of the kinetic energy expression, is made in this study. As a result, the following expressions are obtained for a rotating, composite Timoshenko beam L 1 2 2 2 2 2 U EI y T w I A 2K kAGw GJ dx 20 L 1 Aw 2 I 2 2 I z I y 2 2 2 2 2 dx 20 (1a) (1b) x and time t , respectively. is the material density; A is the cross sectional area; A is the mass per unit length, I y and I z are the second moments of inertia of the beam cross section about the y and z axes respectively; I is the polar mass moment of inertia per unit length about the x axis; EI y , GJ , K and kGA are the flapwise where primes and dots denote differentiation with respect to spanwise coordinate Here bending rigidity, torsional rigidity, bending–torsion coupling rigidity and shear rigidity of the composite beam, respectively. Governing Equations of Motion The governing differential equations of motion and the associated boundary conditions are obtained applying the Hamilton’s principle to the energy expressions given by Eqs. (1a) and (1b). Equations of motion: I y I y 2 EI y kAG(w ) K 2I y 0 (2a) Tw kAGw 0 Aw (2b) I I y 2 GJ I AT K 2 I y 0 (2c) where T is the centrifugal force that is given by L T ( x) A 2 ( R x)dx (3) x Boundary Conditions: The geometric boundary conditions at the cantilever end, x 0 , of the composite beam, w0, t 0, t 0, t 0 The natural boundary conditions at the free end, (4a) x L , of the composite beam, Bending moment: EI y K 0 (4b) Shear force: Tw kAGw 0 (4c) 2 Ankara International Aerospace Conference AIAC-2007-000 Ozdemir Ozgumus, Kaya TI A K GJ 0 Torque: (4d) Exponential Solution and Dimensionless Equations of Motion A sinusoidal variation of w( x, t ) , ( x, t ) and ( x, t ) with a circular natural frequency and the functions are approximated as exponential solutions. wx, t w x e it , x, t x e it , x, t x e it is assumed (5) Additionally, the following dimensionless parameters are used to be able make comparisons with the studies in open literature x x ~ w , R , r2 I , w L L L AL2 (6) Substituting Eq.(5) into Eqs.(1a)-(1c) and using the dimensionless parameters, equations of motion can be rewritten as follows A1 ~ d 2 d 2 dw A A A A 0 2 3 4 5 dx dx 2 dx 2 (7a) ~ ~ x 2 d 2w dw ~ B d 0 B1 x 2 B2 x B3 w 4 2 dx dx dx (7b) x 2 d 2 d d 2 C1 x 2 C 2 x C3 C 4 C5 0 2 dx dx dx 2 (7c) where the dimensionless coefficients are A1 1 , A2 AL4 r 2 EI y 2 2 kAGL2 EI y , A3 K EI y kAGL2 AL4 r 2 A2 2i , A5 EI y EI y B1 1 kAG 2 AL2 2 1 GJ C1 2 I s L2 2 C5 2i , B2 (8a) , B3 2 , B4 AL2 r 2 , C3 Is kAG AL2 2 2 , C2 B2 , C4 (8b) K I s L2 2 AL2 r 2 (8c) Is APPLICATION OF THE DIFFERENTIAL TRANSFORM METHOD The Differential Transform Method is a transformation technique based on the Taylor series expansion and it is a useful tool to obtain analytical solutions of the differential equations. In this method, certain transformation rules are applied and the governing differential equations and the boundary conditions of the system are transformed into a set of algebraic equations in terms of the differential transforms of the original 3 Ankara International Aerospace Conference AIAC-2007-000 Ozdemir Ozgumus, Kaya functions and the solution of these algebraic equations gives the desired solution of the problem with great accuracy. The application procedure of this method can be found in Ref.