How does angular velocity change as a function of time in a Lor
advertisement

March 3rd 2003
Sebastian Peleato
1
Abstract
The study of Chaos is a wide and diverse field that not only applies both within
the science and the humanities. Chaos is based upon the realization that most of our world is
comprised of non-linear systems about which it is difficult to make predictions and which can
be greatly affected by small changes. One physical system where Chaos has been found is
the Lorenz water wheel. The Lorenz water wheel is particularly well suited to an
investigation of Chaos because unlike natural systems it has a limited number of easily
controlled parameters and can be easily built. By studying the evolution of angular velocity
over time in a Lorenz water wheel key features of chaotic systems can be explored. As
parameters are varied, in this case the water flow rate, it can be expected that different
behaviours, including Chaos, will arise.
Time series graphs, attractor reconstruction, Lyapunov exponents, and
frequency spectrums are used to analyze the thirty one data sets collected across four
different flow rates. As predicted regions of unpredictable, chaotic behaviour did arise at
sufficiently high flow rates. They were found to be aperiodic, dynamical, deterministic, and
sensitive to initial conditions. Other data sets, at lower flow rates, showed either temporary
chaos or periodicity that eventually stabilized at 0 rad /s. Thus a direct relation between flow
rate and the type of behaviour can be perceived. Runs with either sustained periodicity or a
single uniform value failed to develop but this is attributable to experimental error. This
experiment also reveals the importance of studying systems over the long term. Short time
intervals can lead to incorrect conclusions about the behaviour of the system. With that in
mind any future investigations into Chaos should provide for much larger data sets.
March 3rd 2003
Sebastian Peleato
2
Table of Contents
A. Introduction ......................................................................................................................... 3
B. Background .......................................................................................................................... 3
C. Experimental Design ........................................................................................................... 5
D. Data Analysis ....................................................................................................................... 7
1. Time Series Analysis ......................................................................................................... 8
2. Attractor Reconstruction .................................................................................................... 9
3. Lyapunov Exponents ....................................................................................................... 12
4. Frequency Spectrum Analysis .......................................................................................... 14
E. Error Discussion ................................................................................................................ 15
F. Integrated Analysis ............................................................................................................ 16
G. Conclusion ......................................................................................................................... 17
Appendix I: Picture Gallery and Complete Description .................................................... 19
Appendix II: Experimental Procedure ................................................................................ 21
Appendix III: Time Series Graphs ....................................................................................... 22
Appendix IV: Mathematical Model Source Code ............................................................... 33
Appendix V: Basgen and Fet Settings .................................................................................. 34
Works Consulted.................................................................................................................... 35
March 3rd 2003
Sebastian Peleato
3
A. Introduction
Chaos theory is one of the most exciting scientific and mathematical
developments of the 20th Century. Chaos theory does not alter any of the fundamental laws
of science; rather it extends them to the study of, generally overlooked, non-linear, aperiodic
systems. One of the most important implications of chaos, given the predominance of such
systems, is the unpredictability of many of the phenomena in our world. One specific nonlinear system, and the subject of this investigation, is a Lorenz water wheel. In order to study
the behaviour of this system the experiment will focus on one parameter, angular velocity,
and its evolution as a function of time.
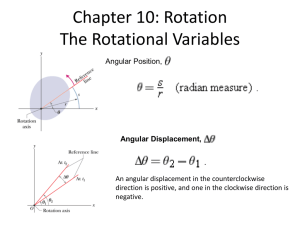
B. Background
The Lorenz water wheel was borne of work Edward Lorenz was doing in the
early 1960s with meteorological modeling. It as designed as a simplified demonstration of
the behaviour he had noted in the computer simulations of convection curls he was
conducting.
Under certain conditions the resulting flow is as
symmetric and steady as the heating which gives rise to
it. Under different conditions a system of regularly
spaced waves develops and progresses at a uniform speed
without changing its shape. Under still different
conditions an irregular flow pattern forms, and moves and
changes its shape in an irregular, nonperiodic manner.1
1Edward
Lorenz, “Deterministic Nonperiodic Flow”, Journal of The Atmospheric Sciences 20 (March 1963)
130-141
March 3rd 2003
Sebastian Peleato
Figure 1
4
Figure 2
It can be expected that the waterwheel will have equivalent behaviours to the
Lorenz model and thus the long-term evolution of the angular velocity of the wheel will be
characterized by three possible behaviours. When the water is flowing into the system at a
rate that does not exceed the rate at which the buckets empty the system does not move. At
greater flow rates the wheel does turn but behaves
in a deterministic manner, with angular velocity
either constant or oscillating periodically. Finally
there exists a region of flow rates where the
angular velocity varies in a seemingly random
manner. No matter how many times the
experiment is conducted the angular velocity will
evolve differently as time passes; similarly
allowing the experiment to run for a long time
will not result in any periodicity. These three
Figure 3
March 3rd 2003
Sebastian Peleato
5
possibilities are illustrated in figures 1-32.
