A Time-Varying Model for Disturbance Storm-Time (Dst - care
advertisement

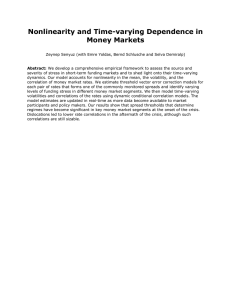
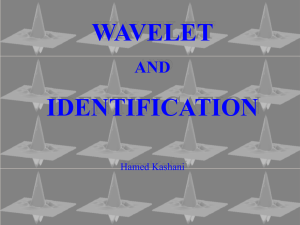
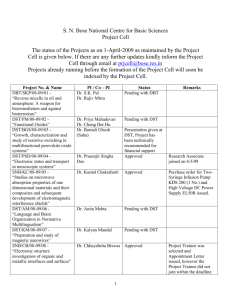
A Time-Varying Model for Disturbance StormTime (Dst) Index Analysis Presentation: Yang Li (Phd student) Supervisor: Prof. Billings S.A. and Dr. Hua-Liang Wei Department of Automatic Control and Systems Engineering, the University of Sheffield 1. Background 1) Empirical modelling approach ----some physical insights or assumptions 2) Time-invariant system identification approach ----family of NARMAX ----advantage and disadvantage 3) Time-varying system identification approach ---- wavelet basis function approximation (a) model coefficients approximated by wavelet basis function (b) multi-resolution wavelet decompositions 2. Time-Varying ARX Model 1) TVARX process: P Q y t ai t y t i bk t u t k e t i 1 k 0 where time-varying parameters : model orders : P , Q model residual : e t ai t , bk t (1) Expanding ai t and bk t by wavelet basis function L a i t i ,m m t , m 1 L b k t k ,m m t m 1 where expansion parameters : i ,m , k ,m set of basis functions: m t , m 1, 2, , L. (2) Substituting (2) into (1), yields, P Q L L y t i ,m m t y t i k ,m m t u t k e t i 1 m 1 (3) k 1 m 1 new variables can be defined: ym t i m t y t i , um t k m t u t k . (4) Q (5) Substituting (4) into (3), yields, P L L y t i ,m ym t i k ,mum t k e t , i 1 m 1 k 1 m 1 model (5) in the form of matrix: y t T t t e t (6) where T regression vector: t ym t 1 , , ym t P , um t 1 , , um t Q coefficient vector: t 1,m , , P,m , 1,m , , Q,m T The definition of time-dependent spectrum: ˆ t e j 2 f / f s b k 0 k Q H f ,t 1 i 1 aˆi t e j 2 f / f s P 2 (7) 3. The Multi-Wavelet Basis Functions B-spline function of m-th order: x m x Nm x Nm1 x Nm1 x 1 , m 1 m 1 with 1 N1 x 0,1 x 0 if x 0,1 otherwise m2 . (Haar funciton) (8) (9) fourth-order B-spline: where 1 4 4 j 3 x N 4 x 1 x j , 6 j 0 j xn x n for x 0 and xn 0 for x 0. (10) coefficients expression ai t and bk t by B-spline function: N ai t i,ql l q t lq N bk t k ,qll q t l q N i,rl l r t lr l r where 1 q r s 4, t 1, 2, N j ,rll r t , N, recursive coefficient: i ,l and k ,l . N i,sl l s t l s N j ,sll s t l s (11) 4. Model Identification and Parameter Estimation 1) Identification and parameter estimation algorithm normalized least mean square (NLMS), 2) model order determination: Bayesian information criterion (BIC), BIC n N n ln N 1 N n MSE n , (12) where mean-squared-error (MSE): 1 MSE N N y t yˆ t t 1 2 , (13) 5. Dst index Modelling and Analysis 1) Modelling data Input VBs[mV/m] 15 10 5 0 0 200 400 600 800 1000 1200 0 200 400 600 Time [Hours] 800 1000 1200 Output Dst[nT] 100 0 -100 -200 -300 Fig,1 The input (the solar wind parameter VBs) and the output (the Dst index) measured, with the sampling interval of 1-h. A total of 1176 observation, with a time resolution of -1-h, were involved. 2). Result analysis 0 0 0 200 400 600 800 1000 2 -1 0 0.5 -2 0 200 400 600 800 1000 1 3 a (t) 0 0 -1 200 400 600 800 200 400 600 800 1000 0 200 400 600 800 1000 0 200 400 800 1000 0 -0.5 -1 0 0 1 2 b (t) 1 -1 a (t) 1 b (t) 1 a (t) 2 0.5 1000 b (t) 4 1 2 a (t) 2 0 0 -1 -0.5 0 200 400 600 Time [hours] 800 1000 600 Time [hours] Fig. 2. The estimates of the six time-varying coefficients ai(t) (i=1,2,3,4) output estimated parameters and bk(t) (k=0,1,2) input estimated parameters for the magnetosphere data. 50 0 Dst [nT] -50 -100 -150 -200 Measurements OSA (OHA) -250 0 200 400 600 Time [hours] 800 1000 1200 Fig. 3, on the left hand side: A comparison of the recovered signal (one-step-ahead (1-h-ahead) predictions) from the identified TVARX (4, 2) model and the original observations for the magnetosphere data. Solid (blue) line indicates the observations and the dashed (red) line indicates the signal recovered from the TVARX (4, 2) model. On the right hand side: the 3-D topographical map of the time-dependent spectrum estimated from the TVARX (4, 2) model for the magnetosphere system data. Figure 4 The overlap of the transient power spectra calculated at different time instants from the limited 1176 observation data for the problem described by (6). 6. Conclusions 1) modelling approach are locally defined. ---- more flexible and adaptable 2) time-dependent spectrum of transient properties. ---- the global dynamical behaviour Thank you!