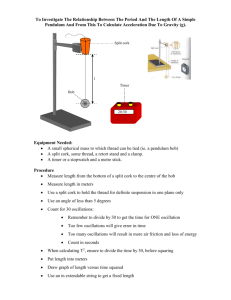
15.2 Simple Harmonic Oscillations

Chapter 15
Oscillations
(credit: metaist.com)
Key contents
Oscillations
Simple Harmonic Oscillations
Simple Harmonic Motions
Pendulums
Damped Oscillations
Forced Oscillations and Resonance
15.1 Oscillations variations (What is varying?) repeated periodic periodic variation oscillation
Frequency of oscillation is the number of oscillations that are completed in each second.
The symbol for frequency is usually f (or n
), and its SI unit is Hertz (abbreviated as Hz ).
It follows that
T
=
1 f with T being the period .
15.2 Simple Harmonic Oscillations
Any oscillation that can be expressed with a sinusoidal function is a harmonic oscillation.
When its amplitude is constant, it is a simple harmonic oscillation.
That is, x ( t )
= x
0 cos( w t
+ j
)
•
•
• x
0 is the amplitude
• t is the time w is the angular frequency,
• ( w t
+f ) is the phase w =
2
T p
=
2 f is the phase constant or phase angle p f
15.2 Simple Harmonic Oscillations
Some remarks for simple harmonic oscillations:
# good approximation to many things
# easy to manage analytically
# most importantly, the Fourier transform
# x(t) can be any physical quantity
# a projection of uniform circular motion x ( t )
= x
0 cos( w t
+ j
) dx dt d
2 x dt
2
= w x
0
= w
2 x sin(
0 w t
+ j
) cos( d
2 x dt
2
+ w t
+ j
)
= w
2 x ( t ) w
2 x ( t )
=
0
15.3 Simple Harmonic Motion
If the oscillating quantity is the position of an object, the simple harmonic oscillation is a simple harmonic motion (SHM).
From Newton’s 2 nd law we have, for SHM,
F
= ma
= m d
2
2 x
= m w
2 x
= kx dt
SHM is the motion executed by a system subject to a force that is proportional to the displacement of the system but opposite in sign.
15.3 Simple Harmonic Motion
The block-spring system shown on the right forms a linear SHM oscillator, which follows
Hooke’s law: F
= kx
= m w
2 x
The spring constant of the spring, k, is related to the angular frequency, w
, of the oscillator: w = k m
®
T
=
2 p m k
15.3 Simple Harmonic Motion
F
= m d
2 dt
2 x d
2 dt d
2 dt
2
2 x x
+
+ k m w
2 x x
= -
=
=
0
0 kx x ( t )
= x
0 cos( w t
+ j
)
Example :
Example :
Example :
Example :
Example :
Example :
15.3 Simple Harmonic Motion
Energy in SHM
U ( t )
= ò
0 x
(
-
F ) d x
¢ =
1
2 kx
2
=
1
2 kx
0
2 cos
2
( w t
+ j )
K ( t )
=
1
2 mv
2
=
1
2 m w
2 x
2
0 sin
2
( w t
+ j ) =
1
2 kx
0
2 sin
2
( w t
+ j )
The total mechanical energy of the system:
E
=
U
+
K
=
1
2 kx
0
2
Example, energy in SHM:
Many tall building have mass dampers, which are anti-sway devices to prevent them from oscillating in a wind. The device might be a block oscillating at the end of a spring and on a lubricated track.
If the building sways, say eastward, the block also moves eastward but delayed enough so that when it finally moves, the building is then moving back westward.
Thus, the motion of the oscillator is out of step with the motion of the building.
Suppose that the block has mass m =
2.72 x 10 5 kg and is designed to oscillate at frequency f = 10.0 Hz and with amplitude x m
= 20.0 cm.
(a) What is the total mechanical energy
E of the spring-block system?
Example, energy, continued:
15.3 Simple Harmonic Motion
An angular SHM: The figure shows a torsion pendulum, which involves the twisting of a suspension wire as the disk oscillates in a horizontal plane.
The torque associated with an angular displacement of q is given by: t = kq =
I d
2 q
2 dt k is the torsion constant, which depends on the length, diameter, and material of the suspension wire, and I is the moment of inertia (rotational inertia) of the disk.
The period, T, is then w = k
I
T
=
2 p k
I
Example, angular SHM:
Figure a shows a thin rod whose length L is 12.4 cm and whose mass m is 135 g, suspended at its midpoint from a long wire. Its period T a of angular SHM is measured to be 2.53 s. An irregularly shaped object, which we call object X, is then hung from the same wire, as in Fig. b, and its period T b is found to be 4.76 s. What is the rotational inertia of object X about its suspension axis?
Answer: The rotational inertia of either the rod or object X is related to the measured period. The rotational inertia of a thin rod about a perpendicular axis through its midpoint is given as 1/12 mL 2 .Thus, we have, for the rod in Fig. a,
Now let us write the periods, once for the rod and once for object X:
The constant k
, which is a property of the wire, is the same for both figures; only the periods and the rotational inertias differ.
