Lecture #22
advertisement

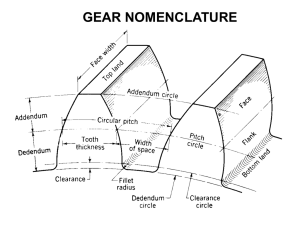
Lecture #22 FORCE SYSTEM ASSOCIATED WITH SPUR GEARS Course Name : DESIGN OF MACHINE ELEMENTS Course Number: MET 214 To design a power transmission system involving gears, it is necessary to relate the torque and/or horse power applied to a shaft to the forces acting on the teeth of the gears connected to the shaft. To analyze the force system existing with the use of gears, a brief overview will be presented concerning how the point of contact existing between the teeth of mating gears evolves as the gears rotate. Understanding how the point of contact existing between the teeth of mating gears evolves as the gears rotate will enable the forces acting on the gears to be related to the torque and/or horse power applied to the shafts connected to the gears. After the geometry of the force system has been quantified to the extent necessary to relate horse power and/or torque to forces transmitted between gears, a brief overview will be presented concerning the profile that gear teeth can use to transmit the forces in the manner described. Identifying the requirements for a gear tooth from the context of the force system existing between meshing gears prior to investigating the tooth profile facilitates understanding of why certain profiles are preferred for use as gear teeth. To investigate how the forces are typically transmitted between a pair of gears, consider the figures shown below. Each figure is provided with a caption describing certain features exhibited by the gears as the pinion is rotated. Based upon the figures provided on the previous slide, as gear #1 (pinion) rotates tooth A1 which is attached to gear 1 will subsequently pass through the positions previously occupied in figure 1 by tooth B1 and then tooth C1. As is evident from figures 1-3 as gear #1 rotates, the point of contact existing between tooth A1 and tooth A2 on the gear varies. As is further evident from the figure, if all of the points of contact generated between tooth A1 and tooth A2 are connected, a line results that is referred to as the line of action or the path of contact. As will be shown, having all points of contact existing between the teeth of meshing gears lie on the same line enables the gears to retain properties of the friction wheel alternative. As will be shown, the profile chosen for the gear teeth is fundamental to enabling the points of contact existing between the teeth of meshing gears to evolve along a line. The forces transmitted between a pair of gears is transmitted between the teeth of the gears at the points of contact. As evident from the figures shown above, more than one pair of teeth may be in contact at any particular orientation of the gears. In the figures shown above, 3 pairs of teeth are in contact at each orientation shown. Having more than one pair of teeth in contact distributes the load to be transferred via the gears relieving the demands placed on a single tooth. If the forces transmitted between the teeth of meshing gears are transmitted along the line of action at every point of contact, then regardless of the angular position of the gears, the forces transmitted between the gears maintain a fixed orientation in space. Maintaining a fixed orientation in space for the forces to be transmitted between gears enables the power transmitted between the gears to be independent of the angular position of the gears. This is a very desirable characteristic for gears to possess. To quantify the relationships existing among forces transmitted between gears with gear geometry including the diameter of the pitch circle, it is essential to define the orientation of the line of action relative to the geometry associated with meshing gears. To form a reference for specifying the orientation of the line of action, draw a line connecting the centers of the gears. The line connecting the gear centers will be referred to as the line of centers (see figure below). Next, draw a line perpendicular to the line of centers through the pitch point existing with the friction wheel implementation. The pitch point is the point of contact existing between the pitch circles associated with the gears. The pitch circles are indicative of the diameter that a friction wheel implementation must have in order to produce the same velocity and/or torque ratios that the gears will produce. The pressure angle φ is the angle between the line of action and the line perpendicular to the line of centers through the pitch point P. The pressure angle when measured from the line perpendicular to the line of centers thru the pitch point serves to define the orientation of the line of action. In order to properly specify the orientation of the line of action relative to the line perpendicular to the line of centers passing thru the pitch point P, it is necessary to establish a sign