Lecture #21
advertisement

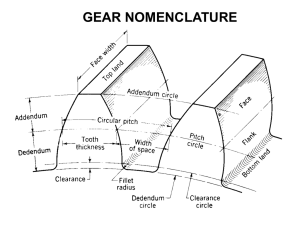
Lecture #21 SPUR GEARS Course Name : DESIGN OF MACHINE ELEMENTS Course Number: MET 214 To develop the relationships that characterize spur gears, consider a pair of wheels transmitting torque from one shaft to another via friction existing at a point of contact. As friction wheel #1 rotates, wheel #2 rotates due to friction between wheel #1 and wheel #2. The common point of contact has a velocity that can be expressed in terms of either friction wheel. v r1 1 v r2 2 where r1 radius of friction wheel #1 1 angular speed of wheel #1 rads/ sec radius of friction wheel #2 r2 angular speed of wheel #2 rads/ sec 2 Equating expressions for 𝑣 leads to the following relationships. r1 1 r2 2 where r1 n1 r2 n 2 n1 D 1 n 2 D 2 n1 n2 D1 D2 speed of friction wheel #1 rpm speed of friction wheel #2 rpm diameter of friction wheel #1 diameter of friction wheel #2 Rearranging: n 2 n1 D1 D2 Relationship for scaling torque transmitted between friction wheels can be developed by equating expressions for HP associated with each shaft. HP T1 n1 63 , 000 T 2 T1 T2 n 2 63 , 000 T1 n1 T 2 n 2 n1 n2 Using the expressions involving speed and diameter from above results in the following, T 2 T1 D2 D1 Friction wheels are prone to slippage. When transferring large amounts of power, slippage can cause shock and must be avoided. To avoid slippage, friction wheels can be modified by forming a periodic arrangement of protrusions and furrows around the periphery of each friction wheel to interlock (mesh) one wheel to another. The protrusions on one friction wheel mate with the furrows on the adjacent wheel to provide a mechanical means for interlocking the wheels and avoiding slippage. The protrusions are referred to as teeth, and the modified friction wheels are termed gears. When forming a gear, it is desirable to shape the teeth and/or form the teeth so that a pair of meshing gears retain the same speed and/or torque ratios that would be associated with the friction wheel implementation from which the gears are formed. The figure on the next slide shows how the friction wheels may be modified to produce a pair of mating gears. The friction wheels implementations for the gears shown in the figure are represented by circles referred to as pitch circles. The teeth of each gear extends above and below the corresponding pitch circle of the gear as shown in the diagram. The pitch circle of each gear contact each other at one point referred to as the pitch point which is designated as point P in the figure above. The pitch point P lies on the line connecting the centers of each gear. The radius of the pitch circle enables the rotational rate of the friction wheel implementation to be related to the tangential linear velocity at the pitch point. The tangential linear velocity would be the velocity of that a piece of paper would have if the friction wheels were envisioned as a pair of rollers and the paper was feed between the rollers. Note that the teeth on each gear are spaced uniformly around the peripheral of the pitch circle of the gear. The distance from a point on one tooth of a gear to the same point on an adjacent tooth when measured along the arc of the pitch circle is referred to as circular pitch and is designated as 𝑃𝐶𝐴 for gear A and 𝑃𝐶𝐵 for gear B. The spacing between adjacent teeth on a gear is approximately .5 𝑃𝐶 in general. The spacing between adjacent teeth on one gear enables the teeth on the other gear to protrude into the spacing enabling the pair of gears to avoid slippage. Such a set of circumstances is referred to as meshing. The following expression relates the number of teeth 𝑁𝐴 of gear A to the diameter 𝐷𝐴 of the pitch circle of gear A. 𝑁𝐴 𝑃𝐶𝐴 = 𝜋 𝐷𝐴 A similar expression holds for gear B. 