Modeling Chemical Reactions
advertisement

Created by: Claudia Neuhauser
Worksheet 10: Kinetics
Modeling Chemical Reactions
The law of mass action has its origin in modeling chemical reactions. Consider the
chemical reaction between the molecules of type A and B:
k
A B
C
The quantities A and B on the left-hand side are called the reactants; the quantity C is
called the product. The parameter k is the rate constant. A macroscopic model of this
reaction assumes that the concentrations and reaction constants are well-defined.
Furthermore, the concentrations vary deterministically and continuously. This leads us to
describing the reaction by a differential equation. We model this reaction as
(1)
d [C ]
k[ A][ B]
dt
where brackets denote concentrations. The idea behind this law is that this reaction rate
depends on how often the molecules A and B collide. In a well-mixed vessel, this
collision rate is proportional to the product of the concentrations of A and B, denoted by
[A] and [B], respectively. The law of mass action is not a law in the strict sense, but it is a
good approximation when the assumptions for the macroscopic model description hold.
To determine the units of the rate constant, we compare the left-hand side and the
right-hand side of Equation (1). The concentration of the reactants A and B and the
product C are measured in [moles/liter]. Hence, the unit on the left-hand side is
[moles/liter][time]-1. On the right-hand side, the unit of [A][B] is [moles/liter]2. Hence,
the unit of k must be [moles/liter]-1[time]-1.
Task 1
Consider the following chemical reaction
k
A B
(a) Use the macroscopic modeling approach and determine the differential equation that
describes how the concentration of B changes over time. (b) Use the macroscopic modeling
approach and determine the differential equation that describes how the concentration of
A changes over time. (c) What are the units of k if the concentrations of A and B are
measured in [moles/liter]?
Chemical reactions may be linked. For instance, consider the set of chemical reactions
k1
A B C
k2
2C B D
k3
D A
-1-
Worksheet 10: Kinetics
There are four types of molecules. To describe the changes in concentration of these four
molecules, we need four differential equations.
(2)
d [ A]
k1[ A][ B] k3[ D]
dt
d [ B]
k1[ A][ B] k2 [C ]2
dt
d [C ]
k1[ A][ B] 2k2 [C ]2
dt
d [ D]
k2 [C ]2 k3[ D]
dt
Task 2
Determine the units of the rate constants
k1 , k2 and k3 in Equation (2).
Task 3
Consider the following set of chemical reactions
k1
3A B
k2
2B 2 A C
k3
C 4A
Assume that the assumptions for the macroscopic modeling apply. Find the system of
differential equations that describes these chemical reactions. Determine the units of the
rate constants k1 , k2 and k3 .
Enzymatic Reactions
Many biochemical reactions utilize enzymes. An enzymatic reaction that transforms the
substrate S into a product P requires the formation of a complex C between the substrate
and the enzyme E. After formation of the product P, the enzyme E is released. This is
summarized in the reaction
k1
k2
C
S E
P E
k1
We assume that the reaction from substrate plus enzyme to substrate/enzyme complex
occurs at rate k1 and the reverse reaction at rate k 1 . The reaction from the
substrate/enzyme complex to the product plus enzyme occurs at rate k 2 . Models for this
-2-
Worksheet 10: Kinetics
reaction were first studied by Michaelis and Menten (1913)1 under simplified
assumptions. A more realistic model was developed by Briggs and Haldane (1925)2,
which is still the basis for models of more complicated enzymatic reactions.
If we use the notation s [ S ], e [ E ], c [C ] , and p [P ] , then an application of
the mass action law yields
ds
k 1c k1se
dt
de
k 1 k 2 c k1se
dt
dc
k1se k 2 k 1 c
dt
dp
k2c
dt
de dc
0 . This implies that
dt dt
e c constant, and we say that e c is a conserved quantity. At time 0, we assume
that s s0 , e e0 , c 0, and p 0 . This implies that the constant e c is equal to e0 .
We see from this system of equations that
Since e e0 c , we no longer need an equation for the enzyme concentration e. This
reduces the system to three equations.
Using e e0 c , we can write the first two equations of the system of differential
equations so that they will only contain the variables s and c:
ds
k 1c k1 s (e0 c)
dt
dc
k1 s (e0 c) (k 2 k 1 )c
dt
Rearranging terms, the system of three equations can be written as
1
2
Michaelis, L. and M.I. Menten. 1913. Die Kinetik der Invertinwirkung. Biochem. Z. 49: 333-369.
Briggs, G.E. and J.B.S. Haldane. 1925. A note on the kinematics of enzyme actions.
Biochemical Journal 19: 338-339.
