Taylor series review
advertisement

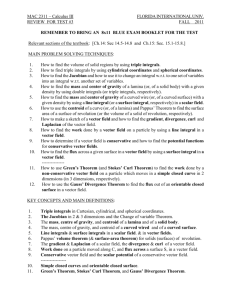
6. Taylor series, Gauss’ and Stokes’ Theorem 1. Taylor series review The method of expanding nearby points of functions and vectors is fundamental to understanding many of the concepts of fluid dynamics and vector calculus. The defining property of a fluid is how it changes shape. By examining the properties of nearby parcels and how they relate to one another, we can mathematically quantify these deformation properties. A brief refresher in how we go about expanding a function about a point is needed to gain the tools necessary to quantify some of these features of a fluid. In the below analysis, it is understood that all functions are uniformly continuous and we will just examine the mathematical results. Assume a power series representation of a function converges about the point x o . The form of a power series for a function of x is: f ( x) c n ( x xo ) n c0 c1 ( x xo ) c 2 ( x xo ) 2 c3 ( x xo ) 3 O( x xo ) 4 n 0 (In the above equation, the expression O( x xo ) 4 means terms of 4th order and higher.) For the above expansion to be defined, it must converge about the center value, xo . This means that the sum of all the infinite terms in the equation above must be a finite value. therefore, higher order terms must become smaller for this to be possible1. The coefficients c0 , c1 , c2 , c3.......... cn can be evaluated by examining the derivatives of f (x) at the point x xo . f ( x ) x xo c 0 d f ( x) x xo f ' ( x) x xo c1 dx f ' ' ( xo ) d2 f ( x) x xo f ' ' ( x) x xo 2c 2 c 2 2 2 dx f ' ' ' ( xo ) f ' ' ' ( x) x xo 3 2 c3 c3 3! f ( n ) ( x) x xo n (n 1) (n 2)....1cn n!cn cn f ( n ) ( xo ) n! The resulting expansion of f (x) , with the coefficients derived above, is called the Taylor series generated by f (x) at x xo . Mathematically it is expressed as: 1 In your calculus courses, you learned of many test for convergence; including the comparison, ratio or root test. Any of those can be applied to the power series to determine if the function is defined. f ( x) n 0 f ( n ) ( xo ) f ' ' xo ( x xo ) n f xo f ' xo ( x xo ) ( x x o ) 2 O( x x o ) 3 n! 2 (1) Notice there are no formal restrictions on the selection of the point x o besides the original requirement that the function must converge. There are some practical limitations however such as choosing x o near the center of the domain, so that we don’t have to consider an overwhelming number of terms for equation (1) to be accurate. To reiterate this point, let us restrict our choice of x o and the domain of x such that x xo x 1 . Then we can express x xo x in equation (1) to obtain f ( xo x) n 0 f ( n ) ( xo ) (x) n f xo f ' xo x O(x 2 ) n! (2) Since we have chosen x to be arbitrarily small compared to x o , it is safe assume the Taylor series approximation is accurate out to the first two terms of the expansion. f ( xo x) f xo f ' xo x (3) For multi-variable functions, the extension to equations (2) and (3) can be rather tedious. The expansions are straightforward however, if we consider expansions of only one variable at a time. By considering variations in only one variable at a time, we are essentially looking at three different 1-D cases of equation (2). We can expand the function, f x, y, z , near the point xo , yo , z o in any of the three spatial directions as shown in equation (4) f ( xo x, y o , z o ) f xo , y o , z o f ( xo , y o y, z o ) f xo , y o , z o f ( xo , y o , z o z ) f xo , y o , z o f x f y f z x Ox 2 xo , y o , z o y Oy 2 (4) xo , y o , z o z Oz 2 xo , y o , z o If we consider variations in all three directions at once, we obtain the vector expression f ( x o x) f x o f x o x O x ^ ^ ^ 2 ^ (5) ^ ^ where x o xo i y o j z o k and x x i y j z k . As a final note, for most theoretical derivations in fluid dynamics, it is assumed that the distance from the central point of the expansion is small enough that a Taylor series expanding out to two terms is sufficient for our calculations. 2. Gauss’ theorem Now that we have reviewed the Taylor Series, we will utilize it to derive another important mathematical concept. In its most common form, Gauss’ Theorem provides a means of relating the flux of a given vector quantity with its associated divergence. Examination of any conserved quantity considers the flux of that quantity through a surface while physical properties such as density and gravity are volumetric quantities. Understanding the principles behind Gauss’ theorem is essential in understanding and relating surface and volumetric quantities. Gauss Theorem: ^ Given a fixed volume V which is bounded by the area A and unit vector n normal to the surface element dA as shown in figure 1, ^ n A ^ n ^ n ^ n Figure 1. Diagram showing an arbitrary fixed volume V and associated surface area A ^ with a unit vector n pointing outward normal to the surface. 2 for a uniformly continuous vector field u x, y, z u i v j w k , Gauss’ Theorem states that ^ u dV u n dA ^ ^ ^ V A (6) Rough proof of Gauss’ Theorem: Consider an infinitesimal cube with sides x, y and z as shown in figure 2 where the center of the cube is at the position xo , yo , z o 2 Image taken and modified from Wikipedia at the following link: http://en.wikipedia.org/wiki/Image:Divergence_theorem.svg Center of box at xo, yo , zo u dx dx u ( xo , yo , zo ) u ( x o , y o , z o ) 2 x 2 u ( xo dx 2 , y o , z o ) u ( xo , y o , z o ) ^ k ^ i Figure 1. Examination of the velocity vector component u at various positions on the infinitesimal cube centered on the point xo , yo , z o Given the notation of figure 1, we can examine the flow at each face of the cube. ^ ^ dx Notice the face at the location ( xo , y o , z o ) has the normal n i and surface area 2 ^ ^ dx element dA dydz while the face at location ( xo , y o , z o ) has the normal n i and 2 the surface