Univariate and Multivariate Integrals
advertisement

Proper Univariate and
Multivariate Integrals
b
f ( x) dx
a
Rajandra Chadra Bhowmik
Lecturer
Dept. of Mathematics
Pabna Science and Technology University
1
Let’s start with some classical problems
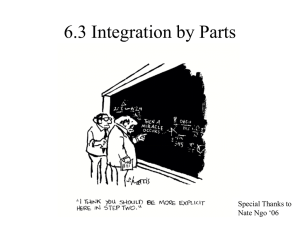
Area of the circle x.2+y.2=25
5
• What is the area of a circle?
y=sqrt(25-x2)
4
3
R1
2
How is it = pi*(radius)2
y-axis
1
0
x=5
x=0
-1
y=0
???
-2
-3
-4
-5
-6
-4
-2
0
x-axis
2
4
6
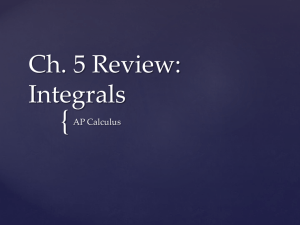
• What is the volume of a sphere?
How is it = 4*pi*radius3/3
???
x = cos(t), y = sin(t), z = t in 0 <= t <= pi
3.5
3
z-axis
2.5
•
2
1.5
1
0.5
0
-1
1
-0.5
0.5
0
0.5
1
0
What is the mass of a wire?
if density is given
???
y-axis
x-axis
2
Lecture contents
1.
2.
3.
4.
5.
6.
7.
8.
Pre-history and Archimedes
Invention of Newton and Leibnitz
Definite integrals and Riemann
Geometric Interpretation and Applications
of Definite Integrals
Double Integrals and Triple Integrals
Applications of Double Integrals and Triple
Integrals
Line Integrals
Applications of Line Integrals
3
Pre-history and Archimedes
•
Integration can be traced as far back as
ancient Egypt, circa 1800 BC, with the
Moscow
Mathematical
Papyrus
demonstrating knowledge of a formula for
the volume of a pyramidal frustum.
•
The first documented systematic technique
capable of determining integrals is the
method of exhaustion of Eudoxus (circa 370
BC), which sought to find areas and
volumes by breaking them up into an infinite
number of shapes for which the area or
volume was known.
•
This method was further developed and
employed by Archimedes (287 BC - 212 BC)
and used to calculate areas for parabolas
and an approximation to the area of a circle.
Archimedes devised a heuristic
method based on statistics to do
private calculations that would be
classified
today
as
integral
calculus, but then presented
rigorous geometric proofs for his
results.
To
what
extent
Archimedes’ version of integral
calculus was correct is debatable.
4
Invention of Newton and Leibnitz
•
The major advance in integration came in the 17th
century with the independent discovery of the
fundamental theorem of calculus by
Newton (1642-1727) and Leibnitz (16461716).
•
The theorem demonstrates a connection between
integration and differentiation. This connection,
combined with the comparative ease of
differentiation, can be exploited to calculate
integrals.
•
In particular, the fundamental theorem of calculus
allows one to solve a much broader class of
problems. Equal in importance is the comprehensive
mathematical framework that both Newton and
Leibnitz developed. Given the name infinitesimal
calculus, it allowed for precise analysis of functions
within continuous domains. This framework
eventually became modern calculus, whose notation
for integrals is drawn directly from the work of
Leibnitz.
5
Drawbacks of Newton and Leibnitz
• While Newton and Leibnitz provided a
systematic approach to integration, their
work lacked a degree of rigor.
• Bishop
Berkeley
memorably
infinitesimals as "the ghosts of
quantities".
attacked
departed
• Calculus acquired a firmer footing with the
development of limits and was given a
suitable foundation by Cauchy in the first
half of the 19th century.
6
Definition of Riemann integral
Let [a, b] be a compact
(closed and bounded)
interval in R.
Let p={a=x0,x1,x2,..,xn=b},
with
xk-1<=xk
for
k=1,2,…,n, be a partition
of [a, b].
Let f be a bounded real
function defined on [a, b]
• Integration was first rigorously
formalized, using limits, by
German
Mathematician
Riemann (1826-1866)
7
Graphical Representations
f
a=x0
∆x1
ξ1
x1 ξ2 x2
∆x2
Xk-1 ξk xk
∆xk
Xn-1 ξn
Xn=b
∆xn
8
Definition of Riemann integral
• Write ∆xk=xk-xk-1 for k = 1,2,…,n.
