Document
advertisement

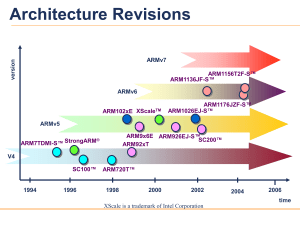
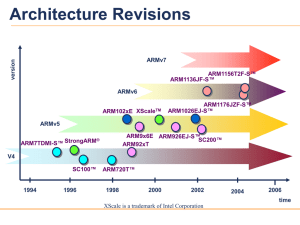
The ARM Microcontroller T H E A R C H I T E C T U R E F O R T TM H E D I G I T A L W O R 1L D ARM Ltd • Founded in November 1990 – Spun out of Acorn Computers • Designs the ARM range of RISC processor cores • Licenses ARM core designs to semiconductor partners who fabricate and sell to their customers. – ARM does not fabricate silicon itself • Also develop technologies to assist with the design-in of the ARM architecture – Software tools, boards, debug hardware, application software, bus architectures, peripherals etc HISTORY • 1995: Introduction of Thumb and ARM8. • 1996 – 2000: Alcatel, Huindai, Philips, Sony, use ΑRM, while in 1999 η ARM cooperates with Erickson for the development of Bluetooth. • 2000 – 2002: ARM’s share of the 32 – bit embedded RISC microprocessor market is 80%. ARM Developer Suite is introduced. ARM System - On - Chip Architecture 3 HISTORY • 1985: Acorn Computer Group manufactures the first commercial RISC microprocessor. • 1990: Acorn and Apple participation leads to the founding of Advanced RISC Machines (A.R.M.). • 1991: ARM6, First embeddable RISC microprocessor. • 1992 – 1994: Various companies use ARM (Sharp, Samsung), while in 1993 ARM7, the first multimedia microprocessor is introduced. PREREQUISITES • Before studying ARM, we should be familiar with the following terms. I. Context switching II. Exception handling III. Data alignment IV. Watchdog timer V. Barrel shifter VI. CISC and RISC CONTEXT SWITCHING • Context is basically the state or situation of any particular event .when this word is used in technical terms then it refers to the state of the instruction or thread or task or any mode. • Context switching can be defined as the storing of the current state of any thread to be performed at a later stage. WHY TO SWITCH? • Context switching is done for the better efficiency of the execution. Context switching comes into play in a condition when the need for the immediate change of mode or process occurs. For such condition we are required to save the current status of the ongoing process, so that we can access this data later after the immediate chance in successfully served. DATA ALIGNMENT • Data alignment refers to the storage of data at a location from where it takes the minimum number of operation cycles for the processor to read the data. The task execution process in a processor is basically divided into two parts; reading/writing the data and processing the data. And generally speaking, reading/writing the data is responsible for the majority portion of the time taken in task execution. Therefore, if data is properly aligned in the memory device then the time taken for the execution of the task is reduced to a great extent. DATA ALIGNMENT IN ARM WATCHDOG TIMER • Watchdog timer is a device that is used to prevent the system from false functioning. This WDT trigger various kind of command to protect system from committing error. All such act that a WDT executes in order to safeguard the system from doing any mistake are known as Corrective measures. Along with correcting the error, this device also work on the detection of the fault in the system. MECHANISM OF WATCHDOG TIMER • When system is working properly then the watchdog timer remains in the started state. • Mechanism of watchdog timer is done by an ON-OFF action. Its mechanism works in following ways:• As soon as any external action, fault on any internal flow turns on and watchdog timer off then the watchdog timer will elapse and procedure a timeout signal .this timeout will enable the correction action to move the system in safe mode EXCEPTION HANDLING • The ARM architecture supports a range of interrupts, traps and supervisor calls, all grouped under the general heading of exceptions. The general way these are handled is the same in all cases: • The current state is saved by copying the PC into rl4_exc and the CPSR into SPSR_exc (where exc stands for the exception type). • The processor operating mode is changed to the appropriate exception mode. • The PC is forced to a value between 0016 and 1C16, the particular value depending on the type of exception. WHY DOES IT OCCUR? • Atomic instructions are long and complex set of instructions and hence they use various shared resources for long operation cycles. Since we know that if a single resource is accessed by multiple tasks at the same time then it can produce false results in both the tasks, therefore we keep the interrupt signal disabled during the execution of an atomic instruction. CISC • CISC is a self explanatory term that works towards making the instruction more complex in order to reduce the semantic gap lying between the instruction and machine codes. This complex instruction is a sequence of numerous critical operations. And hence number of clock cycles is taken for the execution of one single instruction. RISC • The concept of RISC came in 1980 by Patterson and Ditzel which was further supported by Berkely. Berkely gave the design of RISC I over CISC processor which has high performance