Let us square each of these equations, divide the second by the first, and solve the resulting equation for I b
. The result is
15.4 Pendulums
In a simple pendulum, a particle of mass m is suspended from one end of an unstretchable massless string of length L that is fixed at the other end.
The restoring torque acting on the mass when its angular displacement is q
, is: t = -
L ( F g sin q
)
I
= mL
2
=
I a =
I d sin
2 q
2 dt a is the angular acceleration of the mass. q » q d
2 q
= mgL q dt
2 mL
2
T
=
2 p
L g
This is true for small angular displacements, q
<<1
.
15.4 Pendulums
A physical pendulum can have a complicated distribution of mass. If the center of mass, C, is at a distance of h from the pivot point O, then for small angular amplitudes, the motion is simple harmonic. t =
I d
2 q dt
2
= mg h sin q » mg h q
T
=
2 p I mgh
(I is the rotational inertia of the pendulum about O)
# for h
L, we have I =mL 2 and T
=
2 p
L g
, just like a simple pendulum
15.4 Pendulums
In the small-angle approximation we can assume that q
<< 1 and use the approximation sin what angle q q
. Let us investigate up to q is the approximation reasonably accurate? q
(degrees) q
(radians) sin q
5
10
0.087
0.174
0.087
0.174
15
20
0.262
0.349
0.259 (1% off)
0.342 (2% off)
Conclusion: If we keep q
< 10 ° we make less than 1 % error.
Example, pendulum:
In Fig. a, a meter stick swings about a pivot point at one end, at distance h from the stick’s center of mass.
(a)What is the period of oscillation T?
KEY IDEA: The stick is not a simple pendulum because its mass is not concentrated in a bob at the end opposite the pivot point—so the stick is a physical pendulum.
Calculations: The period for a physical pendulum depends on the rotational inertia, I, of the stick about the pivot point. We can treat the stick as a uniform rod of length L and mass m. Then I =1/3 mL 2 , where the distance h is L.
Therefore,
Note the result is independent of the pendulum’s mass m.
Example, pendulum, continued:
(b) What is the distance L
0 the stick?
between the pivot point O of the stick and the center of oscillation of
Calculations: We want the length L
0 of the simple pendulum (drawn in Fig. period as the physical pendulum (the stick) of Fig. a.
b) that has the same
15.5 Damped Oscillations
In a damped oscillation, the motion of the oscillator is reduced by an external force.
Example: A block of mass m oscillates vertically on a spring with spring constant k.
From the block a rod extends to a vane which is submerged in a liquid.
The liquid provides the external damping force, F d
.
15.5 Damped Oscillations
Often the damping force, F d
, is proportional to the 1 st power of the velocity v . That is,
F d
= g v m d
2 dt
2 x
+ g dx
+ kx
=
0 dt
The solution is:
g t x ( t )
= x
0 e 2 m cos( w
' t
+ j
) w
'
= w
0
2 ç
æ
è g
2 m
ø
÷
ö 2 w
0
= k m
15.5 Damped Oscillations
g t x ( t )
= x
0 e 2 m cos( w
' t
+ j
)
The above figure shows the displacement function x(t) for the damped oscillator described before.
The amplitude decreases as x
0 exp (g
t / 2m) with time.
# The above is for g
< 2 m w
0
(underdapmed).
# For g
> 2 m w
0 and g
= 2 m w
0
(overdapmed)
(critical damping), the oscillation goes like the right figure.
Example :
For the damped oscillator in the figure, m 250 g, k = 85 N/m, and b =70 g/s.
(a) What is the period of the motion?
Example :
(b) How long does it take for the amplitude of the damped oscillations to drop to half its initial value?
Example :
(c) How long does it take for the mechanical energy to drop to one-half its initial value?
15.6 Forced Oscillations and Resonance
When the oscillator is subjected to an external force that is periodic, the oscillator will exhibit forced/driven oscillations.
There are two frequencies involved in a forced oscillator:
I. w
0
, the natural angular frequency of the oscillator, without the presence of any external force, and
II. w e
, the angular frequency of the applied external force.
The equation of motion is like the following: m d dt
2
2 x
+ g dx
+ kx
=
F
0 dt cos( w e t )
15.6 Forced Oscillations and Resonance m d dt
2
2 x
+ g dx
+ kx
=
F
0 dt cos( w e t )
The steady state solution is x ( t )
=
A cos( w e t
+ d
)
A
=
F
0
/ m
( w
0
2 w e
2
)
2 + ç
æ
è g m w e
÷
ö
ø
2 tan d = g m w
0
2 w
e w e
2 w
0
= k m
Resonance occurs at w e
~ w max
< w
0
, for g <
2 m w
0
Homework:
Problems 14, 24, 33, 48, 63