Chapter 6
advertisement

Graphs
Chapter 6
SFO
LAX
Graphs
ORD
DFW
1
Graph
• A graph is a pair (V, E), where
– V is a set of nodes, called vertices
– E is a collection (can be duplicated) of pairs of vertices, called edges
– Vertices and edges are data structures and store elements
• Example:
– A vertex represents an airport and stores the three-letter airport code
– An edge represents a flight route between two airports and stores the mileage
of the route
PVD
ORD
SFO
LGA
HNL
LAX
DFW
Graphs
MIA
2
Edge Types
• Directed edge
–
–
–
–
ordered pair of vertices (u,v)
first vertex u is the source or origin
second vertex v is the destination
e.g., a flight
flight
ORDAA 1206
PVD
• Undirected edge
– unordered pair of vertices (u,v)
– e.g., a flight route
• Directed graph (digraph)
ORD
849
miles
PVD
– all the edges are directed
– e.g., flight network
• Undirected graph
– all the edges are undirected
– e.g., route network
Graphs
3
Applications
cslab1a
cslab1b
• Electronic circuits
math.brown.edu
– Printed circuit board
– Integrated circuit
cs.brown.edu
• Transportation networks
– Highway network
– Flight network
brown.edu
qwest.net
att.net
• Computer networks
– Local area network
– Internet
– Web
cox.net
John
• Databases
Paul
David
– Entity-relationship diagram
Graphs
4
Terminology
• End vertices (or endpoints) of an
edge
– U and V are the endpoints of a
• Edges incident on a vertex
a
V
b
h
– a, d, and b are incident on V
• Adjacent vertices – share edge
– U and V are adjacent
U
d
X
c
• Degree of a vertex
– X has degree 5
e
W
• Parallel edges (go between same
nodes)
j
Z
i
g
f
– h and i are parallel edges
Y
• Self-loop (same nodes is
origin/destination)
– j is a self-loop
Graphs
5
Terminology (cont.)
• Simple graphs have no parallel (multiple
edges between same vertices) or self loop
• Path
– sequence of alternating vertices and edges
which match up
• Cycle - path with same first and last
vertex
• Simple path
a
U
– path such that all its vertices and edges
are distinct
• Examples
– P1=(V,b,X,h,Z) is a simple path
– P2=(U,c,W,e,X,g,Y,f,W,d,V) is a path
that is not simple
Graphs
c
V
b
d
P2
P1
X
h
Z
e
W
g
f
Y
6
Terminology (cont.)
• Simple cycle
– cycle such that all its vertices and
edges are distinct
• Connected graph/component
• (Spanning – contains all vertices)
subgraph
• Forest (acyclic), free (no root) trees
(connected forest), spanning tree
• Examples
– C1=(V,b,X,g,Y,f,W,c,U,a,) is a
simple cycle
– C2=(U,c,W,e,X,g,Y,f,W,d,V,a,) is
a cycle that is not simple
Graphs
a
U
c
V
b
d
C2
X
e
C1
g
W
f
h
Z
Y
7
Properties
Property 1
Notation
Sv deg(v) = 2m
n
m
deg(v)
Proof: each edge is counted
twice
number of vertices
number of edges
degree of vertex v
Property 2
In an undirected graph with
no self-loops and no
multiple edges
m n (n - 1)/2
Proof: each vertex has degree
at most (n - 1)
Example
n = 4
m = 6
deg(v) = 3
What is the bound for a
directed graph?
Graphs
8
Main Methods of the Graph ADT
• Vertices and edges
• Update methods
– are positions
– store elements
–
–
–
–
–
• Accessor methods
–
–
–
–
–
–
–
–
aVertex()
incidentEdges(v)
endVertices(e)
isDirected(e)
origin(e)
destination(e)
opposite(v, e)
areAdjacent(v, w)
insertVertex(o)
insertEdge(v, w, o)
insertDirectedEdge(v, w, o)
removeVertex(v)
removeEdge(e)
• Generic methods
–
–
–
–
Graphs
numVertices()
numEdges()
vertices()
edges()
9
Edge List Structure
•
•
•
•
We could just store a list of nodes and a list of edges.