-3-
Worksheet 10: Kinetics
(3)
ds
k1 k1s c k1e0 s
dt
dc
k2 k1 k1s c k1e0 s
dt
dp
k2 c
dt
with initial conditions s(0) s0 , c(0) c0 , and p(0) p0 . The following Matlab code
solves these three equations with the given initial condition and rate constants.
% Solving the Michaelis-Menten Model
mm.m
k1=1e3;
km1=1;
k2=0.05;
e0=0.5e-3;
options=[];
[t,y]=ode23(@mmfunc,[0,1000],[1e-3 0 0],options,k1,km1,k2,e0);
s=y(:,1);
c=y(:,2);
e=e0-c;
p=y(:,3);
semilogx(t,s,'r',t,e,'b',t,c,'g',t,p,'c');
legend('[S]','[E]','[C]','[P]');
% Michaelis-Menten Function mmfunc.m
function dydt = f(t,y,k1,km1,k2,e0)
% s=y(1), c=y(2), p=y(3)
dydt=zeros(3,1);
dydt(1) = (km1+k1*y(1))*y(2)-k1*e0*y(1);
dydt(2) = -(k2+km1+k1*y(1))*y(2)+k1*e0*y(1);
dydt(3) = k2*y(2);
-4-
Worksheet 10: Kinetics
-4
12
x 10
[S]
[E]
[C]
[P]
10
concentration
8
6
4
2
0
-2
-1
10
0
10
1
10
time
2
10
3
10
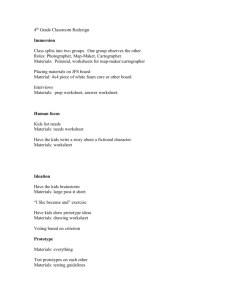
Figure 1: Time dependence of the solution of the Michaelis-Menten model with parameters given in the
Matlab code.
We see that eventually all the substrate is used up and the reaction ceases. That is, as
t , s c 0 , e e0 , and p s0 .
Analytical Solution under Quasi-steady State Approximation
To analyze this system further, we will use the technique of non-dimensionalization. The
idea is to change the variables appropriately so that they are dimensionless. There is no
unique way of doing this and it takes experience and intuition on how to proceed. Segel
(1972)3 wrote an excellent article on the art of scaling and simplification.
We start by dividing the differential equations for s and c by k1e0 s 0 :
3
Segel, L.A. 1972. Simplification and Scaling. SIAM Rev. 14: 547-571.
-5-
Worksheet 10: Kinetics
k k s s
ds
1 1 c
k1e0 s0 dt
k1e0 s0
s0
k k k s s
dc
2 1 1 c
k1e0 s0 dt
k1e0 s0
s0
If we set
s
c
and x , then
s0
e0
k
d
1 x
k1e0 dt k1 s 0
k k 1
dx
2
x x
k1 s0 dt
k1 s0
Let’s change the time scale and introduce k1e0 t , then, with
e0
, we have
s0
d k 1
x
d k 1 s 0
If we set
k k 1
dx
2
x
d
k1 s 0
k 2 k 1
k
and 1 , then
k1 s0
k1 s0
d
x
d
dx
x
d
Quasi-steady State Approximation
In biochemical reactions, typically, e0 is much smaller than s0, which makes ε a very
dx
small quantity. It follows that
is close to 0 and this insight was used by Briggs and
d
dx
0 . It follows that
Haldane (1925) to justify the “quasi-steady state approximation”
d
-6-
Worksheet 10: Kinetics
x
and hence
d
( )
d
or, after simplifying,
d
( )
d
Now,
k2
0 and we set q . Then
k1 s0
d
q
d
Using the original variables, we find for the velocity of the reaction
(4)
V
v s
dp
ds
m
dt
dt K m s
k 1 k 2
is the half-saturation constant and vm k 2 e0 is the maximal
k1
reaction rate. Equation (4) is the classical Michaelis-Menten equation. This equation
models the initial rate at which substrate is converted into the product. During this initial
period, the formation and the break-up of the enzyme-substrate complex reaches a quasisteady state before product formation becomes noticeable.
where K m
Lineweaver-Burk transformation
vm s
is called the Michaelis-Menten function. It is an important
Km s
function and it is used to fit data to determine v m and K m .
To determine v m and K m , the Lineweaver-Burk transformation is frequently
applied. Writing
The function V
1 Km 1 1
V
vm s vm
-7-
Worksheet 10: Kinetics
we see that in a graph where the horizontal axis is 1/s and the vertical axis is 1/V, the
relationship is a straight line. The intercepts allow us to estimate v m and K m .
