階層モデル(Hierarchical Modeling
advertisement

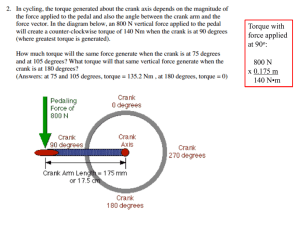
6,階層的モデリング インタラクティブCG05S 蔡 東生 参考文献 • CGテキスト 2−4−3 • Angel 9.1-9.6,9.8 • OpenGL プログラミングガイド、 レッドブック、3章 記号とインスタンス • ほとんどのグラフィックAPIはいくつかの幾何 的プリミティブをもっている: – 球、立方体、円筒 – これらの手続き関数は点(points)を与えてくれる。 しかしこれらの手続き関数は点Pでしかない • これらの記号はインスタンス変換を通して実 体化・インスタンス化される – これらの点はもともと局所座標系をつかい定義さ れている(例、単位立方体) Q:上記のインスタンス変換はどのような行列 か? プリミティブをつなげる 3次元の例:ロボット アーム • 3自由度を持つロボットアームに ついて考えてみよう – Baseは垂直軸まわりにθ回転 – Lower armはxy-平面内Φ回転 – Upper armはxy-平面内Ψ回転 Q:baseの変換にどのような行列を用いるか? Q:upper armの変換にはどのような行列か? Q:lower armの変換にはどのような行列か? ロボットアームの実装 • ロボットアームはグローバル行列 を保持しつつ、毎ステップごとに計 算できる 行列計算を繰り返すのは無駄!??? よりよいロボットアーム の実装 • グローバル行列を毎回計算しなおすかわ りに、グローバル行列にその場所に応じ た新しい行列を右掛けしていく OprnGLにおけるロボットアー ム実装 • OpenGLはmodel-view matrixというグ ローバル状態行列を保持してい る,model-view matrixは場所場所に変換 行列を右掛けしていくことによりアップ デートされていく ObjectAxes.cpp 階層的モデリング • 階層的モデルはツリーもしくは DAGsを使ったインスタンスによって 構成される • エッジは幾何学的変換を含む • ノードは幾何形状(と描画属性)を含 む Q:ロボットアームの場合はどうなるで あろうか? 複雑な例:人間の人体 モデル Q:もっとも合理的にこのツリーを横断するには どうすればいいか? Modeling with Transformation • You’ve learned everything you need to know to make a stick person out of cubes. • Just translate, rotate, and scale each one to get the right size, shape, position, and orientation. • Looks great, until you try to make it move. The Right Control Knobs • As soon as you want to change something, the model falls apart • Reason: the thing you’re modeling is constrained but your model doesn’t know it • Wanted: – some sort of representation of structure – a set of “control knobs” (parameters) that make it easy to move our stick person through legal configurations • This kind of control is convenient for static models, and vital for animation! • Key: structure the transformations in the right way: using a Making an Articulated Model r A pB q • A minimal 2-D jointed object: – Two pieces, A (“forearm”) and B (“upper arm”) – Attach point q on B to point r on A (“elbow”) – Desired control knobs: • T: shoulder position (point at which p winds up) • u: shoulder angle (A and B rotate together about p) • v: elbow angle (A rotates about r, which stays attached to p) Making an Arm, step 1 r A • Start with A and B in their untransformed configurations (B is hiding behind A) • First apply a series of transformations to A, leaving B where it is… Making an Arm, step 2 r A pB q r A • Translate by -r, bringing r to the origin • You can now see B peeking out from behind A Making an Arm, step 3 pB q r A pB q • Next, we rotate A by v (the “elbow” angle) Making an Arm, step 4 pB q pB q • Translate A by q, bringing r and q together to form the elbow joint • We can regard q as the origin of the elbow coordinate system, and regard A as being in this coordinate system. Making an Arm, step 5 pB q pB q • From now on, each transformation applies to both A and B (This is important!) • First, translate by -p, bringing p to the origin • A and B both move together, so the elbow doesn’t separate! Making an Arm, step 6 pB q • Then, we rotate by u, the “shoulder” angle • Again, A and B rotate together Making an Arm, step 7 • Finally, translate by T, bringing the arm where we want it • p is at origin of shoulder coordinate system So What Have We Done? • Seems more complicated than just translating and rotating each piece separately • But the