Bode Plots
advertisement

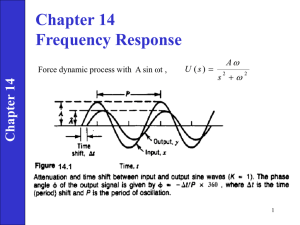
C2: Hydraulic Position Control System Yang Lin yal596@mail.usask.ca Rm. 1B15 Objectives • Study the use of Bode plots to determine the open-loop and closed-loop transfer functions of an electro-hydraulic position control system from experimental sinusoidal frequency response data Procedure Outline • Review – Frequency Response – Common Bode Plots – Study the electro-hydraulic position control system • Experiment 1: Use function generator to apply sinusoidal input, use output to create Bode Plots and Transfer Functions. Procedure Outline • Experiment 2: Use signal analyzer to create Bode Plots, using plots create Transfer Functions. • Experiment 3: Use signal analyzer to measure close loop response and compare this to the theoretical response. Review Outline • Frequency Response • Bode Plots • Experimental System Review Outline • Frequency Response • Bode Plots • Experimental System Frequency Response Figure 1: General SISO System But what if we want to study the system in the frequency domain? What action must the input and output create to measure frequency? ei t A sint xt B sin t Are these the same? Frequency Response (Con’t) Figure 2: Input-Output response relationship Will the Amplitude of the input and output be the same? Will the frequency be the same? Frequency Response (Con’t) Laplace Transform: G( s) X ( s) Ei ( s) Figure 3: Plant diagram. How do we change from continuous to frequency domain? s → jω Magnitude Frequency Response: Phase Frequency Response: G( j) G( j ) B A Review Outline • Frequency Response • Bode Plots • Experimental System Bode Plots To find the Magnitude (M), substitute in different values of ω and solve the following: M 20 logG j To find the Phase Shift (φ), substitute in different values of ω and solve the following: tan1 G( j) But what if the transfer function has imaginary and real terms, or perhaps a numerator and denominator? Bode Plot: Magnitude Numerator and Denominator Present: Num( j ) M 20 logG ( j ) 20 log Den( j ) M 20 logNum( j ) 20 logDen( j ) Real and Imaginary Terms Present: M 20 log G ( j ) 20 log Im j Re M 20 log Im2 Re 2 Bode Plot: Phase Numerator and Denominator Present: G( j) NUM DEN Real and Imaginary Components Present: Im Example: (2,1) G(j2) = 2j + 1 φ Re 2 tan 63.43 1 1 Bode Plots: Case 1 Gs K 20 log|K| M dB M 20 log G j 20 log K 0 rad/s 0 degrees 0 rad/s tan1 0 0 Bode Plots: Case 2 1 G s s 20 -20 dB/decade dB 0 0.1 rad/s 1 10 M 1 20 log 1 1 20 log 0 1j 1 M 0.1 20 log M 10 20 log -20 Phase angle 1 1 20 log 20 0.1 j 0 . 1 1 1 20 log 20 10 j 10 tan1 0 tan1 90 0 -90 degrees Bode Plots: Case 3 G s K s -20 dB/decade 20 log|K| 0 1 rad/sec 1 M G( j ) M K M s K 1 s 90 0 -90 degrees Bode Plots: Case 4 G s 1 1 M G (0) 20 log 20 log 0 0j 1 1 1 0.1n j n M G ( jn ) 20 log 1 n j n M G ( j10n ) 20 log 1 n 0.1 1 2 1 1 10n j 1 20 log 20 log 1 12 12 20 log 1 s n n M G ( j 0.1n ) 20 log 1 2 0 3.01dB 0 1 102 12 1 n 20dB -20 dB/decade Bode Plots: Case 4 0 1 0 n 0 1 G s j 1 0 90 90 n j 1 j 0.1n j 0.1n 1 n 1 s n 1 1 5.71 0 jn 1 45 n jn 1 j10n j10n 1 1 84.29 90 n 0.1n n -45 -90 10n Bode Plots: Case 5 n 2 Gs 2 2 s 2n s n Can we simplify? What does ξ really mean? Can we let ξ equal some value to help simplify the equation? ξ=1 n 2 n 2 n2 1 Gs 2 2 2 2 2 s n s 12 s 2n s n s 2n s n n Bode Plots: Case 5 The equation from the last slide may be written as: 1 1 G s 2 s 1 s 1 s 1 n n n 1 n 0.1n n -90 -180 -40 dB/decade 10n All we need to do is double both of the plots from Case 4 Bode Plots: Case 6 G s 100 ss 10 Let’s simplify the above equation into forms we have studied, 100 1 1 10 G s s s 10 s s 1 10 Review Outline • Frequency