In this paper inverse magnetostriction effect is accounted for
advertisement

Second LACCEI International Latin American and Caribbean Conference for Engineering and Technology (LACCET’2004)
“Challenges and Opportunities for Engineering Education, Research and Development”
2-4 June 2004, Miami, Florida, USA
Implementation of Coupled Magnetomechanical Analysis Including
Magnetostrictive Effects in Electric Machinery
Osama Mohammed, PhD
Professor, Florida International University, Miami, FL, USA
S. Liu, PhD
Visiting Researcher, Florida International University, Miami, FL, USA
S. Ganu, PhD Student
PhD student, Florida International University, Miami, FL, USA
Abstract
In this paper, inverse magnetostriction effect (IME) is investigated for noise reduction in machinery
applications. The FE implementation is performed on 2 hp surface mounted permanent magnet motor in
two dimensions (2d) as well as in three dimensions (3d). The experimental data for IME is obtained by
performing test on an M-19 electrical steel sample. The implementation results show the increase in the
forces acting on the ferromagnetic region causing more deformation in the back iron. Therefore
magnetostrictive forces must be accounted for reduction of the noise in electric machines especially in
sensitive applications.
Keywords
Inverse magnetostriction effect, Coupled problems, FE, Forces, machines
1. Introduction
Noise in electric machines has always been a subject of research interest in many practical applications.
There are mainly three different noise sources in electric machines namely aero dynamical, magnetic and
mechanical. In this paper, we concentrate on identifying magnetic noise sources. Magnetic noise is
mainly caused by two reasons; one is reluctance forces acting at the interface between two medium of
different permeabilities and other is magnetostrictive forces acting due to change in the permeability of
the medium. Change in the permeability of the medium is caused by stress on the material, the
phenomenon commonly known as inverse magnetostriction effect [1]. As the permeability is changed, the
force acting on the material is changed causing more deformation of the ferromagnetic region. This
introduces eccentricity in the air gap and back iron dimensions and in turn causes more noise. Therefore
proper methods must be introduced to account for IME.
2. Experimental Testing
Presently there was no material magnetization data available under stress level with the manufacturer [2].
In order to obtain magnetization characteristics for M-19 electrical steel under stress conditions,
experiments have been performed in NHMFL [3]. This data is subsequently used for implementation on
PM motor.
3
Excitation
winding
2.5
Path
Applied force
Sample sheet
Applied force
B coil
Flux Density(Tesla)
B
2
1.5
1
stress level 0
A
Hall probe
stress level 1
stress level 2
stress level 3
0.5
Excitation
winding
0
0
500
1000
1500
2000
2500
Field Intensity(KA/m)
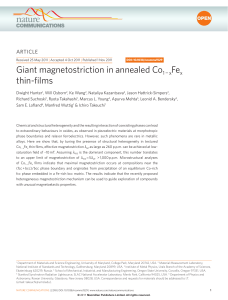
Figure 1: IME measurement procedure
Figure 2: Experimentally obtained BH curves
The measurement principle is shown in Figure (1).The sample is placed at the center of a high field
superconducting magnet. Uniaxial tensile stress is applied at the two sides of the sample to obtain the
required stress on the sample through a load cell. In order to measure the flux density inside the sample, a
B coil is used. As the thickness of the sample sheet is very small, 0.003m, it is impossible to put any
sensor inside it for field strength measurement. Instead, hall probes are put next to it at different distances
along the path AB perpendicular to the sample to measure the field strength outside the sample.
Extrapolation is used to determine the field strength at any point inside the sample. Different values of
stress were applied on the sample and corresponding values of flux density and magnetic strength were
recorded. The obtained BH curves are shown in the Figure (2).
