IV. Kinematics of Fluid Motion
Contents
1.
Specification of Fluid Motion
2.
Material Derivatives
3.
Geometric Representation of Flow
4.
Terminology
5.
Motion and Deformation of Fluid Element
6.
Rotational and Potential Flows
7.
Continuity Equation
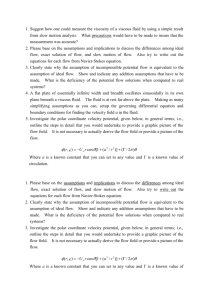
1. Specification of Fluid Motion
Lagrangian View
Study fluid motion by tracing the
motion of fluid particles
Identify a representative fluid particle
Determine its position instantaneously
Determine the velocity and acceleration
Determine other physical quantities
t = 0
r
x
t = t
r
r
P osition
r
r
r
r = r (t ; x )
Velocit y
r
r
¶r
u =
¶t
2r
Accelerat ion
r
¶ r
a =
¶t2
Eulerian View
Study fluid motion by investigating the
temporal and spatial variation of the flow
field
Velocit y
r
r r
v = v (x , t )
Acceleration
r
r r
a = a (x , t )
2. Material Derivatives
Definition
The rate of change one observed when
following the motion of a fluid particle
t+ t
( x+ x, y+ y, z+ z )
t
( x,y,z )
t t
B xi , t
t t t
B (x + D x , y + D y , z + D z , t + D t ) = B (x , y , z , t ) +
DB
¶B
Dx ¶ B
Dy ¶ B
Dz ¶ B
=
+
+
+
Dt
¶t
Dt ¶ x
Dt ¶ y
Dt ¶ z
¶B
¶B
¶B
¶B
®
+ u
+ v
+ w
¶t
¶x
¶y
¶z
DB
Dt
Dt
Material Derivative
D
¶
¶
¶
¶
=
+ u
+ v
+ w
Dt
¶t
¶x
¶y
¶z
Local / Temporal
Advective / Spatial
Acceleration of Fluid particles
r
r
r
r
r
r
Du
¶u
¶u
¶u
¶u
a =
=
+ u
+ v
+ w
Dt
¶t
¶x
¶y
¶z
¶u
¶u
¶u
¶u
ìï
ïï ax =
+ u
+ v
+ w
¶
t
¶
x
¶
y
¶z
ïï
ïï
ïí a = ¶ v + u ¶ v + v ¶ v + w ¶ v
ïï y
¶t
¶x
¶y
¶z
ïï
ïï a = ¶ w + u ¶ w + v ¶ w + w ¶ w
ïïî z
¶t
¶x
¶y
¶z
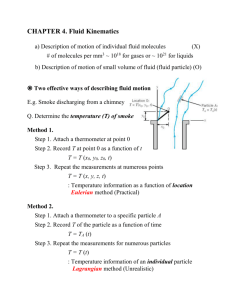
3. Geometric Representation of Flow
Pathline
A pathline is the trajectory of a fluid particle
t3
t2
t1
t0
Mathematical representation
r
r
r ér r
r
dr
ét ; x ù
= u êx (x , t ), t ù
=
u
êë ú
ú
û
ë
û
dt
dx
dy
dz
r =
r =
r = dt
u éêt ; x ùú v éêt ; x ùú w éêt ; x ùú
ë û
ë û
ë û
Streamline
A streamline is a line whose tangent always
represents the direction of velocity
Mathematical representation
r r
r
u (x , t )´ dr = 0
dx
dy
dz
=
=
u (x , y, z , t ) v (x , y , z , t ) w (x , y , z , t )
Example
Find the pathline and streamline of the following
flow field:
ìï u = t + x
ïí
ïïî v = t + y
Pathline
ìï dx
= t + x
ïï
dt
ïï
í
ïï dy
ïï
= t + y
ïî dt
ìï u = t + x ü
ïï
ïí
ý
ïîï v = t + y ïïþ
ìï u = C 1e t - 1
ïï
í
ïï v = C e t - 1
2
ïî
ìï x = a
ïí
ïï y = b
î
ü
ïï
(t = 0 )ý
ïï
þ
ìï du
- 1= u
ïï
dt
ïï
í
ïï dv
ïï
- 1= v
ïî dt
ìï x = C 1e t - t - 1
ïï
í
ïï y = C e t - t - 1
2
ïî
ìï x = (a + 1 )e t - t - 1
ïï
í
ïï y = (b + 1 )e t - t - 1
ïî
Streamline
dx
dy
=
t + x
t + y
x + t = C (y + t )
Streamline is identical to pathline if the velocity is invariable with
time
In general, streamlines will not intercross and will not end at a solid
wall, etc.