Response • Bode Plots • Experimental System Experimental System Function Generator Amplifier Valve Recorder Load Transducer Experimental System (Con’t) Function Amplitude Generator Valve Load Transducer G(s) Recorder G( s) X mm X mm ( s) Ei ( s) Xv Xv K v 0.078V / m m Xv G( s) Ei K v Experiment 1: • • • • • Obtain transducer sensitivity, Kv. Apply sinusoidal input and obtain output. Create Bode plots from output data. Obtain open-loop TF. Predict closed-loop TF. Experiment 1 (Con’t) Open-Loop TF: What form will our TF take? (max slope, max angle) K G (s) s How can we find K? @ ω = 1, G ( j ) 20 log K G j K 10 20 Calculate K for our experimental data Experiment 1 (Con’t) Closed-Loop TF: Ei(s) G(s) Kv(s) What form will our TF take? Gs T ( s) 1 Gs K v What is our Closed-Loop TF? Experiment 2: • • • • • Setup FFT signal analyzer. Obtain data and import to Excel. Obtain Bode Plots. Obtain open-loop TF. Predict closed-loop TF. Experiment 2 (Con’t) Open-Loop TF What is the final phase shift? What is the maximum magnitude slope? How do these two properties help describe the order of the system? Kn2 G( s) 2 s s 2 n s n2 We must find K, ωn, ζ Experiment 2 (Con’t) Finding ωn: -Again, if we break up the assumed TF into its smallest components we get, n2 1 G( s ) K 2 s s 2 n s n2 @ ωn, <φ3 = -90 @ all ω, <φ2 = -90 @ all ω, <φ1 = 0 <G(jωn) = <φ1 + <φ2 + <φ3 Experiment 2 (Con’t) 0 -90 @ ωn, -90 <G(jωn) = <φ1 + <φ2 + <φ3 Therefore @ ωn the phase angle should be -180 Experiment 2 (Con’t) Finding K: -If we break up the assumed TF into its smallest components we get, n2 1 G( s ) K 2 s s 2 n s n2 @ ω < ωn, |M3| = 0 dB @ ω = 1, |M2| = 0 dB @ any ω, |M1| = 20 log |K| |G(jω)| = |M1| + |M2| + |M3| Experiment 2 (Con’t) 0 0 @ω=1 |G(j*1rad/s)| = |M1| + |M2| + |M3| Therefore, |G(j*1rad/s)| = |M1| = 20 log |K| Experiment 2 (Con’t) Finding ζ: -We have two Bode plots to choose from to help solve for ζ, magnitude and phase. -In order to use either plot we must make our transfer function comparable by changing to the frequency domain, ie. replace s→jω, Kn2 G j j j 2 2n j n2 Notice we are still left with two unknowns, ζ and ω But only one equation! Experiment 2 (Con’t) -Since we are trying to find ζ, we need to replace ω with a suitable value. Replacing ω→ωn, Kn2 G jn jn jn 2 2n jn n2 Kn2 G jn jn 1n2 2 jn2 n2 Kn2 Kn2 G jn 2 jn 2 jn 1 2n3 G jn K 2 n Experiment 2 (Con’t) -Which Bode plot should we compare to? Using the Magnitude plot, G jn 20 log K 2 n K 2n 10 G jn 20 Experiment 2 (Con’t) Closed-Loop TF: Ei(s) G(s) Gs T ( s) 1 Gs K v Kv(s) Due to no zeros in G(s), the closed-loop TF takes one of two forms: K cl T1 * s s s s 1 1 1 T1 T2 T3 Must be all real poles T2 * s K cln2 s 2 2 1 s 2 n s n T 1 real pole, others can be real or imaginary Experiment 2 (Con’t) -To find which form to use we must factor out T(s). We have: -1 real pole -2 imaginary poles Therefore we must find Kcl, T, ζ and ωn. T2 * s K cln2 s 2 2 1 s 2 n s n T Experiment 2 (Con’t) Finding ωn and ζ: -We can equate the poles from the second order system -Using a calculator/Matlab the poles may be found, with the imaginary poles being, s a bj Therefore, s a jbs a jb s2 2n s n2 s 2 2as a2 b2 s 2 2n s n2 With, a 2 b2 n2 and 2a 2 n Finding Kcl: -Equate the numerator of T2*(s) to the predicted numerator of T(s). Experiment 2 (Con’t) -Now we must observe the effects of closing the loop: What happens to the poles? What happens to the damping ratio? What happens to the natural frequency? Experiment 3: • Close the loop in the system. • Get Bode Plot from the signal analyzer • Draw asymptotes derived from the theoretical model onto the Bode Plot of the experimental results • Compare results