The third behaviour is in fact not random, far from it; the system is obeying all
the laws of physics. That being said it is impossible to make meaningful predictions about
the angular velocity of the water wheel at these flow rates. In this case the water wheel is
behaving chaotically. Chaotic behaviour is characterized by four main features: it is (1)
dynamical meaning it changes over time, (2) aperiodic and thus evolves unpredictably, (3)
deterministic and therefore non random, and (4) sensitive to initial conditions. Sensitivity to
initial conditions means that an experimentally imperceptible change to the set up of the
water wheel between two runs results in major discrepancies between the data sets. As the
system is still deterministic, if the initial conditions could be determined with absolute
accuracy the behaviour of the chaotic water wheel could be predicted. The reality is that
absolute measurement is not experimentally possible thus it is impossible to make predictions
about chaotic systems.
C. Experimental Design
The expected behaviours can be verified either through mathematical modeling
or by constructing a Lorenz water wheel, the later being the main thrust of this investigation.
The mathematical model is the solution to the three Lorenz equations that led Lorenz to his
discovery. They are:
dx/dt = a(y-x)
dy/dt = rx-y-xz
dz/dt = xy-bz3
where a, r, and b are parameters in the system. Typically a and b are held constant and r is
changed in order to generate chaotic behaviour. Changing the value of r corresponds with
changing the flow rate in a Lorenz water wheel. The x value is equivalent to angular
2
Marlene Booth, Section 4: A Chaotic Waterwheel. n.d. Available [Online]:
http://kendrick.colgate.edu/mboothe/chaos/section4.htm October 12, 2002
3 Manus J. Donahue III, An Introduction to Mathematical Chaos Theory and Fractal Geometry, n.d. Available
[Online]: http://www.duke.edu/~mjd/chaos/chaos.html October 12, 2002
March 3rd 2003
Sebastian Peleato
6
velocity. The mathematical model is useful for investigating the behaviour of the system and
provides a benchmark for the experimental data.
A Lorenz water wheel is similar to a traditional water wheel. It has buckets
around the outside of a rigid disk with an axle in the middle. When a stream of water is
directed at the water wheel the buckets fill and the force of gravity causes the wheel to rotate.
The difference is that a the buckets on a Lorenz water wheel have holes in the bottom that
allow the water to also flow out and are hinged so that they always face upwards. The two
most common implementations of this are a tilted design and a design that resembles a Ferris
wheel. It is also necessary that the water wheel have the provision for the measurement of
angular velocity. The water flow must be continuous and regulated so that various flow rates
may be used. A low friction axle is required to observe the development of chaotic
behaviour.
The water wheel used is of the Ferris wheel design. As
Figure 7
can be seen in Figure 4 the water wheel consists of 5 hinged
Figure 6
buckets, with holes cut in the bottom, arranged evenly around the
outside of a wooded wheel. The disk is free to rotate on its axle and the water source is a
bucket and hose assembly positioned above the wheel. As shown in figure 7 a rotational
motion sensor connects to the wheel using a loop of string. Angular velocity is logged by to
a computer, which connects to the sensor with an interface box, running Science Workshop.
March 3rd 2003
Sebastian Peleato
7
See Appendix I for a complete set of pictures and a full description of the water wheel that
was built for this experiment.
The purpose of the experiment is to identify the development of the angular
velocity of the water wheel. For a complete range of the possible behaviours the experiment
will be repeated with different parameters, namely with a changed water flow rate. It is also
necessary to repeat the experiment several times at each flow rate to test for sensitivity to
initial conditions. The initial conditions that must be controlled for each run besides the flow
rate are the position of the wheel, the status of the string, the position of the buckets, the
amount of water in the buckets, and the position of the hose. The experimental procedure can
be found in Appendix II.
D. Data Analysis
Thirty-one data sets of at least four minutes in length, which encompass four
different flow rates, were collected. For reasons of consistency the analysis will deal with
the first four minutes or 2400 data points. Flow 1 corresponds with the slowest flow rate and
flow 4 with the fastest. The data analysis makes use of four techniques, a (1) visual analysis
of the time series graph, (2) attractor reconstruction, (3) Lyapunov exponents and (4)
Frequency spectrums are calculated when necessary to address periodicity. It is expected that
the behaviour of each run will be either uniform, continuous revolution at the same angular
velocity; periodic, a reoccurrence of the same limited set of angular velocities; or chaotic,
unpredictable change in angular velocity. In order to reach these conclusions the results of
each of these analysis techniques must be considered.