𝑁𝐵 𝑃𝐶𝐵 = 𝜋 𝐷𝐵 In order to understand the relationship that must exist between 𝑃𝐶𝐴 and 𝑃𝐶𝐵 when two gears are in mesh, consider the next two slides. The teeth on each gear are numbered to enable the location of the teeth to be tracked as the gears rotate. The figure below shows the position of the teeth on each gear after gear B has rotated an amount necessary to position tooth 2B at the location previously occupied by tooth 1B on the previous slide. Since gear B has advanced by one tooth, the arc length traversed by the teeth on gear B as measured along the pitch circle is 𝑃𝐶𝐵 . Since the pitch circles are in contact at one point and are assumed to roll with out slipping, the arc length traversed by each tooth on gear A as measured on the pitch circle of gear A must be the same. Consequently, the circular pitch of each gear must be the same when a pair of gears are in mesh. 𝑃𝐶𝐴 = 𝑃𝐶𝐵 = 𝑃𝐶 = 𝑃 The above requirement will be used to relate the speed ratio and/or torque ratio existing between a pair of gears to a teeth ratio. The following figure identifies additional gear teeth characteristics. A detailed description of the gear teeth will be presented in a subsequent lecture. When two gears mesh, the smaller gear is called the pinion and the larger the gear. DP DG Pitch diameter of pinion Pitch diameter of gear N = number of teeth uniformly distributed around the periphery of a gear. P = circular pitch : the distance from a point on a tooth of a gear to the corresponding point on the next adjacent tooth measured along the pitch circle. N P P 2 rP D P N G P 2 rG D G Accordingly, each of the expression above that involve P can be rearranged and equated to develop relationships between gears in mesh. NG DG N P P DP NG DG P NP DP NG NP DG DP eq. 8-22 page 363 in book by Mott Since the teeth and/or gears are designed to have the pitch circles contact at a single point in order to retain the desirable properties of friction wheels, the following relationships also hold for meshing gears. n P D P nG DG DG DP nP nG Equating the above expression to the previous expression involving teeth numbers results in the following relationships NG NP nP nG N G nG N P n P N nG n P P NG D nG n P P DG The above expressions can be utilized to develop alternative expressions involving torque transmitted between gear pairs as shown below. T P n P TG n G TG T P nP nG TP NG NP TP DG DP The equation pertaining to circular pitch may be rearranged to assist in the formulation of a new definition as shown below. 𝑁𝑃= 𝜋𝐷 → 𝑁 𝑃 𝐷 = 𝜋 → 𝑃𝑑 𝑃 = 𝜋 Where 𝑃𝑑 = 𝑑𝑖𝑎𝑚𝑒𝑡𝑟𝑎𝑙 𝑝𝑖𝑡𝑐ℎ The diametral pitch is the number of teeth per inch of pitch diameter. The tables below present the standards for use with circular pitch and diametral pitches. Teeth size as a function of diametral pitch are shown in the figure below. Several pairs of gears may be cascaded to form a gear train. A gear train is one or more pairs of gears operating together to transmit power. Frequently, as power is transmitted from one shaft to another, the particular speed/torque combination associated with the power needs to be adjusted. The speed/torque ratios existing from shaft to shaft may be adjusted by meshing gears with the appropriate ratio of teeth. As demonstrated by the example provided below, there are some techniques that can be used to simplify the determination of the speed of the output shaft of a gear train given the speed of the input shaft. For the example shown below, determine the speed of output shaft #3 if the input shaft has a speed of 1750 rpm clockwise as shown below. In order to systematize the process of relating the output shaft speed to the input shaft speed of a gear train, define the following quantity. VR inputspeed Where VR = velocity ratio outspeed Define a velocity ratio for each pair of gears that are in mesh in the gear train. VR 1 VR 2 nA nB NB N nC nD 3 .5 A ND NC TV TrainValue TV VR 1 VR 2 TV nA->input shaft speed nD->output shaft speed nA nD nD nA TV TV is positive if input & out shafts rotate in the same direction – negative otherwise A convenient manner to determine direction of rotation of the output shaft relative to the input shaft involves determining the following value: −1𝐶 where C is the number of gear pairs in the train. If −1𝐶 is negative, then output shaft rotates in a direction opposite to input shaft. In the example above C = 2 so output and input shafts rotate in the same direction since −1𝐶 = −12 = 1. For the gear train shown below, compute TV and compute the speed of the shaft carrying gear E if the shaft carrying gear A rotates at 1750 rpm.