•
Set δ = max {∆xk : k = 1,2,…,n}
•
For each k = 1,2,…,n, Choose point
k [ xk 1, xk ]
• Then the Riemann integral of f with respect to x is defined by
b
n
f ( k ) x k
a f ( x ) dx lim
0
k 1
b
Or eqivalently by
n
f ( k ) x k
a f ( x ) dx nlim
k 1
• Provided the limits exist.
9
Graphical Representations
f(ξn)∆xn
f(ξk)∆xk
f(ξ2)∆x2
f(ξk)
f(ξn)
f
f(ξ1)∆x1
f(ξ1)
x0=a
ξ1
∆x1
f(ξ2)
x1 ξ2 x2
∆x2
Xk-1 ξk xk
∆xk
Xn-1 ξn
Xn=b
∆xn
10
Riemann Integral
(Rigorous definition )
Let [a, b] be a compact (closed and
bounded) interval in R.
Let p={a=x0,x1,x2,..,xn=b}, with xk-1<=xk
for k=1,2,…,n, be a partition of [a, b].
Write ∆xk=xk-xk-1 for k = 1,2,…,n.
Let f be a bounded real function
defined on [a, b]
11
Corresponding to each partition P, and
k=1,2,…n, put
Mk sup {f ( x ) : xk 1 x xk }
mk inf {f ( x ) : xk 1 x xk }
And then
n
U (P , f )
Mk xk
k 1
L(P, f )
n
mk xk
k 1
12
Lower sum L(P, f)
mn ∆xn
mk ∆xk
m2 ∆x2
f
m3 ∆x3
m1 ∆x1
x0=a
∆x1
x1 x 2
x3
∆x2 ∆x3
Xk-1
∆xk
xk
Xn-1 Xn=b
∆xn
13
Upper sum U(P, f)
Mn ∆xn
Mk ∆xk
M2 ∆x2
M3 ∆x3
M1 ∆x1
x0=a
∆x1
f
x1 x 2
x3
∆x2 ∆x3
Xk-1
∆xk
xk
Xn-1 Xn=b
∆xn
14
Let P be the set of all partitions of [a, b].
Then, finally taking infimum and supremum
over all partitions of [a, b] to define the upper
Riemann integral and lower Riemann integral
respectively as
f ( x) dx inf
pP
U ( P, f )
f ( x) dx sup
pP
L ( P, f )
15
If the lower Riemann integral and the upper
Riemann integral are equal, then we say that
the function is Riemann integrable on [a, b] and
write
f R
In this case we write the integral as
b
a f ( x) dx
instead
of
f ( x) dx or
f ( x) dx
16
upper limit of integration
Integration
Symbol
f x dx
b
a
integrand
lower limit of integration
variable of integration
(dummy variable)
It is called a dummy variable
because the answer does not
17
depend on the variable chosen.
The exact value from integration
b
f ( x) dx
a
x0=a
∆x1
x1 x 2
x3
∆x2 ∆x3
Xk-1
∆xk
xk
Xn-1 Xn=b
∆xn
18
Some results
For every P,
m(b a) L( P, f ) U ( P, f ) M (b a)
f ( x) dx f ( x) dx
For any refinement P*(a super set of P) of P,
L( P, f ) L( P*, f ) U ( P*, f ) U ( P, f )
19
b
f ( x) dx <= M (b-a)
a
M (b-a)
f
x0=a
∆x1
x1 x 2
x3
∆x2 ∆x3
Xk-1
∆xk
xk
Xn-1 Xn=b
∆xn
20
b
f ( x ) dx <= U (P1, f) <= M (b-a)
a
M1 ∆x1
M2 ∆x2
f
X1
x0=a
∆x1
X2=b
∆x2
21
b
f ( x ) dx <=U (P2, f)<= U (P1, f) <= M (b-a)
a
M3 ∆x3
M1 ∆x1
M2 ∆x2
f
X1
x0=a
∆x1
X2
∆x2
X2=b
∆x3
22
b
m (b-a) <= f ( x ) dx
a
f
m (b-a)
x0=a
∆x1
x1 x 2
x3
∆x2 ∆x3
Xk-1
∆xk
xk
Xn-1 Xn=b
∆xn
23
b
m (b-a)<= L (P1, f)<= f ( x ) dx
a
m2 ∆x2
f
m1 ∆x1
X1
x0=a
∆x1
X2=b
∆x2
24
b
m (b-a) <= L (P1, f) <= L (P2, f) <= f ( x) dx
a
m3 ∆x3
f
m2 ∆x2
m1 ∆x1
X1
x0=a
∆x1
X2
∆x2
X2=b
∆x3
25
Necessary and sufficient conditions
A function f is Riemann integrable if
for every 0, there exist a partition P
such that
U (P, f ) - L(P, f )
f is continuous on [a, b] implies f is Riemann integrable on [a, b].
f is monotonic on [a, b] implies f is Riemann integrable on [a, b].
f is bounded on [a, b] and f has only finitely many points of discontinuity
on [a, b] implies f is Riemann integrable on [a, b].