Vertex info: name, id, degree, …
Edge info: directed?, endpoints, weight
It wouldn’t be all that convenient for doing a traversal, but
if our operations involved looking at each edge or each
node, it would be simple.
• Note: edges point to vertexes (not visa versa)
10
Edge List Structure
• Vertex object
u
– element
– reference to position in
vertex sequence
a
c
b
d
v
w
z
• Edge object
–
–
–
–
element
origin vertex object
destination vertex object
reference to position in
edge sequence
u
z
w
v
• Vertex sequence
– sequence of vertex objects
a
• Edge sequence
b
c
d
– sequence of edge objects
Graphs
11
Adjacency List Structure
• Edge list structure
• Incidence sequence for each
vertex
– sequence of references to edge
objects of incident edges
• Augmented edge objects
– references to end vertices
12
Adjacency Matrix Structure
• Edge list structure
• Augmented vertex objects
a
v
b
u
w
– Integer key (index)
associated with vertex
• 2D adjacency array
– Reference to edge object
for adjacent vertices
– Null for non nonadjacent
vertices
0
u
1
0
• The “old fashioned”
version just has 0 for no
edge and 1 for edge
0
Graphs
2
1
w
2
1
a
2
v
b
13
Asymptotic Performance
n vertices, m edges
no parallel edges
no self-loops
Bounds are “big-Oh”
Edge
List
Adjacency
List
Adjacency
Matrix
Space
n+m
n+m
n2
incidentEdges(v)
areAdjacent (v, w)
m
m
deg(v)
min(deg(v), deg(w))
n
1
insertVertex(o)
1
1
n2
insertEdge(v, w, o)
1
1
1
removeVertex(v)
removeEdge(e)
m
1
deg(v)
1
n2
1
Graphs
14
Traversals
• Visit each node – e.g., web crawler
• Have to restart traversal in each connected
component, but this allows us to identify
components
• Reachability in a digraph is an important
issue – the transitive closure graph
• Book permits counter-direction motion in
general traversals
15
What is meant by depth first
search?
• Go deeper rather than broader
• Requires recursion or stack
• Used as a general means of traversal
16
Code for adjacency list implementation
class Node {
int ID;
String nodeLabel;
EdgeList adj; // successors
public String toString()
{ return ID + nodeLabel ;
}
}
class Edge {
int from; // endpoint of start node
int to; // endpoint of end node
}
class EdgeList
{
EdgeList next;
Edge e;
}
public class Graph{
final static int SIZE = 20;
Node [] nodes = new Node[SIZE];
}
17
At your seats
Write the code to visit every node and print its
name in the order it is visited. Note that
with graphs, you may find yourself going in
circles if you don’t mark the nodes as
“visited” in some way.
18
Looking for a spanning Tree
• Spanning tree: all of nodes and some of
edges.
• Like a calling tree – make sure all are
informed
• Many times algorithms depend on some
ordering of the nodes of a graph
• Labeling the edges is some way is helpful in
organizing thinking about a graph
19
Depth-First Search
(undirected graph)
• Simple recursive backtracking algorithm
calls recursive function at starting point
– For each incident edge to a vertex
• If opposite (other) vertex is unvisited
– Label edge as “discovery”
– Recur on the opposite vertex
• Else label edge as “back”
• Discovery edges form a component
spanning tree, back edges go to an ancestor
• with m edges, O(m) using an adjacency list,
20
but not using an adjacency matrix
Depth First Search
• Notice in the next diagram that multiple
steps are shown between each set of
pictures.
• Discovery edges (tree edges) are drawn
with solid black lines. Back edges are
drawn with dashed lines.