model is easy to modify/animate: – Remember the transformation sequence, and the parameters you used—they’re part of the model. – Whenever the parameters change, reapply all of the transformations and draw the result • The model will not fall apart!!! • Note: – u, v, and T are parameters of the model. – but p, q, and r are structural constants. – Changing u,v, or T wiggles the arm – Changing p,q, or r dismembers it (useful only in video games) Transformation Hierarchies • This is the build-an-arm sequence, represented as a tree • Interpretation: Trans T Rot u Trans -p Trans q Rot v Trans -r B – Leaves are geometric primitives – Internal nodes are transformations – Transformations apply to everything under them—start at the bottom and work your way up • You can build a wide range of models this Control way Knob Primitive A Structural Transformation Hierarchies • Another point of view: • The shoulder coordinate transformation moves everything below it with respect to the shoulder: Trans T Rot u Trans -p Trans q Rot v Trans -r A B –B – A and its transformation • The elbow coordinate transformation moves A with respect to the elbow Shoulder coordinate xform Elbow coordinate xform Primitive A Schematic Humanoid • Each node represents hip torso l. leg1 r. leg1 shoulder l. leg2 r. leg 2 l. arm1 r. arm1 neck l. arm2 r. arm2 head – rotation(s) – geometric primitive(s) – struct. transformations • The root can be anywhere. We chose the hip (can re-root) • Control knob for each joint angle, plus global position and orientation • A realistic human would be much more Directed Acyclic • This is a graph, so you can re-root it. Graph • It’s directed, rendering traversal hip only follows links one way. • It’s acyclic, to avoid infinite loops in torso l. leg1 r. leg1 rendering. • Not necessarily a tree. shoulder l. leg2 r. leg 2 – e.g. l.arm2 and r.arm2 l. arm1 r. arm1 neck l. arm2 r. arm2 head primitives might be two instantiations (one mirrored) of the same geometry OpenGLにおける人体 モデルの実装 o-link arm, revisited, in Open Trace of Opengl calls glLoadIdentity() ; glOrtho(…); glPushMatrix(); glTranslatef(Tx, Ty,0); glRotatef(u,0,0, 1); glTranslatef(px,-py,0); glPushMatrix(); glTranslatef(qx, qy,0); glRotatef(v,0,0, 1); glTranslatef(rx,-ry,0); Draw(A); glPopMatrix(); Draw(B); glPopMatrix(); Trans T Rot u Trans -p Trans q Rot v Trans -r A B 変換の順番 • 最初の家のモデルに戻って考えよ う • 変換される家を書くためには、 OpenGLでは以下のようにプログラ ムを書く • ここで注意すべきは、複合変換行 列を作るためには左からスタートし てそれぞれの変換行列をその後に 右掛けしていくことである グローバル、固定座標 系システム • 変換を考える一つのやり方は 各点の動きをグローバル、固 定座標系で考えることである – 変換行列を左から右に、T, R, S の順番で掛け合わせていく – 次に変換行列をオブジェクト点に 掛ける:複合行列TRSをPの全て の点に掛け合わせる • この変換は点を全て最初の位置か ら最終位置に移す 局所、座標変換システ ム • もう一つの変換の考え方はプリミティ ブが最終的に描かれる局所座標系 に作用させることである • これは先に述べた方法と全く同じ アニメーション • 上記の例は関節モデル (Articulated Model)とよばれ – 固体部品 – ジョイント(関節)接続 • これらは時間の関数としてジョ イント角度(あるいは他の表示 パラメター)を決めることにより アニメーションできる キーフレームアニメーション • もっとも一般的につくられるキャラク タアニメーションはキーフレームア ニメーションである – それぞれのジョイントは様々なキーフ レームで定義される – システムはキーフレーム間を補間する これを行うには以下のことが必要: ーなめらかなキーフレーム間の補間:ス プライン ーとても良いインタラクティブシステム ーアニメータの高度な技術 シーングラフ • 階層的モデリングの考えは全 体のシーンにも適応される – 多くの異なるオブジェクト – ライト – カメラ位置 • これらはシーンツリーとかシー ングラフと呼ばれている まとめ • 以下のことを覚えよう • 太文字の用語 • 幾何学変換を使いどのようにしてプ リミティブは実体化(インスタンス 化)し階層的モデルを作るか • どのようにしてツリー、DAGモデル は階層的モデリングに使われてい るか • OpenGL変換は階層的モデルでど のように使われているか • キーフレームアニメーションはどう 作用するか