Son1x
advertisement

FINDING WAVENUMBER IN A RECTANGULAR
WAVEGUIDE BY FINITE DIFFERENCE
METHODS
SELİM MİMAROĞLU
Hacettepe University
Electrical and Electronics Engineering Department
ELE 401-ELE 402 Final Project Report
Instructor: Dr. Adnan Köksal
Fall, 1999
ABSTRACT
Finite Difference Methods is one of the most important methods for solving
electromagnetic problems. It is easily understood, more frequently used, and more
universally applicable than any other methods. The finite difference techniques
are based upon approximations, which permit replacing differential equations, by
finite difference equations. By using the Finite Difference Methods the
wavenumber k is found. Firstly initial values for TE and TM waves are defined. 1
matrix is the initial value for TM and a ramp matrix is the initial value for the
TM. SOR is used in these calculations in order to increase the speed of the
calculation. k values are modified and again used in the equations and programs.
Also E and H fields for TM and TE waves are found and compared with the
analytical solutions.
LIST OF CONTENTS
ABSTRACT
ii
LIST OF FIGURES
iii
1. INTRODUCTION
1
2. FINITE DIFFERENCE METHODS
2
3. TM IN RECTANGULAR WAVEGUIDES
5
4. TE IN RECTANGULAR WAVEGUIDES
7
5. FD APPROACH
9
6. ACCURACY AND STABILITY OF FD SOLN.
12
7. RESULTS
16
LIST OF FIGURES
Figure
1.1 a-rectangular grid
b-skew grid
c-triangular grid
d-circular grid
2.1 f(x) function
3.1 rectangular W.G.
5.1 discretized W.G.
6.1 error as a function of the mesh size
Page
1
2
5
10
14
1. INTRODUCTION
The finite difference method (FDM) was first developed by A. Thom in the 1920s
under the title “the method of squares” to solve nonlinear hydrodynamic
equations. Since then, the method has found applications in solving different field
problems. The finite difference techniques are based upon approximations, which
permit replacing differential equations, by finite difference equations. These finite
difference approximations are algebraic in form; they relate the value of the
dependent variable at a point in the solution region to the values at some
neighbouring points.
(a)
(b)
(c)
(d)
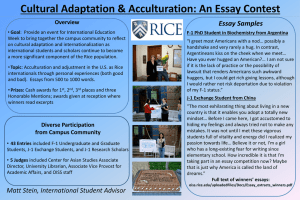
Figure 1.1
(a) rectangular grid, (b) skew grid, (c) triangular grid, (d) circular grid.
Thus a finite difference solution basically involves three steps:
(1) Dividing the solution region into a grid of nodes.
(2) Approximating the given differential equation by finite difference equivalent
that relates the dependent variable at a point in the solution region to its values
at the neighbouring points.
(3) Solving the difference equations subject to the prescribed boundary conditions
and/or initial conditions.
The most commonly used grid patterns for two – dimensional problems are
shown in Fig. 1.1
2. FINITE DIFFERENCE METHODS
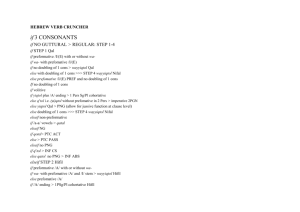
Given a function ƒ(x) shown in Fig.2, we can approximate its derivative,
slope or the tangent at P by the slope of arc PB, giving the forward – difference
formula,
f(x)
P
B
X0
X 0+x
A
X 0–x
x
Figure 2 .1
(x0) =
(x0 + x) – (x0)
x
(2.1)
or the slope of the arc AP, yielding the backward – difference formula,
(x0) =
(x0) – (x0 – x)
x
or the slope of the arc AB, resulting in the central – difference formula,
(2.2)
(x0) =
(x0 + x) – (x0 – x)
2x
(2.3)
We can also estimate the second derivative ƒ(x) at P as
’(x0 + x/2) – ’(x0-x/2)
(x0) = x/2x/2Yx/2)
x
=
1
x
(x0) =
(x0 + x) – (x0) (x0) – (x0 – x)
–
x
x
(x0 + x) – 2(x0) + (x0- x)
(x)2
(2.4)
Any approximation of a derivative in terms of values at a discrete set of points is
called finite difference approximation.