March 3rd 2003
Sebastian Peleato
8
1. Time Series Analysis
At flow rates 1, 2, 3, and 4 a visual analysis of the angular velocity time series
graphs indicates that sensitivity to initial conditions exists. This can be said because within
each flow rate no two-time series graphs develop in the same manner. For instance runs 1-6
Figure 8: Runs 1-6 ( 0-10s) Time Series Graph
2.5
initially develop similarly as in Figure 8 but
begin to diverge significantly about 20
Angular Velocity (rads / s)
2
Figure 9: Runs 1-6 ( 0-40s) Time Series Graph
2.5
2
1
0.5
1
0
0
10
20
30
40
50
60
70
80
90
100
0.5
Data Points (10 data points = 1s)
0
seconds into the run and diverge completely
-0.5
after about 40 seconds as illustrated by
-1
Figure 9. A complete set of time series
-1.5
-2
0
50
100
150
200
250
300
350
400
graphs can be found in Appendix III.
Data Points (10 data points = 1s)
Some of the data sets, notably at rates 1 and 3, do exhibit what may be periodic
behaviour according to an analysis of their time series graphs. Figure 10 shows the first 240
Figure 10: Run 11 and Run 26 Time Series Graph
seconds of runs 11 and 26 as a
2.5
Run 11
Run 26
2
demonstration of this behaviour. As
can be seen, while there are
variances in the amplitudes of the
waves, the peaks are evenly spaced.
1.5
1
Angular Velocity (rad / s)
Angular Velocity (rads / s)
1.5
1.5
0.5
0
-0.5
-1
The time series graphs also show
-1.5
-2
that some of the data sets, for
-2.5
instance run 4 and run 26, the wheel
0
500
1000
1500
2000
Data Points (10 data points = 1s)
stops. Admittedly this is beyond the 2400 data point restriction in run 26 but all the other
March 3rd 2003
Sebastian Peleato
9
runs at this flow rate stop within 1600 data points. Thus run 26 can be seen as representative
of behaviour at that flow rate within the given time scale. All of these phenomenon merit
further, more rigorous analysis.
2. Attractor Reconstruction
An attractor is another graphical manner in which the development of a system
can be represented. The attractor for the system can be reconstructed using the time delay
method, this involves plotting the angular velocity at time x s versus the angular velocity in
the future. The resultant attractor is in lagged phase space, a special form of pseudo phase
space. Some explanation of these terms is in order. Phase space is an area that contains all
the possible states of a system. Each axis in a phase space plot represents one of the defining
variables of the system, thus every possible combination of variable values has a distinct
point on the graph. That it is in lagged phase space specifies that it is a two dimensional
graph where both axis represent the same quantity, but at different times. It is important to
realize that even though the same quantity is represented on both axes each point is still a
unique state for the system. An attractor is thus the plot of all the states through which the
Figure 11: Cosine Wave Attractor
system can pass. In the language of chaos
1
0.8
science an attractor is often said to be the
trajectory of the system through phase
space.
Figure 11 shows the attractor
for a cosine wave. The periodic nature of
the cosine wave is clear in this plot, there
Angular Velocity at t = x + 9 (rad / s)
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-1
are a limited number of points for the
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Angular Velocity at t = x (rad / s)
system to attract towards. This sort of attractor is termed a limit cycle as it repeats
indefinitely in a closed loop. The attractor for the Figure 12 is the attractor for the first 5000
1
March 3rd 2003
Sebastian Peleato
10
data points of the x value generated by solving the Lorenz system using the source code
found in Appendix IV. An a value of 10, an r value of 28, and a b value of 8/3, values which
are reported by to yield chaotic results, were used. The attractor was reconstructed using the
Figure 12: Chaotic Attractor
time delay method and a delay of 9 iterations.
25
20
As opposed to Figure 11, which comprises a
Angular Velocity at t = x + 9 (rad / s)
15
limited number of possible states, Figure 12
has an infinite number of states because the
trajectory of the attractor never converges. It
10
5
0
-5
-10
is important to note the shape of this attractor;
-15
-20
-20
the double orbit is characteristic of the Lorenz
-15
-10
-5
0
5
10
Angular Velocity at t = x (rad / s)
15
system.
