投影片 - 國立中山大學
advertisement

Image Retrieval Based on
Fractal Signature
蔣依吾
國立中山大學 資訊工程學系
E-mail: chiang@cse.nsysu.edu.tw
Web: http://image.cse.nsysu.edu.tw
• 傳統資料庫
資料庫
– 資料庫中主要資料為文字
– 資訊描述容易
– 搜尋正確性高
• 影像資料庫
– 昔日以文字描述
– 資訊不易描述
– 搜尋正確性低
Block Diagram of
Image retrieval System
Ideal Image Retrieval
• 相似之影像有相似之索引檔
(a) 高相關度影像資訊有高相關索引檔
(b) 索引檔相關度高,其影像資訊相關度高
• 不相似之影像有不相似之索引檔
(c) 索引檔相關度低,其影像資訊相關度低
(d) 影像資訊相關度低,其索引檔相關度低
Feature used for querying
•
•
Text, color, shape, texture , spatial relations
Image Retrieval Systems:
1. IBM QBIC: color , texture, shape
2. Berkeley BlobWorld: color, texture,
location and shape of region (blobs)
3. Columbia VisualSEEK: text, color , texture,
shape, spatial relations
使用顏色
• Babu[1995]
• 選出主要顏色,以主要顏色取代原本顏
色
• 計算每種顏色的頻率f1,f2,…,fn,成為特
徵,I=(f1,f2,…,fn)
• 計算相似度Dq,i=[(Iq-Id)2]1/2
使用顏色
使用形狀
• S. Berretti[1999]
• 將形狀沿反曲點切開
• 記錄毎個曲線曲率及軸線角度
使用形狀
使用內容物
• Jim [2000]
• 以影像組成元素為搜尋特徵
• 將組成物分成背景,紋理,物體
Category
Background
Texture
Object
Number of
colors
Normal
Few or
normal
Normal or
many
Edge
information
Less long
lines
Many short
lines or few
long lines
Normal
Color
similarity
High
Low
Low
使用內容物
影像尺寸
• Albuz [2001]
•使用小波轉換中的高頻濾波器及低頻濾波器
影像尺寸
影像位移
• Wang [2000]
• 索引圖檔及資料庫圖檔之關係分為三種:
關係一
關係二
關係三
影像旋轉
• Gaurav [2002]
•先將影像做影像分割,把要紀錄之重要
物體切割出來
•將物體正規化後之形狀、角度、方向紀
錄下來
影像旋轉
碎形編碼
•何謂碎形
碎形編碼
• 碎形(fractal)一詞則是Mandelbrot 引用由Hausdorff
在1919 年所提出之碎形維(fractal dimension)觀念
所命名而來。
• 1982 年,MIT 的Pentland 教授把碎形維或次元或分
維(fractal dimension)作為影像理解(image
understanding)的特徵量(feature)而應用到電腦視
覺領域中。
• Mandelbrot 開啟一個名為碎形幾何(fractal geometry)
的研究浪潮[Mandelbrot 1982]。它在數位影像處理的
應用上包括影像切割、影像分析、影像合成、以及
影像壓縮等。
• Barnsley 是第一個使用碎形技術作影像壓縮的人。截
至目前為止,他的演算法一直沒有公諸於世。目前
所看到影像壓縮法主要是由他的一為博士班學生
Jacquin 所發表出來[Jacquin 1989],以及後來許多改
良版[Fisher 1991][ Jacquin 1993]。
碎形起源
• 1967 年 Benoit Mandelbrot :「英國的海岸線有多長?」
• 靈感來自於英國數學家 Lewis Fry Richardson
• 書上在估計同一個國家的海岸線長度時,有百分之二
十
的誤差。
• 誤差是因為使用不同長度的量尺所導致的
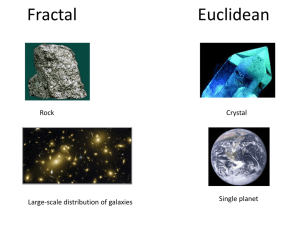
什麼是碎形?
Fractals Everywhere
M. Barnsley, Academic Press, 1989
碎形特性
1. 自我相似
2. 碎形維度
3. 疊代
史賓斯基三角形
產生 Sierpinski Gasket 方法如下:
第零步驟:畫出實心的正三角形
第一步驟:將三角形每一邊的中點連線,會分割成四
個小正三角形,把中央正三角形拿掉,會
剩下其餘的三個正三角形
第二步驟:將每一個實心小角形 都重複第一步驟
第三步驟:重複第二步驟
接下來的步驟,即重複地疊代下去………………
寇赫曲線:雪花
產生 Koch Curve 方法如下:
第零步驟:畫出一條線段(假設線段長度 L=1)
第一步驟:將這條線段分成三等份,然後以中間的
線段為底邊,製作一個三邊等長的三角
形,然後拿掉這個正三角形的底邊(此
時,L=(4/3)1)
第二步驟:將曲線中的每一個線段都重複第一步驟
(此時,L=(4/3)2)
第三步驟:重複第二步驟(此時,L=(4/3)3)
接下來的步驟,
即重複地疊代下去(此時,L=(4/3)n)………………
碎形
碎形編碼
• 自我相似性
• 影像分割
– Range Block:不重疊
大小8x8
– Domain Block:重疊
大小16x16(D>B)
Partitioned Iterative Function Systems; PIFS
碎形在影像搜尋的應用
• Wang [2000]
•使用碎形函數集之係數(a,b,c,d,e,f,g,z)當作
搜尋鍵值
•定義域不同,比對效果不佳
Fractal Orthogonal Basis
• Vines, Nonlinear address maps in a one-dimensional fractal model,
IEEE Trans. Signal Processing,1993.