A bounded function f on a compact interval is integrable iff its set
of discontinuities has measure zero(0).
Proof of the Theorem is out of scope here (a matter of Lebesgue Integration in Measure
Theory). For instant, we only say that all countable sets, including finite sets, and the
Cantor set have measure 0, so that functions that are discontinuous only on these sets
are integrable.
26
Dirichlet function and Thomae function
1 when x Q
d ( x)
0 when x Q
1
when x 0
p
1
t ( x)
when x , q 0, p Z, gcd( p, q) 1
q
q
0
when x Q
So, Dirichlet function is not integrable but
Thomae function is.
Both functions
are bounded.
First one is
discontinuous
everywhere in R.
i.e. the set of
discontinuities
has a nonzero
measure. On the
other hand,
second one is
discontinuous
only at the
rationals. i.e. set
of discontinuities
has measure 0.
27
Properties of Riemann integral
Let f R on [a, b]. Then
b
i ) f 0 f dx 0
a
b
a
a
b
Let f R , g R on [a, b] and R.Then
ii ) f dx f dx
b
c
b
a
a
c
iii ) f dx f dx f dx, for some c (a, b )
b
b
b
a
a
a
i ) f g R and (f g ) dx f dx g dx
b
b
a
a
ii ) f R and f dx f dx
b
b
a
a
iii ) f ( x ) g ( x ) in [a, b] f dx g dx
Let f R on [a, b].Then
i ) f ( x ) M on [a, b]
b
b
a
a
b
iv ) fg R .
a f dx M (b a)
ii ) f R and f dx f dx
28
Fundamental Theorem of Calculus (Part 1)
Let f be a real function Riemann integrable
on [a, b]. And if there be a differentiable
function F on [a, b] such that F f , then
/
b
a f ( x ) dx F (b ) F (a ).
29
Proof:
• Let f be a real Riemann integrable function
on [a, b]. Then for any arbitrary ε >0, we
must
have
a
partition
P={a=x0,
x1,x2,…,xn=b} with U(P, f)-L(P, f) < ε
• Now for each k=1,2,….,n, applying Mean
Value Theorem in the interval [xk-1, xk], we
must have tk in [xk-1, xk] such that
F(xk) - F(xk-1) = ∆xk F/(tk) = f(tk) ∆xk
30
n
Thus,
f (t
k 1
k
) F ( b ) F (a )
But , as f is Riemann integrable on [a, b],
b
so, for sufficient large n,
f ( x ) dx
a
n
will be closely approxiamted by
f (t
k 1
k
).
Thus for the given 0, we must have
b
F (b ) F (a ) f ( x ) dx .
a
b
Hence,
f ( x ) dx
F ( b ) F (a )
a
31
Fundamental Theorem of Calculus (Part 2)
Let f be a real fuction Riemann integrable on [a, b].
x
For a x b, put F ( x ) f (t ) dt .
a
Then F is continuous on [a, b ]; furthermore,
if f is continuous at a po int c of [a, b ],
then F is differentiable at c, and
F / (c ) f (c )
32
Proof:
Since f R on [a, b], so f is bounded and thus,
say f ( x ) M for all x [a, b].
Now for any x, y [a, b] with x y ,
y
x
a
a
F ( y ) F ( x ) f ( x ) dx f ( x ) dx
y
f ( x ) dx M ( y x )......(*)
x
33
Continue:
Let 0 be given satisfying F ( y ) F ( x )
Then,using (*), for / M and for all x, y [a, b]
y x F (y ) F (x ) .
(which shows theuniform continuity of F )
34
Continue:
Now suppose that f is continuous at c [a, b ].
Thus for any given 0,we get 0 such that
f ( x ) f (c ) whenever x c for all x [a, b ]....(**)
Now using(**) for some s, t [a, b] with s c t satisfying
x c ,we have
t
t
t
s f ( x ) dx
s f ( x ) dx s f (c ) dx
F (t ) F (s )
f (c )
f (c )
t s
t s
t s
t s
1 t
s f ( x ) f (c ) dx
t s
This follows that
F / (c ) f (c )
35
Drawbacks of Riemann Integral
• Although all bounded piecewise continuous functions are
Riemann integrable on a bounded interval, subsequently
more general functions were considered, to which
Riemann's definition does not apply.