Attractor
Figure 13: Run 1 Attractor
3
analysis can also be
applied to the
Angular Velocity at t = x + 9 (rad / s)
2
experimentally collected
1
data. Figure 13 is the
0
attractor generated by
-1
applying the time delay
method, again with a lag
-2
of 9 data points or 0.9
-3
-3
-2
-1
0
1
Angular Velocity at t = x (rad / s)
2
3
seconds, to the 1st data
series, which is representative of most of the data. This lag was found experimentally, using
the computer generated data, to best show the attractor. It is representative of the attractors
for flow rates 2, 3, and 4, which can be found in Appendix III. This attractor has the same
distinctive shape as Figure 12, which immediately suggests similar, and hence, chaotic
20
25
March 3rd 2003
Sebastian Peleato
11
behaviour.
More specifically three important observations can be made about this attractor
that suggest chaos. The fact that the system remains within certain bounds indicates that the
system is behaving deterministically and not randomly. If the system were random no such
boundaries would exist. Secondly the successful reconstruction of an attractor necessitates a
relationship between the data points that also indicates deterministic behaviour because it
implies a consistent relationship between the data points. Finally unlike with the cosine
attractor the trajectory is not merged into a single continuous loop but rather evolves
distinctly from any given point in phase space. At least for the time interval graphed the
angular velocity of the system does not evolve a limit cycle, thus it is neither non periodic,
nor does it stabilize at any one value or set of value. It is true that the loops cross over each
other and thus intersect the same point in phase space but this can be attributed to noise in the
data as the trajectories to not merge, they only briefly intersect. These crossings are due to
irregularities in the shape of the attractor, which further suggests noise. Attractors that
display these properties arise from chaotic systems and are termed strange attractors.
The attractor for run 11, one of the data sets that shows signs of periodicity, is
Figure 14: Run 11 Attractor
shown in figure 14. It does not
2
show any trajectory
Angular Velocity at t = x + 9 (rad / s)
1.5
convergence and does appear to
be one half of the orbit of the
1
attractors noted above. This is
0.5
to be expected, as the angular
velocity values for this run are
0
consistently positive. With this
-0.5
-0.5
0
0.5
1
Angular Velocity at t = x (rad / s)
1.5
2
March 3rd 2003
Sebastian Peleato
12
in mind, the attractor indicates
Figure 15: Run 4 Attractor
2.5
that Run 11 is chaotic. The
2
other noted behaviour at flow 1
where the angular velocity
tended to 0. Figure 15 shows
the attractor for run 4. It shares
the attractor shape of run 1,
Angular Velocity at t = x + 9 (rad / s)
is the runs, such as run 4,
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-2
-1.5
-1
-0.5
0
0.5
1
Angular Velocity at t = x (rad / s)
which suggests that in the data
1.5
2
2.5
preceding the wheel’s stop was evolving chaotically. An arrow on the graph shows the point
where the wheel stopped.
The attractor for run 26, figure 16, which was collected at flow 3 lacks the
characteristic double orbit even though it has negative values. This suggests that the data is
not chaotic as this is not the strange attractor for angular velocity in a Lorenz system. No
limit cycle develops but each successive orbit tends to be a smaller version of the orbit that
Figure 16: Run 26 Attractor
preceded it indicating a spiral
2.5
2
shape. This means that the lack of
a limit cycle likely has more to do
with the tendency towards zero
than the failure to behave
periodically.
Angular Velocity at t = x + 9 (rad / s)
1.5
1
0.5
0
-0.5
-1
-1.5
3. Lyapunov Exponents
A Lyapunov exponent
-2
-2.5
-2.5
-2
-1.5
-1
-0.5
0
0.5
Angular Velocity at t = x (rad / s)
1
1.5
2
is a value that quantifies how a
system changes over time. It describes the convergence or divergence of two trajectories in
2.5
March 3rd 2003
Sebastian Peleato
13
phase space. They can be calculated by comparing the trajectories that result from two near
by points on the attractor. Negative Lyapunov exponents indicate that the system is
converging, and positive Lyapunov exponents indicate that the system is diverging. Periodic
data has a Lyapunov exponent of 0. While their calculation can be difficult and great care
must be taken to ensure that the value determined is representative they are an important
metric of the behaviour of the system4. A Lyapunov exponent can be thought of as a
quantification of sensitivity to initial conditions, the greater the value the greater the
divergence of the two attractors in a given time period. Table 1 contains Lyapunov
exponents from a sample of the data sets.