convention for use with the pressure angle 𝜑. In order to specify the orientation of the line of action properly, the driver of the gear pair must be identified and the direction of rotation of the diver must also be know. The line of action is rotated away from the line perpendicular to the line of centers in a direction that is opposite to the direction of rotation of the driver. In the example provided on the previous slide, the top gear is the driver and is declared to be rotating in a clockwise direction. Accordingly, as is evident from the figure, the line of action is rotated in a counterclockwise direction away from the line perpendicular to the line of centers through the pitch point. After the discussion concerning the base circles of gears is presented, the implications associated with the rule for orientating the line of action will be examined in the context of gear forces applied to the teeth of the gears. In order to identify additional requirements that the form of a gear tooth must posses so that the gear will provide the same speed ratio as the friction wheel implementation, draw radial lines from the center of each gear that are perpendicular to the line of action. The radial line from the center of gear 1 that is perpendicular to the line of action intersects the line of action at point D in the figure provided previously. The distance 𝑂1 𝐷 can be used to form a circle of radius 𝑟𝑏1 , referred to as the base circle of gear 1. The base circle of gear 1 is inscribed within the pitch circle of gear 1. The radius of the pitch circle of gear 1 is designated as 𝑟1 . As is evident from the geometry of the figure, the angle between the line of centers and the line segment 𝑂1 𝐷 is the pressure angle 𝜑. The radial line from the center of gear 2 that is perpendicular to the line of action intersects the line of action at point C. The distance 𝑂2 𝐶 can be used to form a circle of radius 𝑟𝑏2 , referred to as the base circle of gear 2, that inscribed within the pitch circle of gear 2. The radius of the pitch circle of gear 2 is designated as 𝑟2 . The angle between the line of centers and the line segment 𝑂2 𝐶 is the pressure angle 𝜑. As is evident from the initial figure presented as part of this lecture, the formation of teeth about the pitch circle of a friction wheel results in the creation of a line (more definitively a line segment) since the points of contact existing between the teeth vary along the line as the gears rotate. Such a situation is distinctly different from the friction wheel implementation that produces a single point of contact that is stationary as the gears rotate. Given the differences that exist between a pair of friction wheels and a pair of gear with respect to the points of contact, a question naturally arises as to how a gear can produce the same speed ratio as a friction wheel in light of such differences? In order to understand how it is possible for the evolution of the point of contact along the line of action to produce the same speed ratio as a friction wheel, the following relationships must be considered. Due to the geometry associated with the base circles illustrated in the previous slide, and the fact that the line of action is tangent to both of the base circles, the following relationships are evident. 𝑟𝑏1 = 𝑟1 cos 𝜑 𝑟𝑏2 = 𝑟2 𝑐𝑜𝑠𝜑 In light of the above relationships, considered just the base circles of a pair of gears in mesh and connect the two base circles by wrapping a thread around a portion of each base circle as shown in the figure below. Although the illustration provides additional features, the additional features will be ignored for the moment so the focus can be directed toward the motion existing along the line of action. As noted previously, the line of action is tangent to the base circles as shown. Consider the upper base circle to be associated with gear 1 and the lower base circle to be associated with gear 2. Since the thread is wrapped around only a part of each base circle, the thread departs the base circle along a tangent to the base circle. Accordingly, the thread assumes the same position between the base circles as the line of action shown in the previous slides. Assuming the thread does not stretch in response to rotation of the base circles, the rotation rate of the base circles may be related to one another through the linear velocity of a point on the thread, such as the knot in the thread shown on the previous slide. The following equations hold. 𝑉𝑡ℎ = 𝑟𝑏1 𝜔1 = 𝑟1 cos 𝜑 𝜔1 𝑉𝑡ℎ = 𝑟𝑏2 𝜔2 = 𝑟2 cos 𝜑 𝜔2 Since the thread is assumed not to stretch, the two expressions for 𝑉𝑡ℎ may be equated resulting in the following results. 𝑟1 cos 𝜑 𝜔1 = 𝑟2 cos 𝜑 𝜔2 Canceling like terms results in the same expression that the friction wheel implementation possess. 