According to the well – known expansion, Taylor’s series approach
(x0 + x) = (x0) + x (x0) +
1
1
(x)2 (x0) + (x)3(x0) + …..
2!
3!
(2.5)
and
(x0 – x) = (x0) – x (x0) +
1
1
(x)2 (x0) –
(x)3 (x0) + . .
2!
3!
(2.6)
Upon adding these expansions,
(x0 + x) + (x0 – x) = 2(x0) + (x)2(x0) + O(x)4
(2.7)
where O(Δx)4 is the error introduced by truncating the series. Therefore, O(Δx) 4
represents terms that are not greater than (Δx) 4 . Assuming that these terms are
negligible. Higher order finite difference approximations can be obtained by taking
more terms in Taylor series expansion. If the infinite Taylor series were retained, an
exact solution would be realized for the problem. However, for practical reasons, the
infinite series is usually truncated after the second-order term. This imposes an error,
which exists in all finite difference solutions.
To apply the difference method to find the solution of a function Φ(x,t), we
divide the solution region in the x – t plane into equal rectangles or meshes of
sides Δx and Δt .We let the coordinates (x,t) of a typical grid point or node be
i = 0, 1, 2, ...
j = 0, 1, 2, ...
x = ix,
t = jt,
and the value if Φ at P be
ΦP = Φ(ix, jt) = Φ(i, j).
(2.8)
With this notation, the central difference approximations of the derivatives of Φ at
the (i,j)th node are obtaıned as follows
Φx i,j =
Φt i,j =
Φ(i + 1, j) – Φ(i – 1, j)
Φ(i, j + 1) – Φ(i, j – 1)
Φxx i,j =
Φtt i,j =
,
2x
,
2t
Φ(i + 1, j) – 2Φ(i, j) + Φ(i – 1, j) ,
(x)2
Φ(i, j + 1) – 2Φ(i, j) + Φ(i, j –1)
(t)2
(2.9)
3. TM IN RECTANGULAR WAVEGUIDES
TM Waves does not have a component of the magnetic field in the direction of
propogation;
Hz 0
The behavior of the TM wave can be analyzed by the equation:
(3.1)
2 xy E z h 2 E z 0
(3.2)
b
y
x a
Fig 3.1. Rectangular W.G.
z
E field in the z direction can be explained interms of x, y and z and z can be
expressed seperately,which we obtain;
E z ( x, y, z ) E z ( x, y)e z
(3.3)
Solve the second –order partial diff. equation:
2
2
h 2 ) Ez( x, y ) 0
2
2
x
y
Using the method of seperatation of variables;
(
(3.4)
E z ( x, y ) X ( x)Y ( y )
(
2
2
h 2 ) X ( x)Y ( y ) 0
2
2
x
y
1 2 X ( x)
1 2Y ( y )
h2 0
2
2
X ( x) x
Y ( y ) y
1 2 X ( x)
1 2Y ( y )
h2
2
2
X ( x) x
Y ( y ) y
(3.5)
both sides must equal a constant in order for the equation to hold for all values of
x and y.
d 2 X ( x)
2
k x X ( x) 0
2
dx
2
d Y ( y)
2
k y Y ( y) 0
2
dy
kc k x k y
(3.6)
The appropriate forms to be chosen must satisfy the boundary conditions.The
2
boundary condition is that :
2
2
n.H=0 (on the surface)
When we apply the B.C. in the x direction
E z (0, y ) 0
E z ( a, y ) 0
(3.7)
X ( x) in the form of sink x x,
kx
m
a
, m 1,2,3......
