PRUNam
advertisement

UNAM
Dr. Leonid Fridman
NEW TRENDS IN SLIDING
CONTROL MODE
L. Fridman
Universidad Nacional Autónoma de México
División de Posgrado, Facultad de en Ingeniería
Edificio ‘A’, Ciudad Universitaria
C.P. 70-256, México D. F.
lfridman@verona.fi-p.unam.mx
14 MAYO DE 2004
1
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
Given a system
x2
x1 x 2
x 2 u f ( x , t )
u s gn( )
f(x,t)
u
x
0
(0) 1
2
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
1
sin( t ) sgn( )
2
0
3
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
Motivations
Given a system
x1 x 2
x 2 u f ( x , t )
f(x,t)
u
x
0
Problem formulation: Design control function u to provide asymptotic
stability
lim x1 lim x 2 0
t
t
in presence of bounded uncertain term f ( x , t ) L , that contains model
uncertainties and external disturbances.
4
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
Basics of Sliding Mode Control
x(0)
Desired compensated error dynamics (sliding surface):
x 1 cx 1 0
x1 x1 ( 0 ) e
ct
, x 2 cx 1 ( 0 ) e
ct
•The purpose of the Sliding Mode Controller (SMC) is to drive a system's
trajectory to a user-chosen surface, named
•sliding surface, and to maintain the plant's state trajectory on this surface
thereafter. The motion of the system on the sliding surface is named
•sliding mode. The equation of the sliding surface must be selected such
that the system will exhibit the desired (given) behavior in the sliding mode
that will not depend on unwanted parameters (plant uncertainties and
external disturbances).
5
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
x2
1. Sliding surface design
x(0)
reaching phase
x1
sliding phase
2. SMC design
x 2 cx 1 0
0
x 2 c x1 u f ( x , t ) cx 2 0
uˆ eq cx 2
u eq f ( x , t ) cx 2
Sliding mode existence condition
Equivalent control
6
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
WHY Sliding mode control?
More than Robustness(insensitivity!!!!)
to disturbances
and uncertainties
WHEN Sliding mode control?
Control plants that operate in presence of
unmodeled dynamics, parametric uncertainties
and severe external disturbances and noise:
aerospace vehicles, robots, etc.
7
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
Numerical example:
x1 ( 0 ) 1 . 0 ,
x 2 ( 0 ) 0 .5,
f ( x , t ) 2 sin 10 t ,
c 1,
u x 2 2 . 5 sign
Features:
1. Invariance to disturbance
2. High frequency switching
8
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
Continuous and smooth sliding mode control
1. Continuous approximation via saturation function
sign
sat(/e)
1
e
-1
Numerical example:
x1 ( 0 ) 1 . 0 ,
x 2 ( 0 ) 0 .5,
f ( x , t ) 2 sin 10 t ,
c 1,
u x 2 2 . 5 sat ( / 0 . 01 )
9
UNAM
Dr. Leonid Fridman
Intuitive theory of Sliding mode control
Simulations
Features:
1. Invariance to disturbance is lost to some extend
2. Continuous asymptotic control
10
UNAM
Dr. Leonid Fridman
Second order Sliding mode control
1. Twisting Algorithm
sign sign
Features:
1.Convergence in finite time for and
2.Robustness INSENSITIVITY!!!!
2
3.Convergence O ( h )
11
UNAM
Dr. Leonid Fridman
New trends in sliding mode control
Chattering avoidance whit Twisting Algorithm (continuous control)
y 1 y 2
y 2 t , x ) t , x )
,0 m M , 0
y1
y 2
t )
for 1,
( t ) sign sign
for 1,
Features:
1.Convergence in finite time for and
2.Robustness
3.Convergence O ( h 2 )
12
UNAM
Dr. Leonid Fridman
Continuous Second order Sliding mode control
2. Super Twisting Algorithm
u x 2 15
0 .5
sign ( ) 20 sign ( ) d
0
Features:
1. Invariance to disturbance
2. Continuous control
13
UNAM
Dr. Leonid Fridman
Sliding mode observers/differentiators
3. Second Order ROBUST TO NOISE Sliding Mode Observer
y1 ( t ) x ( t ) v1 ( t ),
y 2 ( t ) x ( t ) v 2 ( t ).
xˆ 10 sign ( y xˆ )
2
8 sign ( y 1 xˆ )
14
UNAM
Dr. Leonid Fridman
Higher order Sliding mode control
4. High order slides modes controllers of arbitrary order
Features:
1.Convergence in finite time for
, ,...,
( r 1)
2.Robustness
3.Convergence O ( h r )
4.r-Smooth control
15
UNAM
Dr. Leonid Fridman
Higher order Sliding mode control
High order slides modes controllers of arbitrary order
16
UNAM
Dr. Leonid Fridman
CHATTERING ANALISYS
Frequency analysis
1. Frecuency Methods
modifications. Boiko,
Castellanos LF IEEE
TAC2004
2. Universal Chattering
Test. Boiko, Iriarte,
Pisano, Usai, LF
3. Chattering Shaping.
Boiko, Iriarte, Pisano,
Usac, LF
17
UNAM
Dr. Leonid Fridman
CHATTERING ANALISYS
Singularly Perturbed Approach
z f ( z , s , x , u )
(s,x)
S
s g 1 ( z , s , x )
g
x
PLANT
2
( z, s, x)
ACTUA
TOR
S
Integral Manifold
LF IEEE TAC 2001
Averaging
LF IEEE TAC 2002
Second Order Sliding Mode Controllers
18
UNAM
Dr. Leonid Fridman
UNDERACTUATED SYSTEMS
x 1 x 2 n ( t , x )
x 2 f ( x1 , x 2 , u ) m ( t , x )
SMC + H_{∞}
m
Uncertaint y
n
matched
unmatched
Fernando Castaños & LF
SMC + Optimal multimodel
Poznyak, Bejarano & LF
19
UNAM
Dr. Leonid Fridman
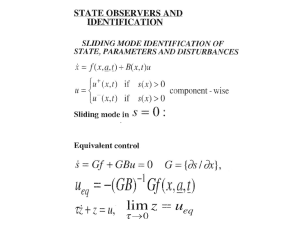
OBSERVATION & IDENTIFICATION VIA 2 -SMC
~
x1 ~
x2
e1 sgn( e1 )
~
x 2 g ( t , x1 , ~
x 2 , u ) sgn( e1 )
Uncertainty identification
Parameter identification
Identification of the time variant parameters
J. Dávila & LF
20
UNAM
Dr. Leonid Fridman
RELAY DELAYED CONTROL
s sgn s ( t 1)
Countable set of periodic
solutions=sliding modes
Countables etofperiod icso
Shustin, E. Fridman
LF 93
Set of Steady modes
21
UNAM
Dr. Leonid Fridman
CONTROL OF OSCILLATIONS AMPLITUDE
Only
sign
s ( t 1)
Is accessible
FFS 93------
s(t-1) is accessible
Strygin, Polyakov, LF
IJC 03, IJRNC 04
22
UNAM
Dr. Leonid Fridman
APPLICATIONS
Investigation and
implementation of 2-SMC
Shaping of Chattering
parameters
23