Reading Assignment (due on _________________________)
Read the paper by Hasty et al. 2000.
Computer Lab (Homework due _________________________)
Step 1
The following data set describes the degradation of a substance with concentration s. The
velocity of the reaction V as a function of s was measured. Use the Lineweaver-Burk
1 Km 1 1
transformation
to find v m and K m . That is, plot 1/V as a function of 1/s
V
vm s vm
and use a regression line to find the equation of the straight line fitted to this transformed
data. Use the equation to then find the two parameters v m and K m .
Velocity V
Substrate
Concentration s
0.025
0.033
0.042
0.081
0.11
0.175
0.17
0.2
0.21
0.22
0.04
0.07
0.12
0.25
0.42
0.8
0.92
1.7
2.9
4.3
Step 2
k 1 k 2
k1
Use EXCEL to graph Km as a function of k1 and use calculus to show that Km is a
decreasing function of k1, i.e., differentiate Km with respect to k1, and show that the
derivative is negative. (For the graph, set k1 0.05 and k2 0.5 and let k1 vary between
0.3 and 5.0 in steps of 0.1.)
The half-saturation constant Km is called the affinity. We found K m
-8-
Worksheet 10: Kinetics
Step 3
(a) Set vm 0.2 , Km 0.3 , and s (0) 1 . Use the Euler method to numerically
approximate the solution of
v s
ds
m
dt
Km s
for t [0, 20] (set the step size equal to 0.01).
(b) Now vary Km between 0.1 and 0.9 (stepsize equal to 0.2). For each value of Km, find
the time at which the concentration of the substrate is half its initial value (i.e., 0.5).
Graph this time as a function of Km and use a linear regression line to predict the time
when K m 1.3 . Check your prediction using the numerical approximation.
Step 4
Complete Tasks 1-3.
-9-
Worksheet 10: Kinetics
Gene Regulatory Networks
Cells control their functions through regulating gene expressions. Many of these
regulatory processes are at the level of gene transcription. A common framework for
modeling these interactions is biochemical reactions. This deterministic framework
ignores fluctuations and can be considered as describing the time evolution of the means
of various quantities of interest.
We will use the example given in Hasty et al. (2000)4 to introduce this kind of
modeling. Their work is motivated by the lysis-lysogeny decision of the bacterial phage
lambda. Their first model, which we will study, is a mutant system with two operators,
OR2 and OR3. The gene encodes for a repressor protein that dimerizes and binds to
either operator. The dimerized protein enhances transcription if it binds to OR2, and
represses transcription when it binds to OR3. We use the notation in Hasty et al. to
explain the dynamics. We denote by X the repressor, by X2 the dimerized repressor, and
by D the DNA promoter site. Then
K1
X2
2 X
(5)
K2
DX 2
D X 2
K3
DX 2*
D X 2
K4
DX 2 X 2
DX 2 X 2
Here, DX 2 and DX 2* denote the dimerized proteins that bind to OR2 and OR3,
respectively. DX 2 X 2 denotes binding to both operators. The constants K i are forward
equilibrium constants. That is, if a biochemical reaction is described by
B
A
k1
k1
then, the corresponding rate equation is
d [ A]
k1[ A] k1[ B]
dt
and at equilibrium,
[ B]
k1
[ A]
k1
The forward equilibrium constant would be K1
4
k1
.
k 1
Hasty, J., J. Pradines, M. Dolnik, and J.J. Collins. 2000. Noise-based switches and amplifiers for gene
expression. PNAS, 97(5): 2075-2080.
- 10 -
Worksheet 10: Kinetics
The reactions in (5) are fast compared to transcription and degradation, the slow
reactions. These are given by
(6)
kt
DX 2 P
DX 2 P nX
kd
X
A
where P is the concentration of RNA polymerase and n is the number of proteins per
mRNA transcript. Note that the arrows in these two reactions only point in one direction,
reflecting that these reactions are irreversible.
Hasty et al. (2000) considered an in vitro system where this small gene regulatory
network is contained in a plasmid and the whole system contains a large number of
plasmids to justify the rate equation approach. We define the following variables:
x [ X ] , y [ X 2 ] , d [ D ] , u [ DX 2 ] , v [ DX 2* ] , and z [ DX 2 X 2 ] . Then the
evolution of the repressor protein is given by
(7)
dx
2k1 x 2 2k1 y nkt p0u kd x r
dt
where r is the expression rate of the gene in the absence of transcription factors.