(3.8)
E z ( x,0) 0
(3.9)
E z ( x, b ) 0
Y(y) in the form of sin k y y
n
, n 1,2,3...
b
When we apply B.C. in the y direction
ky
(3.10)
The solution is:
E z ( x, y ) E0 sin(
m
n
x) sin(
y)
a
b
(3.11)
since
kc k x k y
2
2
2
m n
a b
2
kc
2
2
(3.12)
For the TMnm mode the cutoff frequency is :
( fc) nm
1
2
m
n
( )2 ( )2
a
b
(3.13)
And the cutoff wavelength is:
(c) nm
2
m
n
( )2 ( )2
a
b
(3.14)
4.TE WAVES IN RECTANGULAR WAVEGUIDES
TE Wave must satisfy the following boundary conditions
Ez 0
(4.1)
2 xy H z h 2 H z 0
(4.2)
H z ( x, y, z ) H z ( x, y )e z
(4.3)
2
2
2 2 h 2 H z ( x, y ) 0
y
x
H z ( x, y ) X ( x)Y ( y )
(4.4)
.
When we apply the above conditions in the x-direction, the following results
are obtained:
H z
0
x
H z
0
x
(E y 0) at x 0
(E y 0) at x a
(4.5)
When we apply the above conditions in the y direction, following results are
obtained:
H z
0
y
H z
0
y
(E x 0) at y 0
(E x 0) at y b
(4.6)
General Solution for the TE wave:
m n
H z ( x, y ) H 0 cos
x cos
y
a b
m n
2
kc
a b
2
j j 2 (
(4.7)
2
m 2 n 2
) ( )
a
b
(4.8)
(4.9)
If a>b the cutoff frequency is the lowest when m=1 and n=0
( fc) TE10
1
2a
u
2a
(4.10)
The corressponding cutoff wavelength is
(c) TE10 2a
(4.11)
5.FD APPROACH
The solution of waveguide problems is well suited for finite difference schemes
because the solution region closed. This amounts to solving the Helmholtz or
wave equation
2 Φ + k2 Φ = 0
(5.1)
where Φ = Ez for TM modes or Φ = H z for TE modes, while k is the wave number
given by
k2 = 2 c – 2
(5.2)
5.
The permittivity c of the dielectric medium can be real for a lossless medium or
complex for a lossy medium. We consider all fields to vary with time and axial
distance as exp j(t – z). In the eigenvalue problem of Eq. (5.1), both k and Φ
are to be determined. The cutoff wavelength is c = 2 / kc. For each value of the
cutoff wave number kc , there is a solution for the eigenfunction Φi , which
represents the field configuration of a propagating mode.
To apply the finite difference method, we discretize the cross section of the
waveguide by a suitable square mesh.
Φ(i + 1, j) + Φ(i – 1, j) + Φ(i, j + 1) + Φ(i, j – 1) – (4 – h2k2)Φ(i, j)
=0
(5.3)
where Δx = Δy = h is the mesh size. Equation (5.3) applies to all the free or
interior nodes. At the boundary points, we apply Dirichlet condition (Φ = 0) for
the TM modes and Neumann condition (Φ/n = 0) for the TE modes. This
implies that at point A in Fig.5.1, for example,
ΦA = 0
(5.4)
for TM modes. At point A, Φ/n = 0 implies that Φ D = ΦE so that Eq. (5.1)
becomes
ΦB + ΦC + 2ΦD – (4 – h2k2) ΦA = 0
(5.5)
for TE modes. By applying Eq. (5.3) and either Eq. (5.4) or (5.5) to all mesh
points in the waveguide cross section, we obtain m simultaneous equations
involving the m unknowns (Φ1 , Φ2 , ... , Φm). These simultaneous equations may
be conveniently cast into the matrix equation
(A – I)Φ = 0
(5.6)
or
AΦ = Φ
(5.7)
B
E
D
A
C
Figure 5.1
.
where A is an m x m band matrix of known integer elements, l is an identity
matrix, Φ = (Φ1 , Φ2 , ... , Φm) is the eigenvector, and
= (kh)2 =
2 h
c
2
(5.8)
is the eigenvalue. There are several ways to determining and the corresponding
Φ. We consider two of these options.