• The current node is shown in solid black
21
Depth-First Traversal
22
Given this code, find dfs numbers
class Node {
int ID;
int dfsNum;
String nodeLabel;
EdgeList adj; // successors
public String toString()
{ return ID + nodeLabel ;
}
}
class Edge {
int from; // endpoint of start node
int to; // endpoint of end node
int edgeType: {BACK, TREE,
CROSS, FORWARD}
}
class EdgeList
{
EdgeList next;
Edge e;
}
public class Graph{
final static int SIZE = 20;
Node [] nodes = new Node[SIZE];
}
23
DFS Algorithm
•
The algorithm uses a mechanism for
setting and getting “labels” of
vertices and edges
Algorithm DFS(G)
Input graph G
Output labeling of the edges of G
as discovery edges and
back edges
for all u G.vertices()
setLabel(u, UNEXPLORED)
for all e G.edges()
setLabel(e, UNEXPLORED)
for all v G.vertices()
if getLabel(v) = UNEXPLORED
DFS(G, v)
Algorithm DFS(G, v)
Input graph G and a start vertex v of G
Output labeling of the edges of G
in the connected component of v
as discovery edges and back edges
setLabel(v, VISITED)
for all e G.incidentEdges(v)
if getLabel(e) = UNEXPLORED
w G.opposite(v,e)
if getLabel(w) = UNEXPLORED
setLabel(e, DISCOVERY)
DFS(G, w)
else
setLabel(e, BACK)
Depth-First Search
24
Example
A
A
unexplored vertex
visited vertex
unexplored edge
discovery edge
back edge
A
B
E
D
E
C
A
B
D
A
D
E
C
B
C
Depth-First Search
25
Example (cont.)
A
B
A
D
E
B
C
C
A
A
B
D
E
B
C
D
E
D
E
C
Depth-First Search
26
DFS and Maze Traversal
• The DFS algorithm is
similar to a classic
strategy for exploring a
maze
– We mark each
intersection, corner and
dead end (vertex) visited
– We mark each corridor
(edge ) traversed
– We keep track of the
path back to the entrance
(start vertex) by means
of a rope (recursion
stack)
Depth-First Search
27
Properties of DFS
Property 1
DFS(G, v) visits all the
vertices and edges in the
connected component of v
A
Property 2
The discovery edges
labeled by DFS(G, v)
form a spanning tree of
the connected component
of v
B
Depth-First Search
D
E
C
28
Complexity of DFS
• DFS runs in O(n + m) time provided the graph is
represented by the adjacency list structure
Depth-First Search
29
Biconnectivity (This material
replaces that in section 6.3.2)
We worry about points
of failure in the graph.
SEA
PVD
ORD
SNA
FCO
MIA
30
Separation Edges and Vertices
•
•
•
Definitions
– Let G be a connected graph
– A separation edge of G is an edge whose removal disconnects G
– A separation vertex of G is a vertex whose removal disconnects G
– A graph is bi-connected if for any two vertices of the graph there are two
disjoint paths between them (or a simple path with joins them)
Applications
– Separation edges and vertices represent single points of failure in a network
and are critical to the operation of the network
Example
– DFW, LGA and LAX are separation vertices
– (DFW,LAX) is a separation edge
ORD
PVD
SFO
LGA
HNL
LAX
DFW
MIA
31
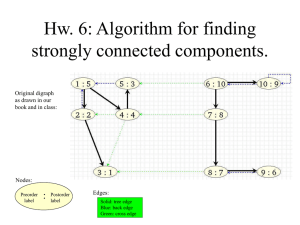
Finding Articulation points
1. Do a depth first search, numbering the nodes as they are visited in
preorder. Call the numbers num(v). If a node has already been visited,
we consider the edge to it as a “back edge”. The undirected edges
become “directed” by the order they are visited.
2. The root is an articulation point if it has two children. Its removal
would create two subtrees.
3. For each node, compute the lowest vertex that can be reached by zero
or more tree edges followed by possibly one back edge.
Low(v) is the minimum of
1. Num(v)
[taking no edges]
2. the lowest back edge among all back edges (v,w) [no tree edges]
3. The lowest Low(w) among all tree edges (v,w) [some tree edges
and a back edge]
32
To compute Low, we need a postorder
traversal.
Given Low, we find articulation points as:
1. The root is an articulation point if it has
more than one child
2. Any other vertex v is an articulation point if
and only if v has some child (w) in the tree
such that Low(w) >=Num(v)
33
In the example below, notice
• C is an articulation point
as C has a child G and
Low(G) >=Num(C).
• D is an articulation point
as Low(E) >=Num(D).
34
So how do we compute Low?
35
What is the complexity?