Table 1: Lyapunov Exponents
Data Set
Cosine Wave
Chaos Set
Run 1
Run 6
Run 11
Run 16
Run 21
Run 26
Run 31
Flow Rate
NA
NA
1
1
1
1
2
3
4
Lyapunov Exponent (bits / second)
0.0000
0.0713
0.5302
0.6099
-0.0121
0.5743
0.4001
0.2666
0.5349
All values were calculated using basgen and fet5, a set of applications that use a more
advanced Lyapunov algorithm than the one mentioned above. The settings used are listed in
Appendix V. The Lyapunov exponent for the chaos set is an order of magnitude lower than
that for the data runs. This is because it is calculated in bits per iteration, in the case of the
collected data one data point represents 0.1 seconds and fet multiplies the output by 10 to
compensate for this. For data calculated with iterations as the time unit no such
multiplication takes place thus explaining the lower Lyapunov exponent for the computer
4
5
A simple Lyapunov algorithm can be found at http://sprott.physics.wisc.edu/chaos/lyapexp.htm
Availible at www.hactar.org/software/lyap.exe
March 3rd 2003
Sebastian Peleato
14
generated chaotic data.
The majority of the calculated Lyapunov exponents are positive which supports
the conclusion thus far for flows 1,2, and 4 that the angular velocity of the water wheel
evolved chaotically as positive Lyapunov exponents indicate a divergent attractor. Two of
the results warrant further comment, -0.0121 for Run 11 and 0.2666 for Run 26. The
magnitude of the Run 11 value is an order of magnitude lower than any of the other
experimental values. This, coupled with its proximity to zero further indicates periodic
behavior during Run 11. The fact that the number is not exactly zero and is in fact negative
can be explained by the fact that this is experimental data and the presence of noise in the
data as has already been observed. Lyapunov calculation is sensitive to noise because noise
alters the shape of the attractor and can mask the underlying form.
Analysis so far would make it logical to categorize Run 26 as periodic. A
Lyapunov exponent of 0.2666 is not consistent with this, it may be roughly half the other
values, but it does not approach 0 in the same manner that 0.0121 does. This is possibly
because the angular velocity goes to 0 radians / second, which, as has been explained already,
would prevent the attractor trajectory from converging even if the data were periodic.
Another possible explanation for this is that the Lyapunov exponent was not properly
calculated for this data set. This is a possibility as one of the parameters relates to the
number of points in an orbit and the orbit structure, as this run lacks the double orbit, is
different for run 26.
4. Frequency Spectrum Analysis
Frequency spectrums were calculated for the two representative data sets that
showed signs of periodicity. A frequency spectrum decomposes, in this case, a data set into
its component harmonic frequencies. The frequency spectrum for run 26, calculated using
Matlab’s Fast Fourier Transform function, has a pronounced spike as can be seen in Figure
March 3rd 2003
Sebastian Peleato
15
17. This spike indicates the existence of harmonic frequency in the data set, something that
could only exist if the data had a periodic element. A similar spike can also be seen in figure
18, the frequency spectrum for run 11, which again indicates a periodic element to the data.
Figure 17: Run 26 Frequency Spectrum
Figure 18: Run 11 Frequency Spectrum
1500
4500
4000
3500
1000
Magnitude
Magnitude
3000
2500
2000
1500
500
1000
500
0
0
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0
Frequency
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Frequency
E. Error Discussion
There are two main potential sources of error. The first is imperfections in the
construction of the water wheel. As can be seen in the photos in Appendix I it is not perfectly
balanced between the two sides, which means that the wheel has an asymmetric distribution
of weight that will have an effect on the rotation of the wheel. This is likely a small source of
error because, given the total mass of the wheel, the discrepancies are not likely to be
significant. These errors in construction have a more serious effect though because they
affect the placement of the buckets. This impacts on the assumption that each bucket acts
equally on the system and could have a notable impact.
The other possible source of error for this experiment is difficulties in
controlling the initial conditions noted above. Care was taken with the experimental
procedure but it is true that no precision instruments were used to control these variables.
While in cases of extreme discrepancy it would be possible for this to have a measurable
effect on the behaviour of the system the impact was likely negligible. While there will be a
change in the actual angular velocity values returned it is unlikely that the behaviour will be
March 3rd 2003
Sebastian Peleato
16
impacted. This is because the behaviours reside in regions so unless a particular flow rate
was close to a behaviour boundary it is very unlikely that the behaviour would change. The
data collection set up, the rotational motion sensor connected to Science Workshop, is not a
significant source of error.