area element dA dydz . Using a similar analysis for the faces at locations ^ dy dz ( xo , y o , z o ) and ( x o , y o , z o ) we can expand out u n dA and obtain the 2 2 following: ^ dx dx u n dA u xo , y o , z o dydz u xo , y o , z o dydz 2 2 dy dy v xo , y o , z o dxdz v xo , y o , z o dxdz 2 2 (7) dz dz w xo , y o , z o dxdy w xo , y o , z o dxdy 2 2 u dx , we x can examine how the velocity component vectors vary at each face of the cube. For example, the corresponding expansions for the velocity vector component in the Now using Taylor expansions to first order, u ( x dx, y, z ) u x, y, z ^ i direction are dx u u ( xo , y o , z o ) u xo , y o , z o 2 x And dx u u ( xo , y o , z o ) u xo , y o , z o 2 x dx 2 (8) dx 2 (9) u dx x 2 ^ Thus, substitution of (8) into equation (7), the first term of u n dA is u ( xo dx u dx , y o , z o )dydz u xo , y o , z o dydz dydz 2 x 2 (10) Similarly, substitution of equation (9) into the second term of equation (7) we obtain u ( xo dx u dx , y o , z o )dydz u xo , y o , z o dydz dydz 2 x 2 (11) Adding equations (10) and (11) we obtain the simple result u ( xo dx dx u , y o , z o )dydz u ( xo , y o , z o )dydz dxdydz 2 2 x We can perform a similar analysis on the faces of the box at ( xo , y o dy , z o ) to obtain 2 the result v( xo , y o dy dy v , z o )dxdz v( xo , y o , z o )dxdz dxdydz 2 2 y and on the faces of the box at ( xo , y o , z o w( xo , y o , z o dz ) to obtain the result 2 dz dz w )dxdy w( xo , y o , z o )dxdy dxdydz . 2 2 z We now have all the terms of equation (7). Summing the above results, we obtain ^ u v w dxdydz udV u n dA x y z (12) The above analysis was performed for an infinitesimal cube. If we summed the result of equation (12) for a group of cubes and note that the values cancel where all adjacent faces meet since the unit normal’s are in opposite direction, we obtain a result that represents a Riemannian integral. This integral applies in the limit that we sum over an infinite number of cubes each with volume elements approaching zero. The integral representation is then u n dA u dV ^ A V as desired. It is normal to imply the triple integration for the volume integral and double integration of the area integral and write the result in the more convenient form: ^ u n dA u dV A V 3. Stoke’s Theorem*: Another vector calculus theorem relates the curl of a vector to the vector itself as follows: u n dA u d ^ A (13) The above relationship is called Stoke’s theorem. As you know from your previous Calculus courses, the integral on the right-hand side is called the closed circulation of the vector field u about the boundary . The circulation sums the tangential components of the vector field that lie along the boundary around an arbitrary loop in space as seen in figure 2. u ut Figure 2 – Picture showing an arbitrary loop in space and the orientation of the boundary segment, , and the tangent vector, u t . The circulation consists of the sum of the tangential vector components projections around the entire loop. To go about proving Stokes Theorem, we wish to break up the above figure surface into a series of small squares and calculate the circulation in each infinitesimal square. Figure 3 – Break-up of the surface of figure 2 into infinitesimal squares. Notice how the circulation along the boundary of adjacent square will cancel each other out such that only the circulation along the edge will remain in the final calculation. Now that we see how to break up the surface into small squares, let us examine the circulation about one of the infinitesimal squares. If we imagine that a square is solely in the x-y plane then it would resemble something along the lines of Figure 4. There is nothing to say that it would lie along these specific axes. It is just for simplicity of analysis that we choose this coordinate system and there is no loss in generality in making this assumption anyways. 3 2 u 2 y u y 2 4 u 1 u x 1 1 x Figure 4 – Diagram of one of the infinitesimal squares on the surface chosen solely in the x-y plane. The specific choice of a square shape in the x-y plane allows for easy calculation of the circulation as seen in equation (14). From figure 4, we can se the total circulation is u d u 1x u 2y u 3x u 4y u d u 1 u 3x u 2 u 4y x y x x x y y y (14) We can express u x 3 and u y 4 in terms of u x 1 and u y 2 using a Taylor expansion to first order provided that x and y are small which we already know is true. The expansions are: u x 3 u x 1 u x u y O y 2 u x 1 x y y y And u y 4 u y 2 u y x x Oy 2 u y 2 u y x x Substitution of these expansions into equation (14) yields u d u y u y u x u x yx xy y x y x ^ xy u k dA (15) ^ It is apparent that dotting with the k component in equation (15) is more general to dotting with the normal to the surface; it just so happened in this case that we specifically ^ chose the x-y plane for our square so the normal component was k . The general pattern should be fairly apparent from equation (15) that the circulation around the infinitesimal square is related to the curl of the vector field dotted with the normal to the surface of the square times the surface area of that same square. ^ u d u n dA (16) As a final step, one must generalize back from the infinitesimal square to the general surface. This is a matter of summing up all circulation contributions from all infinitesimal squares and noting that all adjacent boundaries contributions will cancel out with each other. In the Riemannian sense, summing up these circulations along the surface under the limit of x, y 0 for each square is the same as taking the integral on the right side of equation (16). This, more or less, leads to the proof of Stokes theorem as indicated by equation 13): u n dA u d ^ A (13) As before with Gauss’ Theorem, we can imply the double integral of the surface area integral: u n dA u d ^ A