3. Formulation and Modeling considerations
In electric machinery, ferromagnetic parts are subjected to rotating flux conditions. In this case, B and H
are no longer parallel to each other with B lags H. Therefore the full reluctivity tensor must be used in the
magnetic analysis. Magnetic and mechanical properties are interrelated and their relationship is shown in
Figure (3).While solving coupled magneto-mechanical analysis, due to interdependence of the magnetic
and mechanical properties, both stress and permeability of the ferromagnetic regions change. Magnetic
field induces stress inside the material. This internal stress along with external applied stress changes
Magnetostriction Effect
S A J
K U F
[S ]
[ A]
[J ]
[K ]
[U ]
[F ]
Electromagnetic stiffness matrix
Magnetic vector potential matrix
Current density excitation matrix
Mechanical stiffness matrix
Displacement matrix
Force matrix
Magnetostriction Effect
Figure 3: Inclusion of inverse magnetostriction effect in coupled analysis
permeability of the medium. This change in the permeability causes increase in the magnetic forces which
in turn cause more deformation. To account for this interdependence, coupled magneto mechanical
analysis must be solved. As the nonlinear magnetic properties are used for ferromagnetic region,
iterations should be performed to reach a converged solution. This iteration is considered as internal loop.
From this solution, the stress on each element is obtained and magnetic property of that element is
modified according to stress level. Then coupled equations are solved till convergence is achieved. These
iterations can be considered as external loop. The looping is continued until total energy of the
ferromagnetic region under consideration is unchanged. This complete process is called “material
property updating procedure”. The formulation of force calculation used for both 2d (vector potential)[4]
and 3d (scalar potential) [5] is shown below:
H
F e [ B
U
Re
H
det G H
det
G
B
dH
B dH det G ]dRe ---3d
U
0
0
U
B
F e [ H T
U
Re
(1)
B T
det G B
det
G
H
dB
H T dB
det G ]dRe ---2d (2)
U
0
0
U
The third term in both equations (1) and (2) is magnetic force due to the inverse magnetostriction
e
effects of element e and is denoted as Fime
.
Re : region of element e , described with local coordinate system.
For 2D plane element, dRe d d , In 3D volume element, dRe d d d .
, B , and H : stress, flux density and field strength of element e .
U : virtual displacement in any direction.
G : determinant of the local Jocobian derivative matrix G .
e
Fime
term for full reluctivity tensor in case of 2d and 3d is written below [6]:
1
1
e
Fime
=- {[ xx' u Bx2 xy' u Bx By yx' u Bx By yy' u By2 ]
2
2
Re
---2d
(3)
E / 1 (1 2 ) | G |}d d
1
e
Fime
[ xx' u Bx2 xy' u Bx By xz' u Bx Bz
2
Re
1
'
yx
---3d
u By Bx yy' u By2 yz' u By Bz
2
1
E
zx' u Bz Bx zy' u Bz By xz' u Bz2 ]
G d d d
2
1 v 1 2v
(4)
Where, E is Young’s modulus, is Poisson’s ratio
xx' u , xy' u , xz' u , yx' u , yy' u , yz' u , zx' u , zy' u , xz' u are the derivatives
of reluctivity w.r.t. stress in x, y, z directions.
To determine reluctivity of the element, stress information is obtained from coupled magneto-mechanical
analysis. From the stress value, two BH curves are identified to be used for calculation. Depending on the
flux density value, reluctivity values on selected BH curves are obtained by performing nonlinear
Lagrange interpolation. Upon getting those reluctivity values on the curves, linear interpolation is
performed to obtain element reluctivity value. For calculating the derivative of the reluctivity with respect
to the stress, following formulations are used with full reluctivity tensor [6]:
If e 0 e 1 , then
If e 0 e 1 then
e
xx
e
e
yy
e
e
yx
e
eyy
e
e 0
cos( B ph ) e
0
e
xx
e 0
e 0
e
xy
sin( B ph )
e
sin( B ph )
e
e
yx
e 0
sin( B ph ) e
0
cos( B ph )
e 1
cos( B ph )
1 e
e
e
yy
e 0
e
e 0
e 1
1 e
sin( B ph )
1
1 e
(5)
e
1 e
cos( B ph )
1 e
Where B are inclination angle of flux density with respect to the rolling direction, ph are phase angle
between flux density B and field strength H .
e is elemental stress, 0 is stress on BH0 curve, 1 is stress on BH1 curve
e is elemental reluctivity, 0 is reluctivity on BH0 curve , 1 is reluctivity on BH1 curve.
The calculation of force values is performed after finishing the material property updating procedure.