The most important improvement to this experiment would be to construct the
water wheel with better tools. The closer they are to round and the more evenly spaced the
buckets are the better the results will be and the less noise they will have. Perhaps a smaller,
lighter weight wheel would be more conducive to periodic behaviour. In terms of
experimentation it would be interesting to see the development of runs over a time longer
than four minutes. If a mechanical pumping system could be devised then runs of at least
thirty minutes would be useful. In addition tests at more flow rates would help categorize the
full range of possible behaviour from the water wheel
F. Integrated Analysis
Data sets such as run 4 that stop arbitrarily do initially display chaotic
behaviour. This can be said based upon the shape of the attractor and a positive Lyapunov
exponent, .3949 for the first 1500 data points. In addition the time series graph contains a
sudden change in behaviour, which is also indicative of chaos, as it is evidence of the
unpredictable nature of the system. Given that these runs were interspersed with sustained
chaotic behaviour raises the possibility that some sort of error is responsible for the stop.
Imperfections in construction are the most serious source of error thus it is logical to assume
this is chiefly responsible.
Despite what the Lyapunov exponent may indicate the angular velocity of the
wheel in run 26 evolves a periodic tendency prior to stopping. This is by no means a pure
sinusoidal wave, as there is noise in the data and sources of error in the experimental
technique, but the evidence for this behaviour is clear. Not only does the attractor lack the
March 3rd 2003
Sebastian Peleato
17
double orbit, the frequency spectrum indicates a defined harmonic. Periodicity with a
tendency towards zero is to be expected at some flow rates but its pervasive nature in the subchaotic flow rates suggests that the behaviour was periodic but could not be sustained due to
experimental error, probably similar to what caused run 4 to stop. This same error could have
also been the reason that no uniform values other than zero were observed.
According to the analysis performed data sets such as run 11 are periodic. As
with run 26, periodicity is evidenced by the frequency spectrums. In addition run 11 has a
Lyapunov exponent very close to 0, which is further evidence of periodicity. What is very
important though is that the attractor does not match that of a sinusoidal wave; rather it
resembles one of the orbits of a Lorenz attractor. This coupled with the fact that these
periodic runs were interspersed with chaotic runs leads to the possibility that while the data
was periodic over the first 2400 points it would have developed chaotic behaviour if allowed
to continue for long enough. This is in fact the case with run 11; according to the time series
graph in the appendix that includes all the collected data points the periodic behaviour ends
after about 500 seconds. Further investigation is still necessary as this is not consistent with
all the originally periodic runs, for instance run 18.
For flow 2, 4, and the unaccounted for data sets in flow 3 the behaviour of the
water wheel is chaotic. Sensitivity to initial conditions can be seen by the positive Lyapunov
exponents and by an analysis of the time series graphs, which never duplicate one another. In
addition attractor reconstruction shows the angular velocity to develop in a deterministic yet
non-periodic manner. The trajectories do not merge but do stay within certain bounds.
G. Conclusion
The water wheel did not develop any uniform non-zero angular velocities. The
only steady state the wheel tended towards was zero. This is quite likely due to error but
would require more investigation to confirm that hypothesis. Sustained periodic behaviour
March 3rd 2003
Sebastian Peleato
18
was not observed at sub-chaotic flow rates although in this case it is reasonable to conclude
that this had more to do with experimental error than the absence of that behaviour. The
existence of periodic behaviour at chaotic flow rates is likely a function of the sample time
but more investigation is needed. Finally, as predicted, sustained chaotic evolution of the
angular velocity, about which any predictions are meaningless, was observed.
March 3rd 2003
Sebastian Peleato
Appendix I: Picture Gallery and Complete Description
Figure 1
Figure 2
I
Figure 3
Figure 4
19
March 3rd 2003
Sebastian Peleato
20
As can be seen in figure 1 the water wheel is made of two ½ inch plywood circles that
are approximately 65cm in diameter. Each piece has a hole drilled in the middle that is the
same diameter as the outside diameter of a short length of copper pipe that is affixed inside.
The axle consists of a steel rod with two ball bearings that rest inside the copper pipe. There
are 5 connecting rods, ½ inch dowel, between the two disks and a two-liter bucket; figure 2,
with 4 small holes hangs from each of them. A small plastic bag that is attached to the axle,
figure 3, ensures that the stream does not fill the buckets while they are in the lower half of
the water wheel by diverting the water away from them. This is important because typically
the Lorenz system only has one energy input point, in addition filling the buckets at the
bottom would result in excessive rotational dampening that would hinder the development of
chaotic behaviour
The water source is a continuously refilled bucket with a tap and hose attached as is
seen in figure 4. The opening of the hose is fastened in pace directly above the axle of the
water wheel, shown in figure 1. Angular velocity is measured by means of a loop of string
that is wrapped around one segment of copper pipe and a rotational motion sensor. A basin,
placed under the wheel and also visible in figure 1, contains the water after it has passed
through the wheel and allows it to be reused
March 3rd 2003
Sebastian Peleato
21
Appendix II: Experimental Procedure
1. Position the hose so that it is directly over the axle and the stream falls towards the
middle of the wheel. Fasten it in place
2. Ensure that the buckets are empty and that the same one is positioned under the hose
for each trial. It is also important that they hang straight down and that they are
centred on the connecting bars.
