ppt
advertisement

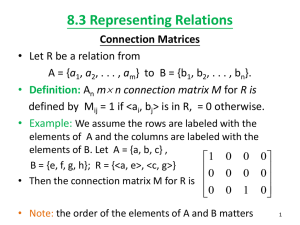
THREE-WAY COMPONENT MODELS 880305- pages 66-76 By: Maryam Khoshkam 1 Tucker component models Ledyard Tucker was one of the pioneers in multi-way analysis. He proposed a series of models nowadays called N-mode PCA or Tucker models [Tucker 1964- 1966] 2 TUCKER3 MODELS : nonzero off-diagonal elements in its core. 3 In Kronecker product notation the Tucker3 model 4 PROPERTIES OF THE TUCKER3 MODEL Tucker3 model has rotational freedom. TA : arbitrary nonsingular matrix Such a transformation of the loading matrix A can be defined similarly for B and C, using TB and TC, respectively 5 Tucker3 model has rotational freedom, But: it is not possible to rotate Tucker3 core-array to a superdiagonal form (and to obtain a PARAFAC model.! The Tucker3 model : not give unique component matrices it has rotational freedom. 6 rotational freedom Orthogonal component matrices (at no cost in fit by defining proper matrices TA, TB and TC) convenient : to make the component matrices orthogonal easy interpretation of the elements of the corearray and of the loadings by the loading plots 7 SS of elements of core-array amount of variation explained by combination of factors in different modes. variation in X: unexplained and explained by model Using a proper rotation all the variance of explained part can be gathered in core. 8 The rotational freedom of Tucker3 models can also be used to rotate the core-array to a simple structure as is also common in two-way analysis (will be explained). 9 Imposing the restrictions A’A = B’B = C’C = I : not sufficient for obtaining a unique solution To obtain uniqe estimates of parameters, 1. loading matrices should be orthogonal, 2. A should also contain eigenvectors of X(CC’ ⊗ BB’)X’ corresp. to decreasing eigenvalues of that same matrix; similar restrictions should be put on B and C [De Lathauwer 1997, Kroonenberg et al. 1989]. 10 Unique Tucker Simulated data: Two components, PARAFAC model 1 0.5 0 0 5 10 15 20 1 0.5 0 5 10 15 1 0.5 0 2 11 4 6 8 0.5 0.5 0.5 -15 1 Unique Tucker3 component model 1 1 1.5 1 1.5 5 0.8 4 0 1.5 -5 2 2 2 3 0.6 2.5 2.5 -10 3 P=Q=R=3 x 10 6 3.5 2.5 3 1 2 -153.5 3 2 0.4 0.2 1 2 3 3 0 3.5 1 1 2 3 0 1 0.5 0 -0.5 0 2 4 6 8 10 12 14 16 18 20 1 0.5 0 -0.5 0 2 4 6 8 10 12 14 16 1 0 12 -1 1 2 3 4 5 6 7 8 Only two significant elements in core 0.5 0.5 1 0.5 1 1.5 1 0 0 1.5 1.5 -0.2 2 -0.4 2 2.5 2.5 -0.62.5 3 -10 3 2 -5 -15 x 10 0 -5 -10 3.5 1 2 -0.8 3 3.5 -15 3 1 2 3 8 10 12 -1 3.5 1 2 3 0.5 0 -0.5 -1 0 2 4 6 14 16 18 20 1 0.5 0 -0.5 0 2 4 6 8 10 12 14 16 1 0 13 -1 1 2 3 4 5 6 7 8 -15 0.5 0.5 0.5 0.5 1 1 1 1 1.5 1.5 1.5 1.5 2 2 2 2 2.5 0.5 1.5 2 2.5 2.5 0.5 1 1.5 2 2.5 2.5 0.5 1 0.5 0 0 -1 -0.5 0 5 10 15 20 0.5 0.5 0 0 -0.5 -0.5 0 2 4 6 8 10 12 14 16 1 1 0 0 -1 14 1 -1 1 2 3 4 5 6 7 8 0 0 1 1 1.5 2 2.5 2 4 6 8 2 4 2 1 10 6 3 2.5 0.5 12 8 4 1.5 14 10 5 2.5 16 12 6 2 18 14 7 20 16 8 In tucker 3 all three modes are reduced models where only two of the three modes are reduced, :Tucker2 models. a Tucker3 model is made for X (I × J × K) C is chosen to be the identity matrix I, of size K × K. no reduction sought in the third mode (basis is not changed. ↘Tucker2 model : 15 Tucker2 has rotational freedom: G : postmultiplied by U⊗V (B⊗A) : premultiplied by (U⊗V)−1 =>(B(U’)−1 ⊗A(V’)−1) without changing the fit. component matrices A and B can be made orthogonal 16 without loss of fit. (using othog U and V) Tucker1 models : reduce only one of the modes. + X (and accordingly G) are matricized : 17 different models [Kiers 1991, Smilde 1997]. Threeway component models for X (I × J × K), A : the (I × P) component matrix (of first (reduced) mode, X(I×JK) : matricized X; A,B,C : component matrices; G : different matricized core-arrays ; I :superdiagonal array (ones on superdiagonal. (compon matrices, core-arrays and residual error arrays : differ for each model => 18 PARAFAC model is a special case of Tucker3 model.