Assuming that the reaction in (5) are fast compared to the ones in (6), we can again use a
quasi-steady state approach and assume that the reactions in (5) are at equilibrium. We
assume that K3 1K2 and K3 2 K 2 . This implies that
y K1 x 2
u K 2 dy K1 K 2 dx 2
v 1 K 2 dy 1 K1 K 2 dx 2
z 2 K 2uy 2 K1 K 2 dx 4
2
It is further assumed that the total concentration of DNA promoter sites, denoted by dT ,
is constant. That is,
dT d u v z d 1 (1 1 ) K1K 2 x 2 2 K12 K 22 x 4
It can be shown that Equation (7) simplifies to
(8)
dx
x2
x 1
dt 1 (1 1 ) x 2 2 x 4
- 11 -
Worksheet 10: Kinetics
where x x K1K 2 , t t (r K1K 2 ) , nkt p0 dT / r , and kd /(r K1K 2 ) .
To find equilibria, we set the right hand side of (8) equal to 0. that is,
x2
x 1
1 (1 1 ) x 2 2 x 4
g ( x)
f ( x)
If we plot f ( x) and g ( x ) in the same coordinate system, the points of intersection are
the respective equilibria.
The following Matlab program both solves the differential equation (6) and plots
the two functions f ( x) and g ( x ) in the same coordinate system.
% Solving the Hasty Model
hasty.m
alpha=50;
gamma=5;
sigma1=1;
sigma2=5;
options=[];
[t1,y1]=ode23(@hastyfunc,[0,10],[0],options,alpha,gamma,sigma1,sigma2);
[t2,y2]=ode23(@hastyfunc,[0,10],[1],options,alpha,gamma,sigma1,sigma2);
x=0:0.01:2;
f=alpha*x.^2./(1+(1+sigma1)*x.^2+sigma2*x.^4);
g=gamma*x-1;
subplot(1,2,1), plot(x,f,'k',x,g,':k');
xlabel('repressor concentration');ylabel('f(x) and
g(x)');legend('f(x)','g(x)');title('Equilibria');
subplot(1,2,2), plot(t1,y1,'--k',t2,y2,'k');
xlabel('time');ylabel('repressor
concentration');legend('x(0)=0','x(0)=1');title('Dynamics');
% Hasty Model hastyfunc.m
function dydt = f(t,y,alpha,gamma,sigma1,sigma2)
% x=y(1)
dydt=alpha*y(1)^2/(1+(1+sigma1)*y(1)^2+sigma2*y(1)^4)-gamma*y(1)+1;
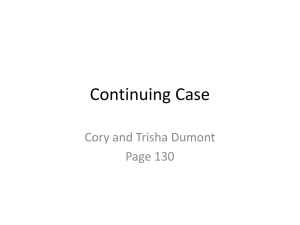
We will investigate this model for different values of to understand Figure 1 in Hasty
et al.
- 12 -
Worksheet 10: Kinetics
Task 4
13 , 15, and 17. Relate the outcome of
Use the Matlab code and simulate the model for
your simulations to Figure 1B (mutant case).
Figure 2: Figure 1B from Hasty et al. 2000
Introducing Noise (Optional)
Hasty et al. introduce noise into this system. While we will not numerically solve the
dynamics of the other models in this paper, we will introduce the notion of noise. Noise is
often modeled using Brownian motion or the Wiener process. The standard Wiener
process is denoted by W (t ) . It is a stochastic process defined on the interval [0, T ] with
the following properties:
(1) W (0) 0
(2) For 0 s t T ,
W (t ) W ( s )
t s N (0,1)
where N (0,1) is a normal distribution with mean 0 and variance 1.
(3) For 0 s t u v T , W (t ) W ( s) and W (v) W (u ) are independent.
To simulate this process in Matlab, note that randn generates a realization of the
distribution N (0,1) .
- 13 -
Worksheet 10: Kinetics
%Simulation of the Wiener process brown.m
T=1;
n=500;
dt=T/n;
randn('state',100); %initializing random number generator
dW=sqrt(dt)*randn(1,n); %generating increments
W=cumsum(dW); %computing cumulative sum
plot([0:dt:T],[0,W],'-k');
xlabel('Time t'); ylabel('W(t)');
This noise process can be added to a deterministic differential equation in the following
way
dx
x2
x 1 (t )
dt 1 (1 1 ) x 2 2 x 4
where we dropped the “tilde” throughout. The term (t ) is white noise. Its mean is 0 and
its covariance is cov( (t ), (t ')) D (t t ') where D is proportional to the strength of
perturbation. We can also write formally
(t ) D
dW
dt
(This is only a formal derivative since the derivative of the Wiener process does not exist
with probability 1.)
- 14 -