• Assign DFS Numbers
• Assign Low
• Examine nodes for articulation point
If we don’t know which is greater n (the
number of nodes) or m (the number of
edges), we show it as O(n+m)
36
Breadth-First Search
• By levels, typically using queues
37
BFS Facts
• There are discovery (tree) and cross edges
(why no back edges?) –
Once marked, don’t follow again.
• Tree edges form spanning tree
• Tree edges are paths, minimal in length
• Cross edges differ by at most one in level
• Try writing the code to do a BFS
38
Thm 6.19: Algorithms based on
BFS
•
•
•
•
Test for connectivity
compute spanning forest
compute connected components
find shortest path between two points (in number
of links)
• compute a cycle in graph, or report none
• (have cross edges)
• Good for shortest path information, while DFS
better for complex connectivity questions
39
Digraphs
• A digraph is a graph
whose edges are all
directed
E
D
– Short for “directed graph”
• Applications
– one-way streets
– flights
– task scheduling
Fundamental issue is
reachability
C
B
A
40
Complexity
• For each node in a digraph, how would you
see which other nodes are reachable from
that node?
• What would the complexity be?
41
E
Digraph Properties
D
C
B
• A graph G=(V,E) such that
– Each edge goes in one direction:
A
• Edge (a,b) goes from a to b, but not b to a.
• If G is simple, m < n*(n-1) – at most an edge
between each node and every other node.
• If we keep in-edges and out-edges in separate
adjacency lists, we can perform listing of in-edges
and out-edges in time proportional to their size.
42
Digraph Application
• Scheduling: edge (a,b) means task a must be
completed before b can be started
ics21
ics22
ics23
ics51
ics53
ics52
ics161
ics131
ics141
ics151
ics121
ics171
The good life
43
Digraph Facts
• Directed DFS gives directed paths from root to
each reachable vertex
• Used for O(n(n+m)) algorithm [dfs is O(n+m),
these algorithms use n dfs searches]
– Find all induced subgraphs (from each vertex, v, find
subgraph reachable from v)
– Test for strong connectivity
– Compute the transitive closure
• Directed BFS has discovery, back, cross edges
44
Directed DFS
• We can specialize the traversal
algorithms (DFS and BFS) to
digraphs by traversing edges
only along their direction
• In the directed DFS algorithm,
we have four types of edges
–
–
–
–
discovery edges
back edges (to ancestor)
forward edges (to descendant)
cross edges (to other)
• A directed DFS starting at
avertex s determines the vertices
reachable from s
E
D
C
B
A
45
Reachability
• DFS tree rooted at v: vertices reachable from v
via directed paths
E
E
D
C
A
D
C
F
A
E
B
D
C
A
F
B
46
Strong Connectivity
• Each vertex can reach all other vertices
a
g
c
d
e
f
b
47
Strong Connectivity
Algorithm
Pick a vertex v in G.
•
• Perform a DFS from v in G.
a
G:
– If there’s a w not visited, return not
strongly connected
d
• Let G’ be G with edges reversed.
• Perform a DFS from v in G’.
– If there’s a w not visited, return not
strongly connected
– Else, return strongly connected
e
b
f
a
G’:
g
c
d
• Running time: O(n+m).
g
c
e
b
f
48
Strongly Connected
Components
• Maximal subgraphs such that each vertex can reach all
other vertices in the subgraph
• Can also be done in O(n+m) time using DFS, but is more
complicated (similar to biconnectivity).
a
c
d
f
g
{a,c,g}
b
{f,d,e,b}
e
49
Transitive Closure
• Given a digraph G, the
transitive closure of G is the
digraph G* such that
– G* has the same vertices as
G
– if G has a directed path
from u to v (u v), G* has a
directed edge from u to v
• The transitive closure provides
reachability information about
a digraph
D
E
B
C
G
A
D
E
B
C
A
G*
50
Computing the Transitive
Closure If there's a way to get
• We can perform
DFS starting at each
vertex
from A to B and from
B to C, then there's a
way to get from A to C.
– O(n(n+m))
Alternatively ... Use
dynamic programming:
The Floyd-Warshall
Algorithm
51
Floyd-Warshall Transitive
Closure
• Idea #1: Number the vertices 1, 2, …, n.