• Stieltje formulated an integral called Stietjes integral, to
which Riemann integral is a special case.
• Lebesgue formulated a different definition of integral,
founded in measure theory (a subfield of real analysis).
• Other definitions of integral, extending Riemann's and
Lebesgue's approaches, were proposed.
36
Drawbacks of Riemann Integral
A major limitation towards more widespread implementation of
Bayesian approaches is that obtaining the posterior distribution
often requires the integration of high-dimensional functions. This
can be computationally very difficult, among the several
approaches short of direct integration Markov Chain Monte
Carlo (MCMC) methods is one which attempt to simulate direct
draws from some complex distribution of interest.
MCMC approaches are so-named because one uses the
previous sample values to randomly generate the next sample
value, generating a Markov chain (as the transition probabilities
between sample values are only a function of the most recent
sample value).
37
Drawbacks of Riemann Integral
Markov chain Monte Carlo integration, or MCMC, is a term used
to cover a broad range of methods for numerically computing
probabilities, or for optimization. They are simulation methods,
mostly used in complex stochastic systems where exact
computation and even simple simulation are not computationally
feasible.
Methods that fall under this heading include Metropolis
sampling, Hastings sampling and Gibbs sampling which are for
integration and simulated annealing and sometimes genetic
algorithms which are optimization techniques.
Although these methods are mainly used for complex systems it
can be used to find the exact p-value for a test of association
between the rows and columns of a contingency table.
38
Geometrical meaning of Definite Integrals
• Let f be a real non-negative
continuous function defined in the
closed interval [a, b]. Then
b
a f ( x ) dx is the area of the region
bounded by the function above the x axis
within the vertical lines x a and x b.
39
Area and Definite integral
b
f ( x) dx
Curve
y= f (x)
a
Vertical line
x=b
R
Vertical line
x=a
x0=a
Xn=b
X-axis
40
Geometrical meaning of Definite Integrals
• Let f be a real continuous function (non
negativity is not assured) defined in the
closed interval [a, b]. Then
b
a f ( x ) dx is the algebraic sum of
the areas
above and below the x axis, treating
area above the x axis as positive and
area below the x axis as negative.
41
Area and Definite integral
b
c
b
a
a
c
f ( x ) dx f ( x ) dx f ( x ) dx
A A A A
1
2
1
A1
R1
f
x0=a
c
A2
R2
Xn=b
42
2
Applications of Definite Integrals (1)
(Area of a region)
Let f and g are continuous functions on the interval [a, b] with
f (x) >= g (x) in [a, b]. Then the area A of the region
•
bounded above by the curve y = f (x)
•
below by the curve y = g (x)
• between the vertical line x =a and x = b is given by
A
b
f ( x ) g ( x ) dx
x a
43
Area of the region R bounded by
y = sqrt (x) and y = x.^2
(filled red)
Area between y=sqrt(x) and y=x.2
1.2
1
y=sqrt(x)
0.8
0.6
R
0.4
2
y=x.
2
y=x
0.2
0
x
-0.2
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
44
A x x dx
1
2
0
Area between y=sqrt(x) and y=x.2
1
y=sqrt(x)
0.8
0.6
R
0.4
y=x.22
y=x
0.2
0
x
-0.2
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
45
Application of Definite Integrals (2)
(Volume of solid revolution)
• Theorem: Let S be a solid bounded by two
parallel planes perpendicular to the x-axis at x =
a and x = b [[ y-axis at y = c and y = d ]], If, for
each x in [a, b] [[y in [c, d] ]], the cross sectional
area of S perpendicular to the x-axis is A (x) [[yaxis is B(y) ]], then the volume of the solid is
V
b
A( x ) dx
a
V
B
(
y
)
dy
c
d
46
Solid Revolution
• Let f be continuous and non negative in [a, b] and
let R be the region bounded by y = f (x) above xaxis between x = a and x = b. Then the solid
generated by revolving the region R about the xaxis is such as require in the above theorem
[each cross sectional area is a circular disk with
radius f (x)]. Thus volume of the solid revolution is
A( x ) f ( x ) 2
b
V A( x )dx
a
47
Volume of a Cone (r, h)
Region bounded by y=x/2 above x-axis between 0 and 3
2
1.5
y=x/2
y-axis
1
x=3
0.5
0
-0.5
-0.5
0
0.5
1
1.5
x-axis
2
2.5
3
3.5
48
Volume of a Cone (r, h)
49
A( x ) f ( x ) x / 2 x 2 / 4
2
2
3
V x 2 / 4 dx x 3 / 12 x 3 x 3 / 12 x 0
0
9 / 4
On the other hand, we know volume of a
cone of radius r (=3/2) and height h (=3) is
h 30 3
r x / 2 x 3 3 / 2
V r 2 h / 3 (3 / 2)2 (3) / 3 9 / 4
50
• In fact if someone take y = xr/h as a function in
between x = 0 and x = h, for some positive real
numbers r and h, then the solid generated by
revolving the region, bounded by the line y = xr/h
above x-axis between x = 0 to x = h, would be a
cone of radius r and height h. And thus its
volume is
h
V xr / h dx
2
0
r 2 x 3 / 3h 2 x h r 2 x 3 / 3h 2 x 0
r 2h / 3
51
Application of Definite Integrals (3 & 4)
(Arc length and Surface area)
• As before Definite integral also applied to find
arc length of a curve in 2-space and surface
area of a solid revolution in 3-space by the
following respective formulas :
ds 2 dx 2 dy 2
L
b
b
2
a ds a 1 f ( x ) dx
/
C( x ) 2 f ( x )
b
b
S C( x ) ds 2 f ( x ) 1 f ( x ) dx
/
a
a
2
52
Double Integrals
Let R be a closed region in the xy- plane.