𝑟1 𝜔1 = 𝑟2 𝜔2 Accordingly, if a form for gear teeth can be found that results the teeth producing points of contact that move along a line at a constant rate related to the angular velocity of the gears, then the speed ratio of the gears will be the same as the fiction wheel implementation. In addition, in order to transmit the maximum amount of torque between the base circles of the gears, the forces generating the torques about the base circles needs to be co-linear with the line of action. Consequently, at each point of contact, the forces transmitted between the teeth in contact must lie along the line of action, which is tangent to the base circles. Assuming a gear shape can be found that possess such characteristics, then due to the principle of transmissibility of forces, the force existing at any point of contact can be moved along the line of action to the pitch point of the friction wheel implementation as shown on the next slide. If the tooth profile is selected properly, the line of action will also pass through the pitch point. Consequently the forces transmitted along the line of action can be slid along the line of action until either the tip or the tail of the force vector transmitted between the gear teeth coincides with the pitch point. The principle of transmissibility permits the forces to be relocated in this manner. The ability to translate the force vector along the line of action to the pitch point for any orientation of the gear due to all points of contact lying on the line of action enables the force system associated with the gears to be conveniently related to the power transmitted between the gears. The constructions involving the line of centers, the pitch point, the line perpendicular to the line of centers through the pitch point and the line of action are shown in a new figure which also includes a pair of teeth to emphasize that the forces transmitted between gears are due to the teeth contacting one another in a very prescribed manner to be discussed in more detail shortly. The illustration provided below locates the driver on the bottom of the gear pair which is different than the previous illustrations. Note also that the driver is rotating in a clockwise direction. As will be discussed, the profile for the gear teeth are chosen so that when the gear shown on the previous slide designated as the driver rotates in that direction indicated, the point of contact existing between the two teeth will move along the line of action from point P toward point E. The point of contact will stop short of E since the teeth are engaged only for a relatively small angular interval. As is evident from the geometry associated with the base circles, the pressure angle depends upon the ratio of the radius of the pitch circle to the radius of the base circle. 𝑟𝑏1 = 𝑟1 cos 𝜑 → 𝜑 = 𝑐𝑜𝑠 −1 𝑟𝑏1 𝑟1 As will be evident upon discussing the shape of the gear teeth in more detail in a subsequent lecture, the base circle is used to create the form for the gear teeth and this is why the geometry associated with the base circle influences the pressure angle. The force transmitted along the line of action results in a torque being generated at the base circle, which due to geometry can also be described in terms of the geometry of the pitch circle. Noting that the gear in the lower part of the figure provided previously is labeled as the driver, the torque transmitted to the driven gear can be calculated as follows. 𝑇𝑑𝑟𝑖𝑣𝑒𝑛 = 𝐹𝑛 𝑟𝑏2 Expressing the torque applied to the driven gear in terms of the radius of the pitch circle results in the following expression. 𝑇𝑑𝑟𝑖𝑣𝑒𝑛 = 𝐹𝑛 𝑟2 cos 𝜑 = 𝑟2 𝐹𝑛 cos 𝜑 = 𝑟2 𝐹𝑇 Where: 𝐹𝑇 = 𝑡𝑎𝑛𝑔𝑒𝑛𝑡𝑖𝑎𝑙 𝑓𝑜𝑟𝑐𝑒 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 𝑜𝑓 𝐹𝑛 𝑎𝑐𝑡𝑖𝑛𝑔 𝑎𝑡 𝑟𝑎𝑑𝑖𝑢𝑠 𝑜𝑓 𝑝𝑖𝑡𝑐ℎ 𝑐𝑖𝑟𝑐𝑙𝑒 As is evident from the derivation provided above, the force transmitted along the line of action may be resolved into a tangential component, and as will be evident from the diagram provided below, a radial component. The letter designating the forces has been changed from F to W in the diagram provided below, although such a change should not impede comprehension of the fundamentals illustrated in the diagram. In order to properly resolve the forces acting along the line of action into components so bending stresses, direction of resisting torques ,shaft size, deflection, etc, can be calculated properly, it is essential to realize that the above diagram illustrates the forces applied by the driver to the driven gear. As will be discussed in more detail, the force components applied to the driver by the driven gear are in the direction opposite of the force components shown on the driven gear of the previous diagram. The force components applied to the driver gear by the driven gear represents the reaction of the driven gear in response of the actions of the driver gear acting on the driven gear. In order to reinforce the relevance of the sign for the pressure angle, note that the direction of rotation of the