Nonlinear Data Assimilation
advertisement

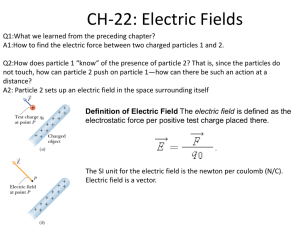
Nonlinear Data Assimilation using an extremely efficient Particle Filter Peter Jan van Leeuwen Data-Assimilation Research Centre University of Reading The Agulhas System In-situ observations In-situ observations In situ observations Transport through Mozambique Channel Data assimilation Uncertainty points to use of probability density functions. P(u) 0.0 0.5 1.0 u (m/s) Data assimilation: general formulation Bayes theorem: Solution is pdf! NO INVERSION !!! How is this used today? • Present-day data-assimilation systems are based on linearizations and search for one optimal state: • (Ensemble) Kalman filter: assumes Gaussian pdf’s • 4DVar: smoother assumes Gaussian pdf for initial state and observations (no model errors) • Representer method: as 4DVar but with Gaussian model errors • Combinations of these Prediction: smoothers vs. filters • The smoother solves for the mode of the conditional joint pdf p( x0:T | d0:T) (modal trajectory). • The filter solves for the mode of the conditional marginal pdf p( xT | d0:T). For linear dynamics these give the same prediction. • Filters maximize the marginal pdf • Smoothers maximize the joint pdf These are not the same for nonlinear problems !!! Example Nonlinear model 2 x n xn+1 = 0.5 xn + _________ + nn 1 + e (xn - 7) Initial pdf x0 ~ N(-0.1, 10) Model noise nn ~ N(0, 10) Example: marginal pdf’s Note: mode is at x= - 0.1 Note: mode is at x=8.5 0.15 0.15 0.1 0.1 0.05 0.05 0 0 -15 -10 -5 0 x0 5 10 15 -40 -30 -20 -10 0 xn 10 20 30 Example: joint pdf Mode joint pdf x0 Modes marginal pdf’s xn And what about the linearizations? • Kalman-like filters solve for the wrong state: gives rise to bias. • Variational methods use gradient methods, which can end up in local minima. • 4DVar assumes perfect model: gives rise to bias. Where do we want to go? • Represent pdf by an ensemble of model states • Fully nonlinear Time How do we get there? Particle filter? Use ensemble with the weights. What are these weights? • The weight w_i is the pdf of the observations given the model state i. • For M independent Gaussian distributed observation errors: Standard Particle filter Particle Filter degeneracy: resampling • With each new set of observations the old weights are multiplied with the new weights. • Very soon only one particle has all the weight… • Solution: Resampling: duplicate high-weight particles are abandon low-weight particles Problems • Probability space in large-dimensional systems is ‘empty’: the curse of dimensionality u(x1) u(x2) T(x3) Standard Particle filter Not very efficient ! Specifics of Bayes Theorem I We know from Bayes Theorem: Now use : in which we introduced the transition density Specifics of Bayes Theorem II This can be rewritten as: q is the proposal transition density, which might be conditioned on the new observations! This leads finally to: Specifics of Bayes Theorem III How do we use this? A particle representation of Giving: Now we choose from the proposal transition density for each particle i. Particle filter with proposal density Stochastic model Proposed stochastic model: Leads to particle filter with weights Meaning of the transition densities = the probability of this specific value for the random model error. For Gaussian model errors we find: A similar expression is found for the proposal transition Particle filter with proposal transition density Experiment: Lorentz 1963 model (3 variables x,y,z, highly nonlinear) x-value Measure only X-variable y-value Standard Particle filter with resampling 20 particles Typically 500 particles needed ! X-value Time Particle filter with proposal transition density 3 particles X-value Time Particle filter with proposal transition density 3 particles Y-value (not observed) Time However: degeneracy • For large-scale problems with lots of observations this method is still degenerate: • Only a few particles get high weights; the other weights are negligibly small. • However, we can enforce almost equal weight for all particles: Equal weights 1. Write down expression for each weight with q deterministic: Prior transition density Likelihood 2. When H is linear this is a quadratic function in for each particle. 3. Determine the target weight: Almost Equal weights I 1 4 3 Target weight 2 5 4. Determine corresponding model states, e.g. solving alpha in Almost equal weights II • But proposal density cannot be deterministic: • Add small random term to model equations from a pdf with broad wings e.g. Gauchy • Calculate the new weights, and resample if necessary Application: Lorenz 1995 N=40 F=8 dt = 0.005 T = 1000 dt Observe every other grid point Typically 10,000 particles needed Ensemble mean after 500 time steps 20 particles Position Ensemble evolution at x=20 20 particles Time step Ensemble evolution at x=35 (unobserved) 20 particles Isn’t nudging enough? Only nudged Nudged and weighted Isn’t nudging enough? Unobserved variable Only nudged Nudged and weighted Conclusions The nonlinearity of our problem is growing Particle filters with proposal transition density: • solve for fully nonlinear solution • very flexible, much freedom • application to large-scale problems straightforward Future • Fully nonlinear filtering (smoothing) forces us to concentrate on the transition densities, so on the errors in the model equations. • What is the sensitivity to our choice of the proposal? • What can we learn from studying the statistics of the ‘nudging’ terms? • How do we use the pdf???