The first option is the direct method. Equation (5.6) and (5.7) can be satisfied
only if the determinant of (A – l) vanishes, ie.,
A – I= 0
(5.9)
This result in a polynomial in , which can be solved for the various eigenvalues
. For each , we obtained the corresponding Φ from Eq. (5.3). This method
requires storing the relevant matrix elements and does not take advantage of the
fact that matrix A is sparse. In favor of the method is the fact that a computer
subroutine usually exists that solves the eigenvalue problem in Eq. (5.9) and that
determines all the eigenvalues of the matrix. These eigenvalues give the dominant
and higher modes of the waveguide, although accuracy deteriorates rapidly with
mode number.
The second option is the iterative method. In this case, the matrix elements are
usually generated rather than stored. We begin with
Φ1 = Φ2 = ... = Φm = 1 for
TM we take these values randomly and a guessed value for k,. The field at the
(i,j)th node in the (k+1)th iteration is obtained from its known value in the kth
iteration using
Rij
Φk+1(i, j) = Φk(i, j)
(4 – h2k2)
+
(5.10)
where is the acceleration factor, 1 < < 2, and Rij is the residual at the (i,j)th
node given by
Rij = Φ(i, j) + Φ(i, j – 1) + Φ(i + 1, j) + Φ(i – 1, j) – (4 – h2k2)Φ(i, j)
(5.11)
After three or four scans of the complete mesh using Eq. (10), the value of = h2
k2 should be update using Raleigh formula
Φ ΦdS
k =
Φ dS
2
S
2
(5.12)
2
S
The finite difference equivalent of Eq. (5.12) is
Φ(i, j)
2
k =
Φ(i + 1, j) + Φ(i – 1, j) + Φ(i, j + 1) + Φ(i, j – 1) – 4Φ(i, j)
i = 1j = 1
h2
Φ (i, j)
2
(5.13)
i = 1j = 1
where Φs are the latest field values after three or four scans of the mesh and the
summation is carried out over all points in the mesh. The new value of k obtained
from Eq. (5.13) is now used in applying Eq. (5.10) over the mesh for another three
or four times to give more accurate field values, which are again substituted into
Eq. (5.13) to update k. This process is continued until the difference between
consecutive values of k is within a specified acceptable tolerance.
If the first option is to be applied, matrix A must first be found. To
obtained matrix A is not easy. If there are nx and ny divisions along the x and y
directions, the number of free nodes is
nf = (nx – 1) (ny – 1).
(5.14)
Each free node must be assigned two sets of numbers, one to correspond to m in
Φm and the other to correspond to (i,j) in Φ(i,j).
6.ACCURACY AND STABILITY OF FD SOLUTIONS
The question of accuracy and stability of numerical methods is extremely
important if solution is to be reliable and useful. Accuracy has to the with the
closeness of the approximate solution of exact solutions. Stability is the
requirement that the scheme does not increase the magnitude of the solution with
increase in time.
There are three sources of errors that are nearly unavoidable in numerical
solution of physical problems:
(1) modelling errors,
(2) truncation (or discretization) errors,
(3) round off errors.
Each of these error types will affect accuracy and therefore degrade the solution.
The modelling errors are due to several assumptions made in arriving at the
mathematical model. For example, a nonlinear system may be represented by a
linear PDE. Truncation errors arise from the fact that in numerical analysis, we
can deal only with a finite number of terms from processes, which are usually
described by infinite series. For example, in deriving finite difference schemes,
some higher-order terms in the Taylor series expansion were neglected, there by
introducing truncation error. Truncation errors may be reduced by using finer
meshes, that is, by reducing the mesh size h and time increment Δt. Alternatively,
truncation errors may be reduced by using a large number of terms in the series
expansion of derivatives, that is, by using higher-order approximations. However,
care must be exercised in applying higher-order approximations.
Roundoff errors reflect the fact that computations can be done only with a
finite precision on a computer. This unavoidable sources of errors is due to the
limited size of registers in the arithmetic unit of the computer. Round off errors
can be minimised by the use of double-precision arithmetic. The only way to
avoid round off errors completely is to code all operations using integer
arithmetic. This is hardly possible in most practical situations.