Subdivide R into n-sub-regoins ∆Rk of
area ∆Ak, for k = 1,2,..,n.
Let f (x, y) be a bounded real function of
double variables defined on R .
53
Double Integrals
For each k = 1,2,…,n, Define
diam(R ) sup {d ( p, q ) : p R , q R }
k
k
k
And then max {diam(R ) : k 1, 2,..., n}
k
Also for each k =1,2,…,n, choose
(k , k ) R k
54
Geometrical interpretation of Double Integrals
diam (∆Rk)
R
(k , k )
Elementary sub-region
∆R k of area ∆Ak
55
Geometrical interpretation of Double Integrals
56
Double Integrals
• Then the Double integral of f over the
region R is defined by
n
f ( k , k ) Ak
R f ( x, y ) dA lim
0
k 1
Or eqivalently by
n
f (k , k ) Ak
R f ( x, y ) dA nlim
k 1
Provided the limits exist.
57
Triple Integrals
Let V be a closed bounded three
dimensional region in the space.
Subdivide V into n-subregoins ∆Vk of
volume ∆Vk, for k = 1,2,..,n.
Let f (x, y, z) be a bounded real function
of triple variables defined on V .
58
Triple Integrals
For each k = 1,2,…,n, Define
diam( V ) sup {d ( p, q ) : p V , q V }
k
k
k
And then max {diam(V ) : k 1, 2,...n}
k
Also for each k =1,2,…,n, choose
(k , k ,k ) Vk
59
Triple Integrals
Then the Triple integral of f over the
volume V is defined by
f ( x, y , z ) dV
V
f ( x, y , z ) dV
V
lim
0
n
f ( k , k ,k ) Vk
k 1
Or eqivalently
n
f ( k , k ,k ) Vk
n
k 1
lim
Provided the limits exist.
60
Sufficient condition for
Double and Triple integrals
• In both the cases of Double and Triple, we
have mentioned that the multiple integral
exists if the corresponding limit exists.
• And the limits exist if the functions are
continuous on the corresponding regions.
• And all the properties of single integral
hold here likely.
61
Technique to solve Double integrals
(Fubini’s Theorem)
• Let f be a real continuous function
defined in the closed and bounded
region
R = {(x, y): a<=x<=b, f1(x)<=y<=f2(x)} . Then
R
f ( x, y ) dA f ( x, y ) dy dx
x a y f ( x )
b
f2 ( x )
1
62
Technique to solve Double integrals
(Fubini’s Theorem)
• Let f be a real continuous function
defined in the closed and bounded
region
R = {(x, y): f1(y)<=x<=f2(y), c<=y<=d} . Then
R
g (y )
f ( x, y ) dA f ( x, y ) dx dy
y c x g ( y )
d
2
1
63
Geometrical meaning of Double Integrals
• Let f be a real non-negative
continuous function defined in the
closed and bounded region R . Then
R f ( x, y ) dA is the volume of
the solid
enclosed between the surface z f ( x, y )
and the region R .
64
Geometrical meaning of Double Integrals
• Let f be a real continuous function (nonnegativity is not assured) defined in the
closed and bounded region R . Then
f ( x, y ) dA is the algebraic sum of the
R
volumes above and below the xy plane,
treating volume above the xy plane as
positive and below the plane as negative.