3. The string should be taut and parallel to the wooden disks to ensure the angular
velocity of the wheel is being accurately represented.
4. Begin logging data with Science Workshop
5. Open the tap to the correct position for the flow rate being used
6. Allow the run to evolve for at least four minutes and then stop logging data. Close the
tap only after data logging has stopped.
7. Repeat steps 1-6 multiple times at each flow rate.
March 3rd 2003
Sebastian Peleato
22
Appendix III: Time Series Graphs
Flow 1
Run 25 Time Series Graph
2
1.5
Angular Velocity (rad/s)
1
0.5
0
-0.5
-1
-1.5
-2
0
500
1000
1500
Data Point (10 data points = 1s)
2000
Run 26 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-2.5
0
500
1000
1500
2000
2500
3000
Data Point (10 data points = 1s)
3500
4000
Run 27 Time Series Graph
1.5
Angular Velocity (rad/s)
1
0.5
0
-0.5
-1
-1.5
-2
0
500
1000
1500
Data Point (10 data points = 1s)
2000
4500
5000
March 3rd 2003
Sebastian Peleato
23
Run 28 Time Series Graph
1.5
Angular Velocity (rad/s)
1
0.5
0
-0.5
-1
-1.5
-2
0
500
1000
1500
Data Point (10 data points = 1s)
2000
Flow 2
Run 20 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-2.5
0
500
1000
1500
2000
2500
3000
Data Point (10 data points = 1s)
3500
4000
4500
Run 21 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-2.5
0
500
1000
1500
2000
2500
3000
Data Point (10 data points = 1s)
3500
4000
4500
5000
March 3rd 2003
Sebastian Peleato
24
Run 22 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
0
500
1000
1500
2000
2500
3000
Data Point (10 data points = 1s)
3500
4000
4500
Run 23 Time Series Graph
2
1.5
Angular Velocity (rad/s)
1
0.5
0
-0.5
-1
-1.5
-2
-2.5
0
500
1000
1500
2000
2500
3000
Data Point (10 data points = 1s)
3500
4000
Run 24 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
Data Point (10 data points = 1s)
2500
3000
March 3rd 2003
Sebastian Peleato
25
Flow 3
Run 1 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
-4
0
500
1000
1500
2000
2500
Data Point (10 data points = 1s)
3000
3500
4000
Run 2 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
Data Point (10 data points = 1s)
2500
Run 3 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
-4
0
500
1000
1500
Data Point (10 data points = 1s)
2000
3000
March 3rd 2003
Sebastian Peleato
26
Run 4 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
0
500
1000
1500
Data Point (10 data points = 1s)
2000
Run 5 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
Data Point (10 data points = 1s)
2000
Run 6 Time Series Graph
4
Angular Velocity (rad/s)
3
2
1
0
-1
-2
-3
0
500
1000
1500
2000
2500
Data Point (10 data points = 1s)
3000
3500
March 3rd 2003
Sebastian Peleato
27
Run 7 Time Series Graph
2
1.8
Angular Velocity (rad/s)
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
500
1000
1500
2000
2500
Data Point (10 data points = 1s)
3000
3500
Run 8 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
0
500
1000
1500
2000
Data Point (10 data points = 1s)
2500
3000
3500
Run 9 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
Data Point (10 data points = 1s)
2500
3000
3500
March 3rd 2003
Sebastian Peleato
28
Run 10 Time Series Graph
4
Angular Velocity (rad/s)
3
2
1
0
-1
-2
-3
0
500
1000
1500
2000
Data Point (10 data points = 1s)
2500
3000
Run 11 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
-2.5
0
1000
2000
3000
4000
Data Point (10 data points = 1s)
5000
6000
Run 12 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
2500
3000
Data Point (10 data points = 1s)
3500
4000
4500
March 3rd 2003
Sebastian Peleato
29
Run 13 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
0
500
1000
1500
2000
2500
3000
Data Point (10 data points = 1s)
3500
4000
4500
Run 14 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
2500
Data Point (10 data points = 1s)
3000
3500
4000
Run 15 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
2500
Data Point (10 data points = 1s)
3000
3500
4000
March 3rd 2003
Sebastian Peleato
30
Run 16 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