Although it has been noted that reducing the mesh size h will increase
accuracy, it is not possible to indefinitely reduce h. Decreasing the truncation
error by using a finer mesh may result in increasing the round off error due to the
increased number of arithmetic operations. A point is reached where the minimum
total error occurs for any particular algorithm using any given word length. This is
illustrated in Fig. 6.1. The concern about accuracy leads us to question whether
the finite difference solution can grow unbounded, a property termed the
instability of the difference scheme. A numerical algorithm is said to be stable if a
small error at any stage produces a smaller cumulative error. It is unstable
otherwise. The consequence of instability (producing unbounded solution) is
disastrous. To determine whether a finite difference scheme is stable, an error is
defined, n, which occurs at time step n, assuming that there is one independent
variable. We define the amplification of this error time step n+1 as
n+1 = gn
(6.1)
where g is known as the amplification factor. In more complex situations, Eq.
(6.1) becomes
[]n+1 = [G][ ]n
(6.2)
error
total
error
round-off
error
discretization
error
Figure 6.1 mesh size h
where [G] is the amplification matrix. For the stability of the difference scheme, it
is required that Eq. (6.1) satisfy.
n+1 n
or
g 1
(6.3)
For the case in Eq. (6.2) determinant of [G] must vanish, ie.,
det[G] = 0
(6.4)
One useful and simple method of finding a stability criterion for a
difference scheme is to construct a Fourier analysis of the difference equation and
thereby derive the amplification factor. This technique is known as Neumann’s
Method
n
n
n
Φ n+1
= (1– 2r)Φ i + r(Φ i+1 +Φ i–1 )
i
(6.5)
where r = Δt/k(Δx)2. Let the solution be.
Φ ni = An(t)ejkix , 0 x 1
(6.6)
where k is the wave number. Since the differential equation is linear it is
approximated to
Φ ni = A(t)ejkix
(6.7)
Substituting Eq. (6.7) into Eq. (6.5) gives
An+1ejkix = (1 – 2r) An+1ejkix + r(ejkx + e–jkx) Anejkix
(6.8)
or
An+1 = An[1 – 2r + 2coskx].
Hence the amplification factor is
g=
An+1
= 1 – 2r + 2coskx
An
g = 1 – 4r sin2
(6.9)
kx
2
In order to satisfy Eq. (6.3),
1 – 4r sin2
kx
1
2
Since this condition must hold for every wave number k, we take the maximum
value of the sine function so that
1 – 4r – 1
and
r 0
or
r
1
2
and
r 0
Of course, r = 0 implies Δt = 0, which is impractical. Thus
1
0<r 2
(6.10)
7. RESULTS AND DISCUSSION
8.CONCLUSION
9. REFERENCES
1. Matthew N.O. Sadiku, Numerical Techniques in Electromagnetics, 1992, CRC
Press Boca Raton.
2. Robert E. Collin, Foundations For Microwave Engineering, 1992, McGrawHill Singapore.
3. David K. Cheng, Field and Wave Electromagnetics, 1989, Addison-Wesley
Reading,Mass.
4. D. S. Jones, Methods in Electromagnetic Wave propogation, 1991, IEEE Press
New York.