driver is clockwise. In addition, note as the gears rotate and the tip of the arrow representing the direction of rotation of the driver converges toward the pitch point ( pitch point not explicitly shown on the diagram) the arrow representing the direction of rotation of the driver will merge with the line of action indicating the direction of the force the teeth of the driver gear will impart to the teeth of the driven gear. Since the emphasis of the drawing is in the context of the driver gear, the forces transmitted from the teeth of the driver to the teeth of the driven gear will be along the line of action in the direction of the arrow representing the direction of rotation of the driver when merging with the line of action. To emphasize these consideration of the force system existing with a gear pair, a diagram showing more detail of the situation is provided below. Although the direction of rotation of the driver can be used with a properly orientated line of action to establish the direction of the force and/or the force components acting on the driven gear as explained on the previous slide , a simpler technique involves the following. Note that if the pitch circles of the gears were envisioned as a rolling mill, then a piece of paper would flow though the rolling mill in only one direction. The direction that the piece of paper would flow establishes the direction of 𝐹𝑡 on the driven gear. Once the direction of 𝐹𝑡 on the driven gear has been determined, the direction of all other force components can be identified including the direction of the force components on the driver which will be opposite to the direction of the force components acting on the driven gear. The radial forces always act from the pitch point toward the center of the gear regardless of whether the gear is a driven or driver gear. Noting the information provided above enables the direction of all force components existing between a gear pair to be determined quite readily. The following relationships are evident from the figures shown above Ft Fn cos Fr Ft tan The reason for expressing Fn and Fr in terms of Ft, as opposed to alternative relationships that could be devised based on the existing geometry is that Ft is directly related to torque and/or horsepower acting on the friction wheel implementation since 𝐹𝑡 is the force vector that is perpendicular to the pitch circle. Accordingly, horsepower and/or torque requirements to be transmitted by a gear system are typically expressed in terms of Ft. After determining Ft , the magnitude of the other force components and/or their directions can be readily determined. Recall the following relationship existing between speed, torque, power. P Tw where P power watts T torque N-m w angular velocity rads/sec P T w Alternatively, Tn 63,000 63,000P T n PHP where PHP power, H.P. T torque in-lbs n angular velocity in rpm Using geometry associated with the pitch circles: T Ft R D T Ft 2 2T Ft D where Ft tangential force component of force wn being transmitted between gears R radius of pitch circle Substituting for the expressions of torque in terms of power levels to the following equations 2 63,000 P D n 126,000P Ft nD Ft where wt = lbs Power can also be expressed in terms of wt and the pitch line velocity vt. P wt vt where P power in watts wt force N vt velocity m/s or in terms of customized units Fv 1m 1H .P P Ft vt t t 60 s 550 ft lbs 33,000 sec where vt Ft P velocity in ft/min force in lbs power in HP The above expression can be rearranged to solve for wt in terms of customized units Ft P 33,000 vt Accordingly, to relate horsepower and/or torque applied to a shaft to the forces acting on gears, calculate Ft from HP or torque using the formulas provided above. After Ft is calculated, determine Fr and Fn provided previously. After all force components are known, shear and moment diagrams, torque diagrams and other analysis tools can be employed (angle of twist, deflection) to assist in designing a shaft for use with gear systems. To reinforce the geometry involved in analyzing the force system associated with the use of gears, consider the diagram shown below. Note: Fr serves to separate the shafts connected to the gears and for this reason Fr is sometimes referred to as the separating force. It should be noted, a distinction must be made as always, between the forces and/or torques acting on the gear due to the pinion as opposed to the reaction forces acting on the pinion due to the gear. The reaction forces acting on the pinion are equal and opposite to the acting on the gear due to the pinion. The determination of the driver and the driven gear are made of an analogous basis provided for pulleys. Accordingly, the procedure for determining the driver and driven gear of a pair will not be presented. The subsequent lecture will be devoted to working problems to reinforce the material presented herein.