• Training Orthonormal basis vectors.
• Gram-Schmidt method
• Compression: each image range block (R) decomposed
into a linear combination,
L
2
R wi qi
i 1
• Using linear combination coefficient
feature vector。
(w1, w2 ,...,wL2 )
as a
Proof of Theorem
• theorem 1:
Let f , g is distance space(K,d)functions,
Range block length k,f= si xi , g= ti xi , i,j 1.. k 2
i 1~ k
i 1~ k
xi‧xj=0 and | xi |=1 , S={s1s2.. sk}2
f has fixed point a,S: query image a’s index,
T={t1t2… tk 2 }, g has fixed point b , T: database image
b’s index,
if a , b is close, then S , T is close;
if S , T is close, then a , b is close。
2
2
Proof of Theorem 1
(a)
Proof : a , b is close , S , T is close
a , b is close , then ||a-b||
k2
|| a b |||| ( si ti ) xi ||
i 1
k2
( ( si ti ) x )
2
i 1
2
i
1
2
i, j {1...k 2 }, | xi | 1
k2
|| a b || ( ( si ti ) )
2
1
2
i 1
|| S T ||
thus a , b is close , S , T is close
Proof of Theorem 1
(b)
Proof: S , T is close , a , b is close
k2
S , T is close , then || S T || ( (si ti ) 2 )
i 1
1
k2
|| S T || ( ( si ti ) 1 )
2
2
2
i 1
i, j {1...k 2 }, | xi | 1
k2
|| S T || ( ( si ti ) x )
2
i 1
2
i
1
2
|| a b ||
thus S , T is close , a , b is close
1
2
Proof of Theorem
• theorem 2:
Let f , g is distance space(K,d)functions,
si xi
ti xi , i,j 1.. k 2
Range block length k,f= i
,
g=
1~ k
i 1~ k
xi‧xj=0 and | xi |=1 , S={s1s2.. sk}2
f has fixed point a,S: query image a’s index,
T={t1t2…tk 2 }, g has fixed point b , T: database image
b’s index,
if a , b is not close, then S , T is not close;
if S , T is not close, then a , b is not close。
2
2
Proof of Theorem 2
(c) Proof : a , b is not close , S , T is not close
by theorem 1, a , b is close S , T is close
thus a , b is not close , S , T is not close
(d) Proof: S , T is not close , a , b is not close
by theorem 1, a , b is close S , T is close
thus S , T is not close , a , b is not close
Advantages based on
Fractal Orthogonal Basis
1. Compressed data can be used directly as
indices for query.
2. Image index satisfy the four properties.
3. Similarity measurement is easy.
Orthonormal Basis Vectors
(a)
(b)
(c)
Figure 3. The 64 fractal orthonormal basis vectors of (a) R, (b) G, and (c) B color
components, respectively, derived from an ensemble of 100 butterfly database
images. The size of each vector is enlarged by two for ease of observation..
Fourier transform vs
Fractal Orthonormal basis
Original image
Compressed image
Experimental Results
Image database
• The source of images:
http://www.thais.it/entomologia/
http://turing.csie.ntu.edu.tw/ncnudlm/index.html
http://www.ogphoto.com/index.html
http://yuri.owes.tnc.edu.tw/gallery/butterfly
http://www.mesc.usgs.gov/resources/education/butterfly/
http://mamba.bio.uci.edu/~pjbryant/biodiv/bflyplnt.htm
• Image size:320x240
• Total of images:1013
• Range block size:8x8
• Domain block size:8x8
• Domain block set: 64 domain blocks in each color plane
Figure 4. An image retrieval example. The features from R, G, B color
components and brightness level of the query image are all selected. The
rectangular area in the upper right-hand corner provides an enlarged viewing
window for the image retrieved.
Figure 6. Retrieval results based on a sub-region of a query image with scaling
factors 0.8 through 1.2 and rotation angles every 30 degrees.
Future work
1. With Multiple Instance Learning, finding “ideal”
feature vector, as query feature.
2. Considering spatial relations of sub-regions.
3. Increasing performance.
Multiple Instance Learning
B1 , B2 ,...,Bn
• To Find a feature vector that is
close to a lot from different positive
bags and far from all the instances
from negative bags.
• Instance: each of these feature
vectors.
• Bag: the collection of instances for
the same example image.
• Positive: B1 , B2 ,...,Bn
At least one of the instances in the bag should be a close
match to the concept.
B
,
B
,...,
B
• Negative: 1 2
n
None of the instances in the bag corresponds to the concept.
Diverse Density Algorithm
• Looking for a point in the weighted k-dimensional space
near with there is a high concentration of positive instances
from different bags.
• For any point t in the feature space, the probability of it
being our target point, given all the positive and negative
bags, is Pr (t | B1 ,...,Bn ,...,B1 ,...,Bm )
P
(
t
|
B
)
P
(
t
|
B
• maximizing Diverse Density : arg max
r i r i)
t
i
where
i
Pr (t | Bi ) 1 (1 Pr ( Bij t )); Pr (t | Bi ) (1 Pr ( Bij t ))
j
j
Pr (Bij t ) exp( ||Bij t ||2 ); || Bij t || 2 ( Bijk t k ) 2
k
• The DD algorithm makes use of a gradient ascent method
with multiple starting points. It starts from every instance
from every positive bag and performs gradient ascent from
each one to find the maximum.
DD-algorithm Example