[2]. Applying the Differential Transform Method to Eqs. (7a)-(7b), the following transformed equations of motion are obtained. A1 k 2k 1 k 2 A2 k A3 k 2k 1 k 2 A4 k A5 k 1W k 1 0 (9a) k k 1 B1 k 2k 1W k 2 B2 k k 1W k 1 B3 W k B4 k 1 k 1 0 2 (9b) k k 1 C1 k 2 k 1 k 2 C 2 k k 1 k 1 C 3 k 2 C 4 k 1k 2 k 2 C 5 k 0 (9c) where ~, k , W k and k are the transformed functions of , w , respectively. Additionally, transformed boundary conditions are obtained as follows by applying DTM to Eqs.(4a)–(4d) at x 0 0 W 0 0 0 (10a) at x 1 A4 k 1 k 1 k 1 k 1 0 (10b) B1 k 1wk 1 k 0 (10c) C1 k 1 k 1 C3 k 1 k 1 0 (10d) RESULTS AND DISCUSSIONS The computer package Mathematica is used to write a program for the expressions given by Eqs.(9a)(10d). In order to validate the computed results, an illustrative example that studies a nonrotating composite Timoshenko beam is taken from Ref. [3] is solved by using the formulas given above. When the results are compared with the ones given in Ref. [3], it is seen that there is a very good agreement between the results. Additionally, effect of the rotation speed on the natural frequencies is examined and the related graphic is plotted. The beam model that is studied in Ref.[3] is a uniform, nonrotating, cantilever glass-epoxy composite beam with a rectangular cross section with width = 12.7 mm and thickness = 3.18 mm. Unidirectional plies each having fiber angles of 15 are used in the analysis. The data used for the analysis are as follows: 0 EI 0.2865 Nm 2 GJ 0.1891 Nm 2 kAG 6343.3 N 0.0544 kg / m I s 0.777 10 6 kgm K 0.1143 Nm 2 L 0.1905 m r 2 0.00002322 0 rad / sec In Table 1, the calculated results are compared with the ones given by Ref. [2] and a vewry good agreement is observed. 4 Ankara International Aerospace Conference AIAC-2007-000 Ozdemir Ozgumus, Kaya Table 1. Validation of the Calculated Results Natural Frequencies DTM Ref.[3] 30.7471 30.747 189.779 189.779 518.791 518.791 648.169 648.169 986.199 986.199 1564.75 1564.751 1 1 0.75 0.75 Second Mode Shape First Mode Shapes In Fig.2, mode shapes of a rotating composite Timoshenko beam are plotted. 0.5 0.25 0 0.25 0.5 0.75 0.2 0.4 0.6 0.8 0.25 0 0.25 0.5 0.75 1 1 1 0.75 0.75 Fourth Mode Shape Third Mode Shape 0 0.5 0.5 0.25 0 0.25 0.5 0.75 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 0.5 0.25 0 0.25 0.5 0.75 0 0.2 0.4 0.6 0.8 1 5 Ankara International Aerospace Conference AIAC-2007-000 Ozdemir Ozgumus, Kaya In Table 2., effect of the rotational speed on the natural frequencies is given. Natural Frequencies Rotatinal Speed (rad / sec) 0 50 100 150 200 250 300 30.747 32.363 36.808 43.273 51.081 59.827 69.313 189.779 189.733 189.597 189.376 189.081 188.733 188.368 518.791 518.461 517.459 515.743 513.242 509.847 505.408 648.169 648.231 648.116 647.923 647.651 647.298 646.861 986.199 985.756 984.415 982.144 978.886 974.561 969.059 1564.751 1564.237 1562.684 1560.066 1556.335 1551.425 1545.248 1944.309 1944.231 1943.997 1943.604 1943.051 1942.334 1941.447 2241.307 2240.888 2239.557 2237.104 2233.289 2228.004 2221.298 References [1] M. O. Kaya, O. Ozdemir Ozgumus, Flexural–Torsional Coupled Vibration Analysis of Axially Loaded Closed Section Composite Timoshenko Beam by Using DTM, Journal of Sound and Vibration, doi:10.1016/j.jsv.2007.05.049 [2] Ö. Özdemir, M.O. Kaya, Flapwise Bending Vibration Analysis of A Rotating Tapered Cantilevered Bernoulli-Euler Beam by Differential Transform Method, Journal of Sound and Vibration 289, 413–420, 2006.. [3] J. Li, R. Shen, H. Hua and X. Jin, Bending-torsional coupled vibration of axially loaded composite Timoshenko thin-walled beam with closed cross-section, Composite Structures 64, 23-35, 2004. 6 Ankara International Aerospace Conference