65
Application of Double Integrals (1)
(Area of a region)
• Let R be a closed and bounded region
in the xy-plane. Then
dA is the voume of the solid enclosed
R
between the surface z 1 and the region R ,
which is in value nothing but the area of
the region R .
66
5
A 4 dA 4
R
0
dy dx
25 x 2
0
1
Area of the circle x.2+y.2=25
5
y=sqrt(25-x2)
4
3
R1
2
y-axis
1
0
x=5
x=0
-1
y=0
-2
-3
-4
-5
-6
-4
-2
0
x-axis
2
4
6
67
5
A 4 dA 4
R
0
5
2
dy
dx
4
25
x
dx
0
0
2
x 25 x 2 25
x
x
25
x
25
1
1 x
4
sin
sin
4
2
2
5 x 5
2
2
5 x 0
25
4 . 25 52
2 2
25 x 2
1
Similarly , for circle of radius r has area
r
A 4 dA 4
R
0
r 2 x2
1
0
r
dy dx 4 r 2 x 2 dx
0
2
2
2
x r 2 x2 r 2
x
x
r
x
r
1
1 x
4
sin 4
sin
2
2
2
2
r x r
r x 0
r 2
4 . r 2.
2 2
68
Application of Double integrals (2)
(Volume of a solid )
r
r x
V z dA h dy dx
z-axis
R
xr y r x
2
2
2
h
2
z=h
x2+y2 = r2
R
x-axis
xy-plane
r
y-axis
69
r x
V z dA h dy dx
R
x r y r x
2
r
2
2
r
2h
x r
2
r
r x dx 4h
x 0
2
2
r 2 x 2 dx
x r 2 x 2 r 2 1 x
x r 2 x 2 r 2 1 x
4h
sin 4h
sin
2
r x r
2
r x 0
2
2
r 2
4h. . r 2 h
2 2
It coincide with our well known formula of volume of
a cylinder with radius r and height h is πr2h
70
Application of Double Integrals (3)
(Mass of a lamina)
• If a lamina with continuous density
function σ(x, y) occupies a region R in the
xy-plane, then the mass M of the lamina is
M ( x, y ) dA
R
71
Application of Double Integrals (4)
(Center of gravity or Centroid of a lamina)
• If a lamina with continuous density function σ(x,y)
occupies a region R in the horizontal xy-plane then the
Center of gravity (u, v) of the lamina is
u
x ( x, y ) dA
R
( x, y ) dA
,
R
v
y ( x, y ) dA
R
( x, y ) dA
R
• For uniform density, Center of gravity is Centroid. And this
time σ(x, y)=1 is to be considered.
72
Solving Techniques for Triple Integrals
• Let G be a solid bounded above by the
surface z = g1(x,y) and below by the
surface z=g2(x,y), and R be the projection
of G on the xy-plane. Also, say g1 and g2
are continuous on R , and f (x, y, z) is a
function continuous on G, then
f ( x, y , z ) dV f ( x, y , z ) dz dA
G
R z g ( x ,y )
g 2 ( x ,y )
1
73
Transformation of co-ordinates and
Jacobian
• Let T be a transformation from the uv-plane
to the xy-plane defined by the equations
x=x(u,v) and y=y(u,v), then the Jacobian J
of T is
x
( x, y )
u
J (u,v )
(u,v )
y
u
x
v
y
v
74
Transformation of co-ordinates and Jacobian
• If the transformation x=x(u,v) and y=y(u,v), maps
the region S in the uv-plane to the region R in the
xy-plane and if the Jacobian J(u,v) is non-zero
and does not change sign on S, then with
appropriate restrictions on the transformation and
the region it follows that
f ( x, y ) dA f ( x(u,v ), y (u,v )) J (u,v ) dA
xy
R
uv
S
• Analogous for triple integrals
f ( x, y , z ) dVxyz f ( x (u,v ,w ), y (u,v ,w ), z(u,v ,w )) J (u,v ,w ) dVuvw
G
H
75
Applications of Triple Integrals (1)
(Volume of a solid)
• Let G be a solid bounded above by the
surface z = g1(x,y) and below by the
surface z = g2(x,y), and R be the projection
of G on the xy-plane. Also, say g1 and g2
are continuous on R , then volume of the
solid is
g ( x ,y )
V dV dz dA
G
R z g ( x ,y )
2
1
76
Volume of a sphere with radius r
x 2 y 2 z2 R 2 z R 2 x 2 y 2
R x y
2
2
2
dA
V dV
dz
dA
2
R
x
y
G
R
R
z
R
x
y
2
2
2
R
R2 x2
2
2
2
2 R x y dydx
2
2
2
4 R 2 r 2 r dr 2
r 0
2
2 R 2 r 2 r dr d
r 0 0
x R y R2 x2
R
R
R
R 2 r 2 ( 2r dr )
r 0
2 2
2 2
2 3/ 2
2 3/ 2
( 2 ) R r
R r
r R 3
r 0
3
3
3
/
2
4
R
2
( 2 ). . R 2
.