10. APPENDICES
Algorithm of the program
S1: Enter inputs
S2: Calculate necessary parameters
S3: Calculate Matrix A using boundary values
S4: Calculate the summation matrices for new k value
S5: Enter the necessary values for n and m
S6: Calculate analytical solution
S7: Draw FD solution
S8: Draw Analytical solution
S9: Draw the difference between analytical and FD solutions
Computer Programs
Program1
%TE MODE WAVEGUIDE PROBLEM
clear all;
a=input('enter the number of rows
=');
b=input('enter the number of coloumns
=');
w=input('enter the acceleration number 1<w<2
=');
h=input('enter hx=hy=')
%A=randn(a,b);
for i=1:a
for j=1:b
A(i,j)=-b/2+0.5+j;
end
end
B=A;
k=80;f=0;p=1;
c=4-h^2*k^2;
y=a*h
x=b*h
while p>0.01 & f<1000
for i=1:a
for j=1:b
if i==1 & j==1;
A(i,j)=(2*A(i,j+1)+2*A(i+1,j))/c;
elseif i==1 & j~=b & j~=1;
A(i,j)=(A(i,j-1)+A(i,j+1)+2*A(i+1,j))/c;
elseif i==1 & j==b;
A(i,j)=(2*A(i,j-1)+2*A(i+1,j))/c;
elseif j==1 & i~=a & i~=1;
A(i,j)=(A(i-1,j)+A(i+1,j)+2*A(i,j+1))/c;
elseif i==a & j==1;
A(i,j)=(2*A(i-1,j)+2*A(i,j+1))/c;
elseif i==a & j~=1 & j~=b;
A(i,j)=(A(i,j-1)+A(i,j+1)+2*A(i-1,j))/c;
elseif i==a & j==b;
A(i,j)=(2*A(i,j-1)+2*A(i-1,j))/c;
elseif j==b & i~=1 & i~=a;
A(i,j)=(2*A(i,j-1)+A(i-1,j)+A(i+1,j))/c;
else
A(i,j)=(A(i,j-1)+A(i,j+1)+A(i-1,j)+A(i+1,j))/c;
end
end
end
A=(1-w)*B+w*A;
B=A;
for i=1:a
for j=1:b
if i==1 & j==1;
Z(i,j)=2*A(i,j)*(A(i,j+1)+A(i+1,j));
elseif i==1 & j~=b & j~=1;
Z(i,j)=A(i,j)*(A(i,j-1)+A(i,j+1)+2*A(i+1,j));
elseif i==1 & j==b;
Z(i,j)=2*A(i,j)*(A(i,j-1)+A(i+1,j));
elseif j==1 & i~=a & i~=1;
Z(i,j)=A(i,j)*(A(i-1,j)+A(i+1,j)+2*A(i,j+1));
elseif i==a & j==1;
Z(i,j)=2*A(i,j)*(A(i-1,j)+A(i,j+1));
elseif i==a & j~=1 & j~=b;
Z(i,j)=A(i,j)*(A(i,j-1)+A(i,j+1)+2*A(i-1,j));
elseif i==a & j==b;
Z(i,j)=2*A(i,j)*(A(i,j-1)+A(i-1,j));
elseif j==b & i~=1 & i~=a;
Z(i,j)=A(i,j)*(2*A(i,j-1)+A(i-1,j)+A(i+1,j));
else
Z(i,j)=A(i,j)*(A(i,j-1)+A(i,j+1)+A(i-1,j)+A(i+1,j));
end
Y(i,j)=A(i,j)*A(i,j);
end
end
f=f+1;
c=(sum(sum(Z)))/(sum(sum(Y)));
t=(sqrt(4-c))/h;
p=abs((t-k)/t);
k=t;
end
A=normalize(A);
f,k
kc(x,y)
n=input('enter n =
');
m=input('enter m =
');
for i=1:a
for j=1:b
G(i,j)=cos(n*pi*h*(j-1)/x)*cos(m*pi*h*(i-1)/y);
end
end
for i=1:a
for j=1:b
H(i,j)=abs(A(a+1-i,b+1-j)-G(i,j));
E(i,j)=A(a+1-i,b+1-j);
end
end
figure(1);
imagesc(E)
colormap(gray)
title('numerical solution of te')
pause
figure(2);
imagesc(G)
colormap(gray)
title('TE Analytical Solution ')
pause
figure(3);
imagesc(H)
colormap(gray)
pause
yy=(1:a);
xx=(1:b);
figure(4)
mesh(xx,yy,G)
pause
figure(5)
mesh(xx,yy,E)