4. Terminology
Discharge and Mass flux
Q =
r
n
r
u
M =
òS
r r
u ×n dS
òS
r r
r u ×n dS
V = Q S
Streamtube, Stream filament, Total flow
Fluid system and Control volume
t+ t
t
z
y
x
Fluid system and Control volume
Steady flow and Unsteady flow
¶
= 0
¶t
St eady flow
¶
¹ 0
¶t
Unst eady flow
Steady flow and Unsteady flow
Uniform flow and Non-uniform flow
¶
¶
¶
u
+ v
+ w
= 0
¶x
¶y
¶z
Uniform flow
¶
¶
¶
u
+ v
+ w
¹ 0
¶x
¶y
¶z
Non-uniform flow
The streamlines of a uniform flow is necessarily
straight lines and parallel to each other
r
u ×Ñ = 0
r
u ^ Ñ
Gradually-varying flow and Rapidly-varying flow
u
¶
¶
¶
+ v
+ w
@0
¶x
¶y
¶z
Gradually-varying flow
•
Curvature of all streamlines are small
•
Streamlines are nearly parallel
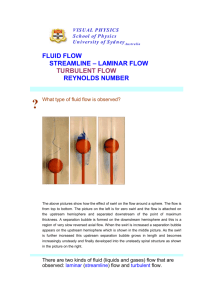
5. Motion and Deformation of Fluid Elements
t+ t
t
Motion of a fluid element can be decomposed into
Translation
Rotation
Deformation
The translation is described by
Velocity
r
u
r
u
The rotation is described by
Angular velocity
r
w
r
w
v
2
¶u
= ¶y
¶v
v1=
¶x
v
z
ö
1æ
¶
v
¶
u
÷
= çç ÷
÷
2 çè¶ x ¶ y ø
The angular velocity
r
1
r
w= Ñ´ u
2
The deformation is described by
Rat e of st rain
ée
ù
e
e
ê 11 12 13 ú
eij = êêe21 e22 e23 ú
ú
ê
ú
e
e
e
êë 31 32 33 ú
û
t+ t
ö÷
1æ
¶
u
¶
v
e12 = çç +
÷
2 çè ¶ y ¶ x ø÷
t
¶u
e11 =
¶x
Rate of strain
é
¶u
ê
ê
¶x
ê
ê æ
1 ¶v
[E ]= êê çç +
ê2 çè¶ x
ê
ê1 æ¶ w
+
ê çç
êêë2 è ¶ x
¶ u ö÷
÷
¶ y ø÷
ö
¶u÷
÷
¶ z ø÷
ö 1 æ¶ u ¶ w öù
1æ
¶
u
¶
v
÷
çç
÷
ú
çç
+
+
÷
÷
÷
2 çè ¶ y ¶ x ø 2 è ¶ z
¶ x ø÷úú
ö÷úú
¶v
1æ
¶
v
¶
w
çç +
÷
ú
ç
¶y
2 è¶ z
¶ y ø÷ú
ú
ö
ú
1æ
¶w
çç¶ w + ¶ v ÷
ú
÷
÷
ç
úúû
2 è¶ y
¶z ø
¶z
Helmholtz’s theorem of velocity decomposition
r
r
r
r
r
¶u
¶u
¶u
u = u0 +
Dx +
Dy +
Dz
¶x
¶y
¶z
r
r
r
= u 0 + (D r ×Ñ )u
r
r
r
r
= u 0 + w ´ D r + [E ]×D r
r
u
r
u0
r
Dr
Translation
r
r
r
r
r
u = u 0 + w ´ D r + [E ]×D r
Rotation
Deformation
6. Rotational and Potential Flows
r
Ñ´ u ¹ 0
Rot at ional flow
r
Ñ´ u = 0
Irrot at ional flow
Physical Interpretation
r
1
r
w= Ñ´ u
2
Example
ìï ur = 0
ïí
ïï u q = k r
î
ìï u = ky
ïí
ïï v = 0
î
is irrot at ional flow
is rot at ional flow
r
Ñ´ u = 0
f exists so that
r
u = Ñf
Velocity Potential
Irrotational flow
Potential flow
7. Continuity Equation
Conservation of Mass:
Mass in a closed system is invariant
rw +
1 ¶rw
Dz
2 ¶z
rv +
ru -
1 ¶ru
Dx
2 ¶x
ru +
z
y
rv -
1 ¶rv
Dy
2 ¶y
1 ¶rv
Dy
2 ¶y
x
rw -
1 ¶rw
Dz
2 ¶z
1 ¶ru
Dx
2 ¶x
Net outflow of mass through the surface of the control volume
æ
ö
æ
ö÷
1 ¶ru
ççr u + 1 ¶ r u D x ÷
ç
D
y
D
z
D
t
r
u
D
x
DyDzDt
÷
÷
ç
÷
÷
è
ø
è
ø
2 ¶x
2 ¶x
æ
ö÷
æ
ö÷
1 ¶rv
1 ¶rv
ç
ç
+ çr v +
Dy÷
D x D z D t - çr v Dy÷
DxDzDt
÷
÷
çè
ç
2 ¶y
2 ¶y
ø
è
ø
æ
ö
æ
ö÷
1 ¶rw
1 ¶rw
÷
ç
ç
+ çr w +
Dz÷
D x D y D t - çr w Dz÷
DxDyDt
÷
÷
è
ø
è
ø
2 ¶z
2 ¶z
æ¶ r u ¶ r v ¶ r w ÷
ö
r ù
ç
é
= ç
+
+
D x D y D z D t = ëÑ ×(r u )ûD x D y D z D t
÷
÷
çè ¶ x
¶y
¶z ø
Decrease of mass within the control volume
¶r
DxDyDzDt
¶t
Mass Conservation
r ù
¶r
é
D x D y D z D t = ëÑ ×(r u )ûD x D y D z D t
¶t
r
¶r
+ Ñ ×(r u ) = 0
¶t
For incompressible fluid
r
Ñ ×u = 0
r
Ñ ×u = e11 + e22 + e33 = ev
Bulk expansion
Continuity Equation for Steady Total Flows
Se
S
o
Net out flow =
ò
r r
n ×u dS +
So
Qo = Qe
ò
Se
r r
n ×u dS = Qo - Qe = 0
(AoV o = AV
e e)
So
n u dS n u dS 0
Se
Qo Qe Q
Vo Ao Ve Ae
Continuity Equation for Potential Flows
r
Ñ ×u = Ñ ×(Ñ f ) = Ñ 2f = 0
¶ 2f
¶ 2f
¶ 2f
+
+
= 0
2
2
2
¶x
¶y
¶z
 0
0