3
3
77
Applications of Triple Integrals (2)
(Mass of a solid)
• Let a solid with continuous density
function σ (x, y, z) occupies a region G in
the space, then mass M of the solid is
M ( x, y , z ) dV
G
78
Application of Triple Integrals (3)
(Center of gravity and centroid of a solid)
• If a solid with continuous density function σ(x, y, z)
occupies a region G in the space, then the center of
gravity (u, v, w) of the solid is
u
x ( x, y , z ) dV
G
( x, y , z ) dV
G
w
, v
y ( x, y , z ) dV
G
( x, y , z ) dV
,
G
z ( x, y , z ) dV
G
( x, y , z ) dV
G
• For uniform density, center of gravity is centroid. And this
time σ(x, y, z)=1 is to be considered.
79
Line Integrals
(for Scalar functions)
Let
C be a smooth (having smooth
parametrization x = x (t), y = y (t), z = z (t) for
a<=t<=b) curve in the 3-space joining the points
P and Q.
Further, Let f (x, y, z) be a real function defined
on C.
80
Line Integrals
(for Scalar functions)
Subdivide C into n very small sections
using a succession of distinct points
P=P0,P1,P2,..,Pn=Q.
Write ∆sk= length(Pk-1,Pk) for k = 1,2,…,n.
Set ||∆|| = max {∆sk : k = 1,2,…,n}
81
Line Integrals
(for Scalar functions)
For each k = 1,2,…,n, Choose point
(k , k ,k ) on C between Pk 1 and Pk
Then the Line integral of f with respect to s along C is
defined as
n
f ( k , k ,k ) sk Or equivalently
C f ( x, y , z ) ds lim
0
k 1
as
n
f ( k , k ,k ) sk
C f ( x, y , z ) ds lim
n
k 1
Provided the limits exist and does not depend on the choice of partition and points.
82
Geometric interpretation
Pn=Q
Pn*
C
P4*
P3
P4
Pk*
Pk-1
P5*
P1*(ξk, ζk,
P5
ηk )
Pn-1
Pk
∆sk
P3*
P2
P=P0
P1
P2*
83
Evaluating technique of Line integrals
Let C be a curve in space smoothly parameterized by
r(t ) x (t )i y (t ) j z(t )k ; a t b.Then
sk
tk
r / (t ) dt r / (t k * ) t k .
t k 1
Furthermore, if f ( x (t ), y (t ), z(t )) be a real valued
function defined on [a, b ], then
n
*
*
*
/
*
f
(
x
,
y
,
z
)
ds
f
(
x
(
t
),
y
(
t
),
z
(
t
))
r
(
t
) t k
k
k
k
k
k 1
C
b
f ( x (t ), y (t ), z(t )) r / (t ) dt
a
where r / (t k * )
xt 2 y t 2 zt 2
84
Applications of Line Integrals (1)
(Mass of wire)
If C is a smooth curve in 3-space that
models a thin wire and if f (x, y, z) is the
linear density function of the wire, then the
mass M of the wire is given by the line
integral
M f ( x, y , z ) ds
C
85
r / (t k * )
xt 2 y t 2 zt 2
sin(t )
2
cos(t ) 12
2
2
Mass of a helix like wire of density σ = 15-2xy
b
f ( x, y , z ) ds f ( x (t ), y (t ), z(t )) r (t ) dt 15 2 cos(t ).sin(t ) 2 dt
/
C
0
15 sin( 2t ) 2 dt 15 2
0
x = cos(t), y = sin(t), z = t in 0 <= t <= pi
3.5
3
2.5
z-axis
a
2
1.5
1
0.5
0
-1
1
-0.5
0.5
0
0.5
1
x-axis
0
y-axis
86
Applications of Line Integrals (2)
(Length of wire)
If C is a smooth curve in 2-space. Then
the length L of the curve is given by the
line integral
L ds
C
87
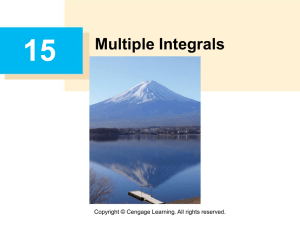
Applications of Line Integrals (3)
(Area of sheet)
If C is a smooth curve in 2space and if f (x, y) is a
nonnegative function defined
on C, then the area A of the
of the sheet (swept out by a
vertical line segment that
extends upward from the
point (x, y) to height f (x, y)
and moves along C from one
end-point P to the other Q) is
given by the line integral.
