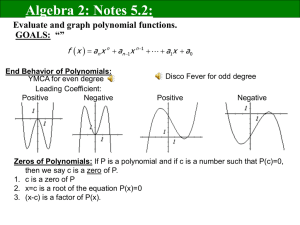
Polynomial Transformation
advertisement

Polynomial Transformations page 1 Polynomial Transformation J. Michael Fitzpatrick CS 359, Fall 2007 BT T B A Note that, unlike in our previous transformations, T goes from the transformed image back to the untransformed image. We do this because it is difficult to find the inverse of nonrigid transformations. The form of T for a 2D polynomial transformation: x a0,0 a1,0 x a0,1 y a1,1 xy a2,0 x 2 a0,2 y 2 y b0,0 b1,0 x b0,1 y b1,1 xy b2,0 x 2 b0,2 y 2 (1) Note that x and y denote positions in BT while the primed coordinates denote positions in B. These equations can be written more concisely as follows: I J x ai , j x i y j i j I J y bi , j x y i i (2) j j In some cases, the summation is limited to polynomials of a specified degree D, in which case I = J = D and ai , j = bi , j = 0 for i j D . If we know the coefficients, we can calculate the x and y in B for any x, y in BT. By calculating them for every x, y in the overlap area (cross-hatched) only, and using interpolation in B to find the intensity to map into BT, we can transform B into BT in that area for the purpose of overlaying the transformed B onto A. How to find the coefficients? By registration, in one of two ways—point registration or intensity registration. Point registration may be used as an initiation step for intensity registration. We look at that approach here. Polynomial Transformations page 2 Point registration with polynomial transformations. With point registration, we identify, perhaps visually, a set of point correspondences: xn , yn xn , yn , (3) where m ranges from 1 to N. We use those correspondences to determine the ai , j and bi , j . These are separate problems for a polynomial transformation. The ai , j are determined by three inputs for every value of n: xn , yn xn (4) and the bi , j are also determined by three inputs for every value of n: xn , yn yn . (5) We consider the case I = J = 1 and N = 5. We first find the ai , j . We consider the 5 equations relating the unprimed x’s to the primed x’s and y’s: x1 a0,0 a1,0 x1 a0,1 y1 a1,1 x1 y1 x2 a0,0 a1,0 x2 a0,1 y2 a1,1 x2 y2 (6) x5 a0,0 a1,0 x5 a0,1 y5 a1,1 x5 y5 We note that if we form a column vector of primed x coordinates: x1 x 2 x x3 , x4 x5 form a matrix P of combinations of powers of x and y that occur in Eqs. (6): (7) Polynomial Transformations 1 1 P 1 1 1 x1 x2 x3 x4 x5 y1 y2 y3 y4 y5 x1 y1 x2 y 2 x3 y3 , x4 y 4 x5 y5 page 3 (8) and form a column vector c x of coefficients that appear in Eqs. (6), c x a0,0 a 1,0 , a0,1 a1,1 (9) then we can write those equations this way: x1 1 x 1 2 x3 1 x4 1 x5 1 or simply x1 x2 x3 x4 x5 y1 y2 y3 y4 y5 x1 y1 a0,0 x2 y 2 a1,0 x3 y3 a0,1 x4 y 4 a1,1 x5 y5 x Pc x . (10) (11) The analogous equations for y, can be written this way, y1 1 y 1 2 y3 1 y4 1 y5 1 or simply x1 x2 x3 x4 x5 y1 y2 y3 y4 y5 y Pc , y where c y is defined similarly to c x : x1 y1 b0,0 x2 y 2 b1,0 x3 y3 b0,1 x4 y 4 b1,1 x5 y5 (12) (13) Polynomial Transformations c y b0,0 b 1,0 . b0,1 b1,1 page 4 (14) At this point we have two problems to solve—the x problem and the y problem. We solve each of them separately and, because there are more equations than there are unknowns (for this case 5 equations in 4 unknowns), we find the least-squares solution for each of them. 2 The least-squares solution to Eq. (11) is the one for which Pc x x is minimized. Note that the unknowns here are the coefficients in c x , not the coordinates in x . There are standard methods for doing this. One of the best methods employs singular-value decomposition of P: P U V t , where U and V are orthogonal matrices of size 5 by 5 and 4 by 4 respectively and diag 1, 2 , 3 , 4 ,0 . The lambdas are the singular values of P in decreasing order of size. They are never negative. The least-square solution is given by 1 1 1 1 (15) c x V diag , , , ,0 U t x . 1 2 3 4 Similarly for the y problem, 1 1 1 1 c y V diag , , , ,0 U t y . 1 2 3 4 (16) A problem will arise if any of the lambdas equal zero. This will happen if all the points xi yi lie on the same straight line. This least-squares solution can be found very simply in Matlab. We make these definitions xp x; yp y ; (17) P P; and the least-squares solution is found by dividing xp and yp on the left by P : cx P \ xp; cy P \ yp; (18) Then, c x = cx and c y = cy . Once c x and c y have been determined, it is a simple matter to transform new points, Polynomial Transformations c x 1 a0,0 a1,0 a0,1 a1,1 1 x t b y 0,0 b1,0 b0,1 b1,1 x c y x y y . xy xy page 5 t (19) Which in Matlab becomes: xp cx ' r; yp cy ' r; where r 1 x y xy (20)