level. Early RISC projects: IBM 801 (America), Berkeley SPUR, RISC I and RISC II and Stanford MIPS. FEATURES OF RISC • 1.RISC execute a instruction in one cycle and it has a fixed instruction length of 32 bit while in the case of CISC it has variable instruction length of different format and it take several cycle to execute a instruction. • RISC uses pipelining technique. In pipelining two or more instruction is been executed at a time and this improve the utilization of the hardware resources. A less of pipelining is used in CISC. BARREL SHIFTER • A barrel shifter is a digital circuit that can shift a data word by a specified number of bits in one clock cycle. It can be implemented as a sequence of multiplexers (mux.), and in such an implementation the output of one mux is connected to the input of the next mux in a way that depends on the shift distance. SCHEMATIC OF SHIFTER Using the Barrel Shifter: The Second Operand Register, optionally with shift operation Operand 1 Operand 2 – Shift value can be either be: • 5 bit unsigned integer • Specified in bottom byte of another register. – Used for multiplication by constant Barrel Shifter Immediate value – 8 bit number, with a range of 0-255. • Rotated right through even number of positions ALU Result – Allows increased range of 32-bit constants to be loaded directly into registers DATA SIZES AND INSTRUCTION SETS • The ARM is a 32-bit architecture. • When used in relation to the ARM: – Byte means 8 bits – Half word means 16 bits (two bytes) – Word means 32 bits (four bytes) • Most ARM’s implement two instruction sets – 32-bit ARM Instruction Set – 16-bit Thumb Instruction Set • Jazelle cores can also execute Java bytecode The ARM Register Set Current Visible Registers Abort Mode SVC Undef Mode Mode IRQ FIQ User Mode Mode Mode r0 r1 r2 r3 r4 r5 Banked out Registers r6 r7 r8 r9 r10 r11 User FIQ IRQ SVC Undef Abort r8 r9 r10 r11 r8 r9 r10 r11 r12 r13 (sp) r12 r13 (sp) r12 r13 (sp) r13 (sp) r13 (sp) r13 (sp) r13 (sp) r14 (lr) r15 (pc) r14 (lr) r14 (lr) r14 (lr) r14 (lr) r14 (lr) r14 (lr) spsr spsr spsr spsr spsr cpsr spsr Register Organization Summary User r0 r1 r2 r3 r4 r5 r6 r7 FIQ User mode r0-r7, r15, and cpsr r8 r9 r10 r11 r12 r13 (sp) r8 r9 r10 r11 r12 r13 (sp) r14 (lr) r15 (pc) IRQ User mode r0-r12, r15, and cpsr SVC User mode r0-r12, r15, and cpsr Undef User mode r0-r12, r15, and cpsr Abort User mode r0-r12, r15, and cpsr Thumb state Low registers Thumb state High registers r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) r13 (sp) r14 (lr) spsr spsr spsr spsr spsr cpsr Note: System mode uses the User mode register set The Registers • ARM has 37 registers all of which are 32-bits long. – – – – 1 dedicated program counter 1 dedicated current program status register 5 dedicated saved program status registers 30 general purpose registers • The current processor mode governs which of several banks is accessible. Each mode can access – – – – a particular set of r0-r12 registers a particular r13 (the stack pointer, sp) and r14 (the link register, lr) the program counter, r15 (pc) the current program status register, cpsr Privileged modes (except System) can also access – a particular spsr (saved program status register) Program Status Registers 31 28 27 NZCVQ f • 23 J 16 15 8 N = Negative result from ALU Z = Zero result from ALU C = ALU operation Carried out V = ALU operation oVerflowed • • • – Architecture 5TEJ only – J = 1: Processor in Jazelle state 5 4 0 Interrupt Disable bits. T Bit – Architecture xT only – T = 0: Processor in ARM state – T = 1: Processor in Thumb state Sticky Overflow flag - Q flag J bit 6 – I = 1: Disables the IRQ. – F = 1: Disables the FIQ. – Architecture 5TE/J only – Indicates if saturation has occurred • 7 I F T mode c U n d e f i n e d s x Condition code flags – – – – • 24 Mode bits – Specify the processor mode Program Counter (r15) • When the processor is executing in ARM state: – All instructions are 32 bits wide – All instructions must be word aligned – Therefore the pc value is stored in bits [31:2] with bits [1:0] undefined (as instruction cannot be halfword or byte aligned). • When the processor is executing in Thumb state: – All instructions are 16 bits wide – All instructions must be halfword aligned – Therefore the pc value is stored in bits [31:1] with bit [0] undefined (as instruction cannot be byte aligned). • When the processor is executing in Jazelle state: – All instructions are 8 bits wide – Processor performs a word access to read 4 instructions at once Exception Handling • When an exception occurs, the ARM: – Copies CPSR into SPSR_<mode> – Sets appropriate CPSR bits • Change to ARM state • Change to exception mode • Disable interrupts (if appropriate) – Stores the return addr LR_<mode> – Sets PC to vector address • To return, exception handler needs – Restore CPSR from SPSR_<mode> – Restore PC from LR_<mode> This can only be done in ARM state. 0x1C 0x18 0x14 0x10 0x0C 0x08 0x04 0x00 FIQ IRQ (Reserved) Data Abort Prefetch Abort Software Interrupt Undefined Instruction Reset Vector Table Vector table can be at 0xFFFF0000 on ARM720T and on ARM9/10 family devices