60
40
20
0
-4
-2
0
2
x
4
-4
-2
0
y
4
2
60
40
20
A f ( x, y ) ds
C
0
y
-4
4
-2
2
0
x
0
2
4
-2
-4
88
Applications of Line Integrals (4)
(Moments of Inertia)
Moments of inertia about the x-axis
y
Ix
2
z
2
f(x, y, z)ds
c
Moments of inertia about the y-axis
Ix
2
2
y
z
f(x, y, z)ds
c
Moments of inertia about the z-axis
Ix
y
2
z
2
f(x, y, z)ds
c
89
Line Integrals
(for Vector fields)
• If
C
is
a
smooth
r=r(t)=x(t)i+y(t)j+z(t)k,
oriented
and
curve
parameterized
by
F=F1(x(t),y(t),z(t))i+F2(x(t),y(t),z(t))j+
F3(x(t),y(t),z(t))k is a continuous vector field over C, then the line
integral of F over C is
C F. d r C F1dx F2 dy F3 dz
90
Theorem
1. If F is conservative i.e. F = f for some f , then every
line integral of F will be independent of path and
C
F dr f x b , y b , z b f x a , y a , z a
where (x(a),y(a),z(a)) is the beginning of the curve and
(x(b),y(b),z(b)) is the end of the path.
2. If every line integral of the form C F dr
independent of path, then F is conservative.
Corollary
F is conservative if and only if
C
is
F dr 0
for any closed path lying inside the domain of F.
91
Applications of Line Integrals (4)
(Work done)
• Suppose
that
under
the
influence of a continuous force
field F a particle moves along a
smooth curve C and that C is
oriented in the direction of
motion of the particle. Then the
work performed by the force field
on the particle is
F. d r
C
• If the integral is positive, then the particle
will gain energy (and usually moves
faster). Otherwise the particle will slow
down.
• In the special case that the force is
always perpendicular to the path, the
total work done will be 0.
92
• Find the work done moving once around an
ellipse C in the xy-plane having center at the
origin and semi major and semi minor axes 4
and 3 respectively with in a force field
F=(3x-4y+2z)i+(4x-2y-3z2)j+(2xz-4y2+z3)k
Soln: In the xy-plane z=0. Thus rewrite
F=(3x-4y)i+(4x-2y)j+(2xz-4y2)k and dr=dx i + dy j
And parameterized C as:
x=4 cos(t), y=3 sin(t), 0<=t<=2*pi.
93
Thus the Work done is given by the line integral
W F.d r (3x 4y )dx ( 4 x 2y ) dy
C
C
2
3.4.cos(t ) 4.3 sin(t ) d (4 cos(t )) 4.4.cos(t ) 2.3 sin(t ) d (3 sin(t ))
t 0
2
48cos(t ) sin(t ). sin(t )(dt )) 16 cos(t ) 6 sin(t ).3 cos(t )(dt )
t 0
2
2
t 0
t 0
48 30.cos(t ).sin(t ) dt 48 15.sin(2t ) dt 48 * 2 96
94
Ampere's Law
• The line integral of a
magnetic field around a
closed path C is equal to
the total current flowing
through
the
area
bounded by the contour
C. This is expressed by
the formula
• Where 0 is the vacuum
permeability
constant,
equal to H/m.
B.dr 0I
C
95
Faraday's Law
• The electromotive
force ε induced
around a closed
loop C is equal to
the rate of the
change
of
magnetic flux ψ
passing
through
the loop.
C
d
E.dr
dt
96
Green’s Theorem
• Let R be a simply connected plane
region bounded by a simple
closed
piecewise
smooth
counterclock-wise oriented curve
C. If F=F1(x,y)+F2(x,y) be a function
with component functions are
continuous and having continuous
partial derivatives on some region
containing R , then
F.dr
C
R
F1
F2
x y dA
97
References
1.
D V Widder (1961), Advanced Calculus, PHL Learning Private Ltd.
2.
H Anton, I Bivens, S Davis (2008), Calculus, 8th edition, John
Willey and Sons.
3.
MR Spigel, Theory and Problems of Advanced Calculus, SI
(Metric) Edition, Schaum’s Outline Series..
4.
W Rudin (1976), Principles of Mathematical Analysis, 3rd Edition,
Mcgraw-Hill International
5.
www.google.com
98
THANKS
EVERYBODY
QUESTIONS???
99