2500
Data Point (10 data points = 1s)
3000
3500
Run 17 Time Series Graph
2.5
2
Angular Velocity (rad/s)
1.5
1
0.5
0
-0.5
-1
-1.5
-2
0
500
1000
1500
Data Point (10 data points = 1s)
2000
Run 18 Time Series Graph
1.8
1.6
Angular Velocity (rad/s)
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
500
1000
1500
2000
2500
3000
3500
Data Point (10 data points = 1s)
4000
4500
5000
March 3rd 2003
Sebastian Peleato
31
Run 19 Time Series Graph
1.8
1.6
Angular Velocity (rad/s)
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
500
1000
1500
Data Point (10 data points = 1s)
2000
2500
Flow 4
Run 29 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
1000
2000
3000
Data Point (10 data points = 1s)
4000
5000
Run 30 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
Data Point (10 data points = 1s)
2500
3000
3500
March 3rd 2003
Sebastian Peleato
32
Run 31 Time Series Graph
3
Angular Velocity (rad/s)
2
1
0
-1
-2
-3
0
500
1000
1500
2000
Data Point (10 data points = 1s)
2500
3000
3500
March 3rd 2003
Sebastian Peleato
33
Appendix IV: Mathematical Model Source Code
import
import
import
import
java.io.BufferedWriter;
java.io.FileOutputStream;
java.io.FileWriter;
java.io.IOException;
/**
* @author Sebastian Peleato
*Code based on C source from
http://astronomy.swin.edu.au/~pbourke/fractals/lorenz/
*Ported to Java and modified to only display the x value and output to
file
*/
public class wheel {
public static void main(String[] args) throws IOException {
FileWriter out = new FileWriter("chaos.txt");
BufferedWriter fout = new BufferedWriter(out);
//Open a file stream to chaos.txt for writing
int i = 0;
double x0, y0, z0, x1, y1, z1;
//Initialize all parameters
double h = 0.01;
double a = 10.0;
double b = 28; //Comparable to flow rate or r value
double c = 8.0 / 3.0;
x0 = 0.1;
y0 = 0;
z0 = 0;
for (i = 0; i < 20000; i++) {
//Solves the Lorenz equations over 20000 iterations
x1 = x0 + h * a * (y0 - x0);
y1 = y0 + h * (x0 * (b - z0) - y0);
z1 = z0 + h * (x0 * y0 - c * z0);
x0 = x1;
y0 = y1;
z0 = z1;
fout.write(i + " , " + x0);
//Send to file
System.out.println(x0);
//Output to console
}
}
}
March 3rd 2003
Sebastian Peleato
34
Appendix V: Basgen and Fet Settings
basgen
Number of data points:
Time delay (samples):
Embedding Dimension:
Grid Resolution:
2400
1
2
20
fet
Time-step (seconds or iterations):
Evolution Time (number of samples):
Minimum separation at replacement:
Maximum separation for replacement:
Maximum orientation error:
0.1
3
0.1
0.5
30
March 3rd 2003
Sebastian Peleato
35
Works Consulted
Booth, Marlene, Section 4: A Chaotic Waterwheel. n.d. Available [Online]:
http://kendrick.colgate.edu/mboothe/chaos/section4.htm October 12, 2002
Specific information on the behaviour of a Lorenz water wheel.
Donahue III, Manus J., An Introduction to Mathematical Chaos Theory and Fractal Geometry, n.d.
Available [Online]: http://www.duke.edu/~mjd/chaos/chaos.html October 12, 2002
A concise overview of Chaos theory
Gleick, James, Chaos : making a new science. New York: Viking, 1987.
A general investigation of Chaos with a focus on its historical development
Hilborn, Robert C. Chaos and nonlinear dynamics : an introduction for scientists and
engineers / Robert C. Hilborn. Oxford: Oxford University Press, 2000.
Contains a good explanation of some of the math of Chaos. Especially useful for
Lyapunov exponents.
Lorenz, Edward, “Deterministic Nonperiodic Flow”, Journal of The Atmospheric Sciences 20
(March 1963): 130-141
The original paper in which Lorenz detailed his findings
Lorenz, Edward N., The essence of chaos. Seattle : University of Washington Press, 1993.
An overview level book with an emphasis on the science and math of Chaos.
Rulle, David, “Strange Attractors”, Math Intelligencer, Vol 2. (1980): p126-137
A journal article that explains strange attractors in some depth
Williams, Garnett P., Chaos Theory Tamed. Washington: Joseph Henry Press, 1997.
A good explanation of the mathematical techniques used to explore and locate Chaos.