pause
figure(6)
mesh(xx,yy,H)
pause
figure(7)
subplot(2,2,1), mesh(xx,yy,G)
title('Analytical TE Solution')
subplot(2,2,2), mesh(xx,yy,E)
title('Numerical TE Solution')
subplot(2,2,3), mesh(xx,yy,H)
title('Difference')
Program 2
%TM MODE WAVEGUIDE PROBLEM
a=input('enter the number of rows
=');
b=input('enter the number of coloumns
=');
w=input('enter the acceleration number 1<w<2
=');
A=ones(a,b);B=ones(a,b);Z=zeros(a,b);Y=zeros(a,b);
h=input('enter hx=hy
=')
y=a*h
x=b*h
k=1;f=0;p=1;
c=4-h^2*k^2;
while p>0.01 & f<1000
for i=1:a
for j=1:b
if i==1 & j==1;
A(i,j)=(A(i,j+1)+A(i+1,j))/c;
elseif i==1 & j~=b & j~=1;
A(i,j)=(A(i,j-1)+A(i,j+1)+A(i+1,j))/c;
elseif i==1 & j==b;
A(i,j)=(A(i,j-1)+A(i+1,j))/c;
elseif j==1 & i~=a & i~=1;
A(i,j)=(A(i-1,j)+A(i+1,j)+A(i,j+1))/c;
elseif i==a & j==1;
A(i,j)=(A(i-1,j)+A(i,j+1))/c;
elseif i==a & j~=1 & j~=b;
A(i,j)=(A(i,j-1)+A(i,j+1)+A(i-1,j))/c;
elseif i==a & j==b;
A(i,j)=(A(i,j-1)+A(i-1,j))/c;
elseif j==b & i~=1 & i~=a;
A(i,j)=(A(i,j-1)+A(i-1,j)+A(i+1,j))/c;
else
A(i,j)=(A(i,j-1)+A(i,j+1)+A(i-1,j)+A(i+1,j))/c;
end
end
end
A=(1-w)*B+w*A;
B=A;
for i=1:a
for j=1:b
if i==1 & j==1;
Z(i,j)=A(i,j)*(A(i,j+1)+A(i+1,j));
elseif i==1 & j~=b & j~=1;
Z(i,j)=A(i,j)*(A(i,j-1)+A(i,j+1)+A(i+1,j));
elseif i==1 & j==b;
Z(i,j)=A(i,j)*(A(i,j-1)+A(i+1,j));
elseif j==1 & i~=a & i~=1;
Z(i,j)=A(i,j)*(A(i-1,j)+A(i+1,j)+A(i,j+1));
elseif i==a & j==1;
Z(i,j)=A(i,j)*(A(i-1,j)+A(i,j+1));
elseif i==a & j~=1 & j~=b;
Z(i,j)=A(i,j)*(A(i,j-1)+A(i,j+1)+A(i-1,j));
elseif i==a & j==b;
Z(i,j)=A(i,j)*(A(i,j-1)+A(i-1,j));
elseif j==b & i~=1 & i~=a;
Z(i,j)=A(i,j)*(A(i,j-1)+A(i-1,j)+A(i+1,j));
else
Z(i,j)=A(i,j)*(A(i,j-1)+A(i,j+1)+A(i-1,j)+A(i+1,j));
end
Y(i,j)=A(i,j)*A(i,j);
end
end
f=f+1;
c=(sum(sum(Z)))/(sum(sum(Y)));
t=sqrt(4-c)/h;
p=abs((t-k)/t);
k=t;
end
A=normalize(A);
f,k
kc(x,y)
n=input('enter n = ');
m=input('enter m = ');
for i=1:a
for j=1:b
G(i,j)=sin(n*pi*h*(j)/x)*sin(m*pi*h*(i)/y);
D(i,j)=abs(A(a+1-i,b+1-j)-G(i,j));
E(i,j)=A(a+1-i,b+1-j);
end
end
figure(1);
imagesc(E)
colormap(gray)
title('numerical solution TM’)
pause
figure(2);
imagesc(D);
colormap(gray);
title('error in TM,error of k=%0.95');
pause
figure(3);
imagesc(G);
colormap(gray);
title('analytic sol. of TM,n=1,m=1,kc=211');
pause
yy=(1:a);
xx=(1:b);
figure(4)
mesh(xx,yy,G)
pause
figure(5)
mesh(xx,yy,E)
pause
figure(6)
mesh(xx,yy,D)
pause
figure(7)
subplot(2,2,1), mesh(xx,yy,G)
title('Analytical TM Solution')
subplot(2,2,2), mesh(xx,yy,E)
title('Numerical TM Solution')
subplot(2,2,3), mesh(xx,yy,D)
title('Difference')