• Idea #2: Consider paths that use only vertices
numbered 1, 2, …, k, as intermediate
vertices:
i
Uses only vertices numbered 1,…,k
(add this edge if it’s not already in)
j
Uses only vertices
numbered 1,…,k-1
k
Uses only vertices
numbered 1,…,k-1
52
Floyd-Warshall’s Algorithm
• Floyd-Warshall’s algorithm
numbers the vertices of G as v1
, …, vn and computes a series
of digraphs G0, …, Gn
– G0=G
– Gk has directed edge (vi, vj) if
G has directed path from vi to
vj with intermediate vertices
in the set {v1 , …, vk}
• We have that Gn = G*
• In phase k, digraph Gk is
computed from Gk - 1
• Running time: O(n3), assuming
areAdjacent is O(1) (e.g.,
adjacency matrix)
Algorithm FloydWarshall(G)
Input digraph G (vertices numbered)
Output transitive closure G* of G
G0 G
for k 1 to n do
Gk Gk - 1
for i 1 to n (i k) do
for j 1 to n (j i, k) do
if Gk - 1.areAdjacent(vi vk)
Gk - 1.areAdjacent(vk vj)
if Gk.areAdjacent(vi vj)
Gk.insertDirectedEdge(vi vj)
return Gn
53
Floyd-Warshall Example
v7
BOS
ORD
v4
JFK
v2
v6
SFO
DFW
LAX
v1
v3
MIA
v5
54
1
2
3
1
4
5
6
7
y
2
3
y
4
5
y
y
y
y
y
6
y
7
y
y
y
55
Floyd-Warshall, Conclusion
v7
BOS
ORD
v4
JFK
v2
v6
SFO
DFW
LAX
v1
v3
MIA
v5
56
Recursion
• What if you didn’t want to use recursion to
do a DFS?
• You could turn the parent edge around to
tell you how to get back.
• This is termed doing a DFS “in-place”
• Obviously the edge would have to be
flipped again after the call
57
DAGs and Topological Ordering
D
•
A directed acyclic graph (DAG) is a
digraph that has no directed cycles
• A topological ordering of a digraph is
a numbering
v1 , …, vn
of the vertices such that for every edge
(vi , vj), we have i < j
• Example: in a task scheduling digraph,
a topological ordering a task sequence
that satisfies the precedence
v2
constraints
Theorem
A digraph admits a topological
v1
ordering if and only if it is a DAG
E
B
C
DAG G
A
D
B
C
A
v4
E
v5
v3
Topological
ordering of G
58
Topological Sorting
• Number vertices, so that (u,v) in E implies u < v
wake up
1
A typical student day
3
2
study computer sci.
eat
4
7
play
nap
8
write c.s. program
9
make cookies
for professors
5
more c.s.
6
work out
10
sleep
11
dream about graphs
59
Algorithm for Topological Sorting
For each vertex compute its indegree
Keep a set S of all vertices with indegree 0
num = 0;
While S is not empty
{ u = s.pop()
u.number = ++num;
for each of u’s successors w
w.indegree—
if (w.indegree ==0) S.add(w)
}
if (num <nodeCt) graph has a directed cycle (text differs)
60
•Topological Sorting DFS
Algorithm
•
Simulate the algorithm by using
depth-first search
Algorithm topologicalDFS(G)
Input dag G
Output topological ordering of G
n G.numVertices()
for all u G.vertices()
setLabel(u, !VISITED)
for all v G.vertices() which have
no incoming edges.
if getLabel(v) != VISITED
topologicalDFS(G, v)
•
O(n+m) time.
Algorithm topologicalDFS(G, v)
Input graph G and a start vertex v of G
(having no input arcs from unvisited nodes)
Output labeling of the vertices of G
in the connected component of v
setLabel(v,VISITED)
for all edges (v,w)
if getLabel(w) = !VISITED
topologicalDFS(G, w)
Label v with topological number n
nn-1
61
Topological Sorting Example
a
d
b
c
i
e
f
g
h
62
Topological Sorting Example
2
d
3
4
6
5
7
8
9
63
Topological Sorting Example
2
1
3
4
6
5
7
8
9
64