These IME forces are then applied back on the ferromagnetic region and iterations are performed till
convergence is achieved. This solution gives the final results for a given rotor position. Such procedure is
repeated for different rotor positions to obtain a complete transient magneto mechanical solution
including full reluctivity tensor. A 2 hp surface mounted permanent magnet motor is used for
implementation of coupled magneto mechanical analysis including IME as shown in Figure (4).
4. Results and discussion
0 degree
0 degree
10 degree
10 degree
20 degree
20 degree
Figure 4: one pole of
2 hp motor
Figure 5: Deformation on stator with (top) and without (bottom)
magnetostriction in 3d
force in back iron
force at shank iron
Force at teeth surface
0.6
4
3.5
3.5
3
0.5
3
0.4
force(N)
2.5
2
force(N)
Magnetic force(N)
2.5
2
0.3
1.5
1.5
1
0.2
1
0.1
0.5
0.5
0
0
0
17.17
35
52.83
70
87.17 105 122.8 140 157.2 175 192.8 210 227.2 245 262.8 280 297.2 315 332.8 350
angle(degree)
without
with
0
0
40
75
115
150
190
angle(degree)
with magnetostriction
225
265
300
340
0
17.5
37.5
55
75
92.5 112.5
130
150
167.5 187.5
205
225
242.5 262.5
280
300
317.5 337.5
angle(degree)
without magnetostriction
with magnetostriction
Figure 6: Force at teeth surface (left), force at teeth shank (middle), force at back iron (right)
with and without magnetostriction in 3d
From Figure (5), it is clear that deformation with magnetostriction is more and asymmetric compared to
without magnetostriction. Increase in the deformation is due to addition of the IME forces to the
reluctance forces while asymmetry can be attributed to the presence of the IME forces at the teeth shank
and back iron. As the magnitude of the IME forces is dependent on the flux density value, they cause
asymmetrical deformation in back iron. From Figure (6), it is clear that at the teeth surface the magnitude
of the forces with and without magnetostriction are almost same and follow the expected pattern. This is
due to reluctance forces which are dominant compared to IME forces. At the teeth shank, reluctance
forces are absent and only IME forces are visible. The difference in force magnitudes is more pronounced
in the back iron where we can see only IME forces. It is seen that IME forces at back iron do not follow a
repetitive pattern. The magnitudes of forces shown in this figure are for an assumed 2 inch axial length of
the motor model.
5. Conclusion
We presented and implemented a magneto-mechanical model for electric machine analysis including
magnetostrictive effects. Full tensor reluctivity formulation is used and the analysis is done in 2d and 3d.
The result clearly shows an increase in the magnitude of the deformation due to IME forces in the back
iron. This is one of the reasons for noise emitted in electric machines. The increase in the value of the
forces must be accounted at the design stage to reduce such noises in a variety of applications of electric
machinery.
6. References
[1]
[2]
[3]
[4]
[5]
[6]
Tremolet de Lacheisserie, Etienne du(1993), Magnetostriction Theory and Applications of
Magnetoelasticity, CRC Press.
Armco Non-oriented Electrical steels, Armco Data, 1997.
Mohammed O.A. et al.(June 2003), “FEM Analysis and Testing of Magnetostrictive Effects in Electrical
Steel Samples For Machinery Applications,” IEEE General Meeting and Technical Conference,
Toronto, Canada.
Mohammed O.A. et al.(sept.2001), “Coupled Magnetoelastic Finite Element Formulation Including
Anisotropic Reluctivity Tensor and Magnetostriction Effects for Machinery Applications”, IEEE
transactions on Magnetics, vol.37, No.5.
Coulomb J.L. and Meunier G. (Sep.1984), “Finite Element Implementation of Virtual Work
Principle for Magnetic or Electric Force and Torque Computation”, IEEE Transactions on
Magnetics, Vol.Mag-20, No.5.
Mohammed O.A. et al.(June 2003), “Magnetic Force Calculation in Magneto-mechanical Coupled
Problems,” to be presented in IEEE International Electric Machines and Drives Conference
IEMDC2003, Madison, USA, under reviewing for publishing in IEEE Transactions.
355